
Virtual In Situ Calibration for Operational Backup Virtual Sensors in Building Energy Systems



Abstract
:1. Introduction
2. Virtual In-Situ Calibration for Backup Virtual Sensors
2.1. VIC Formulation: Distance and Correction Functions
2.2. Bayesian Inference
3. Application
3.1. Target Backup Virtual Sensor Modeling
3.2. VIC Formulation
4. Results and Discussion
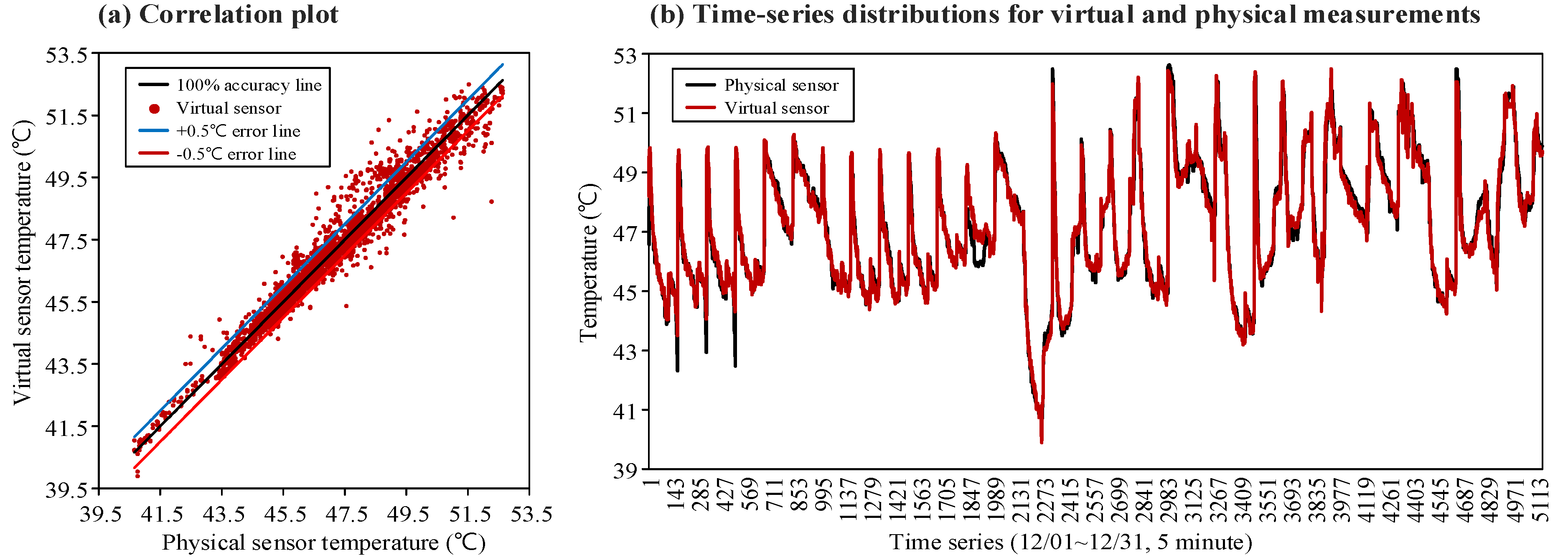
4.1. Measurements from IBVS
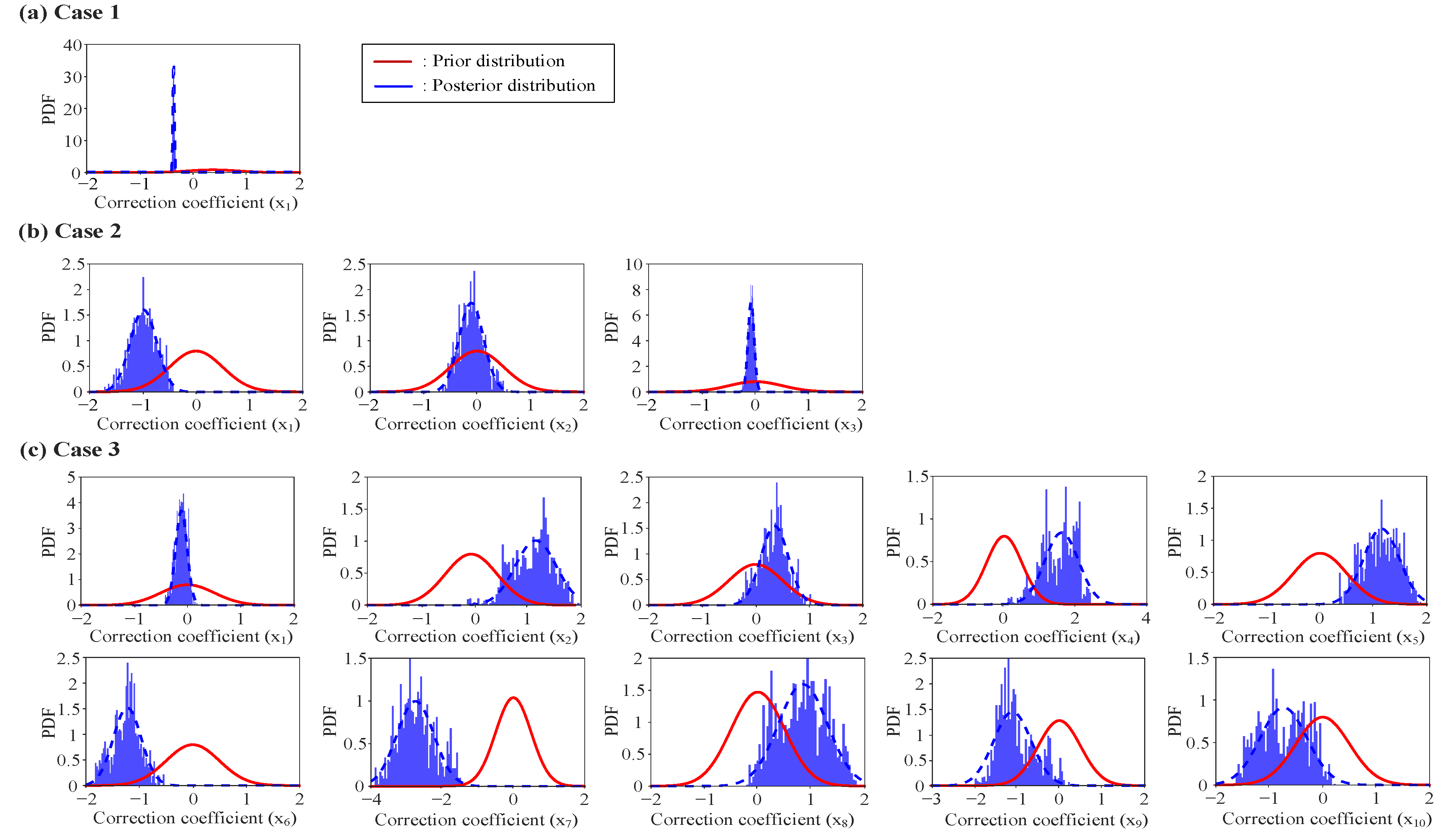
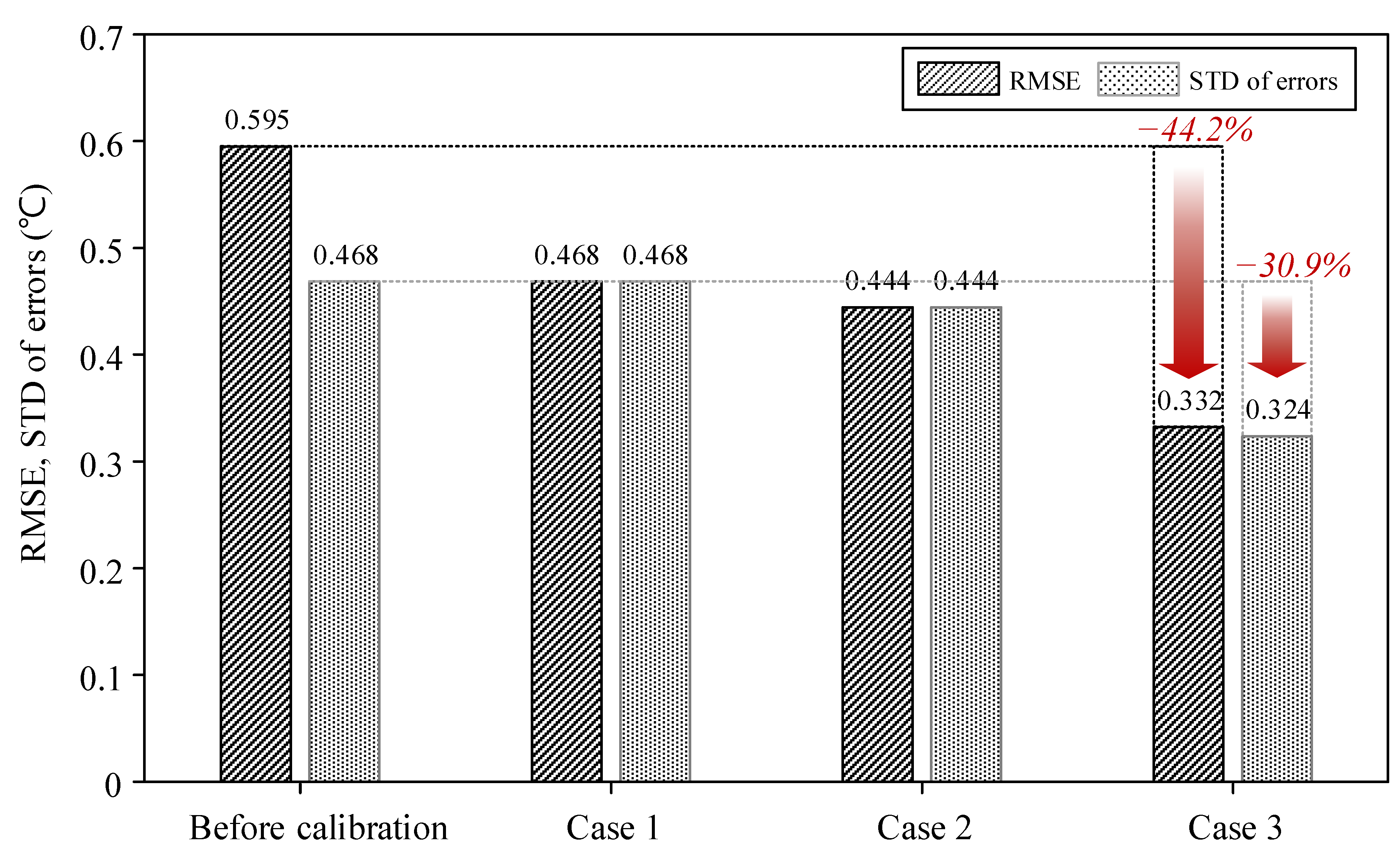
4.2. Calibrated Backup Virtual Sensors
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Li, H.X.; Gül, M.; Yu, H.; Awad, H.; Al-Hussein, M. An energy performance monitoring, analysis and modelling framework for NetZero Energy Homes (NZEHs). Energy Build. 2016, 126, 353–364. [Google Scholar] [CrossRef]
- Xiao, F.; Zhao, Y.; Wen, J.; Wang, S. Bayesian network based FDD strategy for variable air volume terminals. Autom. Constr. 2014, 41, 106–118. [Google Scholar] [CrossRef]
- Ma, Z.; Yan, R.; Li, K.; Nord, N. Building energy performance assessment using volatility change based symbolic transformation and hierarchical clustering. Energy Build. 2018, 166, 284–295. [Google Scholar] [CrossRef]
- Lee, T.; Yoon, S.; Won, K. Delta-T-based operational signatures for operation pattern and fault diagnosis of building energy systems. Energy Build. 2022, 257, 111769. [Google Scholar] [CrossRef]
- Afram, A.; Janabi-Sharifi, F. Theory and applications of HVAC control systems—A review of model predictive control (MPC). Build. Environ. 2014, 72, 343–355. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, C.; Zhang, Y.; Wang, Z.; Li, J. A review of data mining technologies in building energy systems: Load prediction, pattern identification, fault detection and diagnosis. Energy Built Environ. 2020, 1, 149–164. [Google Scholar] [CrossRef]
- Yu, D.; Li, H.; Yu, Y.; Xiong, J. Virtual calibration of a supply air temperature sensor in rooftop air conditioning units. HVAC R Res. 2011, 17, 31–50. [Google Scholar] [CrossRef]
- Li, H.; Yu, D.; Braun, J.E. A review of virtual sensing technology and application in building systems. HVAC R Res. 2011, 17, 619–645. [Google Scholar] [CrossRef]
- Bellanco, I.; Fuentes, E.; Vallès, M.; Salom, J. A review of the fault behavior of heat pumps and measurements, detection and diagnosis methods including virtual sensors. J. Build. Eng. 2021, 39, 102254. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H. Virtual in-situ calibration method in building systems. Autom. Constr. 2015, 59, 59–67. [Google Scholar] [CrossRef] [Green Version]
- Yoon, S.; Yu, Y. Extended virtual in-situ calibration method in building systems using Bayesian inference. Autom. Constr. 2017, 73, 20–30. [Google Scholar] [CrossRef] [Green Version]
- Ploennigs, J.; Ahmed, A.; Hensel, B.; Stack, P.; Menzel, K. Virtual sensors for estimation of energy consumption and thermal comfort in buildings with underfloor heating. Adv. Eng. Inform. 2011, 25, 688–698. [Google Scholar] [CrossRef]
- Yoon, S.; Choi, Y.; Koo, J.; Hong, Y.; Kim, R.; Kim, J. Virtual Sensors for Estimating District Heating Energy Consumption under Sensor Absences in a Residential Building. Energies 2020, 13, 6013. [Google Scholar] [CrossRef]
- Kim, R.; Hong, Y.; Choi, Y.; Yoon, S. System-level fouling detection of district heating substations using virtual-sensor-assisted building automation system. Energy 2021, 227, 120515. [Google Scholar] [CrossRef]
- Cotrufo, N.; Zmeureanu, R.; Athienitis, A. Virtual measurement of the air properties in air-handling units (AHUs) or virtual re-calibration of sensors. Sci. Technol. Built Environ. 2019, 25, 21–33. [Google Scholar] [CrossRef]
- Choi, Y.; Yoon, S. Virtual sensor-assisted in situ sensor calibration in operational HVAC systems. Build. Environ. 2020, 181, 107079. [Google Scholar] [CrossRef]
- Yoon, S. In-situ sensor calibration in an operational air-handling unit coupling autoencoder and Bayesian inference. Energy Build. 2020, 221, 110026. [Google Scholar] [CrossRef]
- Li, M.; Lu, Q.; Bai, S.; Zhang, M.; Tian, H.; Qin, L. Digital twin-driven virtual sensor approach for safe construction operations of trailing suction hopper dredger. Autom. Constr. 2021, 132, 103961. [Google Scholar] [CrossRef]
- Choi, Y.; Yoon, S. Autoencoder-driven fault detection and diagnosis in building automation systems: Residual-based and latent space-based approaches. Build. Environ. 2021, 203, 108066. [Google Scholar] [CrossRef]
- Yu, Y.; Yoon, S. Hidden factors and handling strategies on virtual in-situ sensor calibration in building energy systems: Prior information and cancellation effect. Appl. Energy 2018, 212, 1069–1082. [Google Scholar] [CrossRef]
- Yu, Y.; Yoon, S. Hidden factors and handling strategy for accuracy of virtual in-situ sensor calibration in building energy systems: Sensitivity effect and reviving calibration. Energy Build. 2018, 170, 217–228. [Google Scholar] [CrossRef]
- Yoon, S.; Yu, Y. Strategies for virtual in-situ sensor calibration in building energy systems. Energy Build. 2018, 172, 22–34. [Google Scholar] [CrossRef]
- Wang, P.; Han, K.; Liang, R.; MA, L.; Yoon, S. The virtual in-situ calibration of various physical sensors in air handling units. Sci. Technol. Built Environ. 2021, 27, 691–713. [Google Scholar] [CrossRef]
- Liu, Z.; Huang, Z.; Wang, J.; Yue, C.; Yoon, S. A novel fault diagnosis and self-calibration method for air-handling units using Bayesian Inference and virtual sensing. Energy Build. 2021, 250, 111293. [Google Scholar] [CrossRef]
- Wang, P.; Li, J.; Yoon, S.; Zhao, T.; Yu, Y. The detection and correction of various faulty sensors in a photovoltaic thermal heat pump system. Appl. Therm. Eng. 2020, 175, 115347. [Google Scholar] [CrossRef]
- Dixon, P.; Ellison, A.M. Bayesian inference: Introduction. Ecol. Appl. 1996, 6, 1034–1035. [Google Scholar] [CrossRef]
- Aksu, G.; Güzeller, C.O.; Eser, M.T. The Effect of the Normalization Method Used in Different Sample Sizes on the Success of Artificial Neural Network Model. Int. J. Assess. Tools Educ. 2019, 6, 170–192. [Google Scholar] [CrossRef] [Green Version]
- Metropolis, N.; Rosenbluth, A.W.; Rosenbluth, M.N.; Teller, A.H.; Teller, E. Equation of state calculations by fast computing machines. J. Chem. Phys. 1953, 21, 1087–1092. [Google Scholar] [CrossRef] [Green Version]
- Hastings, W.K. Monte carlo sampling methods using Markov chains and their applications. Biometrika 1970, 57, 97–109. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit | Number | Design Parameters | Values |
|---|---|---|---|
| Storage thermal tank | 1 | Heat storage tank capacity | 1600 USRT |
| Heat storage tank water level | 3100 mm | ||
| Heat storage tank volume | |||
| Heat pump | 8 | Compressor type | Scroll |
| Rated heating rated capacity | 145.8 kW | ||
| Heating power consumption | 38.8 kW | ||
| Heat exchanger | 2 | Rated heating capacity | 476.5 Mcal/h |
| Types | Periods |
|---|---|
| Development period of the virtual sensor | 12/01/2020–12/31/2020 (31 days) |
| Calibration period of VIC | 01/15/2021–01/31/2021 (17 days) |
| Operation period after calibration (validation) | 02/01/2021–02/28/2021 (28 days) |
| Category | Settings |
|---|---|
| Training data ratio | 70% |
| Validation data ratio | 15% |
| Testing data ratio | 15% |
| Data preprocessing | Min–max normalization |
| Training approach | Artificial neural network (ANN) |
| Neurons in ANN | 3-10-1 (input-hidden-output layers) |
| Input variables | , , and |
| Cases | Correction Functions | Correction Coefficients | Priors | Posteriors | Acceptance Rates | ||
|---|---|---|---|---|---|---|---|
| Mean | Standard Deviation | Mean | Standard Deviation | ||||
| Case 1 | 0.37 | 0.47 | −0.37 | 0.15 | 10.43% | ||
| Case 2 | 0 | 0.50 | −0.99 | 0.25 | 12.97% | ||
| 0 | 0.50 | −0.11 | 0.23 | ||||
| 0 | 0.50 | −0.08 | 0.06 | ||||
| Case 3 | 0 | 0.50 | −0.11 | 0.11 | 10.60% | ||
| 0 | 0.50 | 1.24 | 0.40 | ||||
| 0 | 0.50 | 0.36 | 0.26 | ||||
| 0 | 0.50 | 1.61 | 0.48 | ||||
| 0 | 0.50 | 1.15 | 0.34 | ||||
| 0 | 0.50 | −1.22 | 0.26 | ||||
| 0 | 0.50 | −2.75 | 0.52 | ||||
| 0 | 0.50 | 0.84 | 0.46 | ||||
| 0 | 0.50 | −1.10 | 0.44 | ||||
| 0 | 0.50 | −0.73 | 0.44 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koo, J.; Yoon, S.; Kim, J. Virtual In Situ Calibration for Operational Backup Virtual Sensors in Building Energy Systems. Energies 2022, 15, 1394. https://doi.org/10.3390/en15041394
Koo J, Yoon S, Kim J. Virtual In Situ Calibration for Operational Backup Virtual Sensors in Building Energy Systems. Energies. 2022; 15(4):1394. https://doi.org/10.3390/en15041394
Chicago/Turabian StyleKoo, Jabeom, Sungmin Yoon, and Joowook Kim. 2022. "Virtual In Situ Calibration for Operational Backup Virtual Sensors in Building Energy Systems" Energies 15, no. 4: 1394. https://doi.org/10.3390/en15041394
APA StyleKoo, J., Yoon, S., & Kim, J. (2022). Virtual In Situ Calibration for Operational Backup Virtual Sensors in Building Energy Systems. Energies, 15(4), 1394. https://doi.org/10.3390/en15041394