1. Introduction
In recent years, the development of renewable energies has accelerated with the aim of reducing the share of electricity production that is carried out by means that emit high levels of greenhouse gases, such as gas-fired power stations or, even worse, those using coal [
1,
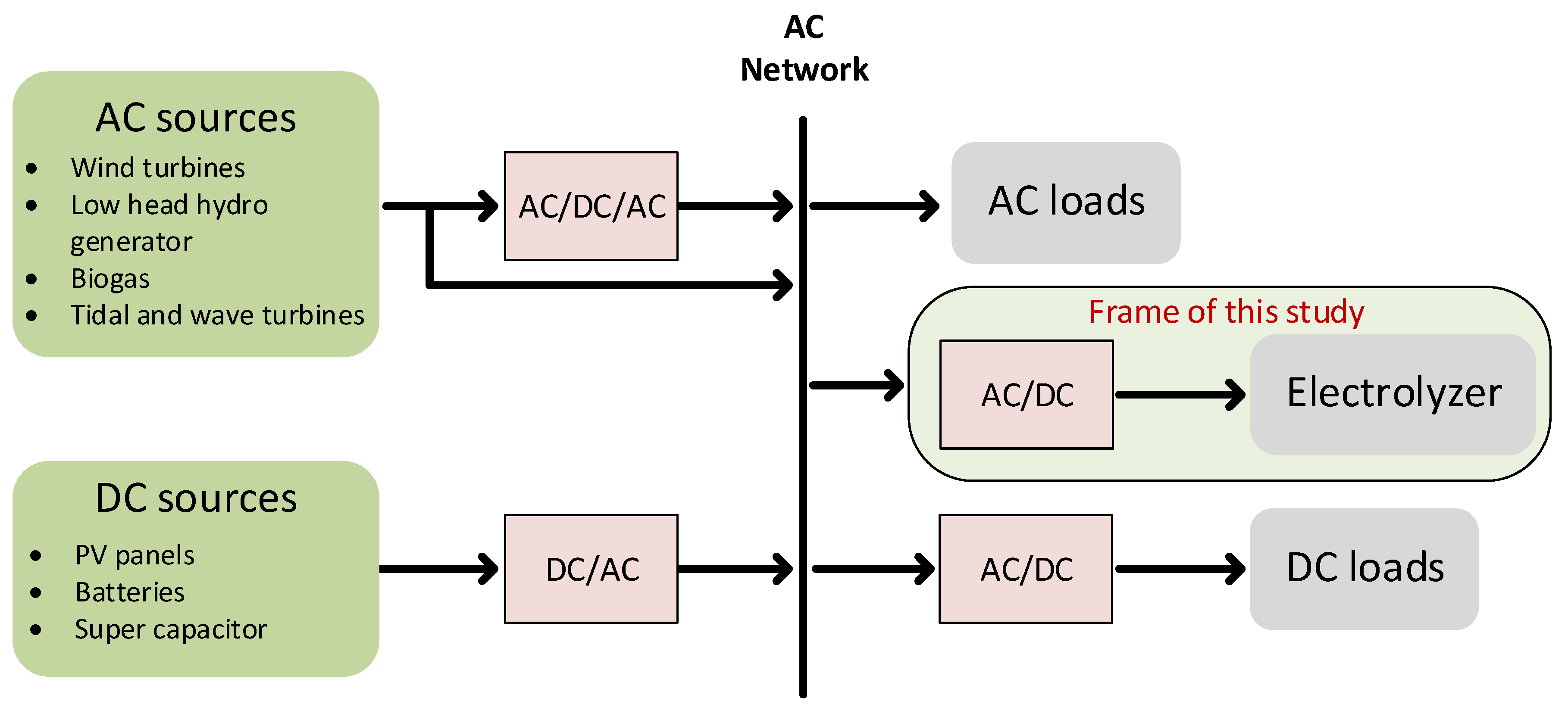
2]. In this study, we will consider the context of AC microgrids, in which there are several sources of renewable energy and several loads (
Figure 1). The AC network has been used as the standard choice for energy transmission systems since the 19th century for its many advantages such as [
3]:
The renewable energy sources are, by nature, intermittent and it is, therefore, difficult to balance energy production with consumption when the share of renewables in the energy mix is significant. To compensate for the intermittency of these sources and the fact that their production cannot be controlled, ESSs are a true solution [
4]. Among the different types of ESSs, it is possible to highlight two categories: those using batteries [
5] and those using hydrogen production by water electrolysis [
6]. In the following, we will consider the case that consists of converting the excess electricity production into hydrogen by water electrolysis [
7].
This solution allows for the maintenance of the grid frequency, even in the case of low power demand. Hydrogen production based on renewable energy or low-carbon power is called green hydrogen. It has significantly lower carbon emissions than grey hydrogen, which is produced by the steam-reforming of natural gas, which constitutes the bulk of the hydrogen market [
8]. Green hydrogen appears to be an attractive energy vector to reduce the carbon footprint of the transportation sector and industrial processes. Unfortunately, due to the high cost of production, green hydrogen represents less than
of total hydrogen production [
9].
To convert the excess electricity production into hydrogen, it is necessary to use a converter connected to this AC microgrid to feed the electrolyzer. A state-of-the-art representation of the conversion structures is presented in [
10]. Most topologies can be classified into four main categories, which are presented in
Figure 2, among which three of them consider controlled converters.
Currently, thyristor-based solutions are the most widely used in industrial applications [
11,
12], especially in electrolysis, due to the necessity of high current generation to supply high-power electrolyzers. However, the use of thyristors implies the generation of reactive power, which dramatically reduces the power factor. In addition, the output current ripple is quite high, which leads to an increase in energy consumption [
13,
14].
The second category is a combination of the rectifier with a DC chopper. It avoids the use of passive filters as it can improve the power quality. It is important to combine new emerging DC-DC converters with power management strategies to improve the energy efficiency and the hydrogen flow rate [
15].
The third category is the pulse-width modulation (PWM) current-source rectifiers (CSR). They appear as attractive topologies regarding the power quality and their dynamic behavior, even if they seem to be limited to medium-voltage applications to maintain good efficiency, which is in the scope of the application [
16].
In this study, the CSR is used to interface the electrolyzer with the grid. To control an electrolyzer, two ways are possible: either impose the voltage or the current. Since the current control, in the case of a cell malfunction, leads to an increase of the electric potential at the cell terminals which may irreversibly damage the cell, the choice was made to use a rectifier that allows one to control the voltage at the electrolyzer terminals. It improves the durability of the systems, especially in the case of cell aging.
As the hydrogen production rate is directly linked to the current flowing through the electrolyzer, it is necessary to use a converter that provides high currents for (relatively) low voltages. Since the typical voltage of a cell is about 1.8 V, and as a classical stack contains 100 of these cells in series, the voltage is about 180 V, whereas the current is about 1000 A. To link the electrolyzer to a classical US grid AC network, the use of a three-phase buck is suggested here, since it is a suitable option for applications that require a lower DC output voltage than the AC mains. The topology has already attracted the attention for different applications such as wind energy conversion systems [
17] and on-board electric vehicle chargers [
18,
19]. This topology is becoming more attractive for motor-drive applications. The classical topology is used in [
20], while a novel one is presented in [
21] to improve the reliability. Commutation methods in current source inverters (CSI) that use four-quadrant switches are presented in [
22] to improve the efficiency compared to conventional CSI with series power diodes.
The classical topology of a buck-type rectifier is studied here because it is a fair compromise between good performance and a low number of semi-conductors to achieve the step-down function. In a single conversion stage, this converter allows one to adjust the output DC voltage, while ensuring a sinusoidal grid current in phase with the main phase voltage [
23].
The classical control deals only with output variables of the converter at the price of grid current oscillations, which are undesirable for AC microgrids. The presence of oscillations inside the grid current is explained by the resonance of the
filter excited by the harmonics generated by the switching of the transistors. These oscillations are traditionally reduced with damping methods [
24]. The proposed synthesis naturally integrates the presence of the input filter and guarantees the stability of the system for all operating points.
The improvement of the control that is proposed here is a stategy based on the control of input and output variables at the same time, in order to directly control grid current oscillations without the need of damping methods. As the proposed control method is based on an approach using the flatness properties of differential systems, it also ensures the large-signal stability of the converter.
The paper is organized as follows:
Section 2 describes the operation principle and the modeling of this converter;
Section 3 details the proposed control to improve the converter performance;
Section 4 deals with the sensibility analysis; and, finally,
Section 5 and
Section 6 display a simulation and experimental results to validate the proposed solution.
2. Operation Principle and Modelisation
2.1. Instantaneous Model
The topology is based on an unidirectional CSR with six transistors in series with six diodes to ensure a bidirectional voltage blocking capability. The harmonics injected by the buck rectifier into the microgrid are reduced by an input differential mode filter.
One of the advantages of this topology is the absence of a high start-up current and the naturally induced protection under legs short circuit [
25]. Due to the presence of an inductance
at the output, the current is approximately constant.
At each time, only one high-side SiH and one low-side SiL switch have to be turned on. If, simultaneously, more than one switch is conducting at the upper side or at the lower side, the state of their series diode will be defined by the sign of the phase-to-phase voltage associated with the two bridge legs. Due to voltage ripple and the fact that at each sector crossover, the line voltage is equal to zero, this can lead to the series diodes turning on simultaneously. This generates a distortion of the grid current [
26].
A freewheeling diode,
, is added: without any command on the switches, the DC output voltage is zero. This functionality could be performed by short-circuiting a leg, but at the price of higher switching losses (the pattern would contain a higher number of vectors), and higher conduction losses (the current would flow in a higher number of semiconductors) [
27]. The freewheeling diode,
, also ensures the continuity of the current inside the output inductance,
. It is conducting when all switches are open. If the switches S1H and S2L (shown in
Figure 3) are conducting, the output current,
, flows from phase
a and returns back into phase
b.
In this case, the line-to-line voltage
is applied to the output. The maximum output voltage of this converter is [
27]:
where
is the power factor and
the grid nominal line voltage. To get the maximum achievable output voltage, the rectifier has to operate at a unity power factor; that is to say that grid current and phase voltage have to be in phase. In this case, the reactive power generated by the
input filter is totally compensated.
To establish the time varying differential equations of the converter, the boolean switching variables SiH and SiL are considered with
(1 value for a closed switch, 0 when open). They can be put in a vector form:
The equations of this converter can be written as follows (where the exponent
T stands for the transpose):
As this model uses boolean switching variables, it requires the Space Vector Modulation (SVM) part to determine the dynamics of the converter. Unfortunately, adding this part makes the model more difficult to implement and leads to an increase of the computer simulation time; the characteristic time of the switches is far lower than the time constants of the other variables. This is why it is preferable to work with an average time model in which all variables are replaced by their average values computed over a switching period T.
2.2. Space Vector Modulation
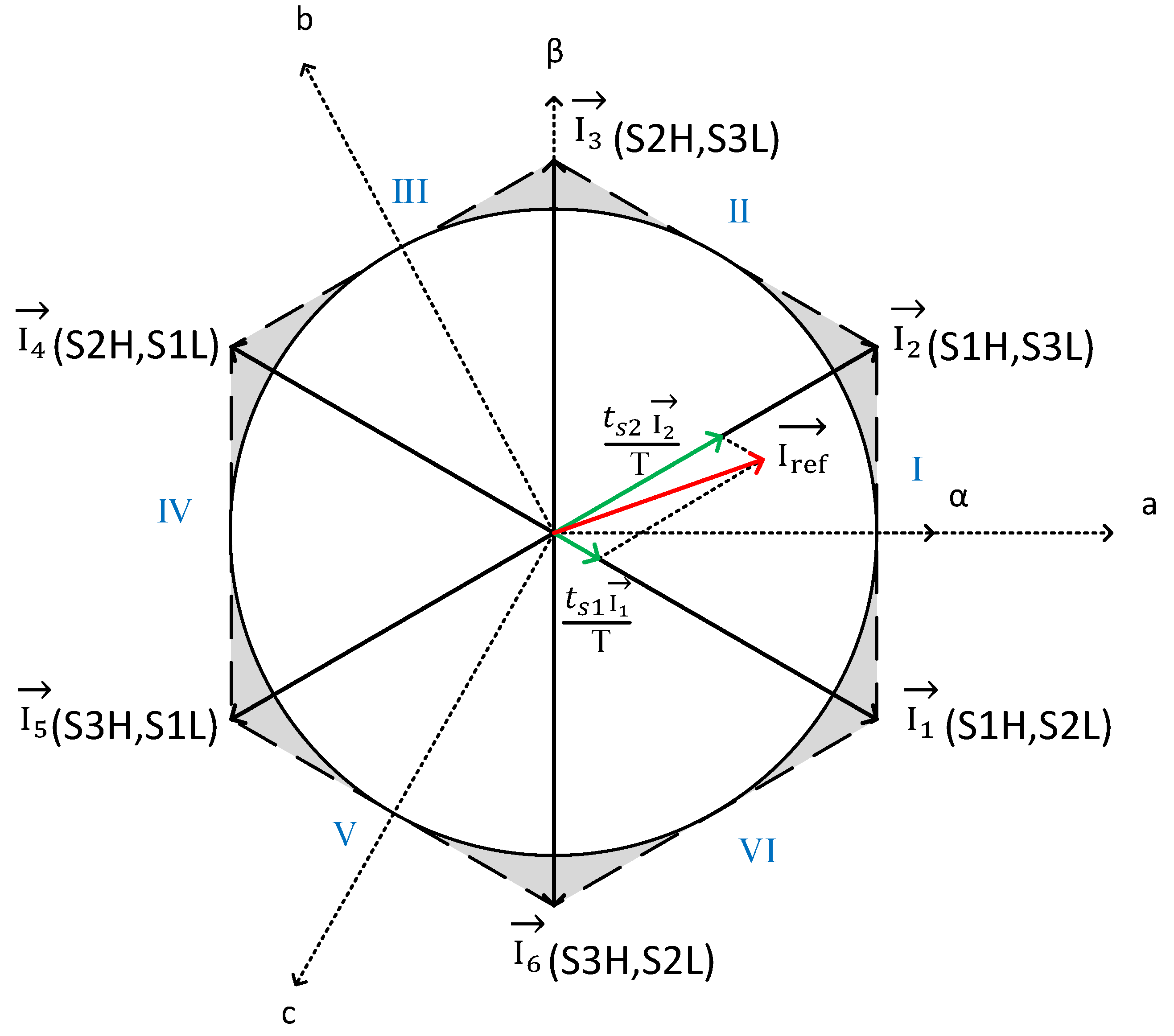
The SVM technique consists of controlling the reference vector in the frame in which the converter generates only six active current vectors, with each vector being a combination of different active switches. With six switches, and two states for each switch (open or closed), we have theoretical possibilities; however, due to the operating conditions stated above, there are six active vectors and four zero vectors. The zero-state vector will be performed here by the opening of all the switches, thanks to the freewheeling diode .
The importance of the modulation scheme has been studied in [
28] and an overview has been presented in [
29]. Since the study of the modulation scheme is not the scope of this article, the choice was made to use the six-sector Modified Full wave Symmetrical Modulation (MFSM) scheme (
Figure 4) to facilitate its practical implementation into the FPGA. The change of sector is eased since the zero-state vector is used on both neighboring sectors. Next, the FPGA will generate the command for the drivers of the switches.
An SVM is decomposed in three steps:
- 1.
Identify in which sector the reference vector is;
- 2.
Compute the application times of adjacent vectors and the zero-state vector during a switching period T;
- 3.
Choose the modulation sequence during a switching period.
The six vectors shown in
Figure 5 correspond to an unique combination of the six switches. For example, the vector
corresponds to the following combination:
If we directly use these vectors, we are in the full-wave command. To control the reference vector
in phase and magnitude, a temporal aspect has to be added: this is the Pulse Width Modulation (PWM). To apply the reference vector, we build an average vector that results from the association of two adjacent vectors,
, and one zero-state vector,
, whose order of application depends on the selected pattern. In
Figure 5, the area of application of the reference vector that corresponds to the circle inscribed inside the hexagon can be seen. Each active vector has a modulus equal to:
The maximum modulus for the reference vector is:
The modulation index,
M, is defined by the ratio between the reference vector modulus and its maximum:
Its value is between 0 and 1.
2.3. Average Model
The source phase voltages are assumed to form a direct balanced system:
To get almost constant variables, Concordia and Park transformations are performed to move from an
abc to a
dq frame. The transformations of the variables
X are done as follows:
The phase voltages are in the Park’s reference frame and .
Using (4a) and (
9), the grid current equation becomes:
The instantaneous expression averaged during one switching period of the input current of the rectifier in
frame can be obtained using:
This allows us to define:
Using (
12) and (
13), the AC capacitor voltage equation becomes:
The governing equation of the output current,
, is:
Therefore, it is possible to write the equation as a power balance between the input and the output of the converter, where
corresponds to the reference of active power consumed by the rectifier.
This leads to the following system of differential equations:
This formulation allows one to work with the reference vector , where its components and are the control variables of the active power and the reactive power consumed by the converter, respectively.
As the model only needs values for in a state-space model, its simulation is faster than the whole model with the SVM part.
5. Simulation Results
Table 1 and
Table 4 display the control parameters which will be used for the simulation and experimental tests.
Table 3 shows the parameters of the buck-type current-source rectifier used in the simulation and the experimental tests.
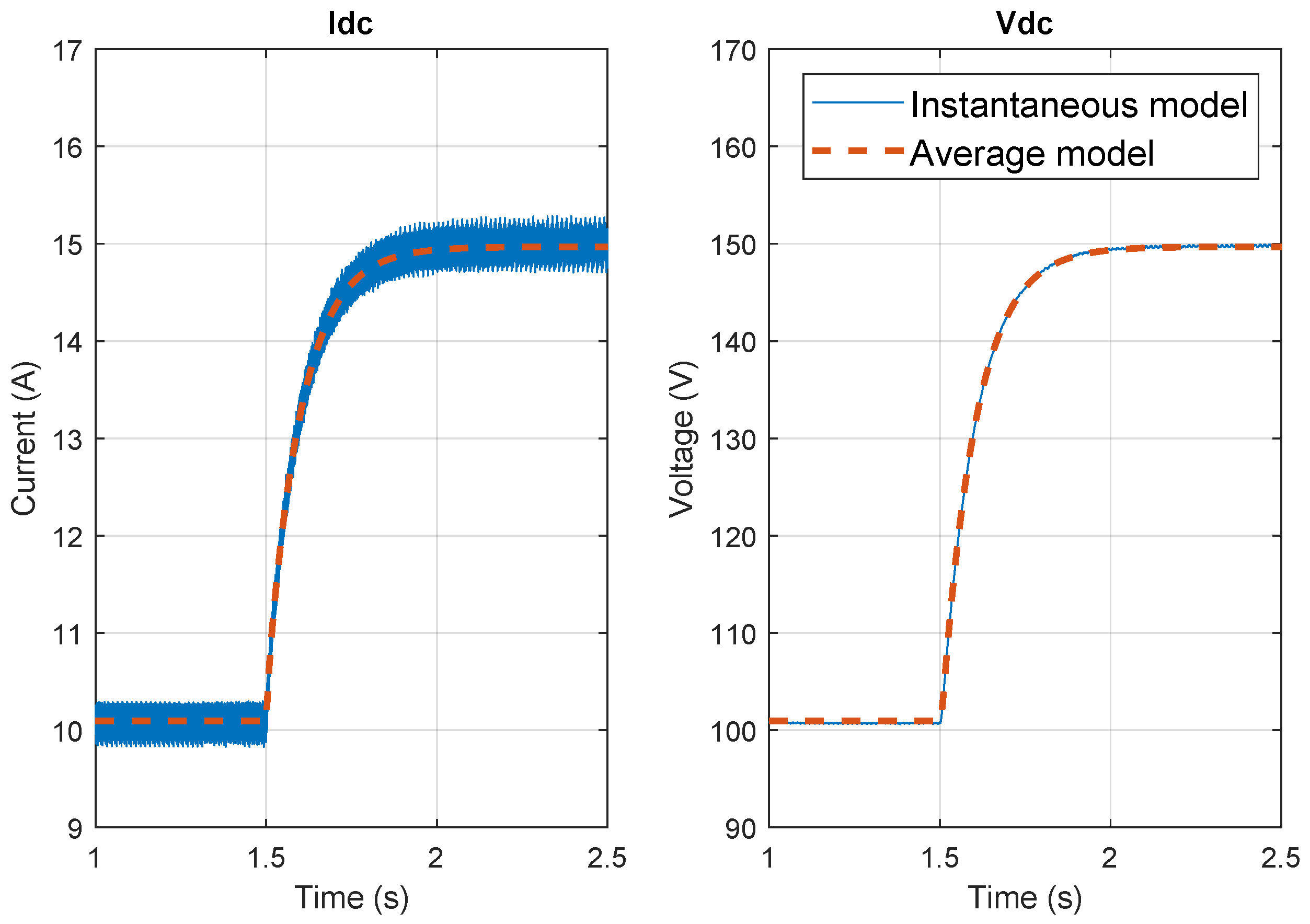
In
Figure 8, the simulation of the instantaneous model with SVM and the one of the average models are carried out, when the system is in an open loop (meaning that the values for both control variables
and
are set directly). Both simulations show the same dynamic behavior, which validates the approximation of the average model.
To ensure good continuity of service of the electrolyzer, the DC-output voltage of the rectifier has to be maintained as much as possible during a sudden voltage drop of the network. The simulation (using the average model) of the system during a drop of the rms grid voltage (reduction from 55 V to 40 V) is displayed in
Figure 9 and
Figure 10 for an electrolyzer with 25 cells in series (2 V at the terminals of each cell).
Figure 11 shows the system behavior for grid voltage reduction from 110 V to 90 V for an electrolyzer with 50 cells in series (2 V at the terminals of each cell). The system remains stable during the disturbance: this one is removed quickly after 50 ms. There is a transient voltage drop on the DC system of about 5 V in both cases, followed by a minor overvoltage. The DC current oscillation is about 1A in both cases.
Figure 10 displays the influence of the value of the control parameter
on the output voltage
. It can be seen that the higher the value of
is, the faster the disturbance is removed. In addition, it is important to notice that a high value of
generates a lower voltage drop.
A simulation is performed to compare the classical control using two cascaded PI controllers with and without the presence of an active damping method with the proposed solution. PI controllers can be written as follows for the current and voltage loops:
The active damping method used consists of emulating a damping resistor, without any additional power loss by making the CSR produce an additional current added to the reference current of the d axis (
). It is based on the voltage measurement across the AC capacitor. After using a high pass filter to keep only the alternative part, the obtained voltage is divided by the virtual resistor to generate the damping current [
34].
The points of comparison will be: the magnitude of the oscillations on the grid current in steady state and the performances under disturbances generated by a resistive load whose value is changed from to . The two controllers are tuned to obtain the same bandwidth in a closed loop in each case. Two cases are presented with each control corresponding to different settings: one is relatively slow (cutoff frequency of the voltage loop is 85 rad·s) and one is relatively fast (cutoff frequency of the voltage loop is 175 rad·s.
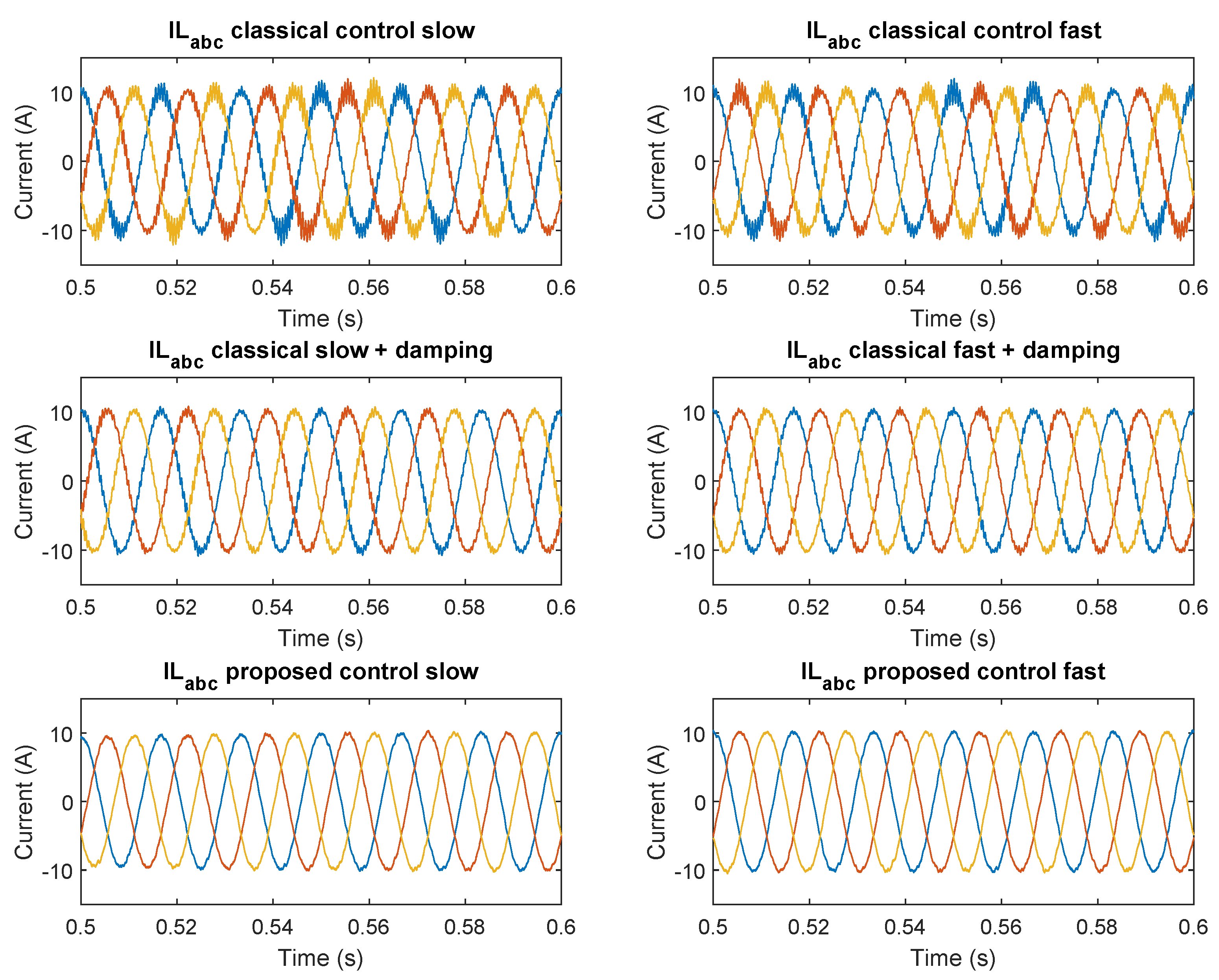
In
Figure 12, it is possible to see the grid current in steady state with: the classical control without an active damping method (top), the classical control with an active damping method (middle), and the proposed control (bottom). Converter parameters are listed in
Table 3 with a voltage grid at 110 V and a resistive load of
. Control parameters are listed in
Table 1 and
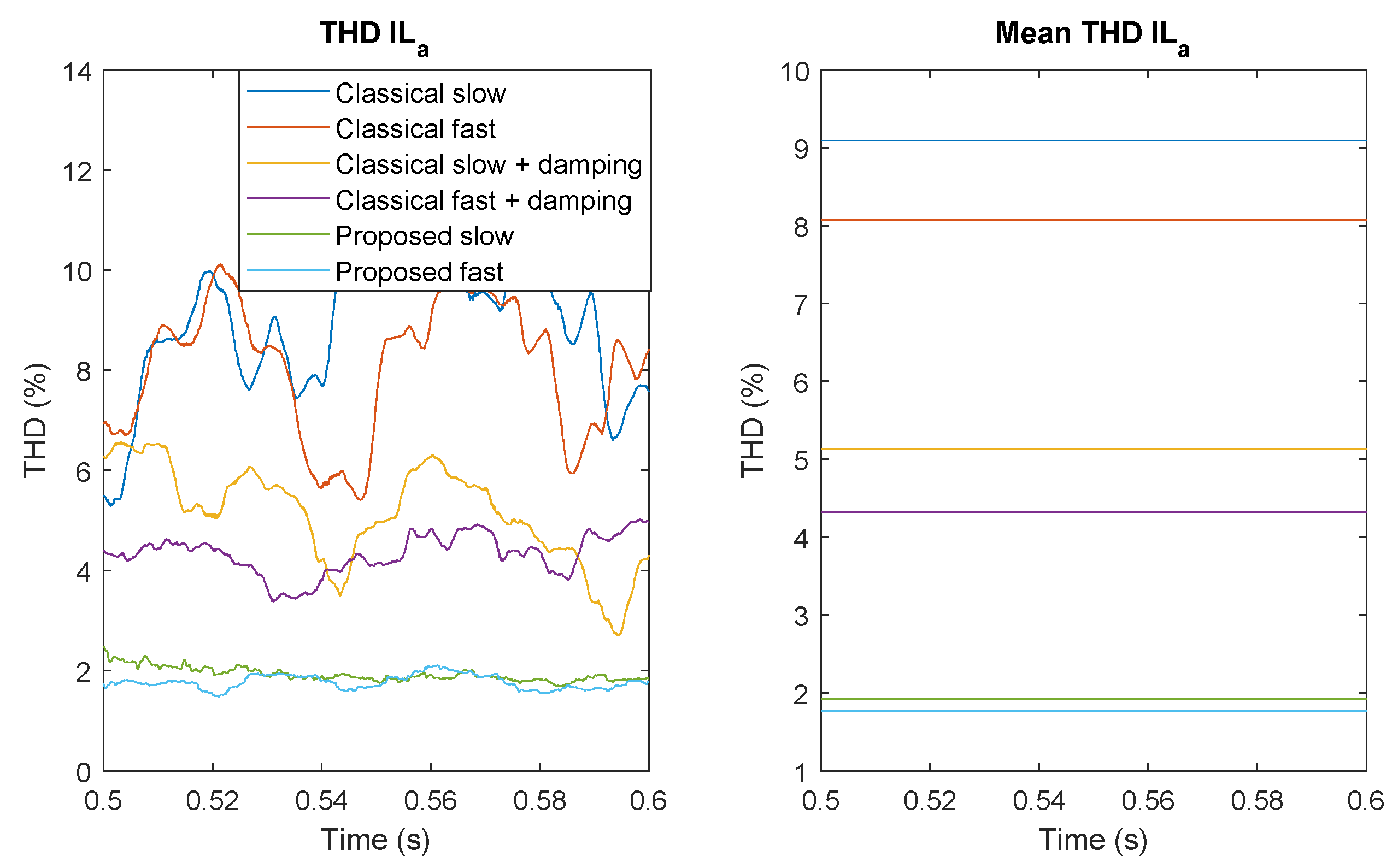
Table 4. Controllers are tuned to be slow on the left side and fast on the right side. It is possible to highlight that the presence of an active damping method reduces the magnitude of oscillations (from 3A to 1A) compared to the solution without. However, the proposed control shows a greater reduction of the magnitude of oscillations (from 3 A to 0.15 A). In addition, to highlight this result, the Total Harmonics Distorsion (THD) has been computed in the different cases and presented in
Figure 13. It appears that the proposed solution has the lowest THD value of the grid current.
The behavior of the system subjected to a sudden change of the load has been tested. A comparison between the classical control with and without the active damping method is first presented in
Figure 14. This figure confirms that the introduction of the damping method does not affect the dynamic behavior of the control. Next, a comparison between the classical and the proposed control is given in
Figure 15. The classical and the proposed solutions are compared in two cases depending on the tuning of the control parameters. One case is considered as slow and the other as fast.
In the first case where the controllers are slow, the overvoltage on is reduced from 50 V to 30 V with the proposed solution. Additionally, the voltage drop with the classical control is about 10 V when there is no voltage drop with the proposed control. Regarding the output current, , there is a current drop of about 1.5 A with the classical control, while it is equal to zero with the proposed control.
In the second case where the controllers are faster, with the proposed control, the overvoltage on is reduced from 32 V to 22 V. Additionally, while there is no voltage drop with the proposed control, the voltage drop with the classical control is about 5 V. In this case, with the proposed control, the current drop on is not eliminated, but reduced from 1.5 A to 0.8 A.
From these results (resumed in
Table 5), it is then possible to see that in both cases (slow and fast), the proposed control shows better dynamic performances compared to the classical solution. Furthermore, it allows one to reduce the magnitude of the grid current oscillations, which leads to an improvement in the value of the grid current THD.
6. Experimental Results
In order to verify the proposed solution, a test bench has been set up as shown in
Figure 16.
It is first composed of a three-phase controllable AC source Chroma 61702. Second, a MicroLabBox DS1202 is used with Matlab/Simulink and ControlDesk to monitor the state variables of the system and compute the reference variables. Next, these variables are sent to a FPGA DE0-Nano, which is responsible for sending command signals to the semi-conductors using optical fibers. The FPGA has been programmed using Quartus software in VHDL language. Finally, the system also includes an active load (EA Elektro-Automatik 9750-22) that can be controlled with analog inputs directly coming from the DAC port (Digital Analog Converter) of the MicroLabBox.
The quasi-static characteristic of an electrolyzer has been implemented in the active load. This characteristic allows us to emulate the behavior of a selected electrolyzer and establish the operating point according to the voltage imposed on its terminals. A typical characteristic of one cell is presented in
Figure 17: it displays the current density (A/cm
) as a function of the voltage (V) across the cell. A stack corresponds to an association between serial and parallel cells. In this study, the surface is selected at around 7 cm
with 50 cells in series for Test I and Test II, and 25 cells in series for Test III. The power extracted by the electrolyzer as a function of the voltage at its terminals is shown in
Figure 17. In order to extract the maximum power while maintaining the electrolyzer in good conditions, it was decided to apply 2 V to the terminals of each cell as an operating point for Test I and Test III. Another operating point has been tested with Test II, corresponding to 1.8 V to the terminal of each cell.
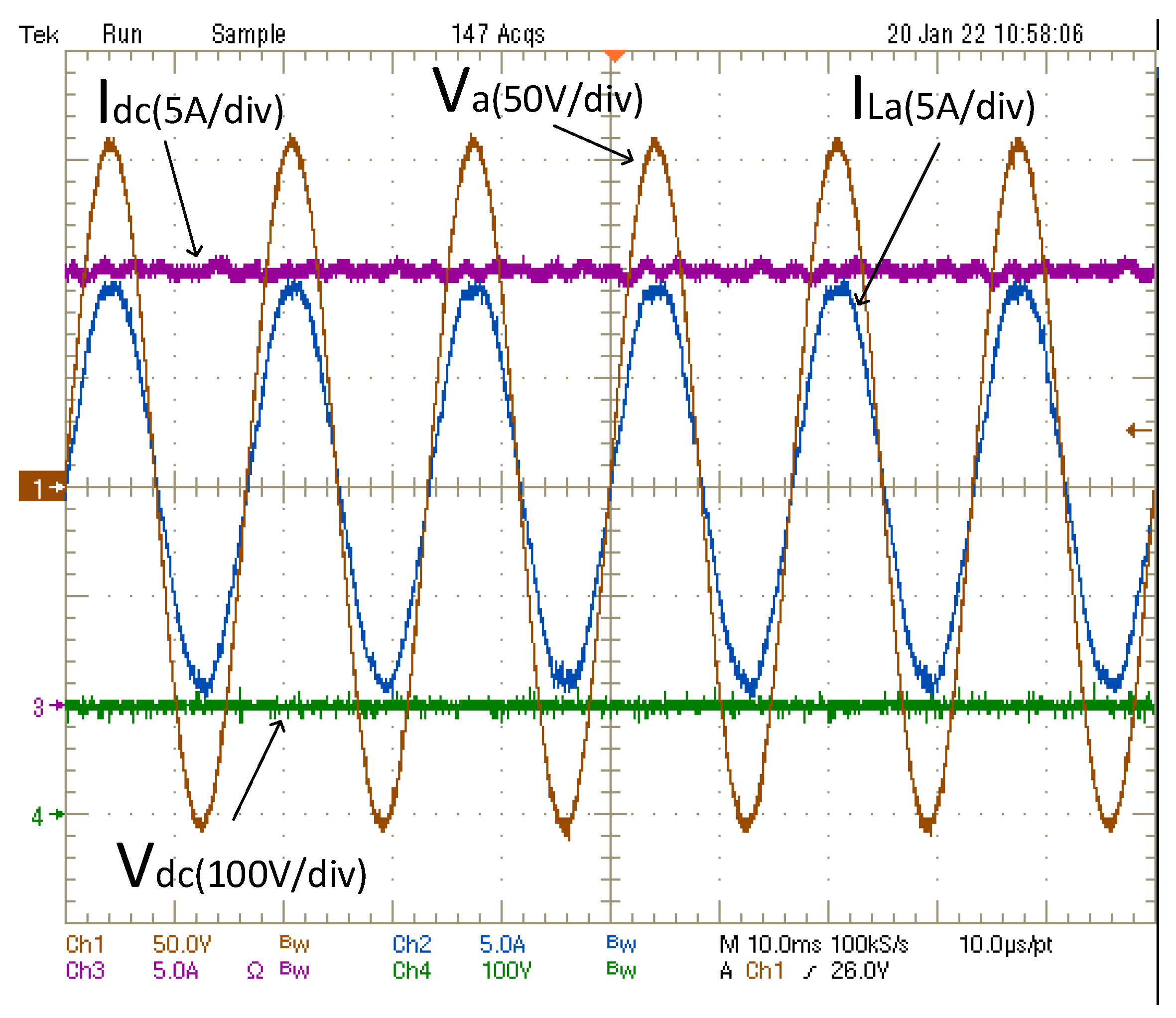
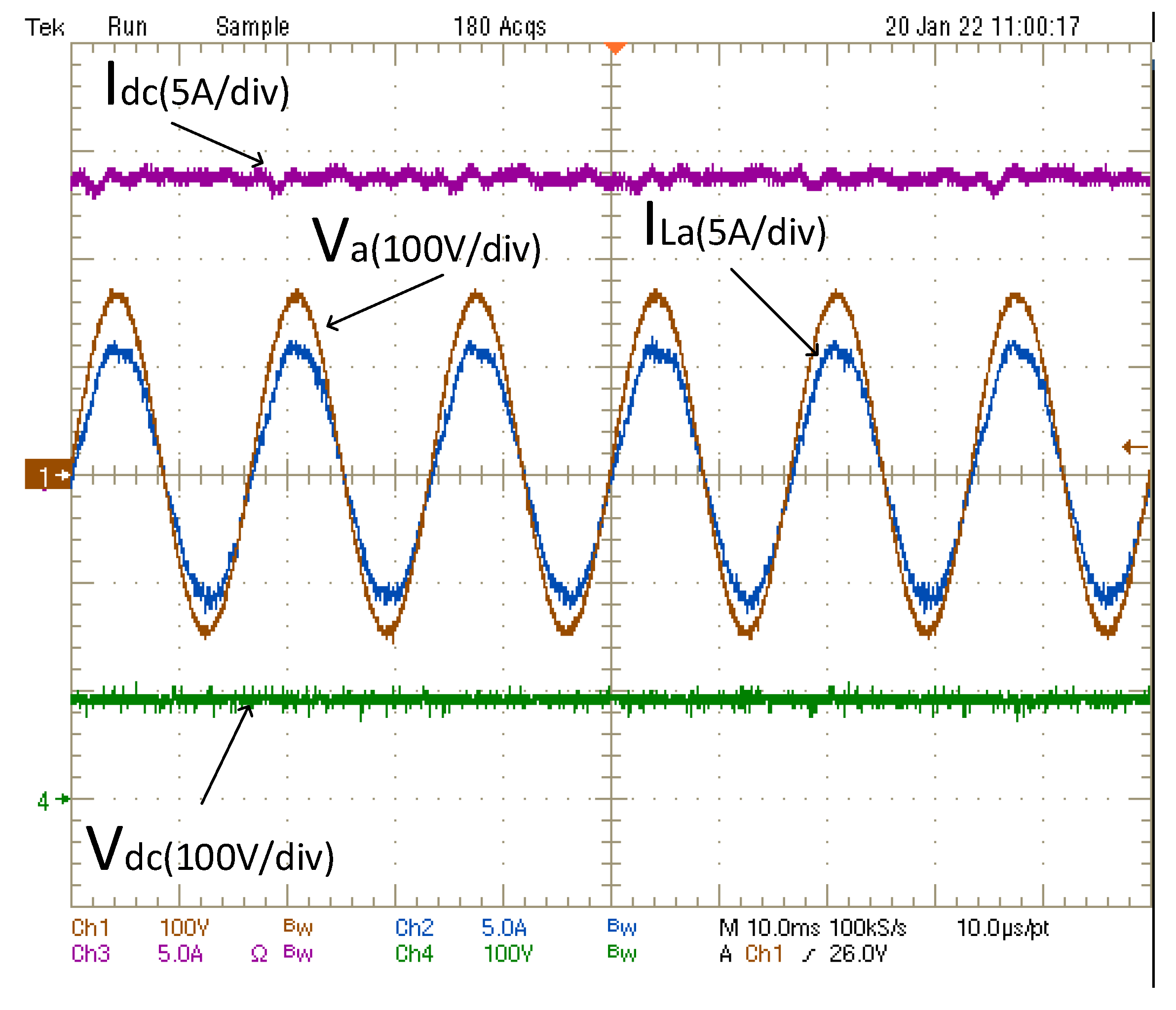
Figure 18 and
Figure 19 present the behavior of the system in steady-state with the proposed control during Test I and Test II. The parameters during these tests are indicated in
Table 1,
Table 2 and
Table 3. In these figures, it is possible to see the grid voltage
, the grid current
, the output current
, and the output voltage
. It can be seen that grid voltage,
, and current,
, are in phase. It means that the reactive power, coming in particular from the differential mode input,
, filter is totally compensated. The proposed control makes it possible to operate with a unit power factor. In addition, the oscillations on the grid current are damped using the proposed control without the need of any damping element or virtual active damping control.
Figure 20 displays the behavior of the system in a steady state with the proposed control during Test III. The parameters during this test are shown in
Table 1 and
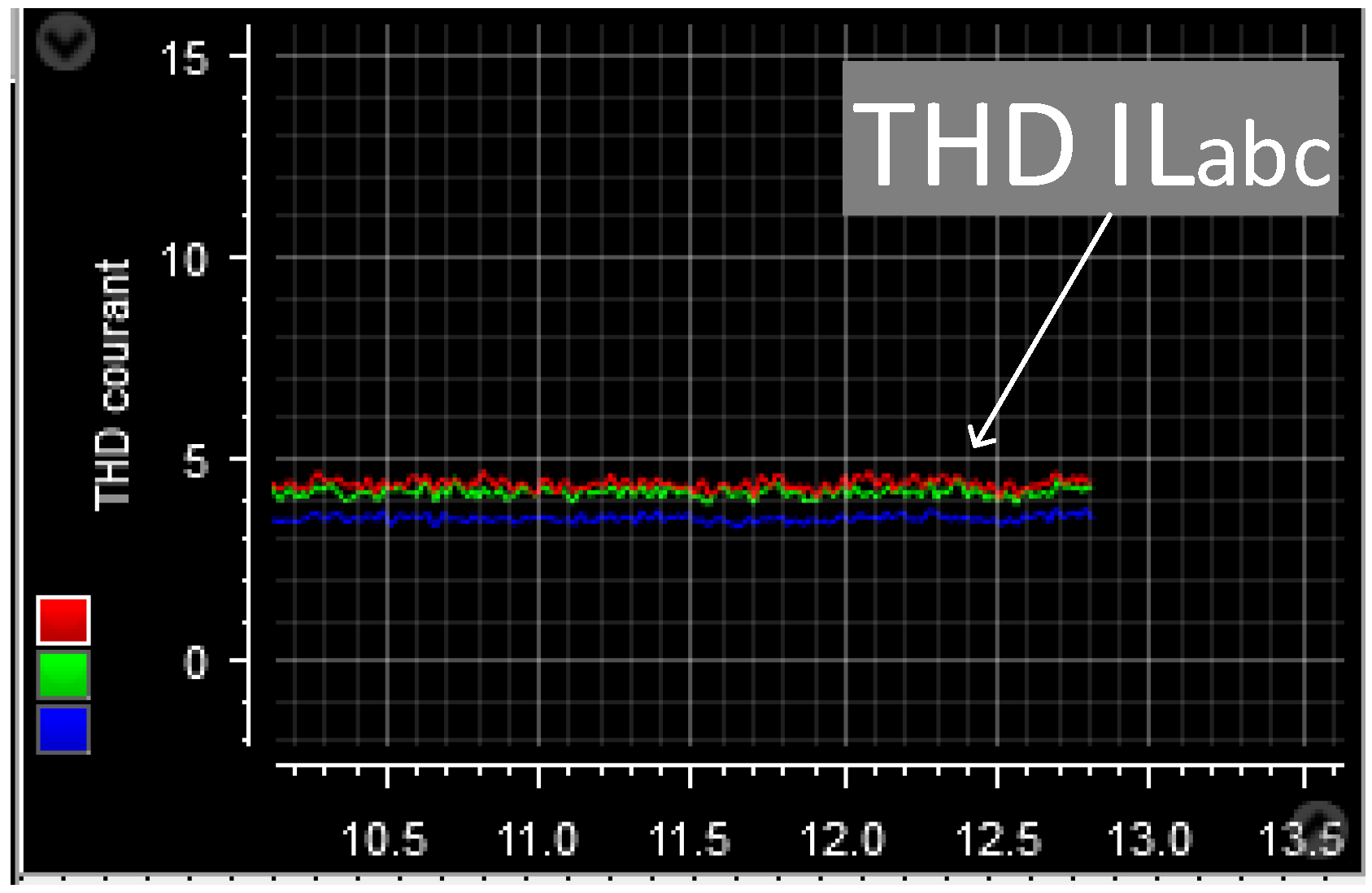
Table 2. We obtain the same results as in Test I and Test II: no oscillations on the grid current, grid voltage and current are in phase, and there are low ripples on the output current. In
Figure 21, it is possible to see the value of the THD of the grid current during the test. The definition chosen for the THD is the ratio between the amplitude of the harmonics and the fundamental value of the signal (Total Harmonic Distortion compared to the fundamental). Here, it is less than
, which indicates a grid current with very few disturbances in the network induced by the rectifier.
It is important, in order to guarantee a good continuity of service of the electrolyzer, to maintain the desired voltage at its terminals, for example during a micro-cut of the electrical network, i.e., during a sudden variation of its rms voltage. In order to study the response of the system during a sudden drop in the rms voltage of the network, Test III was carried out. In
Figure 22, it is possible to see the grid voltages,
, the output current,
, and voltage,
, during a sudden drop of the rms grid voltage from 55 V to 40 V with two different values of
. The system remains stable and the desired output voltage is maintained in both cases. Further, as in simulation (
Figure 9), it appears that a high value of
, allows one to reduce the voltage drop (7 V instead of 9 V) and removes the perturbation rapidly (50 ms instead of 100 ms).
The simulation corresponding to Test III was displayed in
Figure 9. The behavior of the system is similar between the simulation and experimental tests; for example, with
= 120 rad·s
, the DC transient voltage drop is about 7 V (5 V by simulation) and the current drop 1.25 A (1.2A by simulation). The DC current exceeding the set value is less than that in the simulation: it appears to be damped. It may be explained by modeling errors or a misidentification of parameters, but also the way in which the rms voltage drop is generated.
7. Conclusions
AC microgrids, composed of several renewable energy sources and several loads, need solutions to regulate the power produced as a function of the power consumed. To cope with the intermittency of these sources, ESS based on the electrolysis of water to produce hydrogen is a popular option. To improve the connection of the electrolyzer to the AC grid, the use of a single-stage conversion, three-phase buck-type rectifier has been evaluated.
First, an average model to model the rectifier has been described. Simulation times are faster than those of the instantaneous model (since it does not require the SVM part) without altering the system dynamics.
Next, we proposed a new control of this converter based on the flatness properties of the differential systems. It allows one to control the oscillations of the input filter without using active damping method and guarantees the large signal stability of the converter. The proposed solution is easy to tune, does not depend on the operating point, and presents better results regarding oscillation mitigation and dynamic performance than the classical control with active damping.
A simulation and experimental tests have been carried out to prove the efficiency of the solution. An active load has been used to emulate the electrolyzer, described by its quasi-static characteristic. In a steady state, the unitary power factor was achieved. Further, the THD of the grid current is kept low () during operation.
Finally, the behavior of the converter has been studied under a sudden drop of the rms grid voltage. We noticed that the converter remains stable and removes the perturbation quickly. This allows one to maintain the operating condition of the electrolyzer and guarantees a good continuity of service.
The proposed solution is a suitable one-stage conversion option to use the excess of electricity production to store hydrogen based on water electrolysis, to maintain a constant voltage at the terminals of the electrolyzer in the case of a grid disturbance, all while the grid current is stabilized with a unity power factor.


 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}