
An Improved Sliding Mode Control with Integral Surface for a Modular Multilevel Power Converter



Abstract
:1. Introduction
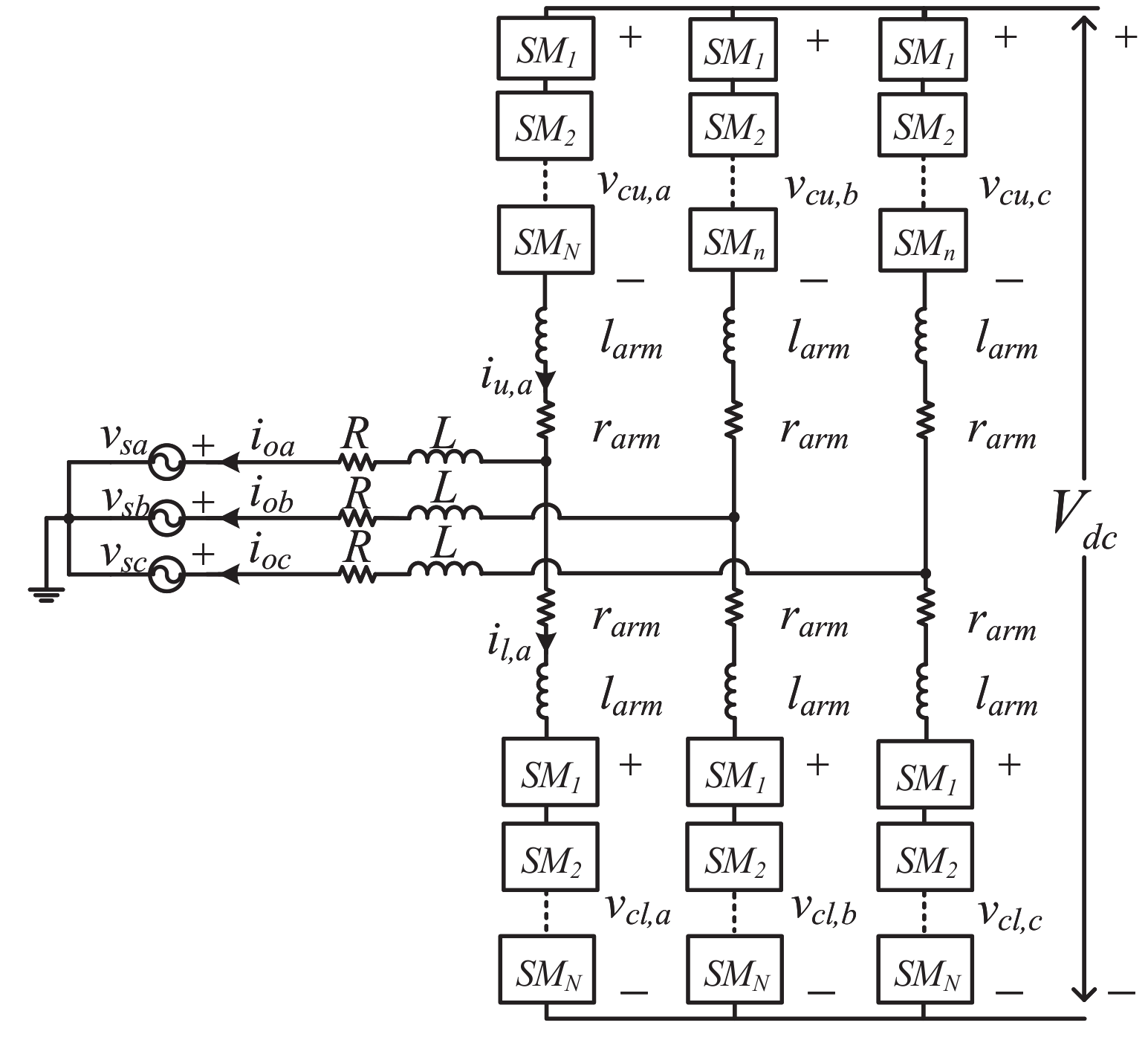
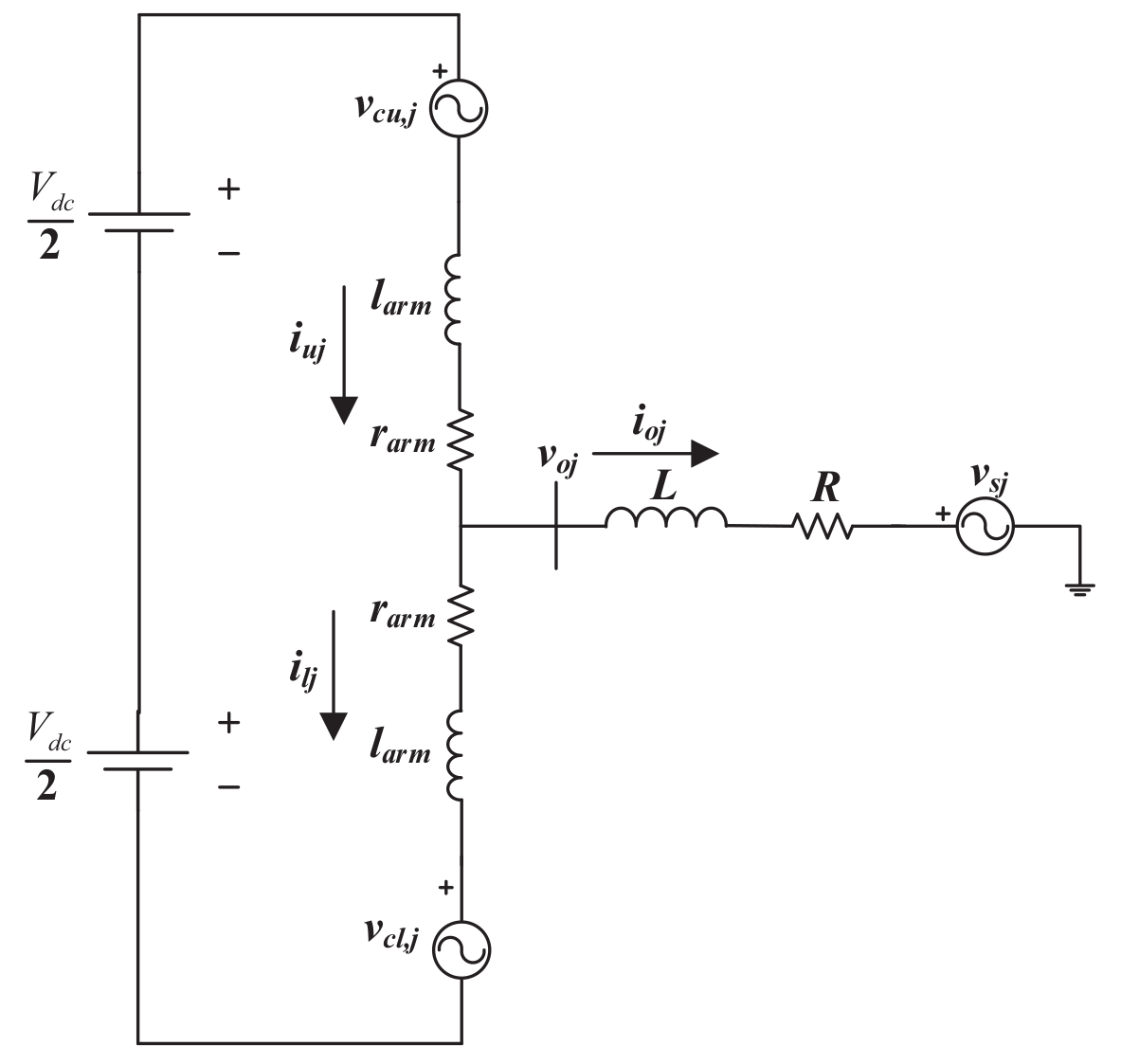
2. Modular Multilevel Converter Modeling
2.1. Modular Multilevel Converter Modeling
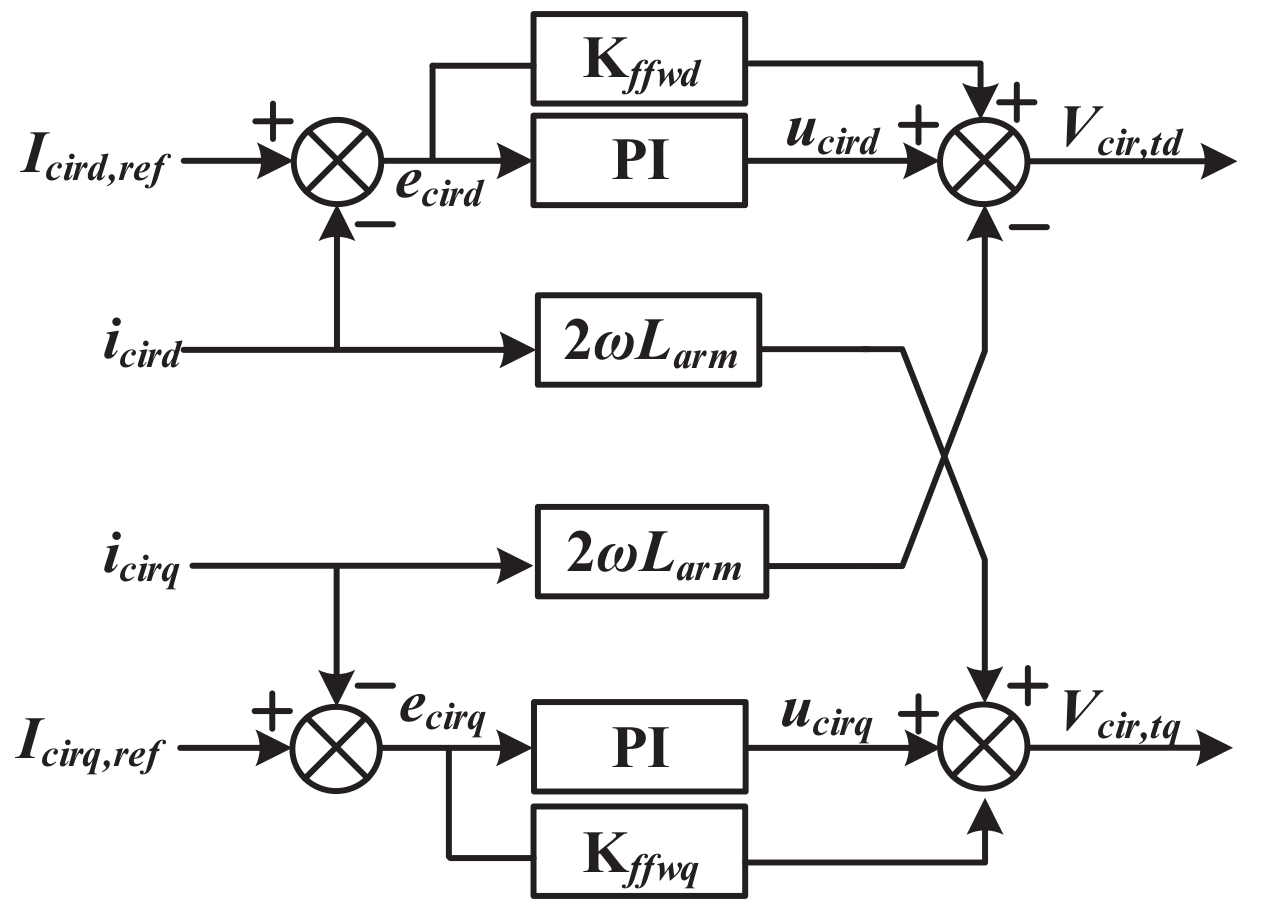
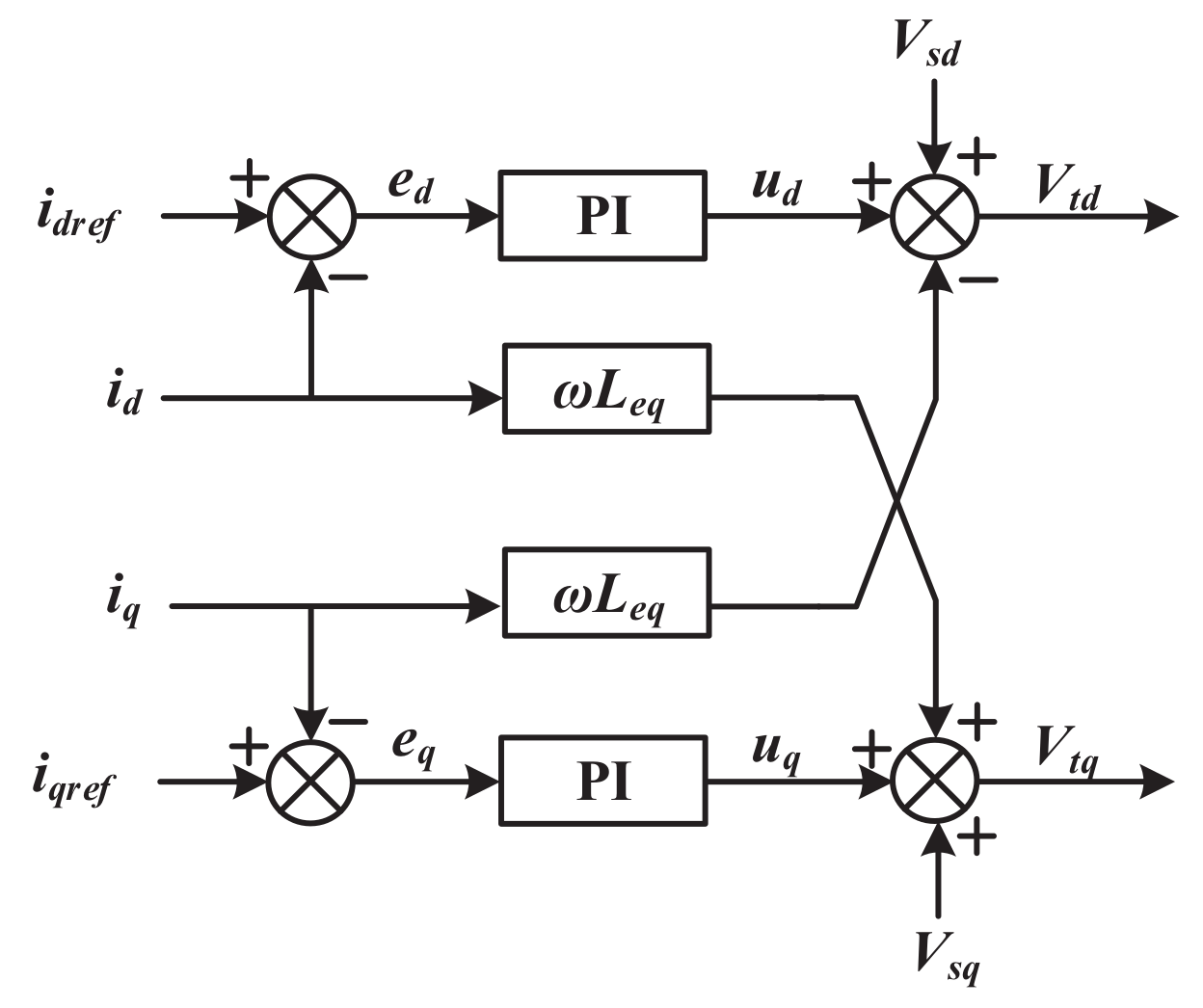
2.2. Modular Multilevel Converter Control System
2.2.1. PI Controller
2.2.2. Sliding Mode Control
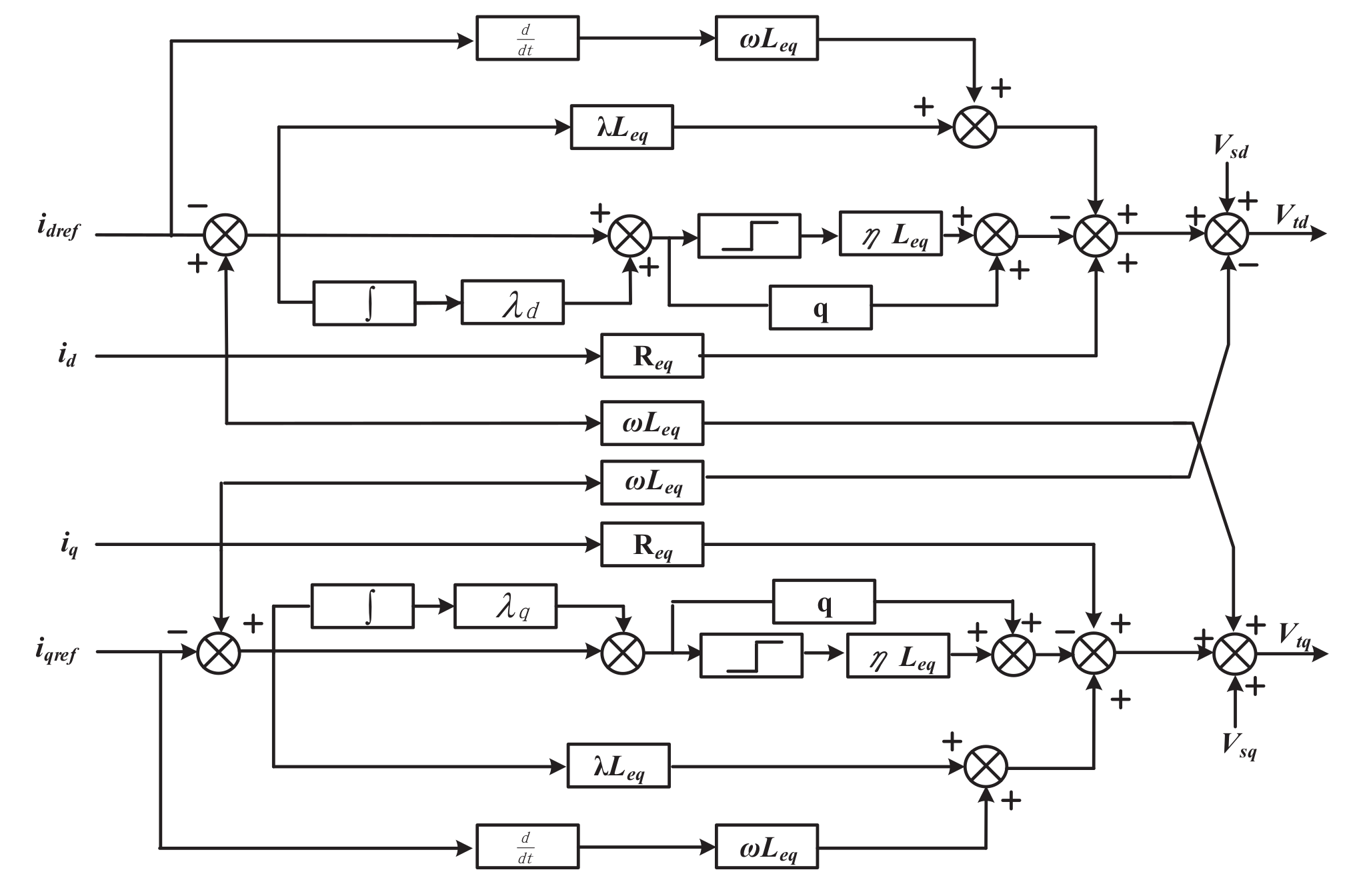
2.2.3. Proposed Method
3. Offline Simulation and Experimental Validations
3.1. Simulation Results
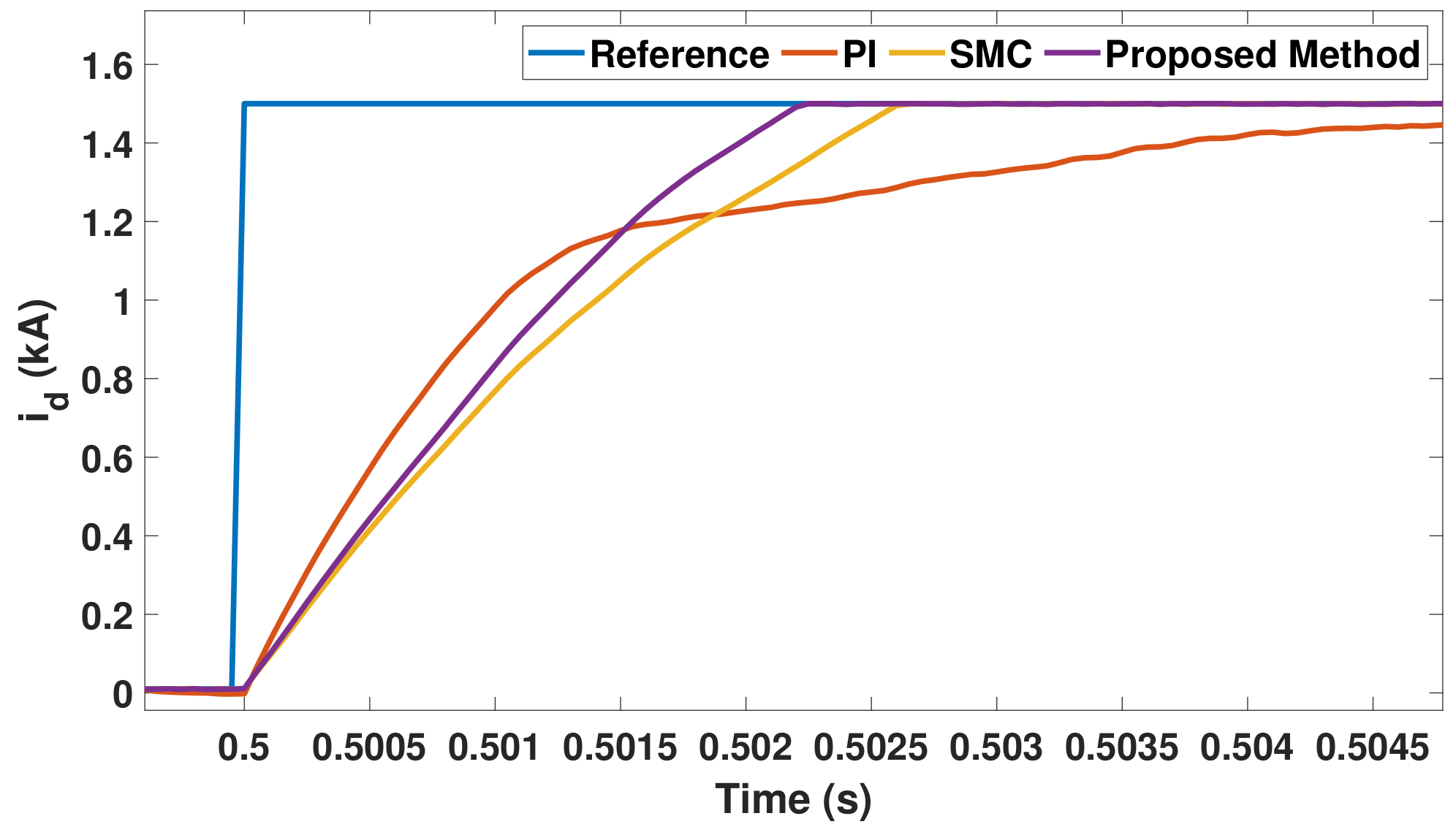
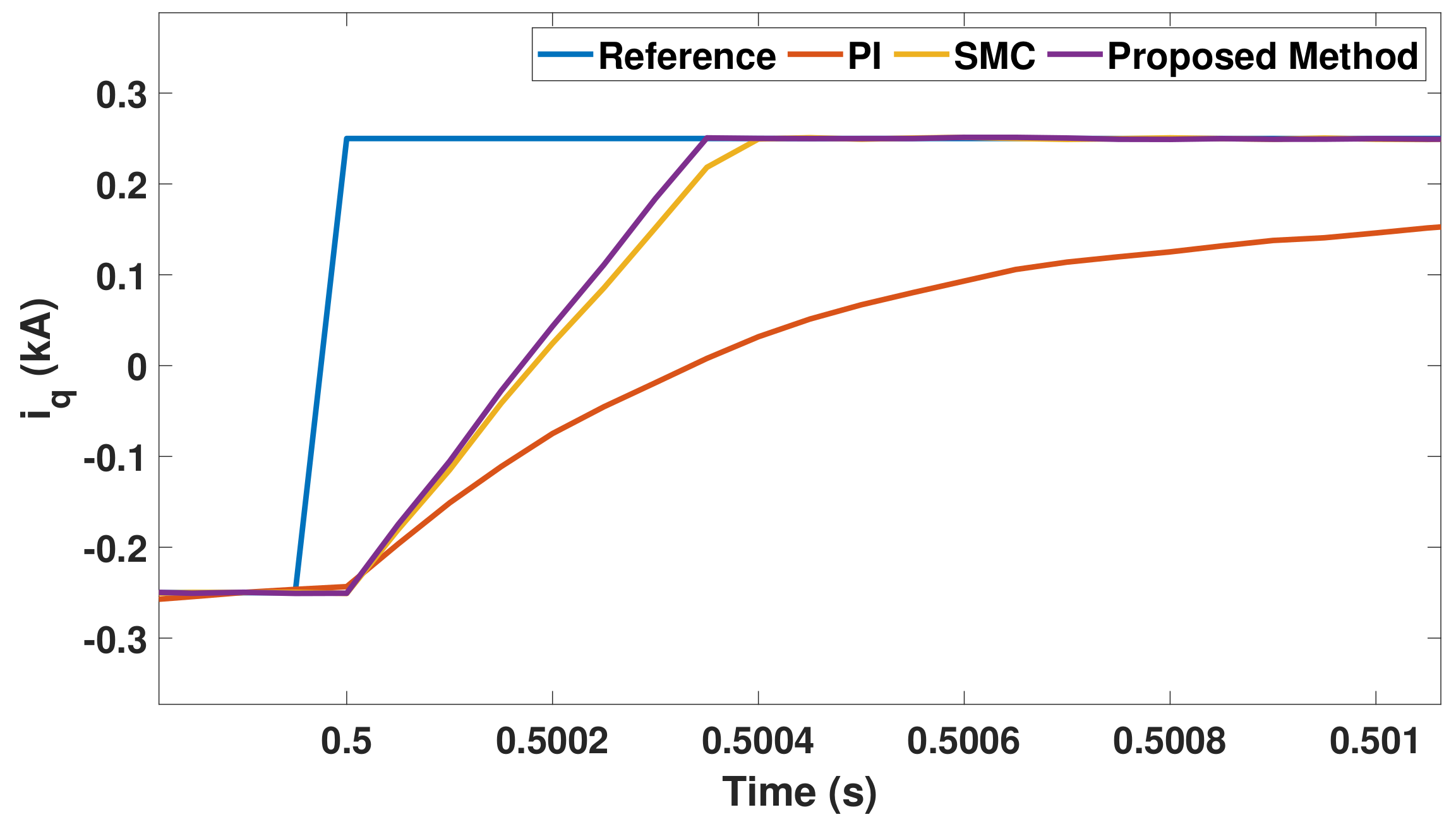
3.1.1. Case 1 Active and Reactive Currents Tracking
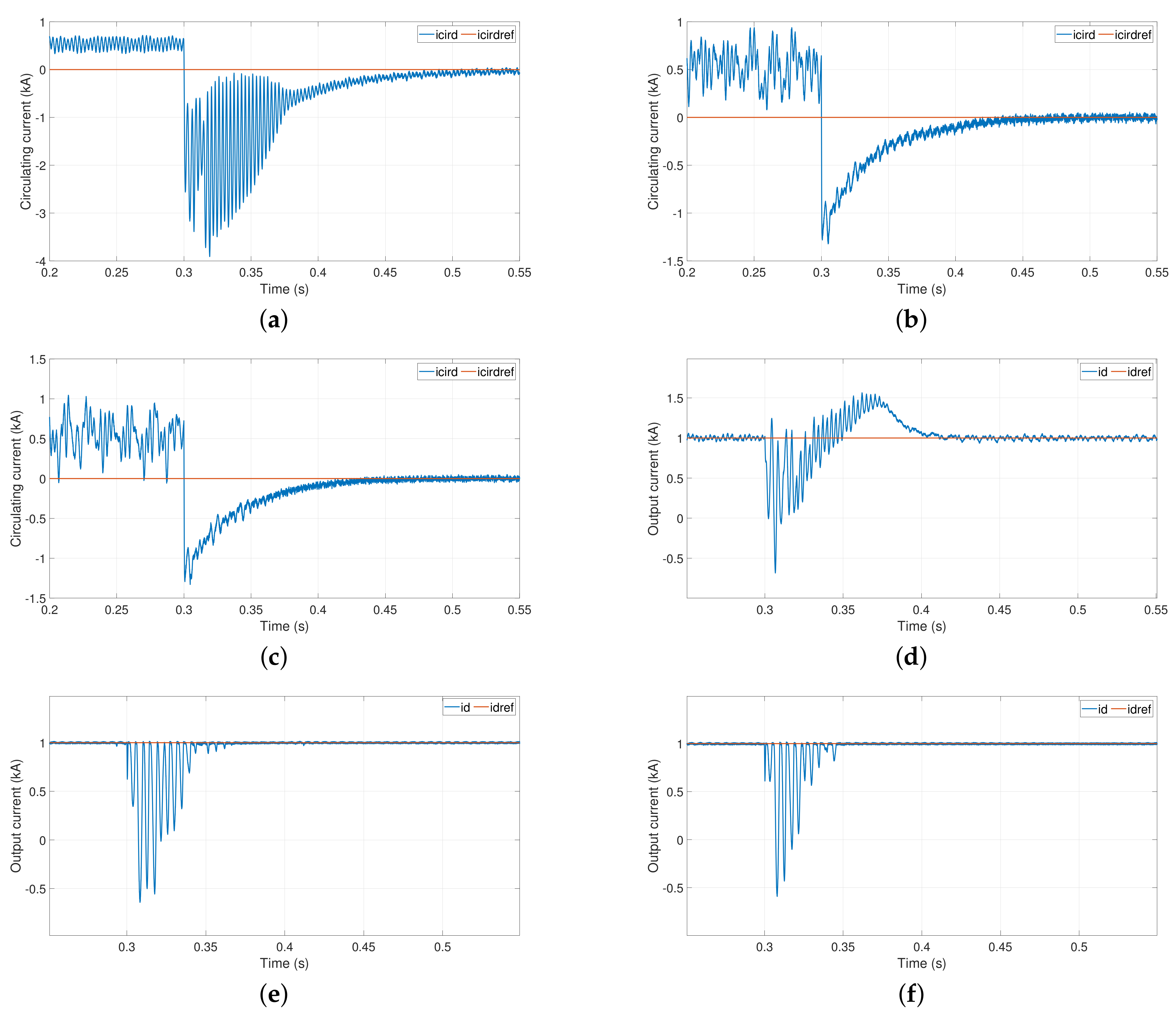
3.1.2. Case 2 Current Regulations under Short Circuit Conditions
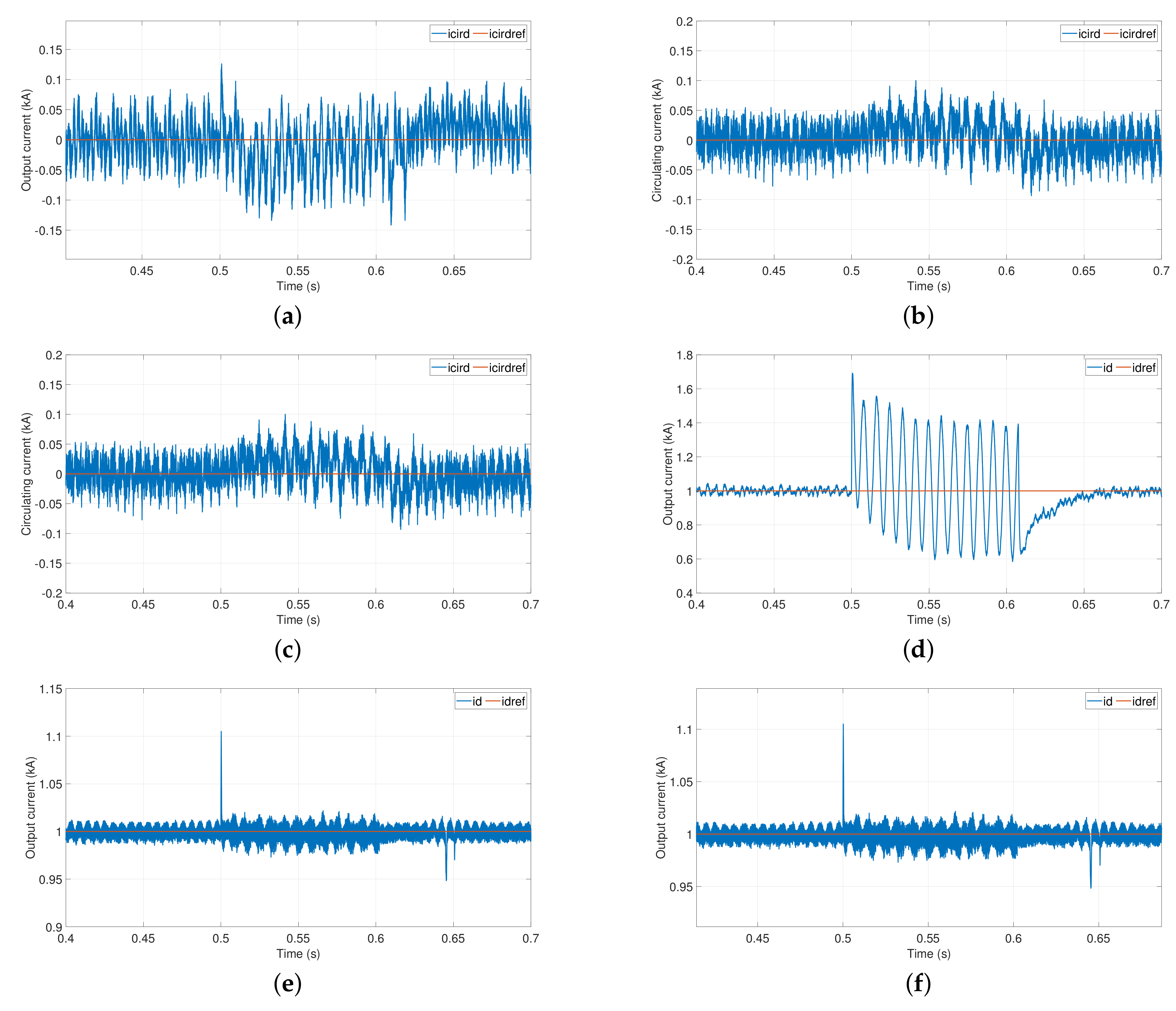
3.1.3. Case 3 Investigation of the Interaction between Output and Circulating Currents Control
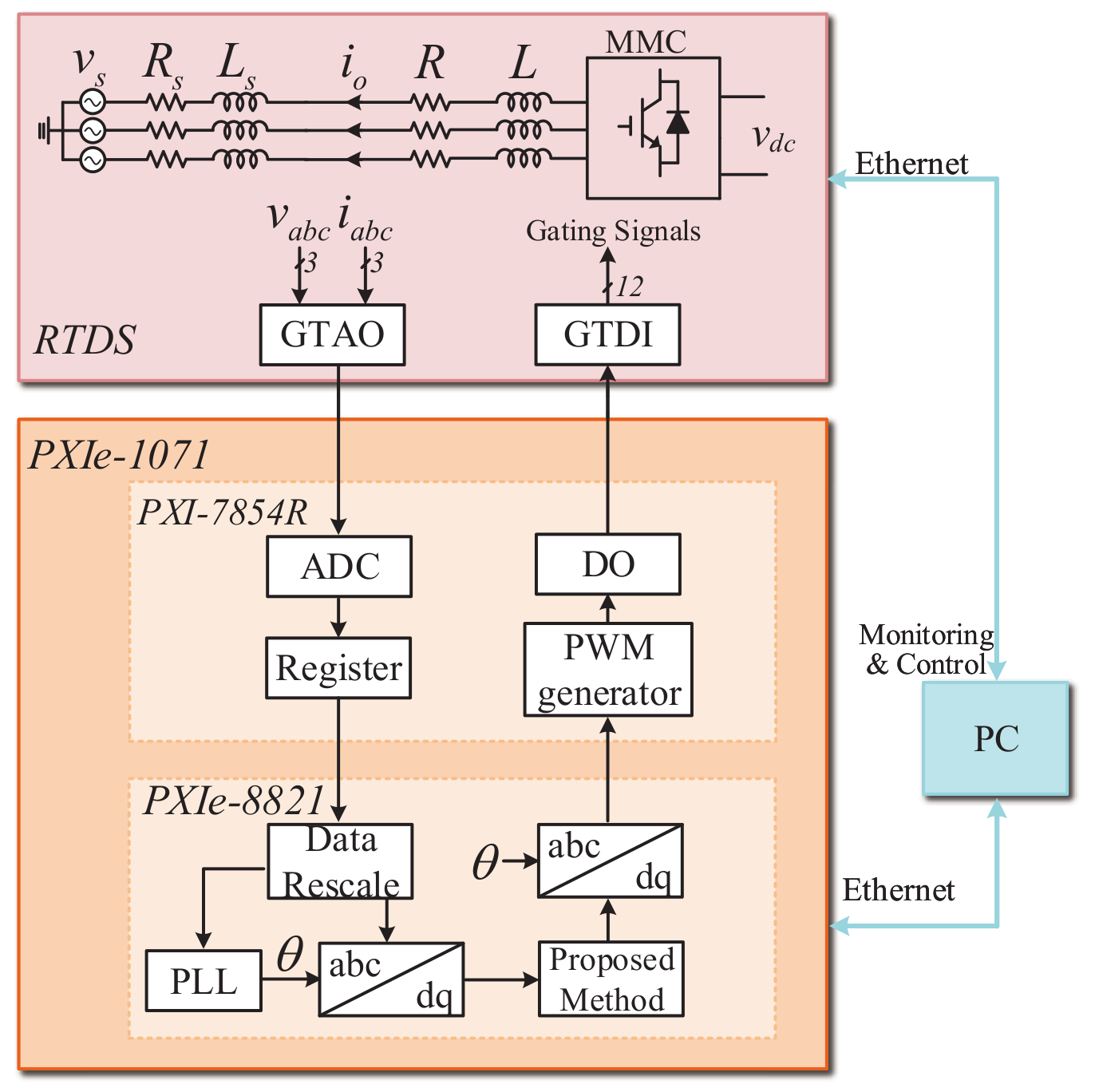
3.2. Experimental Results
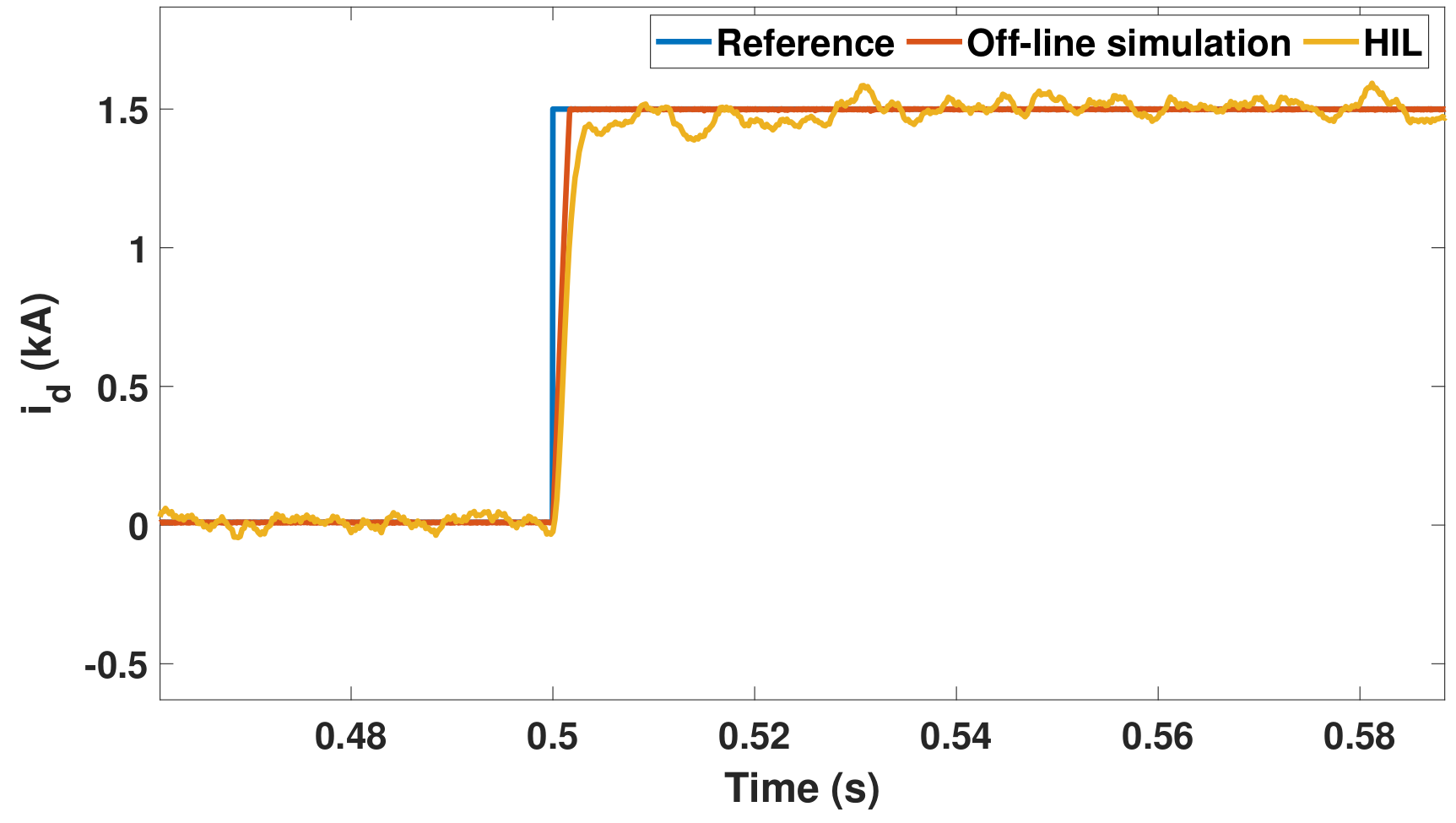
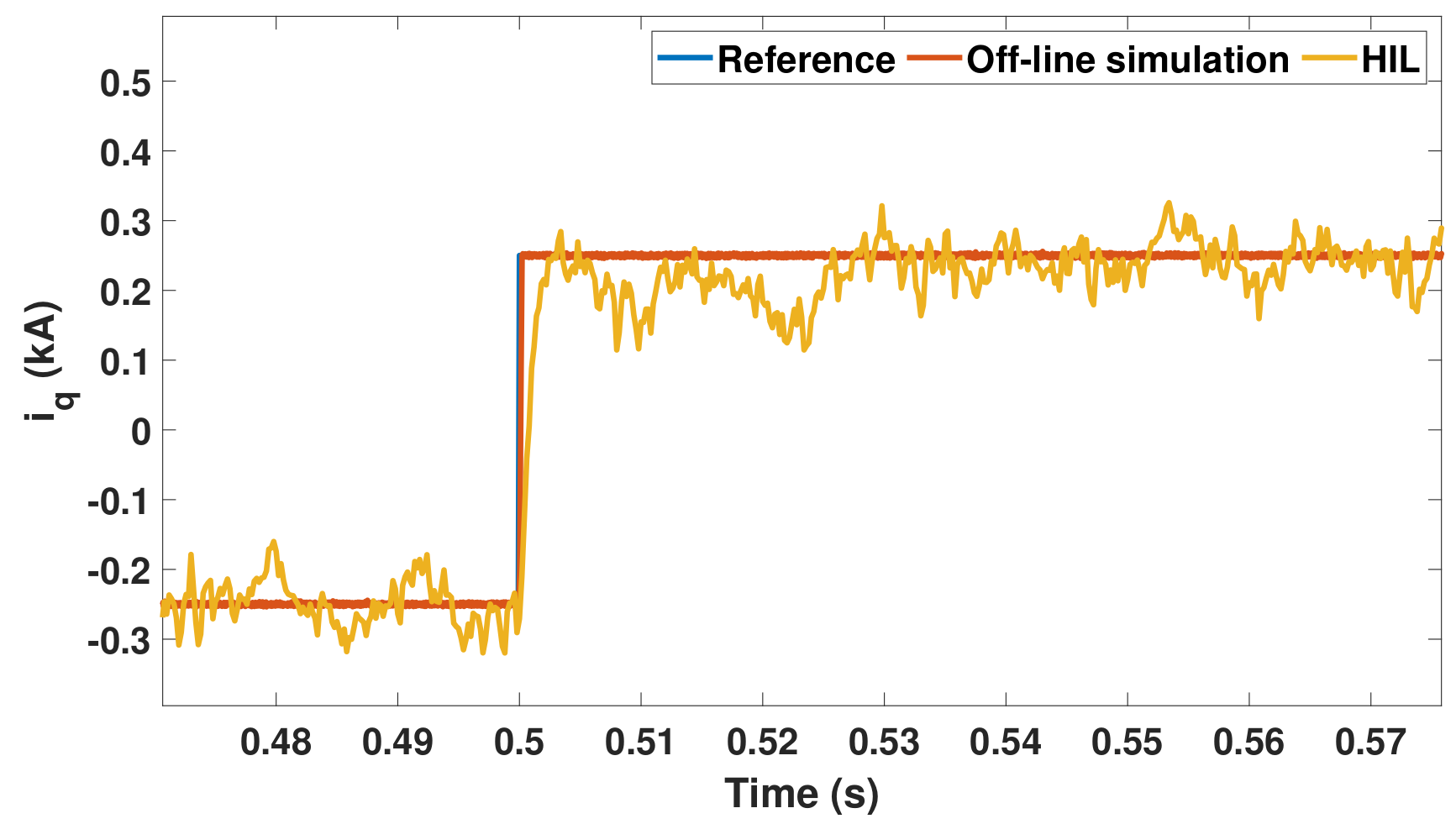
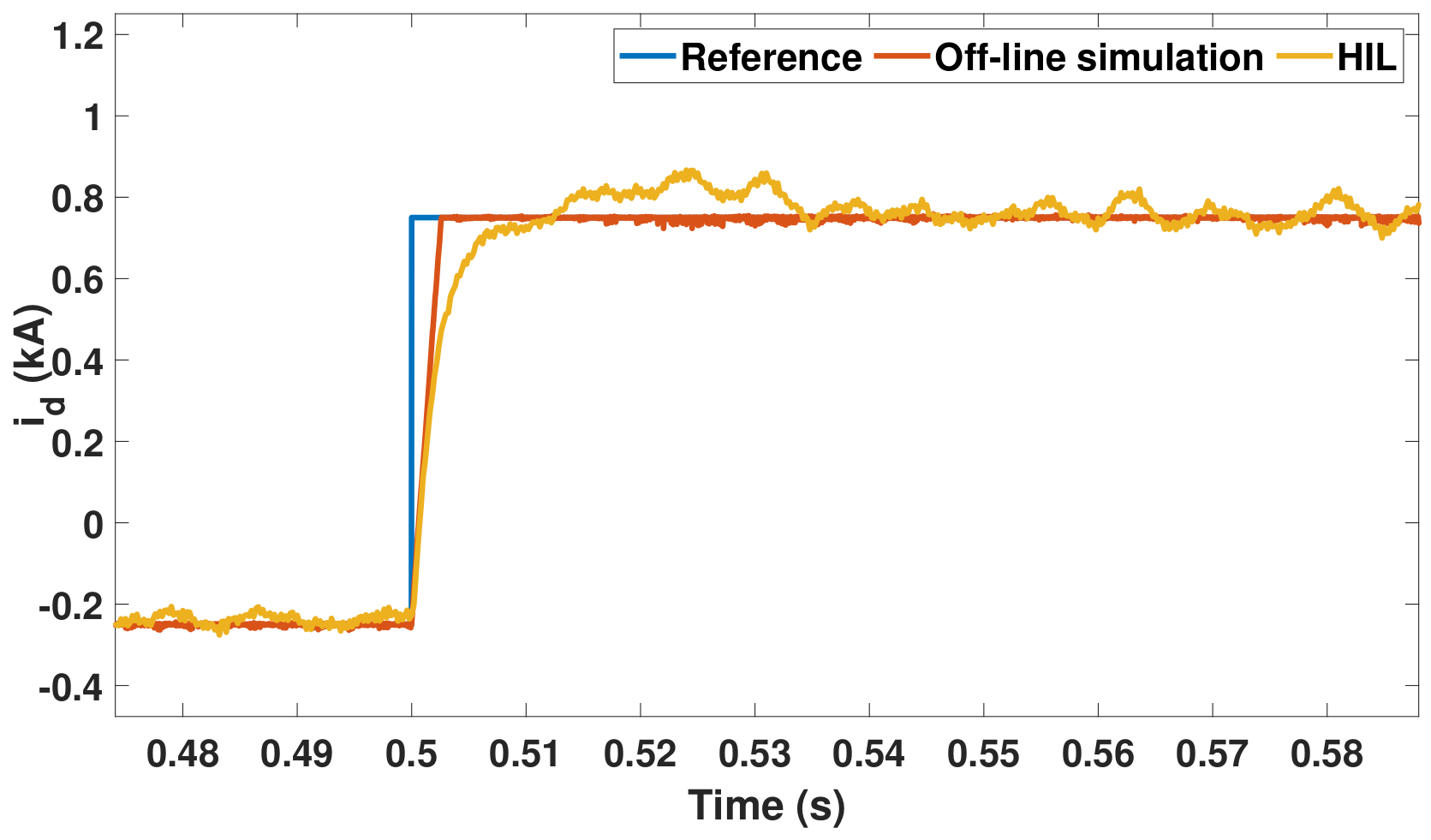
3.2.1. Case 1 Active and Reactive Currents Tracking
3.2.2. Case 2 Active Current Tracking under Weak Grid
3.2.3. Case 3 Currents Regulation under Grid Frequency Change
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Acronym | Meaning |
| j = abc | three phases (abc) |
| , | upper and lower arm currents |
| , | upper and lower arm voltages |
| arm resistor | |
| arm inductor | |
| R | line resistor |
| L | line inductor |
| circulating current | |
| output line current | |
| output line voltage | |
| , | output current in dq-axis |
| , | output voltage in dq-axis |
| modulating signals in dq-axis | |
| equivalent resistor | |
| equivalent inductor | |
| abc/dq | quantity in three phase (abc) and dq, respectively |
| , | proportional and integral constants, respectively |
| sgn | signum function |
| error of id | |
| error of iq | |
| switching gain | |
| sliding surface gain | |
| integral sliding surface | |
| discontinuous control signals | |
| angular frequency of grid voltage | |
| rise time for the output current tracking | |
| settling time for the output current tracking | |
| steady-state error for | |
| steady-state error for | |
| rise time for circulating current tracking | |
| settling time for the circulating current tracking | |
| steady-state error for | |
| steady-state error for | |
| ripple of upper arm capacitor voltage | |
| ripple of lower arm capacitor voltage |
References
- Bull, S.R. Renewable energy today and tomorrow. Proc. IEEE 2001, 89, 1216–1226. [Google Scholar] [CrossRef]
- IEA. Global Energy Review. Available online: https://www.iea.org/reports/global-energy-review-2020 (accessed on 21 September 2020).
- Mohan, N.; Undeland, T.; Robbins, W. Power Electronics: Converters, Applications, and Design; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Lai, J.-S.; Peng, F.Z. Multilevel converters-a new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar]
- Busquets-Monge, S.; Rocabert, J.; Rodriguez, P.; Alepuz, S.; Bordonau, J. Multilevel Diode-Clamped Converter for Photovoltaic Generators With Independent Voltage Control of Each Solar Array. IEEE Trans. Ind. Electron. 2008, 55, 2713–2723. [Google Scholar] [CrossRef]
- Glinka, M.; Marquardt, R. A new AC/AC multilevel converter family. IEEE Trans. Ind. Electron. 2005, 52, 662–669. [Google Scholar] [CrossRef]
- Du, S.; Wu, B.; Zargari, N. Delta-Channel Modular Multilevel Converter for a Variable-Speed Motor Drive Application. IEEE Trans. Ind. Electron. 2018, 65, 6131–6139. [Google Scholar] [CrossRef]
- Xu, F.; Xu, Z.; Zheng, H.; Tang, G.; Xue, Y. A Tripole HVDC System Based on Modular Multilevel Converters. IEEE Trans. Power Deliv. 2014, 29, 1683–1691. [Google Scholar] [CrossRef]
- Yang, J.; Song, P.; Xu, Z.; Xiao, H.; Cai, H.; Xie, Z. Small-signal model of vector current-controlled MMC-UPFC. IET Gener. Transm. Distrib. 2019, 13, 4180–4189. [Google Scholar] [CrossRef]
- Yu, X.; Wei, Y.; Jiang, Q. STATCOM Operation Scheme of the CDSM-MMC During a Pole-to-Pole DC Fault. IEEE Trans. Power Deliv. 2016, 31, 1150–1159. [Google Scholar] [CrossRef]
- Du, S.; Dekka, A.; Wu, B.; Zargari, N. Review of High-Power Converters. In Modular Multilevel Converters: Analysis, Control, and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 2018; pp. 1–36. [Google Scholar]
- Sher, H.A.; Addoweesh, K.E.; Al-Haddad, K. An Efficient and Cost-Effective Hybrid MPPT Method for a Photovoltaic Flyback Microinverter. IEEE Trans. Sustain. Energy 2018, 9, 1137–1144. [Google Scholar] [CrossRef]
- Alotaibi, S.; Darwish, A. Modular Multilevel Converters for Large-Scale Grid-Connected Photovoltaic Systems: A Review. Energies 2021, 14, 6213. [Google Scholar] [CrossRef]
- Wang, W.; Beddard, A.; Barnes, M.; Marjanovic, O. Analysis of Active Power Control for VSC-HVDC. IEEE Trans. Power Deliv. 2014, 29, 1978–1988. [Google Scholar] [CrossRef]
- Du, S.; Dekka, A.; Wu, B.; Zargari, N. Role of Modular Multilevel Converters in The Power System. In Modular Multilevel Converters: Analysis, Control, and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 2018; pp. 271–309. [Google Scholar]
- Yang, S.; Tang, Y.; Wang, P. Distributed Control for a Modular Multilevel Converter. IEEE Trans. Power Electron. 2018, 33, 5578–5591. [Google Scholar] [CrossRef]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P.C. Proportional-resonant controllers and filters for grid-connected voltage-source converters. IEE Proc. Electr. Power Appl. 2006, 153, 750–762. [Google Scholar] [CrossRef] [Green Version]
- Qin, J.; Saeedifard, M. Predictive Control of a Modular Multilevel Converter for a Back-to-Back HVDC System. IEEE Trans. Power Deliv. 2012, 27, 1538–1547. [Google Scholar]
- Vatani, M.; Bahrani, B.; Saeedifard, M.; Hovd, M. Indirect Finite Control Set Model Predictive Control of Modular Multilevel Converters. IEEE Trans. Smart Grid 2015, 6, 1520–1529. [Google Scholar] [CrossRef] [Green Version]
- Montoya-Acevedo, D.A.; Buitrago-Herrera, J.C.; Escobar-Mejia, A. Feedback linearization applicable to the state-space modelling of an HVDC terminal based on modular multilevel converteter. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 2666–2672. [Google Scholar]
- Utkin, V.; Lee, H. Chattering Problem in Sliding Mode Control Systems. In Proceedings of the International Workshop on Variable Structure Systems (VSS’06), Alghero, Sardinia, 5–7 June 2006; pp. 346–350. [Google Scholar]
- Tanelli, M.; Ferrara, A. Enhancing Robustness and Performance via Switched Second Order Sliding Mode Control. IEEE Trans. Autom. Control 2013, 58, 962–974. [Google Scholar] [CrossRef]
- Yang, Q.; Saeedifard, M.; Perez, M.A. Sliding Mode Control of the Modular Multilevel Converter. IEEE Trans. Ind. Electron. 2019, 66, 887–897. [Google Scholar] [CrossRef]
- Ishfaq, M.; Uddin, W.; Zeb, K.; Islam, S.U.; Hussain, S.; Khan, I.; Kim, H.J. Active and Reactive Power Control of Modular Multilevel Converter Using Sliding Mode Controller. In Proceedings of the 2019 2nd International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 30–31 January 2019; pp. 1–5. [Google Scholar]
- Uddin, W.; Zeb, K.; Adil Khan, M.; Ishfaq, M.; Khan, I.; Islam, S.U.; Kim, H.J.; Park, G.S.; Lee, C. Control of Output and Circulating Current of Modular Multilevel Converter Using a Sliding Mode Approach. Energies 2019, 12, 4084. [Google Scholar] [CrossRef] [Green Version]
- Harnefors, L.; Antonopoulos, A.; Norrga, S.; Angquist, L.; Nee, H. Dynamic Analysis of Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2013, 60, 2526–2537. [Google Scholar] [CrossRef]
- Wu, R.; Dewan, S.B.; Slemon, G.R. A PWM AC-to-DC converter with fixed switching frequency. IEEE Trans. Ind. Appl. 1990, 26, 880–885. [Google Scholar] [CrossRef]
- Freytes, J.; Bergna, G.; Suul, J.A.; D’Arco, S.; Gruson, F.; Colas, F.; Saad, H.; Guillaud, X. Improving Small-Signal Stability of an MMC With CCSC by Control of the Internally Stored Energy. IEEE Trans. Power Deliv. 2018, 33, 429–439. [Google Scholar] [CrossRef] [Green Version]
- Tu, Q.; Xu, Z.; Xu, L. Reduced Switching-Frequency Modulation and Circulating Current Suppression for Modular Multilevel Converters. IEEE Trans. Power Deliv. 2011, 26, 2009–2017. [Google Scholar] [CrossRef]
- Yang, Z.; Zhang, K.; Li, X.; Li, Y.; Song, P. A Control Strategy for Suppressing Submodule Capacitor Voltage Fluctuation of MMC Based on Circulating Current Voltage Drop Balance. IEEE Access 2021, 9, 9130–9141. [Google Scholar] [CrossRef]
- Gao, W.; Wang, Y.; Homaifa, A. Discrete-time variable structure control systems. IEEE Trans. Ind. Electron. 1995, 42, 117–122. [Google Scholar] [CrossRef]
- Liu, Y.; Xi, Z.; Liang, Z.; Song, W.; Bhattacharya, S.; Huang, A.; Langston, J.; Steurer, M.; Litzenberger, W.; Anderson, L.; et al. Controller hardware-in-the-loop validation for a 10 MVA ETO-based STATCOM for wind farm application. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 1398–1403. [Google Scholar] [CrossRef]
- Lo, Y.H.; Chen, Y.C.; Lian, K.L.; Karimi, H.; Wang, C.Z. An Iterative Control Method for Voltage Source Converters to Eliminate Uncharacteristic Harmonics Under Unbalanced Grid Voltages for High-Power Applications. IEEE Trans. Sustain. Energy 2019, 10, 1419–1429. [Google Scholar] [CrossRef]
- Gui, Y.; Kim, C.; Chung, C.C.; Guerrero, J.M.; Guan, Y.; Vasquez, J.C. Improved Direct Power Control for Grid-Connected Voltage Source Converters. IEEE Trans. Ind. Electron. 2018, 65, 8041–8051. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value | Unit |
|---|---|---|---|
| Grid voltage (line-to-line) | 4160 | V | |
| Grid frequency | f | 60 | Hz |
| DC-link voltage | 8320 | V | |
| Grid inductance | mH | ||
| Grid resistance | |||
| Filter inductance | L | mH | |
| Line resistance | R | ||
| Arm inductance | mH | ||
| Arm resistance | |||
| Numbers of submodule | N | ||
| Submodule capacitance | mF | ||
| Switching frequency | 6000 | Hz |
| Controller | Parameters | Value |
|---|---|---|
| PI | Proportional constant | |
| Integrator constant | ||
| SMC | Switching gain | 1250 |
| Proposed | Switching gain | 1250 |
| Sliding surface gain | ||
| constant q | ||
| PI for CCC | Proportional constant | |
| Integrator constant | ||
| Feedforward constant K | 6 |
| Active current tracking | |||
| Proposed | (ms) | (s) | 0 (mA) |
| SMC | (s) | (s) | 0 (mA) |
| PI control | (s) | (s) | 11 (mA) |
| Reactive current tracking | |||
| Proposed | (s) | (s) | 0 (mA) |
| SMC | (s) | (s) | 0 (mA) |
| PI control | (s) | (s) | 20 (mA) |
| Proposed | (s) | (s) | 40 (mA) | 821 (V) | 817 (V) | (kA) | 0 (kA) |
| SMC | (s) | (s) | 41 (mA) | 856 (V) | 863 (V) | (kA) | 0 (kA) |
| PI control | (s) | (s) | 62 (mA) | 820 (V) | 808(V) | (kA) | (kA) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, B.-Y.; Subroto, R.K.; Wang, C.-Z.; Lian, K.-L. An Improved Sliding Mode Control with Integral Surface for a Modular Multilevel Power Converter. Energies 2022, 15, 1704. https://doi.org/10.3390/en15051704
Luo B-Y, Subroto RK, Wang C-Z, Lian K-L. An Improved Sliding Mode Control with Integral Surface for a Modular Multilevel Power Converter. Energies. 2022; 15(5):1704. https://doi.org/10.3390/en15051704
Chicago/Turabian StyleLuo, Bo-Yu, Ramadhani Kurniawan Subroto, Chang-Zhi Wang, and Kuo-Lung Lian. 2022. "An Improved Sliding Mode Control with Integral Surface for a Modular Multilevel Power Converter" Energies 15, no. 5: 1704. https://doi.org/10.3390/en15051704
APA StyleLuo, B.-Y., Subroto, R. K., Wang, C.-Z., & Lian, K.-L. (2022). An Improved Sliding Mode Control with Integral Surface for a Modular Multilevel Power Converter. Energies, 15(5), 1704. https://doi.org/10.3390/en15051704