5.3. New Designed Platform
The platform was designed based on OC4 semi-submersible platform shape information. In order to apply the same size and material usage as the reference shape OC4 platform, the design was considered such that the distance from the shape center to the column center of the newly designed platform was 28.87 m, and the material amount was not made to exceed 5% at 3,821,142 kg in order to apply the same material amount as the reference shape.
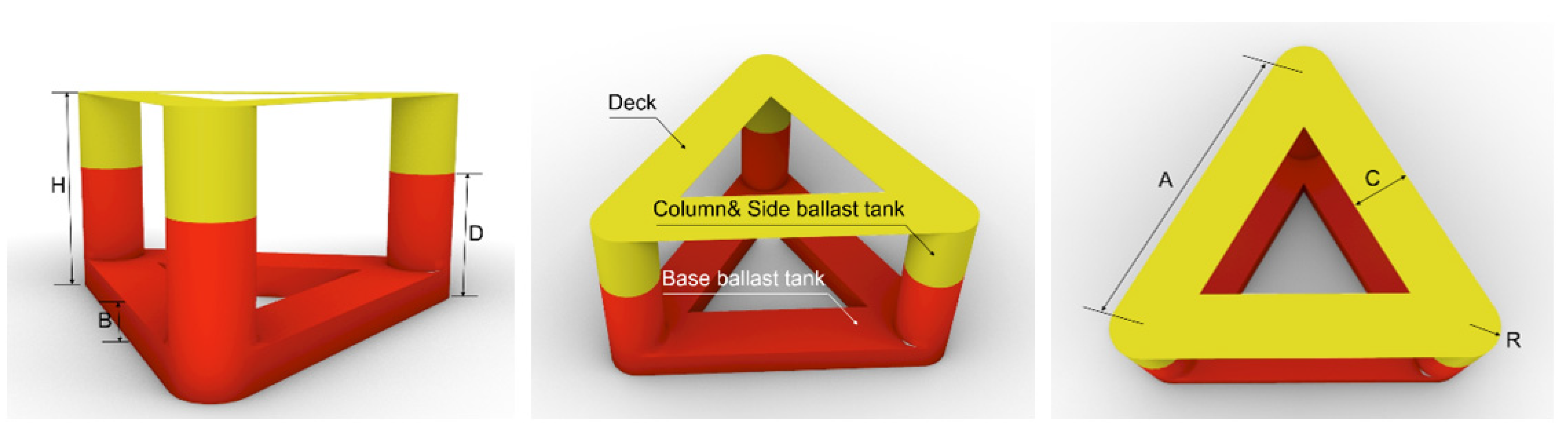
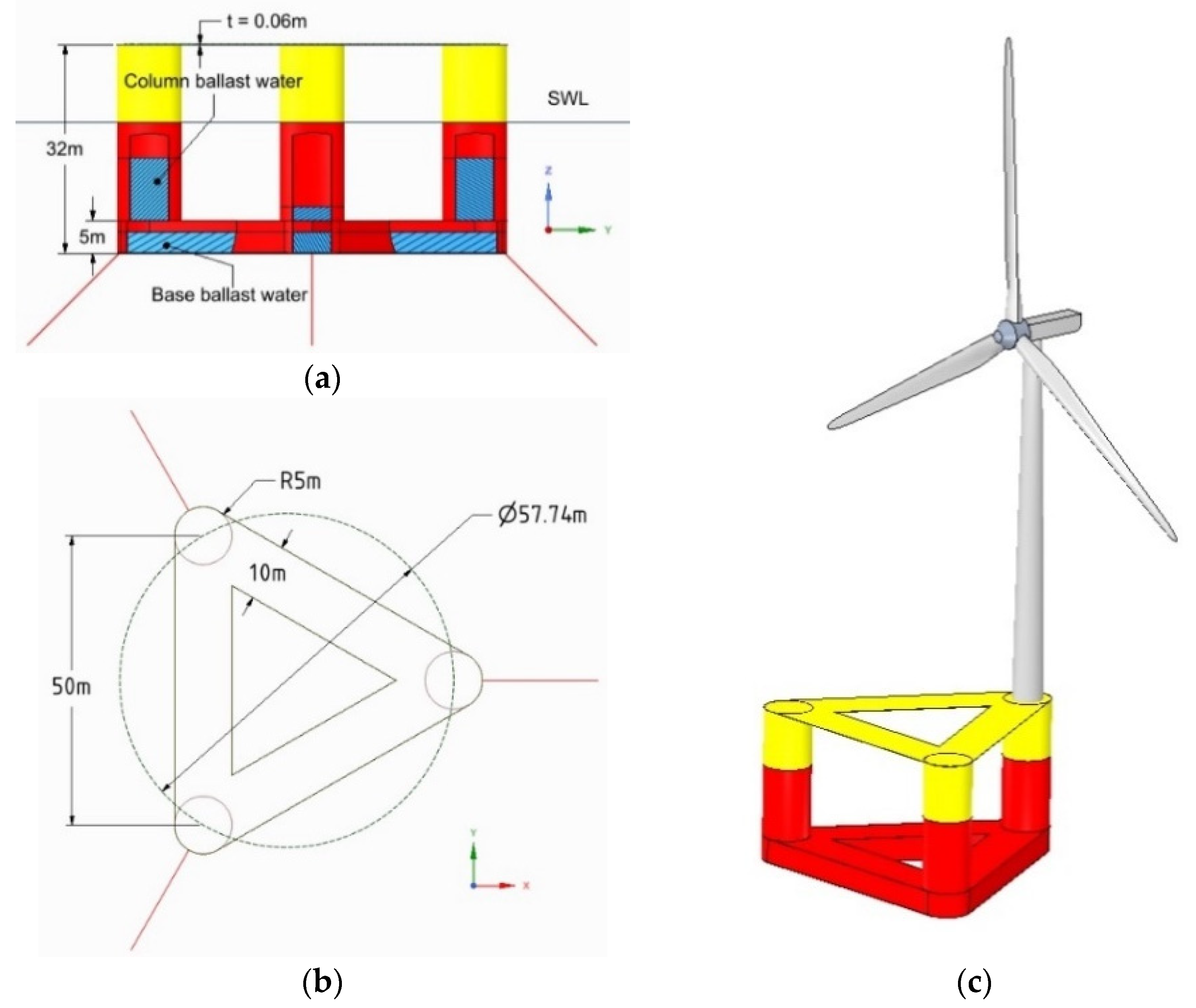
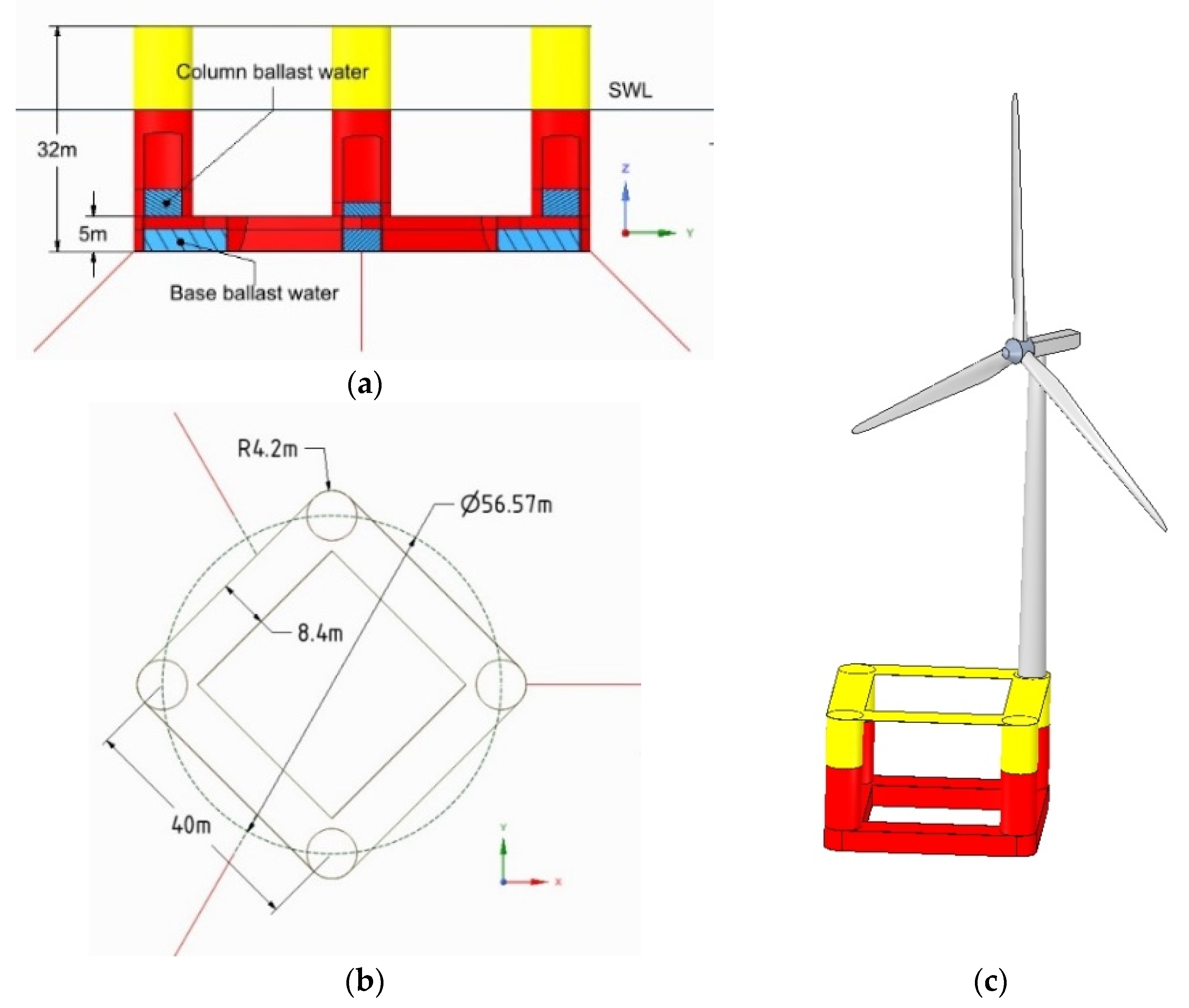
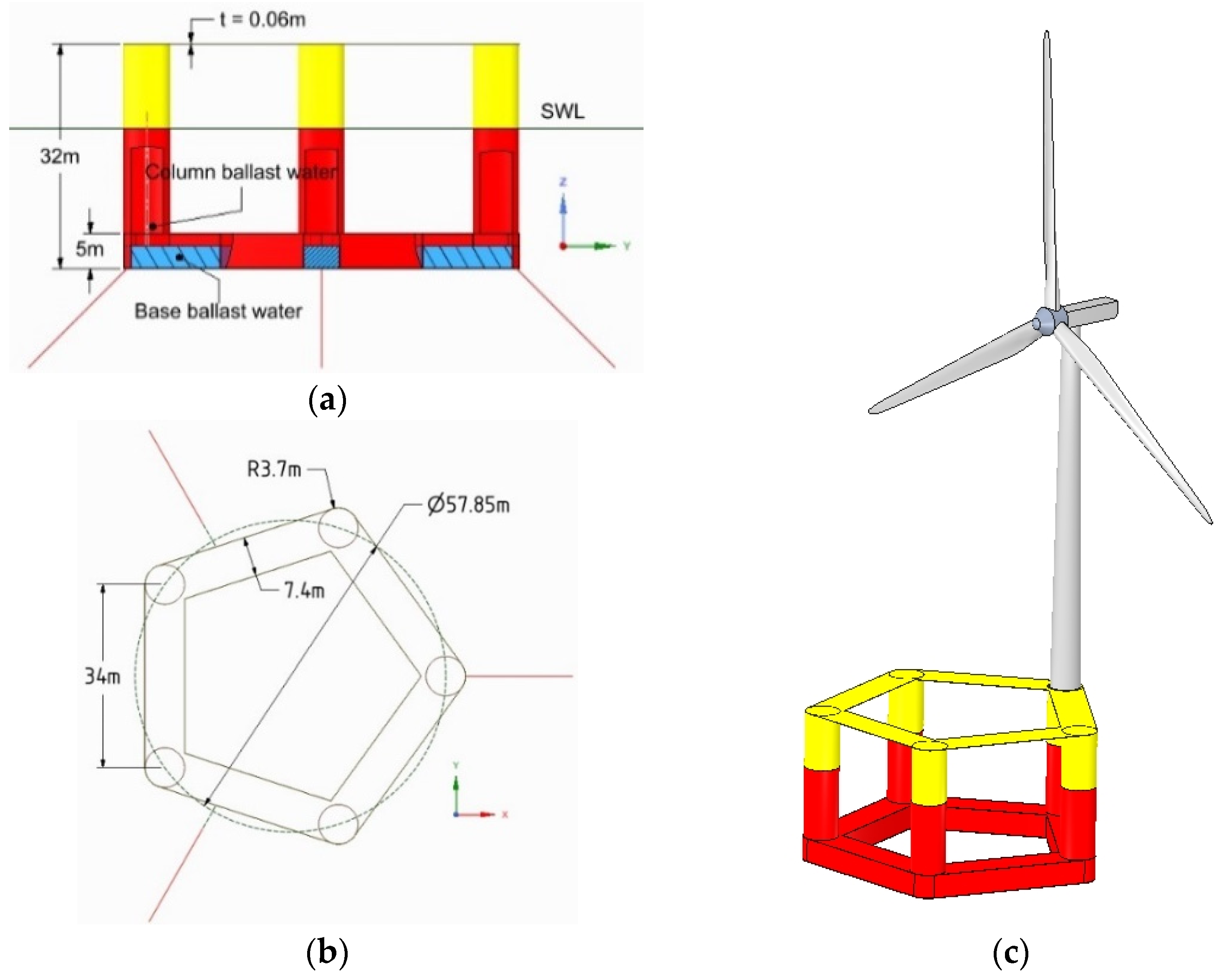
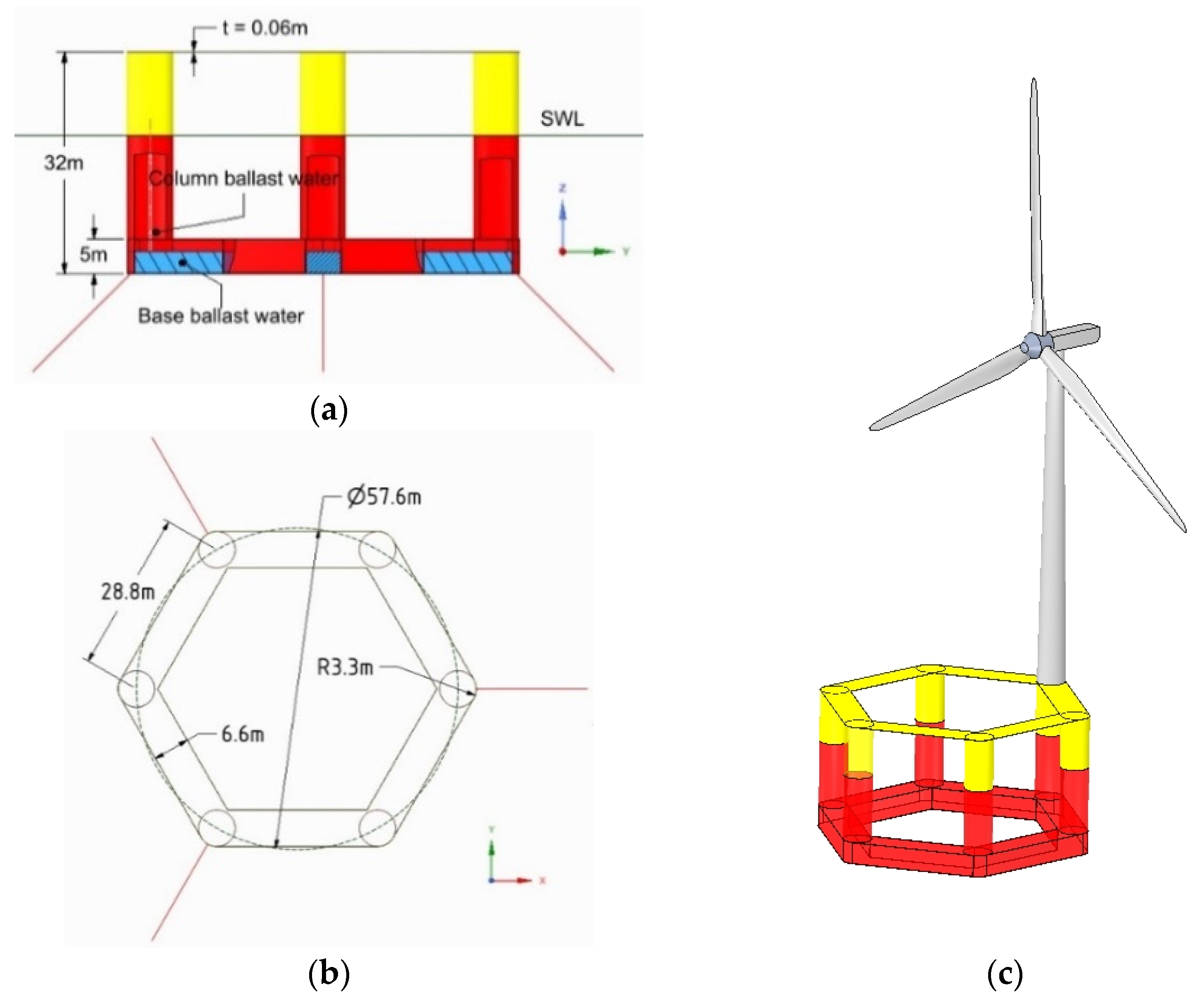
The existing OC4 semi-submersible platform was designed by adding a small column in the platform center to install towers and RNA, and each column was connected using pontoons. The newly designed platform in this study removed the center column that existed on the reference platform. The reason for this was to simplify the design and compensate for a problem which makes it difficult to install towers and turbines at the center of the platform when the distance from the center to the edge of the platform increases. Structural safety was secured by connecting the lower part of the column to a ballast tank and the upper part to a deck. Ballast water containers can be seen at the lower part of the platform and the column; the base ballast water tank and column ballast water tanks are separated by caps. The use of ballast water to separate the columns was designed to fill the ballast water such that the center of gravity of the platform could be tailored to the design. The thickness of the outer wall constituting the platform was set to 0.06 m, the same as in the reference model, and the upper deck thickness was set at the same value.
Figure 8 shows a platform with three columns as an example along with the names of the parts of the platform and the parameters considered in the design. The base ballast tank was set to 5 m in consideration of the amount of material used in platform manufacturing while allowing enough ballast water to be filled. The width of the deck was designed similar to that of the diameter of the column such that the width of the deck was changed as the diameter of the column changed. As the purpose of this study was to compare and analyze the stability according to the number of columns with the amount of materials the same, the column radius was selected as a factor that inevitably had to be changed in order to maintain the same amount of materials used. Drift was set to 20 m, the same as the standard without the number of columns, and the height of the platform was set to 32 m; the location of the fairlead was set to 6m from the bottom of the platform, the same as the standard. Shape information for each platform is shown in
Table 4.
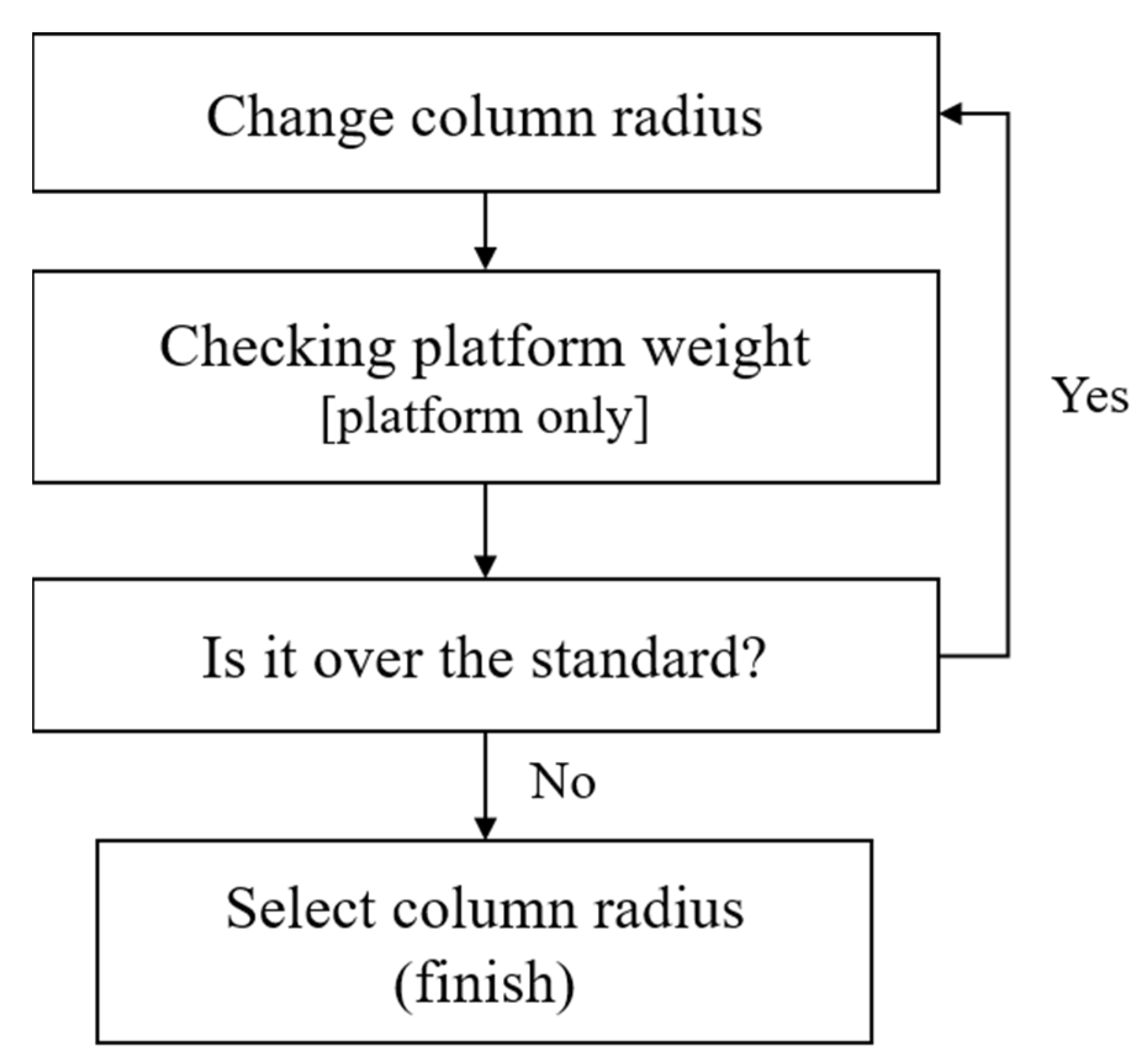
The column radius was selected based on the reference range of the amount of material compared with the reference platform design. The platform design presented in this paper was determined by selecting the radius of the column according to the procedure shown in
Figure 9.
However, when the column radius changes, the width of the base ballast tank and the width of the deck wall change as well. Therefore, it is not simple to design the shape considering the center of gravity and the amount of material. After changing the column radius, simple processes such as modeling the platform and checking whether the modeled platform falls within the reference weight range can take a considerable amount of time. Therefore, when designing a platform with a fixed cost and material amount, we divided the platform into several parts to allow the mass of the platform to be easily calculated. In this paper, the platform was divided into four parts and the mass of each part was calculated as shown in Equations (9)–(13). Referring to Equations (14)–(16), the column radius was defined as not less than the tower radius = 3.25 m. The platform mass was equal to the OC4 platform mass or less than 1.05 times the OC4 platform mass. Each platform designed using the equations is shown in
Figure 10,
Figure 11,
Figure 12 and
Figure 13.
used in Equations (9)–(13) applies the following constant values show in
Table 5 according to the type of platform.
The density of the material used for the platform was 7850 kg/m
3. The characteristics and the center of momentum derived using the Equations (9)–(16) are shown in
Table 6 for each platform. The center of mass shown in
Table 6 is defined based on the water surface and the weight of the tower rotor, nacelle, mooring, and ballast water. The ballast water mass is calculated in order the platform can be horizontal to the sea level when all parts (tower, rotor nacelle assembly, and mooring) are bonded to the platform. Once the ballast water is determined as follows, the inertial moment value required to derive the hydrodynamic data of the platform can be obtained; these values are shown in
Table 7,
Table 8,
Table 9 and
Table 10. The moment of inertia provided in these tables considers the tower, RNA, mooring, and ballast water.
5.4. Diffraction Analysis
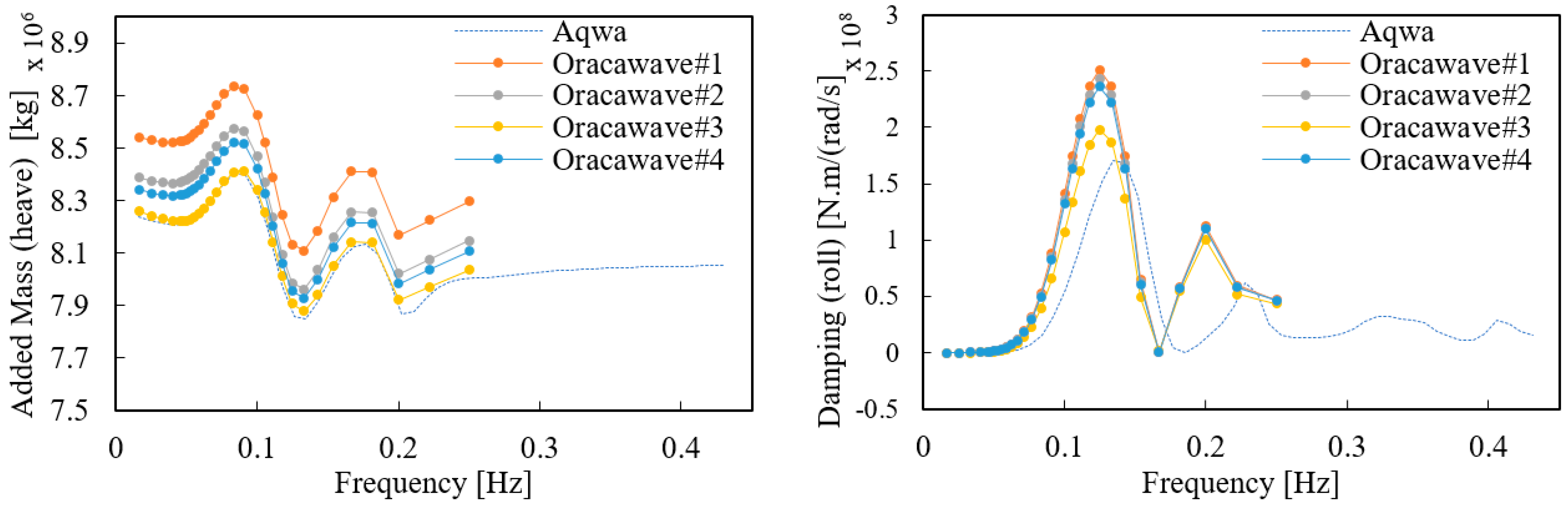
Hydrodynamic diffraction analyzes the platform characteristics for all directions and orientations, such as surge, sway, heave, roll, pitch, yaw, etc. Comparison of all calculated data by grid size is a more accurate method of selecting platform properties data. However, comparison of all data is an inefficient method; here, we mainly performed comparisons for roll and pitch, which are generally considered important in platform behavior. In this paper, only two graphs for each platform are shown, one for the added mass and the other for the damping characteristics, as these show the most remarkable differences in results depending on the grid size.
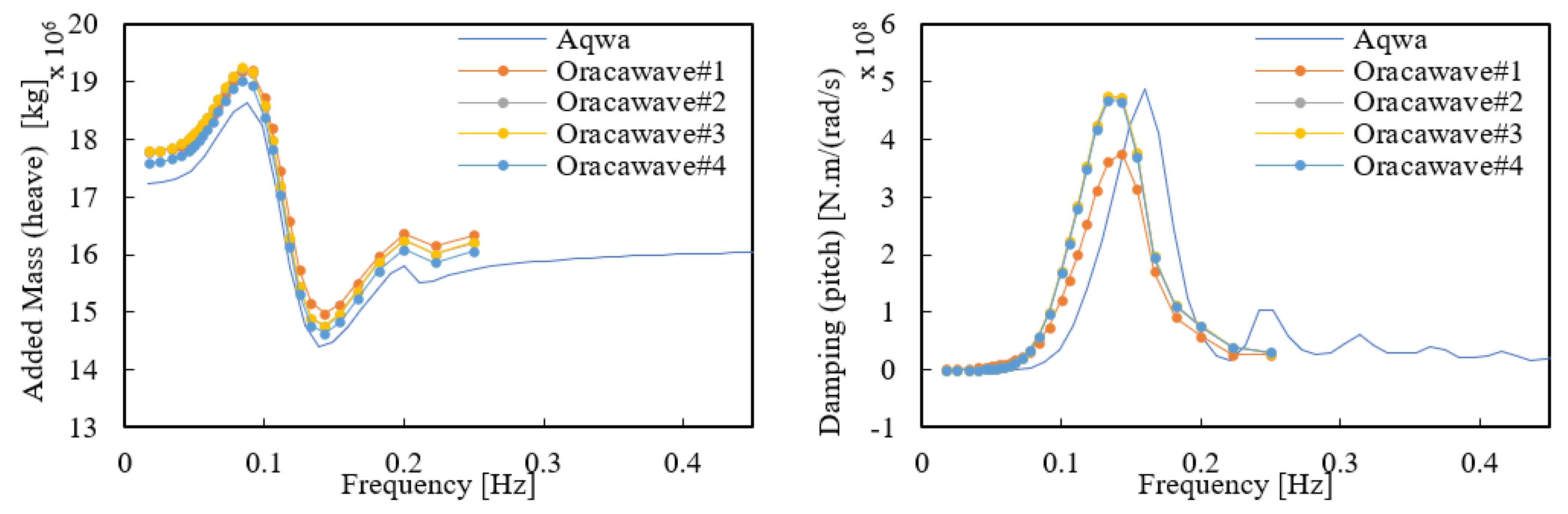
As for the grid size, the platform was constructed with a finer grid as the number went up from #1 to #4. In the case of AQWA, because there was negligible difference in the diffraction result values for each grid size, only one grid result was used in this paper. In the case of three columns as
Figure 14, the added mass value for the peak was predicted to be low overall according to the wave cycle using the rough mesh size. However, the added mass values for different mesh sizes were confirmed to match, having almost no difference. The added mass derived through AQWA, which was lower than Orcawave, was generally confirmed. In the case of damping, the damping value for pitch was low in Orcawave analysis with rough mesh, while the other mesh size showed no difference in value. AQWA was derived with damping values entirely off-set to the right, while peak values had mostly similar values to Orcaflex.
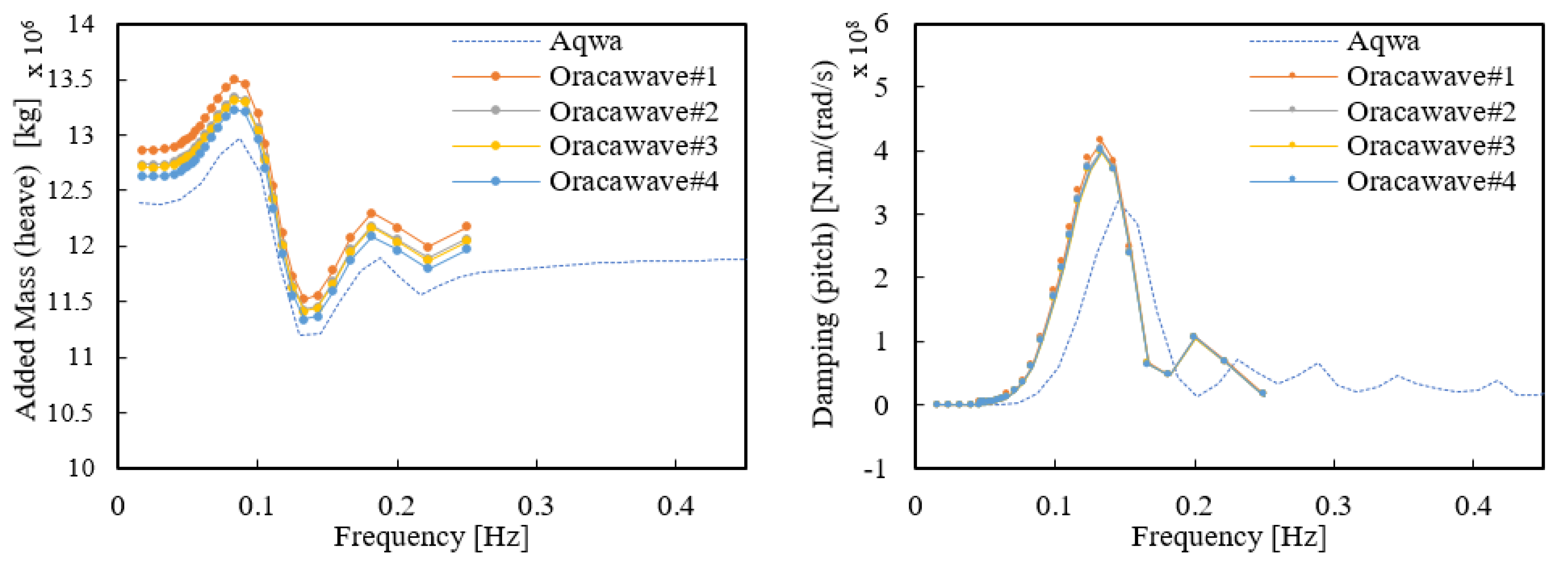
In the case with four columns as
Figure 15, as the number of grids increased every diffraction characteristic decreased according to wave frequency in the diffraction analysis performed using Orcawave. The added mass value derived through AQWA was found to be slightly lower than the Orcawave result for the largest number of grids. In the case of damping, there was no significant difference with the Orcawave results value according to the mesh size; however, the AQWA results for the pitch damping value were found to have an offset similar to the case with three columns, and in the case of peak value it was lower than Orcawave.
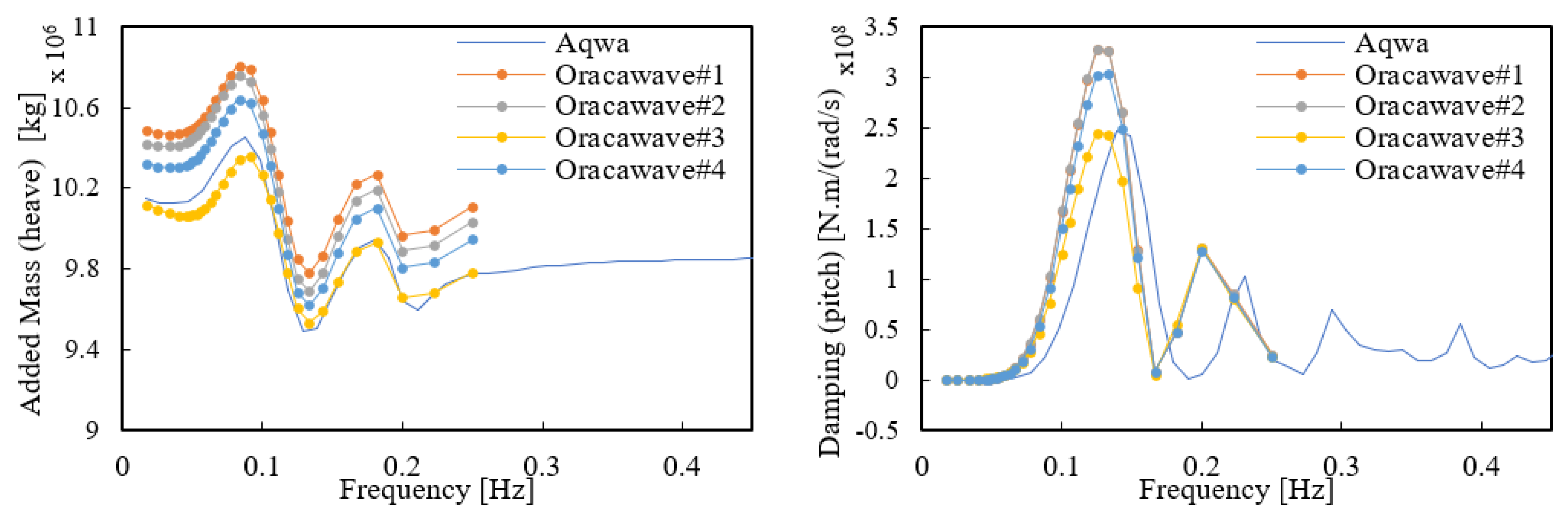
In the case of five columns as
Figure 16, the added mass value for heave did not show a trend of convergence when the number of grids was increased similar to previous platforms. As the number of grids increased, the added mass value decreased overall, although the trend was not confirmed in #4 and most of the value was higher than in #3. The tendency to grid convergence was confirmed up to Orcawave #3, and when comparing the added mass value for heave it can be seen that the results for Orcawave #3 and the AQWA result value were quite similar. In the case of damping, there was little difference in value of #1 and #2, while the peak value was relatively lower than #3 and higher than #4. Although the peak value in #3 had an offset result, it can be confirmed that after calculation it was found to be significantly similar to the peak value derived from AQWA.
In the case with six columns as
Figure 17, similar to the five column platform the added mass value for the wave cycle seemed to decrease overall as the number of grids increased; however, the trend was not confirmed in #4 and the overall value was higher than in #3. The trend toward grid convergence was confirmed up to Orcawave #3, and it can be seen that the added mass value for the peak was similar to the AQWA result. Similarly, when compared with the previous result in #3 the peak value was relatively low and then high again at #4. The peak value in #3 had offset results as a whole, although compared to other values it can be seen that it was relatively similar to the peak value derived from AQWA.
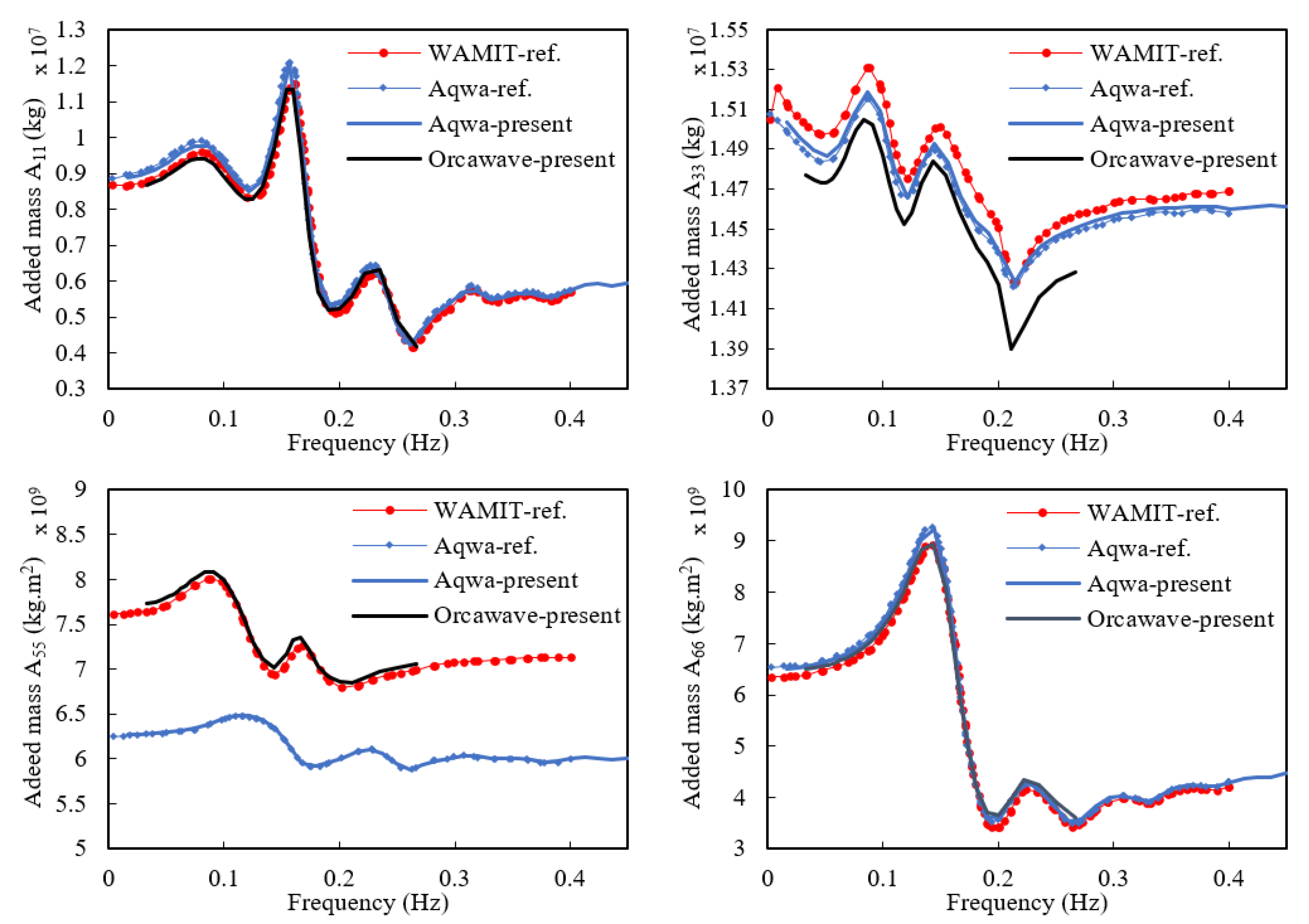
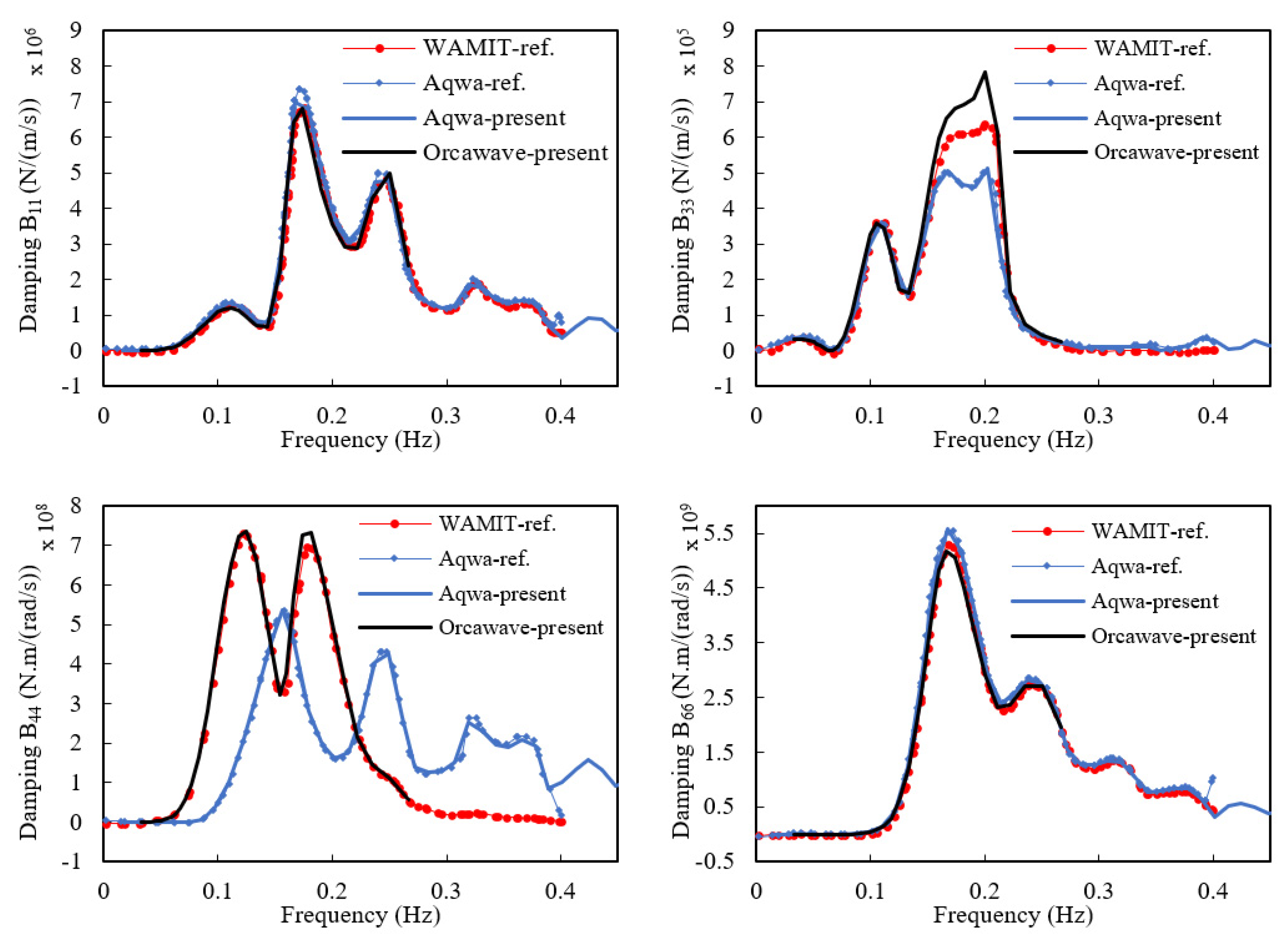
In the case of AQWA, the diffraction analysis results for heave, pitch, and roll are somewhat different from Orcawave due to differences in analysis techniques; the diffraction results obtained from Orcawave and WAMIT for OC4 platforms are discussed in the previous chapter, and their offset characteristics with AQWA here show similar behavior.
Only one result was used in AQWA because the lattice sensitivity depending on the platform shape was not large. In Orcawave, however, there was a case where the lattice sensitivity was largely dependent on the platform shape. Therefore, for platform diffraction the converged Orcawave result was used as platform characteristic data for platforms with lower grid sensitivity as the number of grids increased, while for platforms with high grid sensitivity the AQWA result was used as platform characteristic data.
5.5. Fully Coupled Simulation
Figure 18,
Figure 19 and
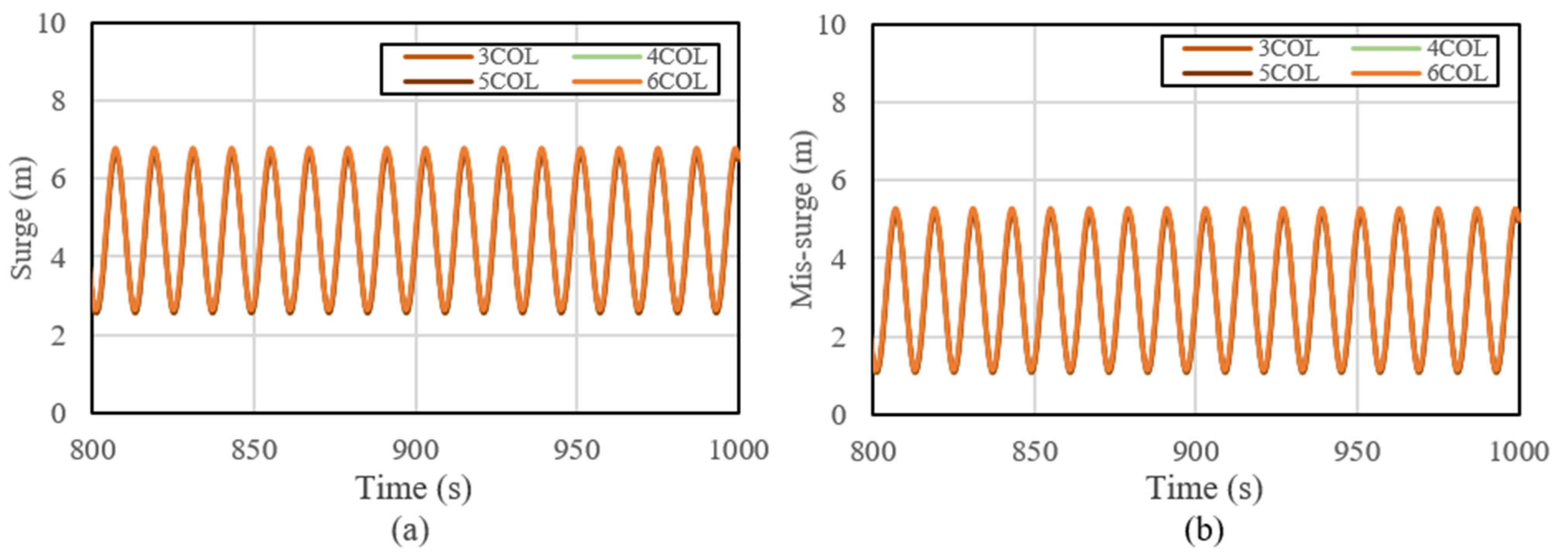
Figure 20 show the fully-coupled simulation results under the most critical environmental conditions.
Figure 18a,
Figure 19a and
Figure 20a show the platform motion results simulated under a regular wave with a wave height of 7.4 m, wave period of 12 s, wind speed of 23.1 m/s, and the direction of waves and wind aligned.
Figure 18b,
Figure 19b and
Figure 20b show the platform motion results simulated under a regular wave with a wave height of 7.4 m, wave period of 12 s, wind speed of 20 m/s, and the direction of waves and wind misaligned.
Figure 18 shows the surge motion results for four different types of platforms. From this figure, it can be seen that the different types of platform had almost the same surge motion under both aligned and misaligned environment conditions.
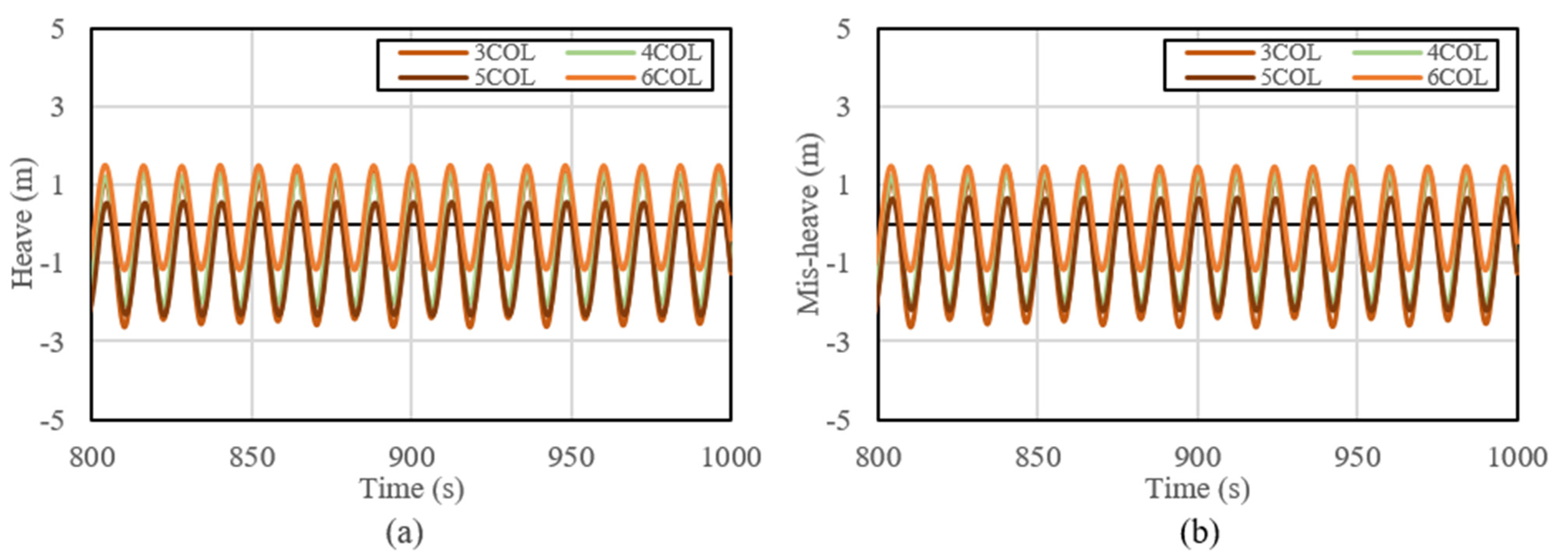
Figure 19 shows the heave motion results. In the case of heave motion, a slightly different minimum and maximum were confirmed depending on the platform type. The three-column platform’s maximum heave value was 1.3 m, and the minimum heave value was −2.6 m. The four-column platform’s maximum heave was 1.3 m, and the minimum heave value was −2.1m. The five-column platform’s maximum heave was 0.5 m, and the minimum heave value was −2.3. The six-column platform’s maximum heave was 1.5 m, and the minimum heave value was −1.2 m. Considering the average value, the six-column platform moved the least and the three-column platform moved the most. For amplitude, the six-column platform’s amplitude was the least at 2.7 m and the three-column platform’s amplitude was the highest at 4 m.
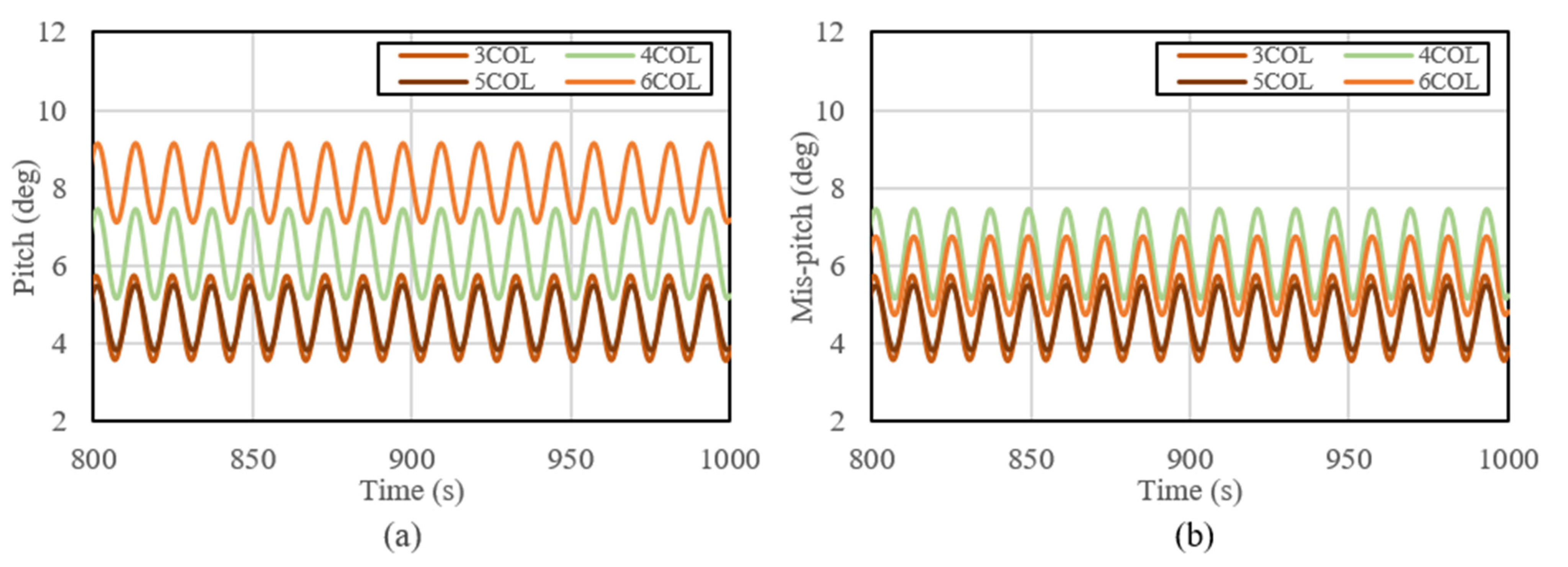
Figure 20 shows the platform pitch motion results. Contrary to the above two results, the motion was different between the aligned and misaligned environmental conditions. In aligned conditions all platforms’ pitch motion amplitude was almost the same, although the averages were different depending on the platforms. In the cases with three and five columns the platform was the most stable, while the six-column platform was the most unstable. In misaligned conditions, all platforms’ pitch motion was almost the same as in the aligned conditions, except for the six-column platform. In case of the six-column platform, the average was more stable compared to the four-column platform.
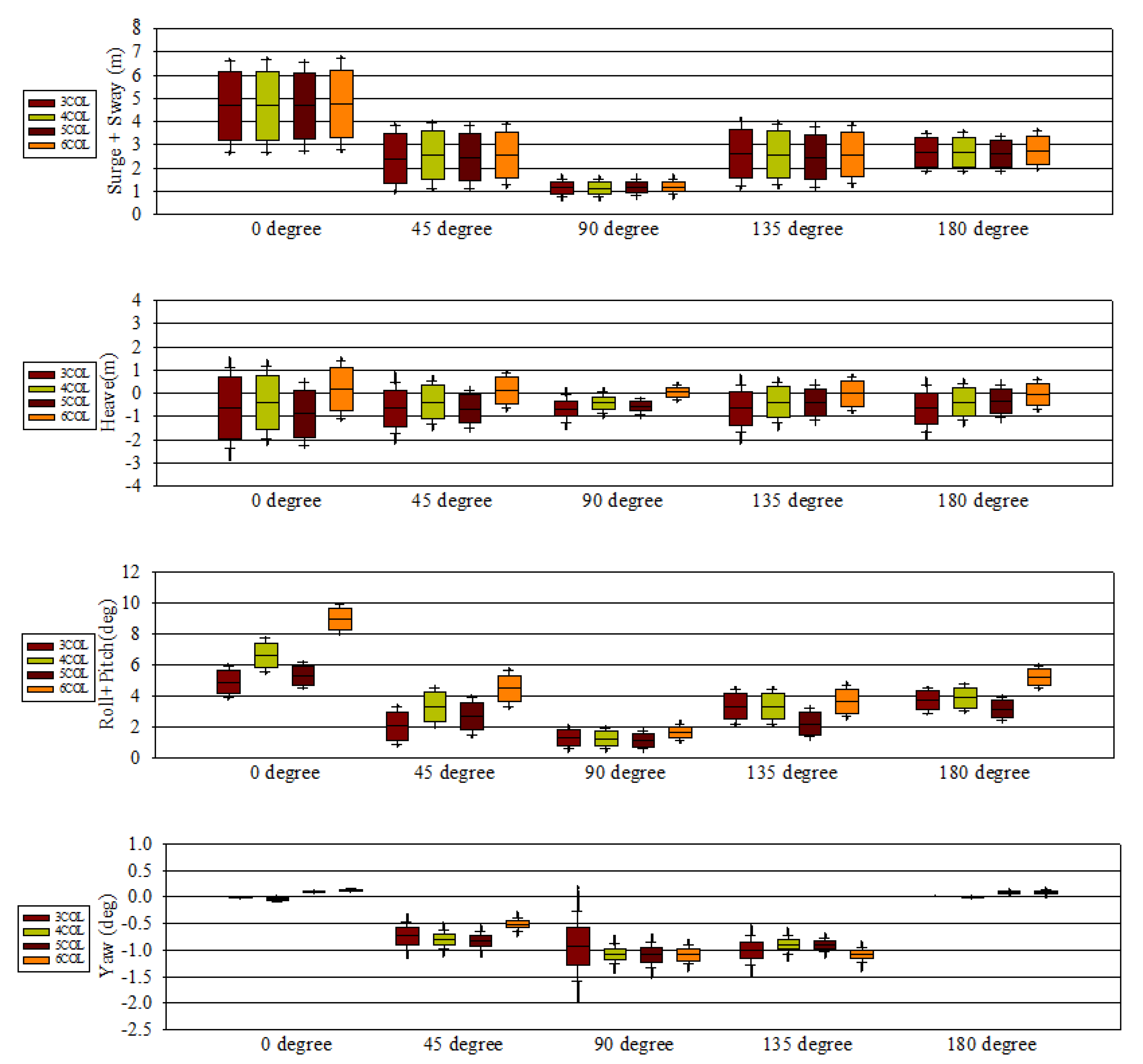
Figure 21 and
Figure 22 show the platform motion response conducted for five wind angles at 45-degree intervals from 0 degree to 180 degrees. Each graph identifies four types of values in total in order to analyze the stability of the platform, namely, surge + sway, heave, roll + pitch, and yaw. In addition, for a more intuitive analysis the results for each angle for all platform shapes are provided. The reason for the analysis of surge and sway is that wind and waves from different angles affect the platform differently. In order to analyze the displacement value for each angle, the surge and sway values were added as absolute values. In the case of heave, the absolute value was not taken into account, roll + pitch applied the same method as surge + sway, and yaw applied the same method as heave. The analysis was largely classified into two categories. One was an alignment in which the directions of waves and wind coincide, and the other a misalignment in which the directions of waves and wind do not coincide.
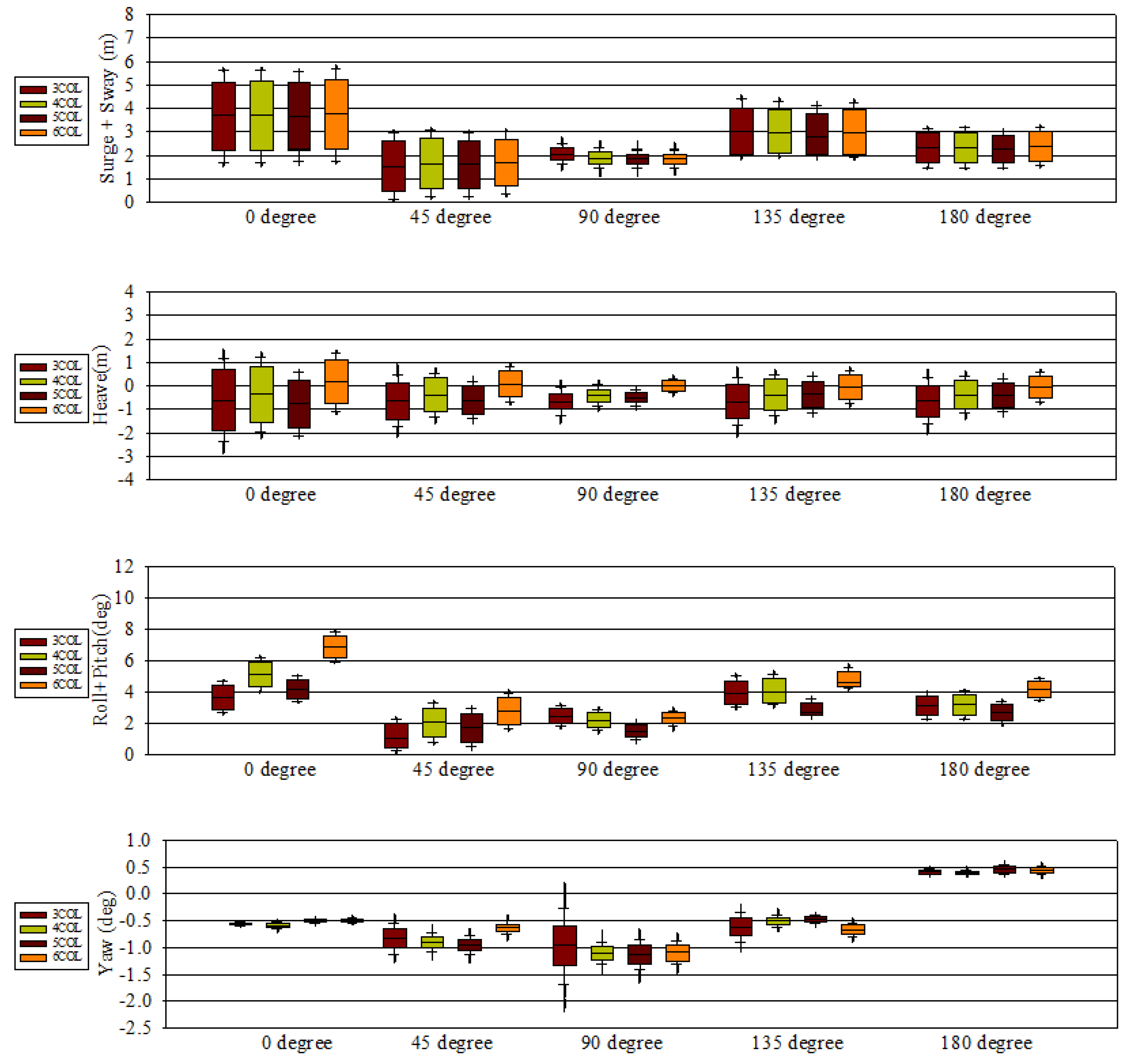
Figure 22 shows the analysis of the environment in which the wind direction and the wave direction coincide, while
Figure 21 shows the analysis of the environmental conditions in which the difference between wind and wave direction is 22.5 degree. In
Figure 22, the wind direction is the same as in
Figure 21; the analysis was conducted under extreme environmental conditions in which waves were generated by twisting 22.5 degree clockwise on an early basis. These results can be explained by the order of alignment and misalignment.
For surge + heave, there was no overall difference in platform shape and the largest range of behavior was found in all platforms from 0 degrees to about 2.5 m to 6.5 m, followed by a similar range and average values at 45 degrees and 135 degrees; the average value was similar, and the range of behavior was more stable. The smallest range of behavior was 90 degrees, the absolute sum of surge + sway was about 1 degree on all platforms, and the maximum and minimum range of behavior was confirmed to be within 1 degree.
In the case of heave, the overall average value was confirmed to be 0 to −1 m, and the largest movement was confirmed at 0 degree same as surge + sway. Comparing by platform, it was confirmed that at 0 degrees the six-column platform had the closest average value to 0 and the range of behavior was stable. In other wind and wave angles, the average value of the six-column platform was closest to 0, and its behavior was confirmed to be more stable compared to the other platforms.
In the case of roll + pitch, the behavior range of the six-column platform was similar to or less than that of other platforms, although the average slope was the largest. In particular, the average slope was 9 degrees from 0 degrees, 3–4 degrees larger than the average slope of other platforms. Regardless of the platform, the roll + pitch angle was the largest at 0 degrees, of which the three-column platform and the five-column platform had a similar average slope and the five-column platform was more stable considering the maximum and minimum values. The case with five columns was stable compared to other platforms at different wind and wave angles.
In the case of yaw, as compared to other behaviors small behaviors appeared between −2 degrees and 1 degree in all directions. However, while other behaviors showed a stable appearance at 90 degrees the most unstable yaw behavior was confirmed at 90 degrees. In particular, the case with three columns showed the most unstable behavior of all the platforms, and in other platforms similar movements were confirmed with the same wave and wind direction.
When analyzing the misalignment conditions, in the case of surge + sway the most unstable movement was confirmed at 0 degrees regardless of the shape of the platform; no significant difference in stability was confirmed for any platform. In the case of heave, the most unstable movement was confirmed at 0 degrees. In terms of stability, the case with six columns showed good movement with all wind and wave direction, and the average value was close to 0.
The most unstable behavior was confirmed at 0 degrees in the case of roll + pitch, and the average slope was found to be the most unstable at about 7 degrees, especially in the case with six columns. Overall, there was no significant difference in the range of platform behavior by platform, and stable behavior was shown with the overall wind and wave angles in the case with three columns.
In the case of yaw it was confirmed that the overall behavior of the three-column platform was the most unstable, especially at 90 degrees. On the other hand, it was confirmed that the behavior ranges of the platforms with four, five, and six columns were stable.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}