
Single-Phase Charging of EV Embedded Batteries in an MMC with Submodule Override Capability


Abstract
:1. Introduction
2. MMC-EB as Onboard Battery Charger
MMC-EB Basic Operation
3. MMC-EB Single-Phase Charger with SM Override Capability
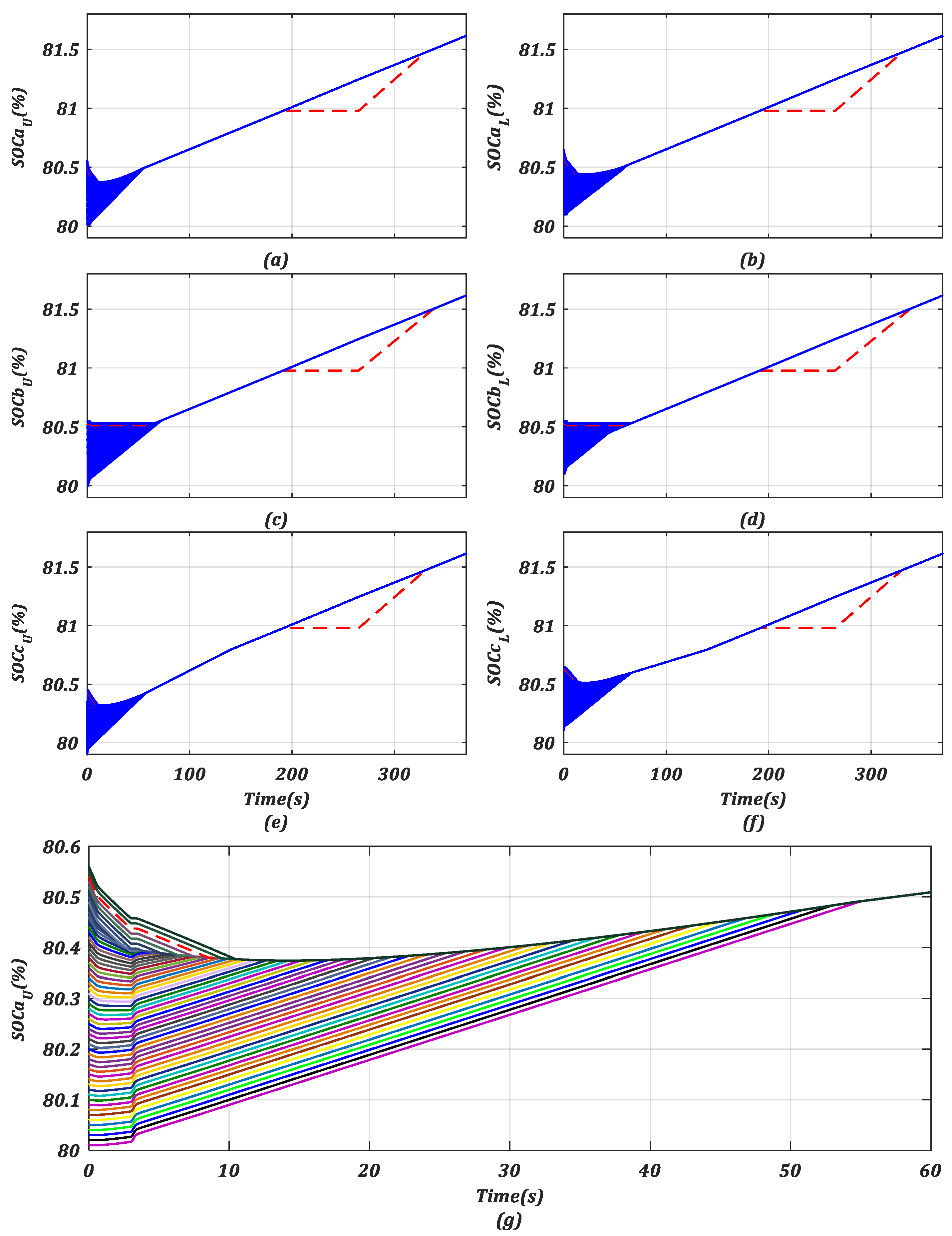
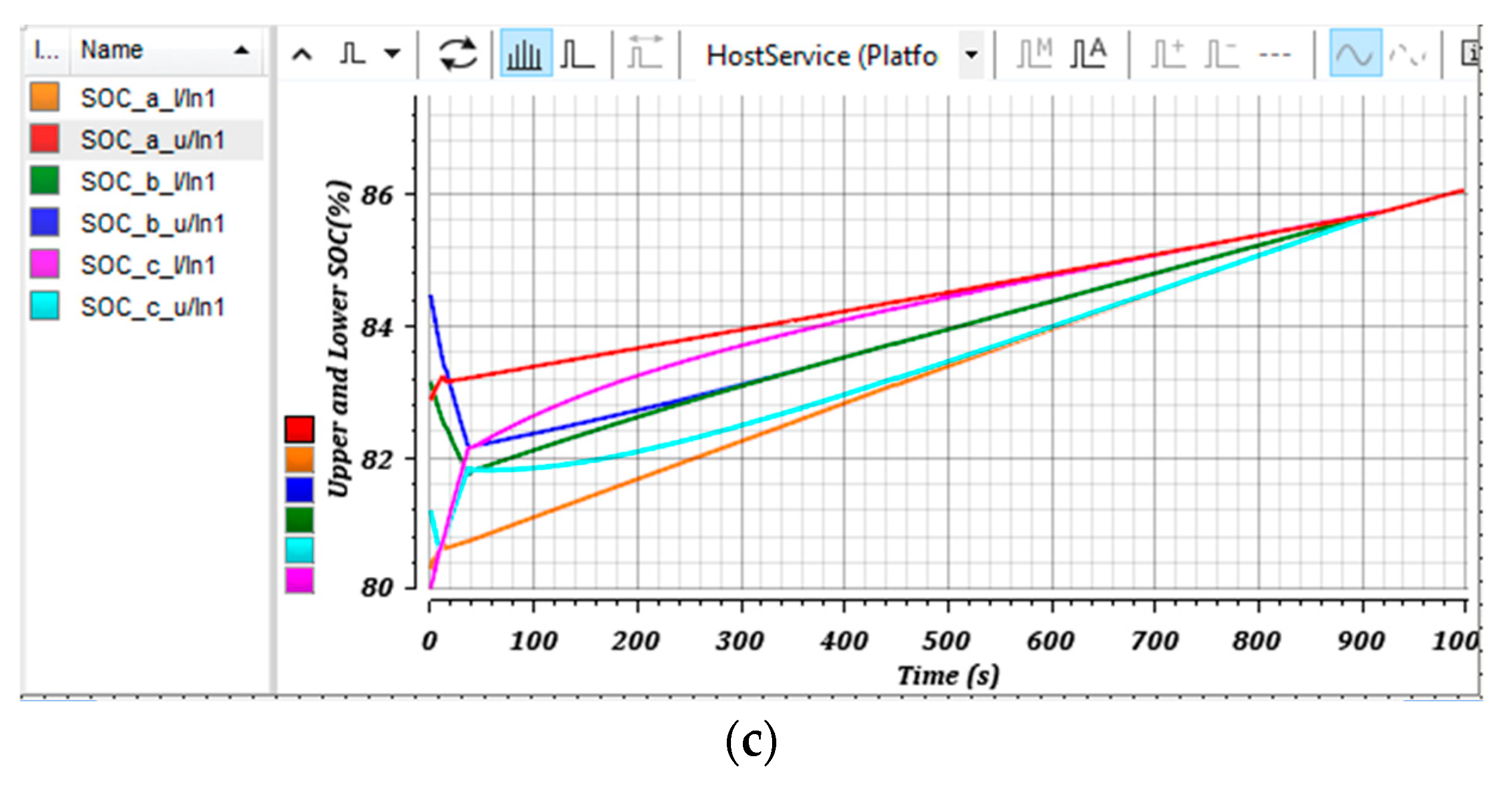
- SOC of the converter SM batteries managed to be closely balanced (battery management operation);
- Capability of the converter control to override any individual SM while the rest of the converter SM batteries continue to be charged;
- Minimising circulating currents in converter legs to decrease the RMS value of the arm currents, consequently decreasing the converter losses [24].
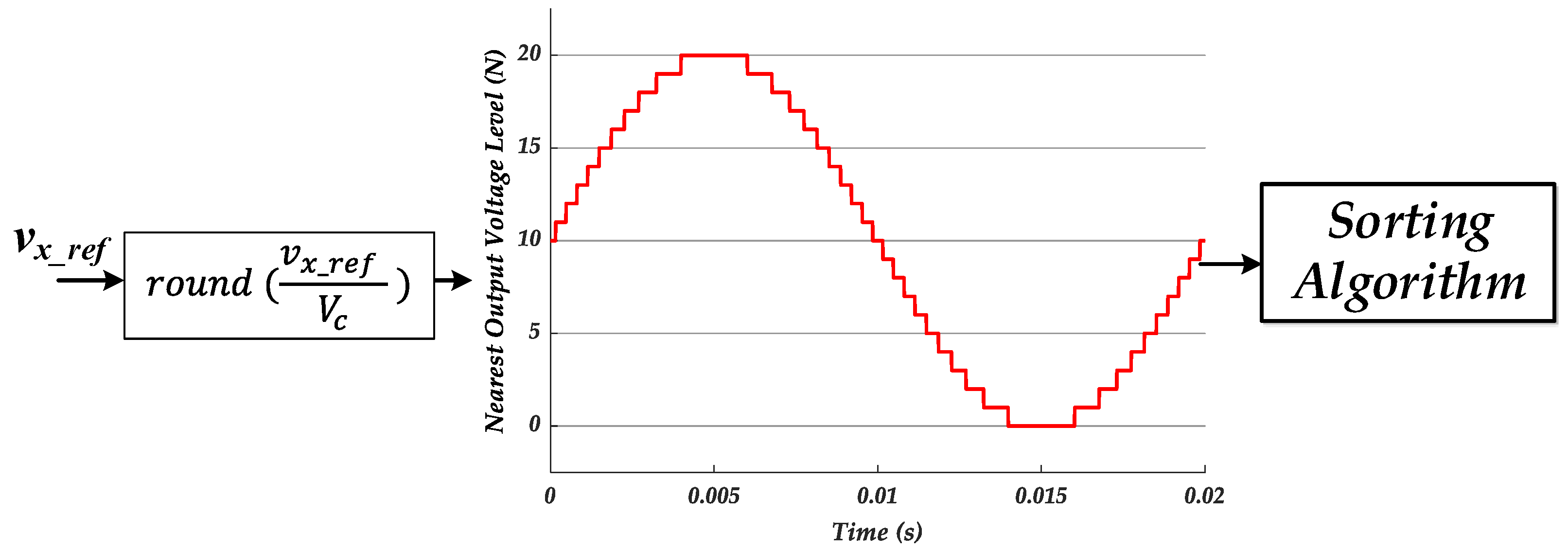
3.1. SM SOC Controller with EB Override
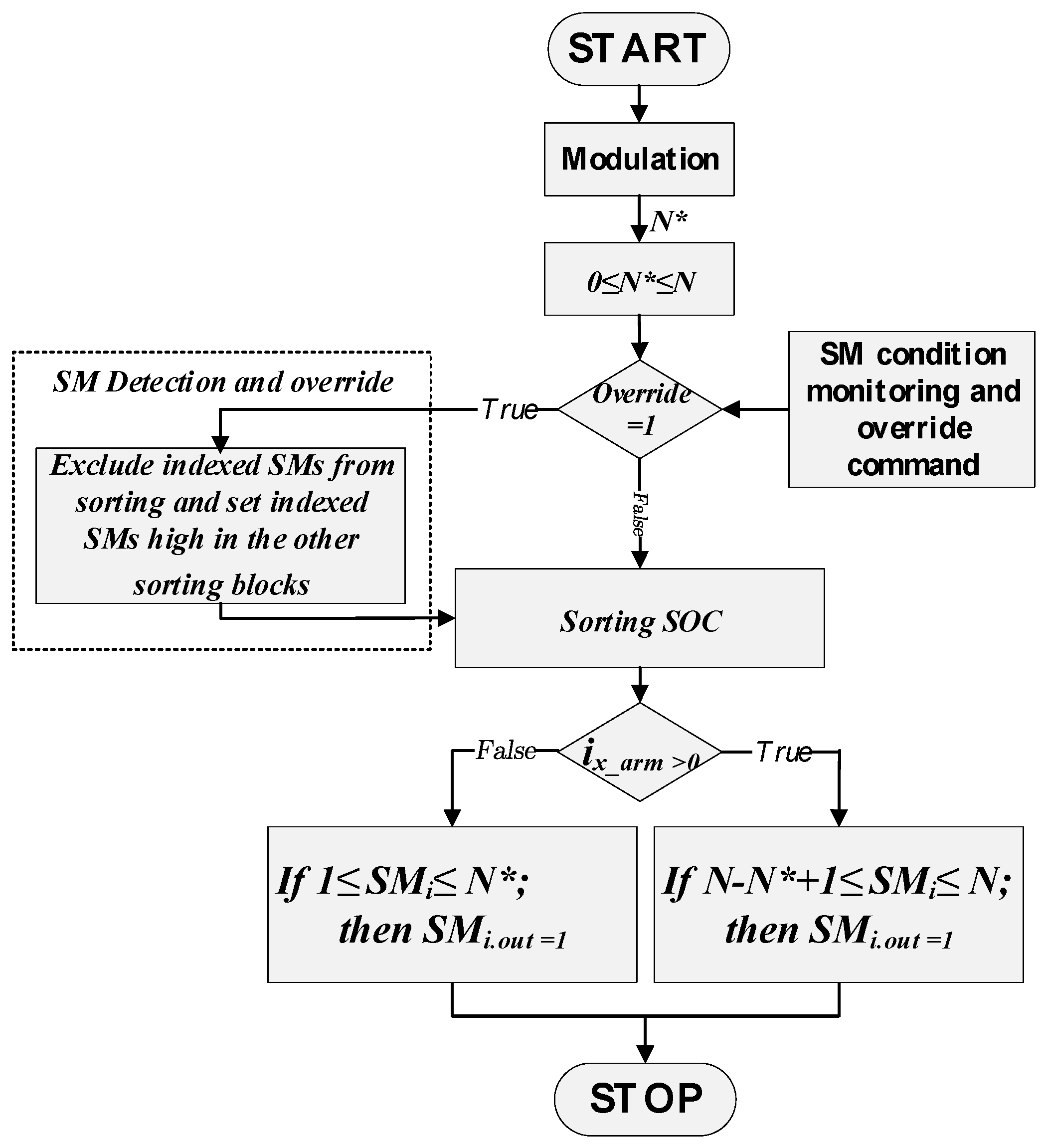
- If is positive, then any SM with an index located in the range of is inserted to form the arm voltage waveform ( = off and = on). The inserted SM will then charge during that sampling period; indexes in the range of are bypassed ( = on and = off);
- If is negative, then any SM that is located between is inserted ( = off and = on). In this case the inserted SM will discharge.
3.2. SM Override Capability of the MMC-EB
3.3. Sorting Optimisation
3.4. Converter Leg Controller
3.5. Arm Controller
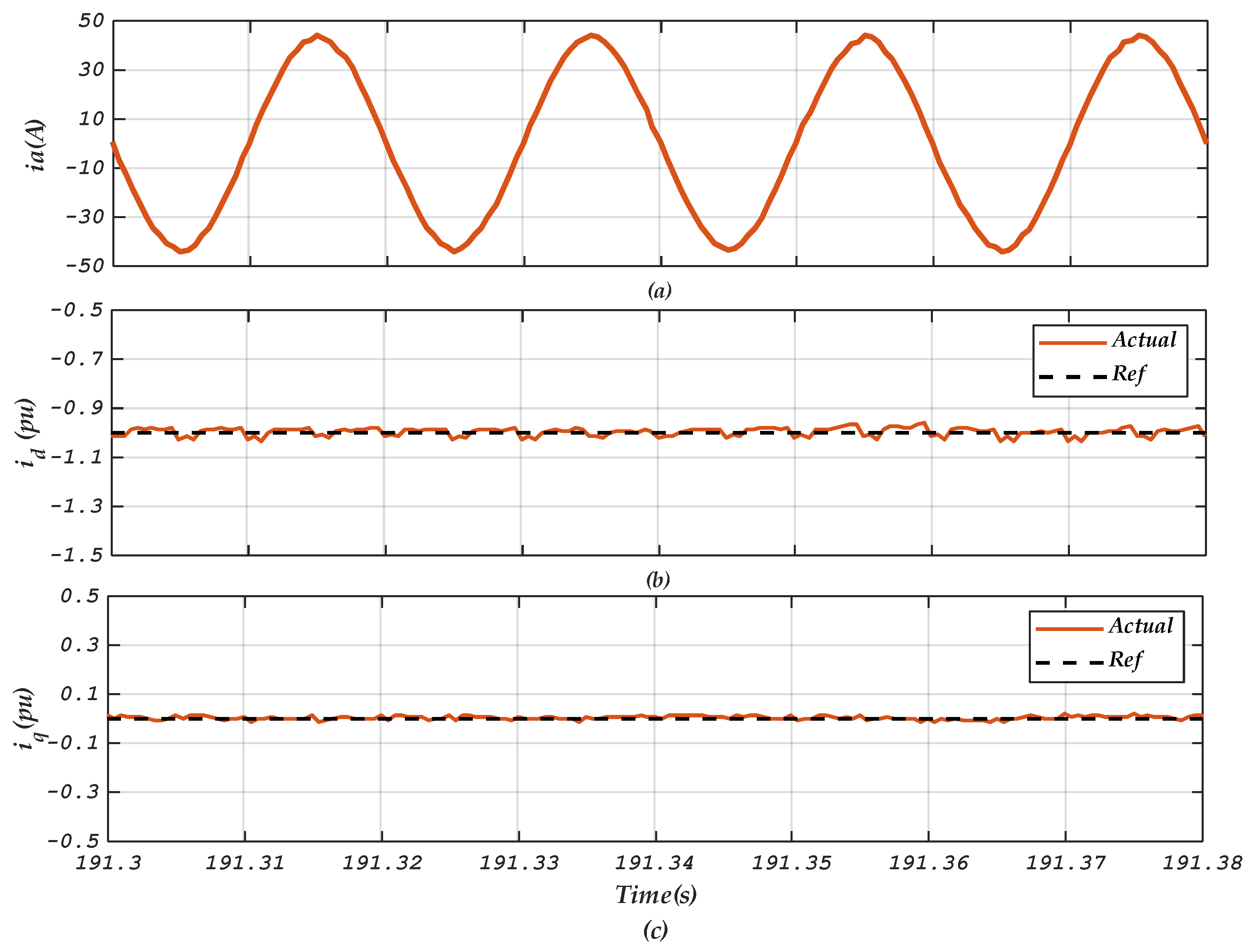
3.6. Voltage Oriented Control
4. Simulation of MMC-EB Charging When Connected to a Single-Phase Grid
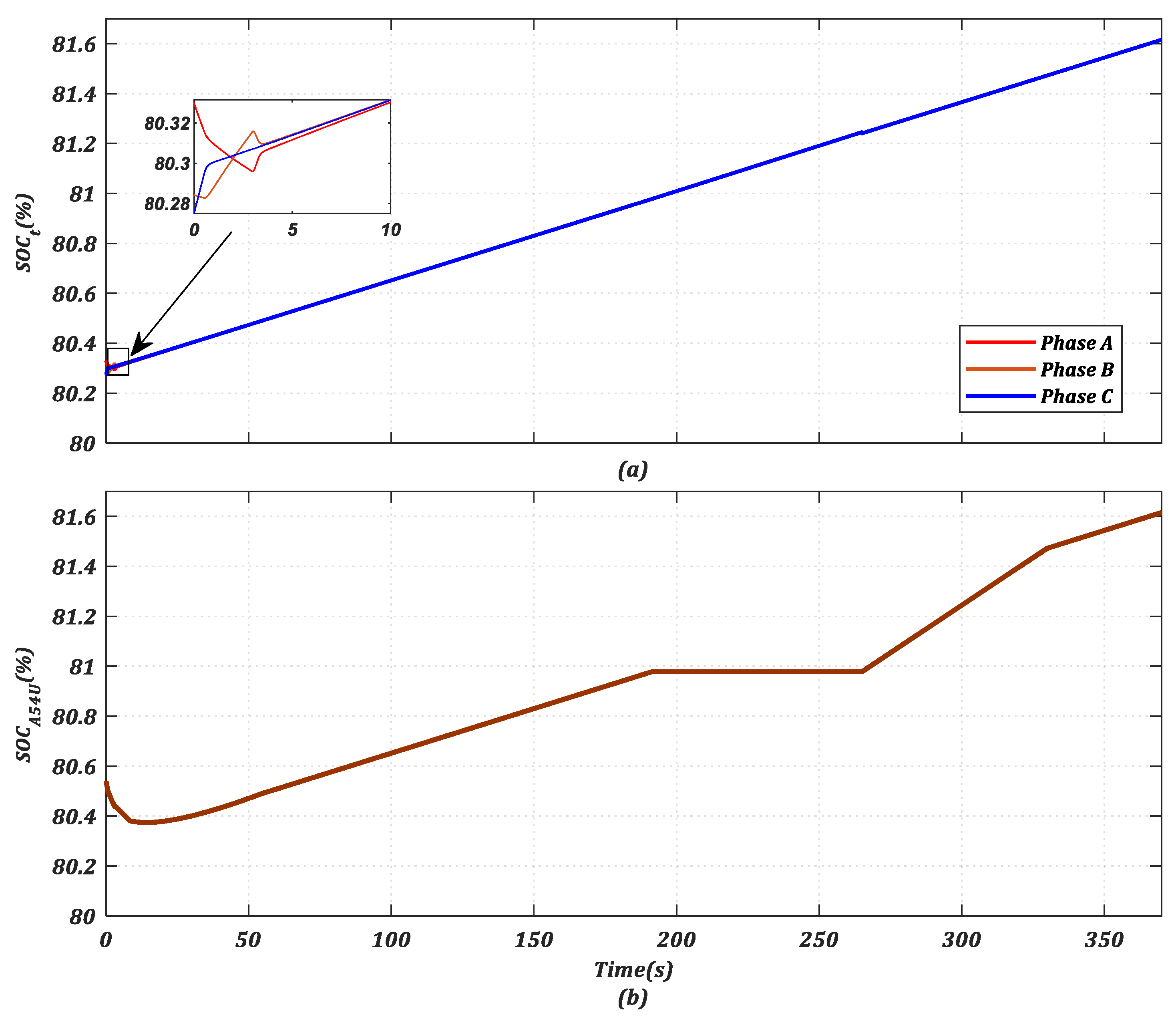
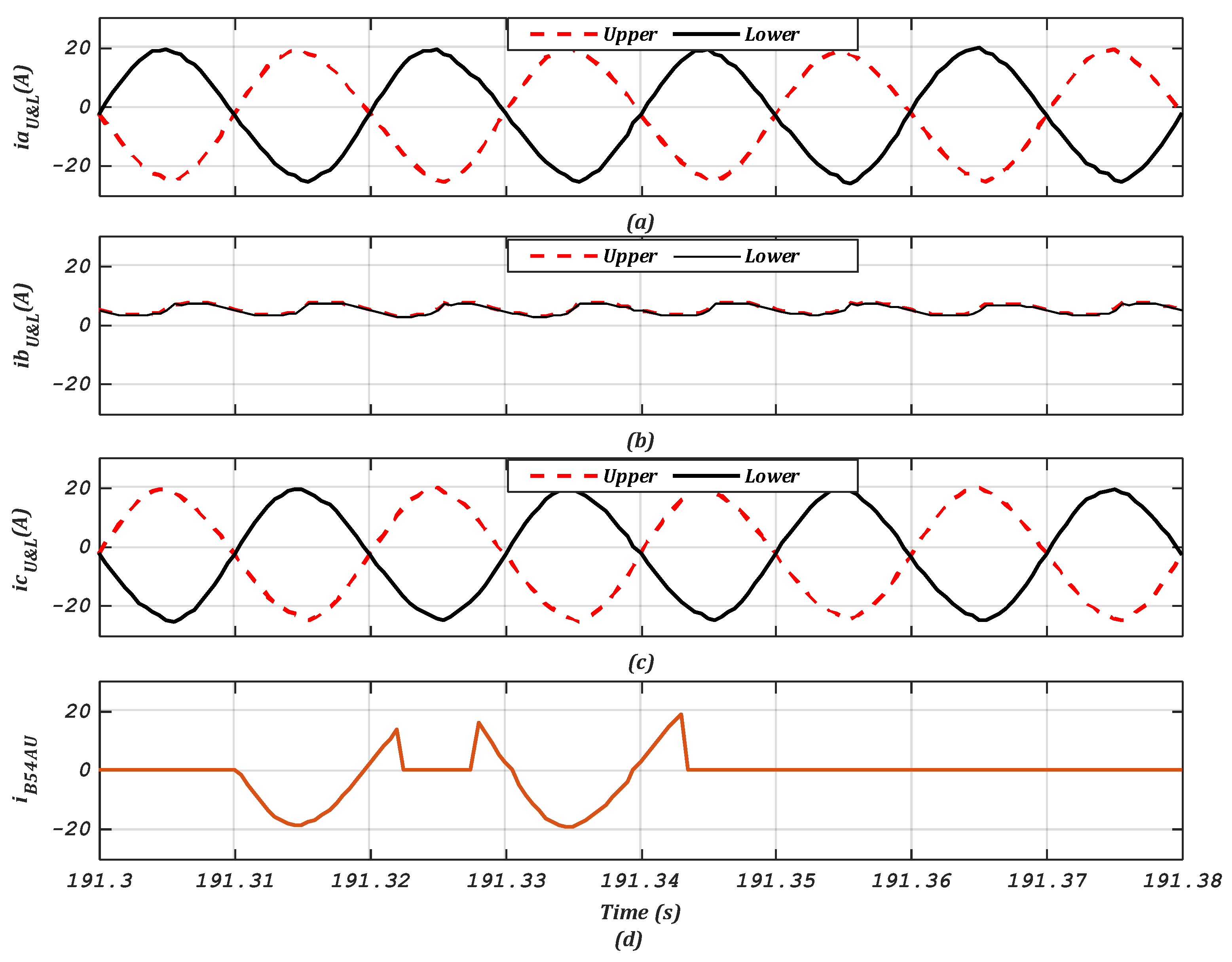
4.1. Case Study of One SM Bypassed in Each Arm Due to an Elevated Embedded Battery Temperature
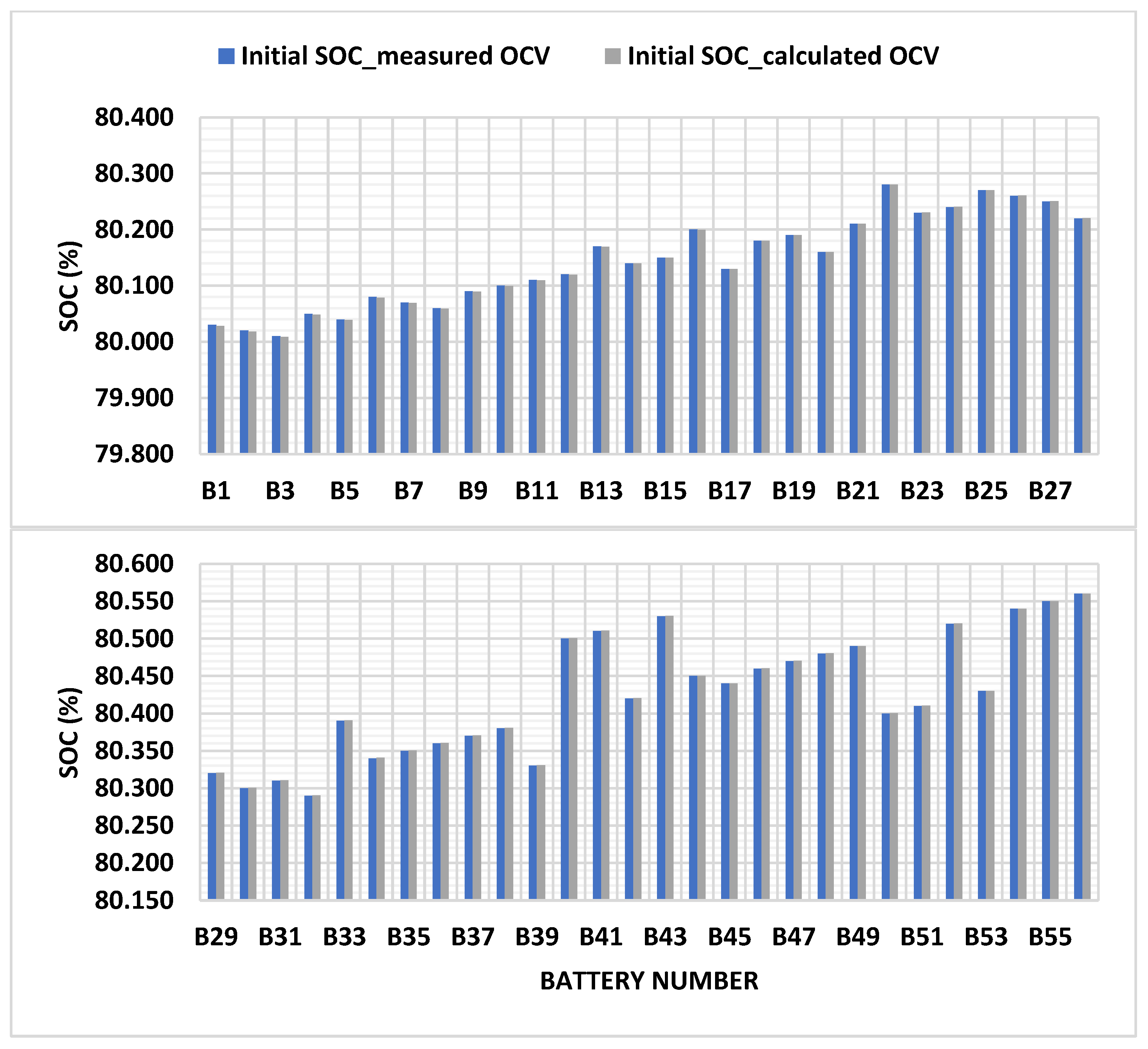
4.2. Measurement of OCV and Estimation of Initial SOC of EBs
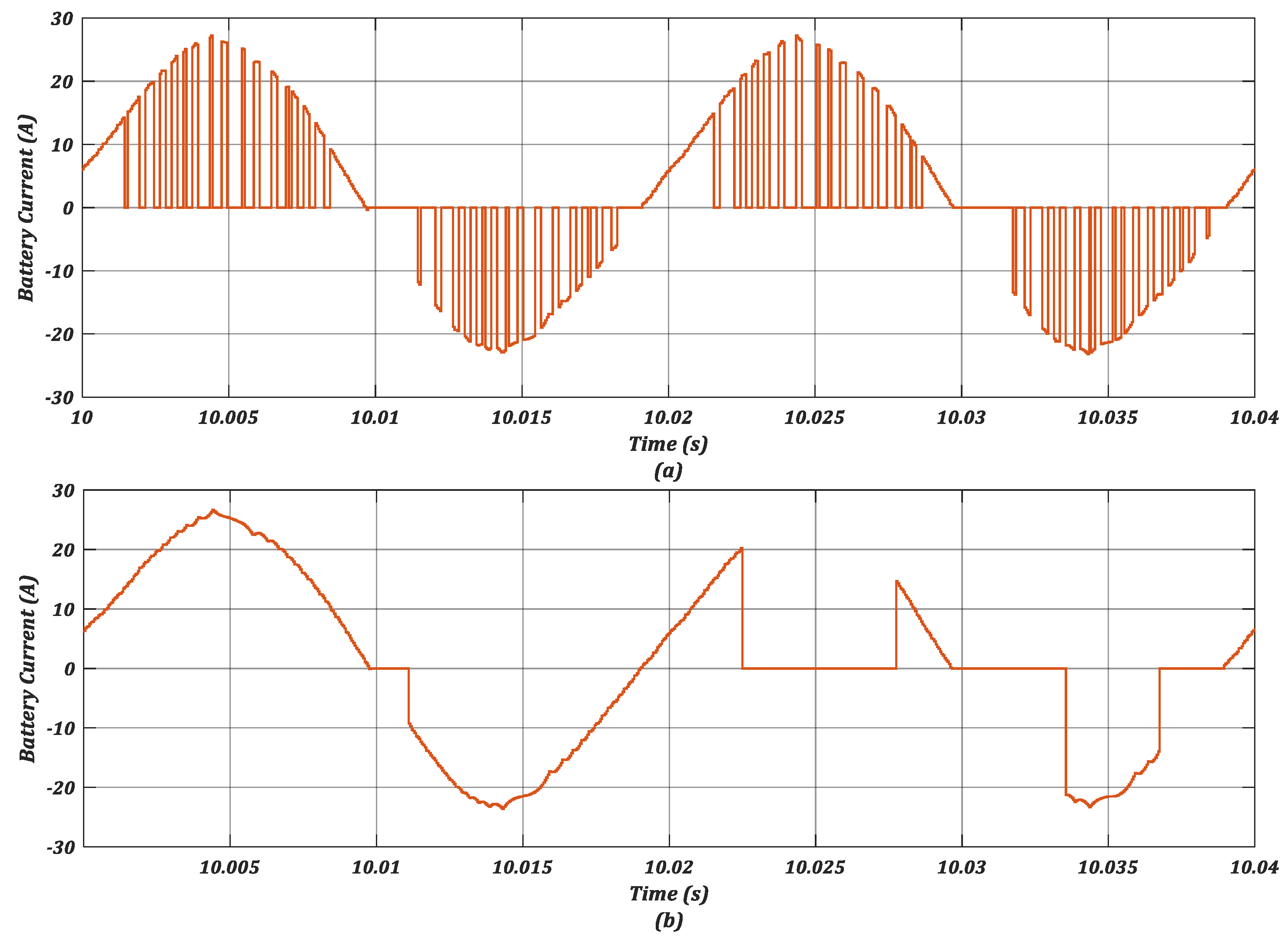
- Region 1: Voltage reference is positive and R equals 1;
- Region 2: Voltage reference is positive and R equals 0;
- Region 3: Voltage reference is negative and R equals 0;
- Region 4: Voltage reference is negative and R equals 1.
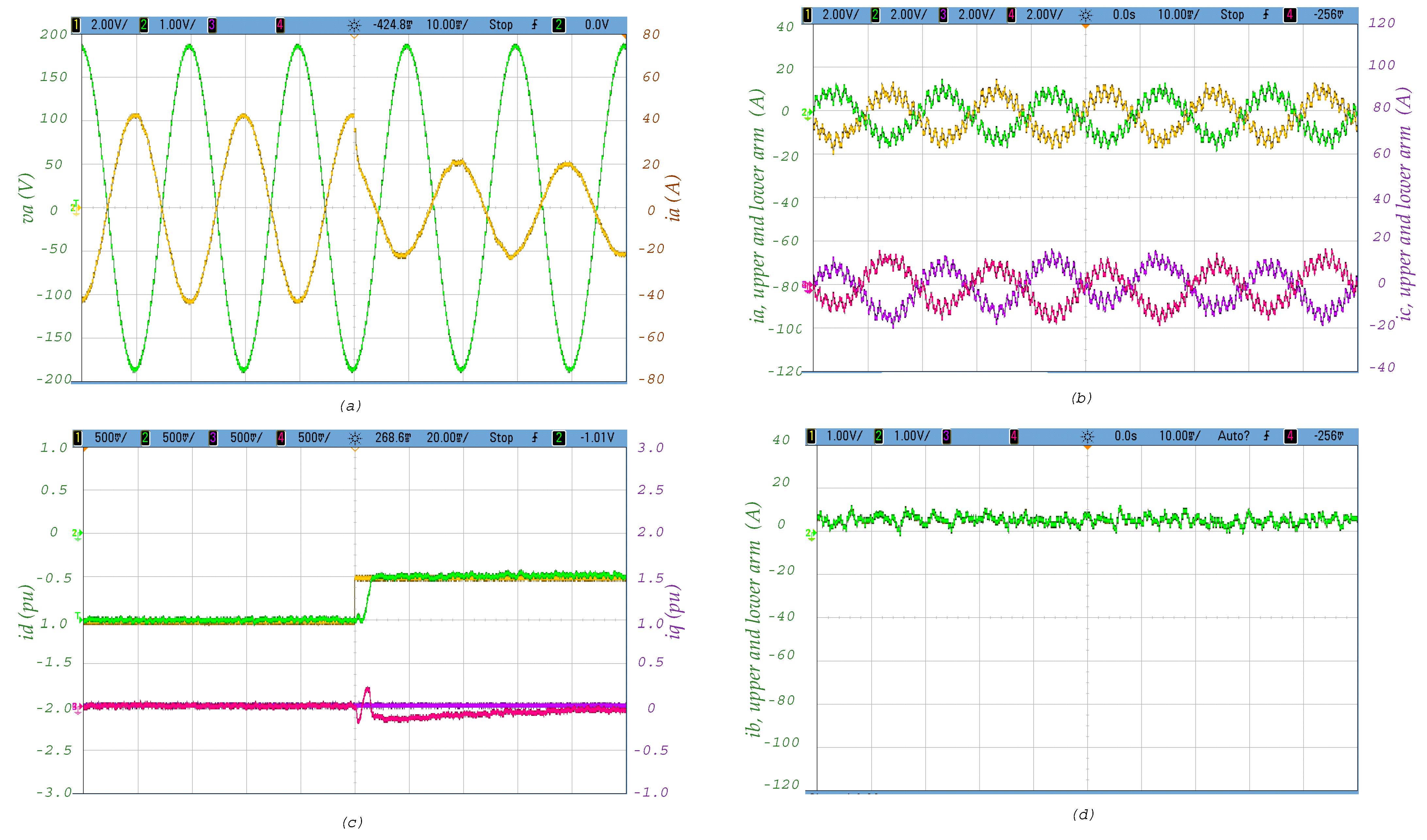
5. Real Time Validation of the Proposed Single-Phase Charging Method
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Khaligh, A.; Antonio, M.D. Global Trends in High-Power On-Board Chargers for Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 3306–3324. [Google Scholar] [CrossRef]
- Sousa, L.D.; Silvestre, B.; Bouchez, B. A combined multiphase electric drive and fast battery charger for Electric Vehicles. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Bruyère, A.; Sousa, L.D.; Bouchez, B.; Sandulescu, P.; Kestelyn, X.; Semail, E. A multiphase traction/fast-battery-charger drive for electric or plug-in hybrid vehicles: Solutions for control in traction mode. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–7. [Google Scholar]
- Shi, C.; Tang, Y.; Khaligh, A. A Three-Phase Integrated Onboard Charger for Plug-In Electric Vehicles. IEEE Trans. Power Electron. 2018, 33, 4716–4725. [Google Scholar] [CrossRef]
- Ye, J.; Shi, C.; Khaligh, A. Single-Phase Charging Operation of a Three-Phase Integrated Onboard Charger for Electric Vehicles. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 681–686. [Google Scholar]
- Liu, S.; Xin, D.; Yang, L. A Novel Single-Phase Bidirectional Electric-Drive-Reconstructed Onboard Converter for Electric Vehicles. IEEE Access 2020, 8, 44739–44747. [Google Scholar] [CrossRef]
- Zhao, H.; Shen, Y.; Ying, W.; Ghosh, S.S.; Ahmed, M.R.; Long, T. A Single- and Three-Phase Grid Compatible Converter for Electric Vehicle On-Board Chargers. IEEE Trans. Power Electron. 2020, 35, 7545–7562. [Google Scholar] [CrossRef]
- Subotic, I.; Bodo, N.; Levi, E. Single-Phase On-Board Integrated Battery Chargers for EVs Based on Multiphase Machines. IEEE Trans. Power Electron. 2016, 31, 6511–6523. [Google Scholar] [CrossRef] [Green Version]
- Arco, S.D.; Piegari, L.; Tricoli, P. Power and balancing control considerations on modular multilevel converters for battery electric vehicles. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; pp. 1–9. [Google Scholar]
- Ronanki, D.; Williamson, S.S. Modular Multilevel Converters for Transportation Electrification: Challenges and Opportunities. IEEE Trans. Transp. Electrif. 2018, 4, 399–407. [Google Scholar] [CrossRef]
- Wang, D.; Liu, J.; Piegari, L.; Song, S.; Chen, X.; De Simone, D. A Battery Lifetime Improved Control Strategy of Modular Multilevel Converter for Electric Vehicle Application. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019; pp. 594–598. [Google Scholar]
- Quraan, M.; Yeo, T.; Tricoli, P. Design and Control of Modular Multilevel Converters for Battery Electric Vehicles. IEEE Trans. Power Electron. 2016, 31, 507–517. [Google Scholar] [CrossRef]
- Konstantinou, G.; Zhang, J.; Ceballos, S.; Pou, J.; Agelidis, V.G. Comparison and evaluation of sub-module configurations in modular multilevel converters. In Proceedings of the 2015 IEEE 11th International Conference on Power Electronics and Drive Systems, Sydney, Australia, 9–12 June 2015; pp. 958–963. [Google Scholar]
- Arco, S.D.; Piegari, L.; Tricoli, P. A modular converter with embedded battery cell balancing for electric vehicles. In Proceedings of the 2012 Electrical Systems for Aircraft, Railway and Ship Propulsion, Bologna, Italy, 16–18 October 2012; pp. 1–6. [Google Scholar]
- Gan, C.; Sun, Q.; Wu, J.; Kong, W.; Shi, C.; Hu, Y. MMC-Based SRM Drives With Decentralized Battery Energy Storage System for Hybrid Electric Vehicles. IEEE Trans. Power Electron. 2019, 34, 2608–2621. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, Control, and Applications of the Modular Multilevel Converter: A Review. IEEE Trans. Power Electron. 2015, 30, 37–53. [Google Scholar] [CrossRef]
- Gao, F.; Gu, X.; Ma, Z.; Zhang, C. Redistributed Pulsewidth Modulation of MMC Battery Energy Storage System Under Submodule Fault Condition. IEEE Trans. Power Electron. 2020, 35, 2284–2294. [Google Scholar] [CrossRef]
- Simone, D.D.; Piegari, L.; Tricoli, P.; Arco, S.D. Windowed PWM: A Configurable Modulation Scheme for Modular Multilevel Converter Based Traction Drives. IEEE Trans. Power Electron. 2020, 35, 9727–9736. [Google Scholar] [CrossRef]
- Ashourloo, M.; Zaman, M.S.; Nasr, M.; Trescases, O. Opportunities for Leveraging Low-Voltage GaN Devices in Modular Multi-level Converters for Electric-Vehicle Charging Applications. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018—ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 2380–2385. [Google Scholar]
- Li, N.; Gao, F.; Yang, T.; Zhang, L.; Zhang, Q.; Ding, G. An integrated electric vehicle power conversion system using modular multilevel converter. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 5044–5051. [Google Scholar]
- Siemaszko, D.; Antonopoulos, A.; Ilves, K.; Vasiladiotis, M.; Ängquist, L.; Nee, H. Evaluation of control and modulation methods for modular multilevel converters. In Proceedings of the 2010 International Power Electronics Conference—ECCE ASIA, Sapporo, Japan, 21–24 June 2010; pp. 746–753. [Google Scholar]
- Omar, A.; Wood, A.; Laird, H.; Gaynor, P. Simplified SOC Balancing of an MMC with Embedded Storage in an EV System. In Proceedings of the TENCON 2021, IEEE Region 10 Conference (TENCON), Auckland, New Zealand, 7–10 December 2021; pp. 929–934. [Google Scholar]
- Zhang, Y.; Ge, Q.; Zhang, R.; Du, Y. The control of arm currents and the parameters for modular multilevel converters. In Proceedings of the 2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 21–24 October 2012; pp. 1–6. [Google Scholar]
- Sixing, D.; Apparao, D.; Bin, W.; Navid, Z. Modular Multilevel Converters: Analysis, Control, and Applications; IEEE: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Ma, S.; Jiang, M.; Tao, P.; Song, C.; Wu, J.; Wang, J.; Deng, T.; Shang, W. Temperature effect and thermal impact in lithium-ion batteries: A review. Prog. Nat. Sci. Mater. Int. 2018, 28, 653–666. [Google Scholar] [CrossRef]
- Zhang, R.; Cardinal, M.; Szczesny, P.; Dame, M. A grid simulator with control of single-phase power converters in D-Q rotating frame. In Proceedings of the 2002 IEEE 33rd Annual IEEE Power Electronics Specialists Conference, Cairns, Australia, 23–27 June 2002; Volume 1433, pp. 1431–1436. [Google Scholar]
- Rzepka, B.; Bischof, S.; Blank, T. Implementing an Extended Kalman Filter for SOC Estimation of a Li-Ion Battery with Hysteresis: A Step-by-Step Guide. J. Energ. 2021, 14, 3733. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Power (W) | 7000 |
| Phase Voltage (V) | 230 |
| Arm Inductance (mH) | 0.60 |
| Frequency (Hz) | 50 |
| Rated current (A) | 30 |
| Number of SMs per Arm (N) | 56 |
| Rated SM voltage (V) | 7.2 |
| Battery capacity (Ah) | 20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Omar, A.; Wood, A.; Laird, H.; Gaynor, P. Single-Phase Charging of EV Embedded Batteries in an MMC with Submodule Override Capability. Energies 2022, 15, 2276. https://doi.org/10.3390/en15062276
Omar A, Wood A, Laird H, Gaynor P. Single-Phase Charging of EV Embedded Batteries in an MMC with Submodule Override Capability. Energies. 2022; 15(6):2276. https://doi.org/10.3390/en15062276
Chicago/Turabian StyleOmar, Alaa, Alan Wood, Hamish Laird, and Paul Gaynor. 2022. "Single-Phase Charging of EV Embedded Batteries in an MMC with Submodule Override Capability" Energies 15, no. 6: 2276. https://doi.org/10.3390/en15062276