
Electrical Launch Catapult and Landing Decelerator for Fixed-Wing Airborne Wind Energy Systems
 ,
,  and
and 
Abstract
:1. Introduction
- Vertical launch with rotors;
- Rotational launch;
- Linear launch with onboard propellers;
- Winch launch without onboard propellers.
2. System Design and Model
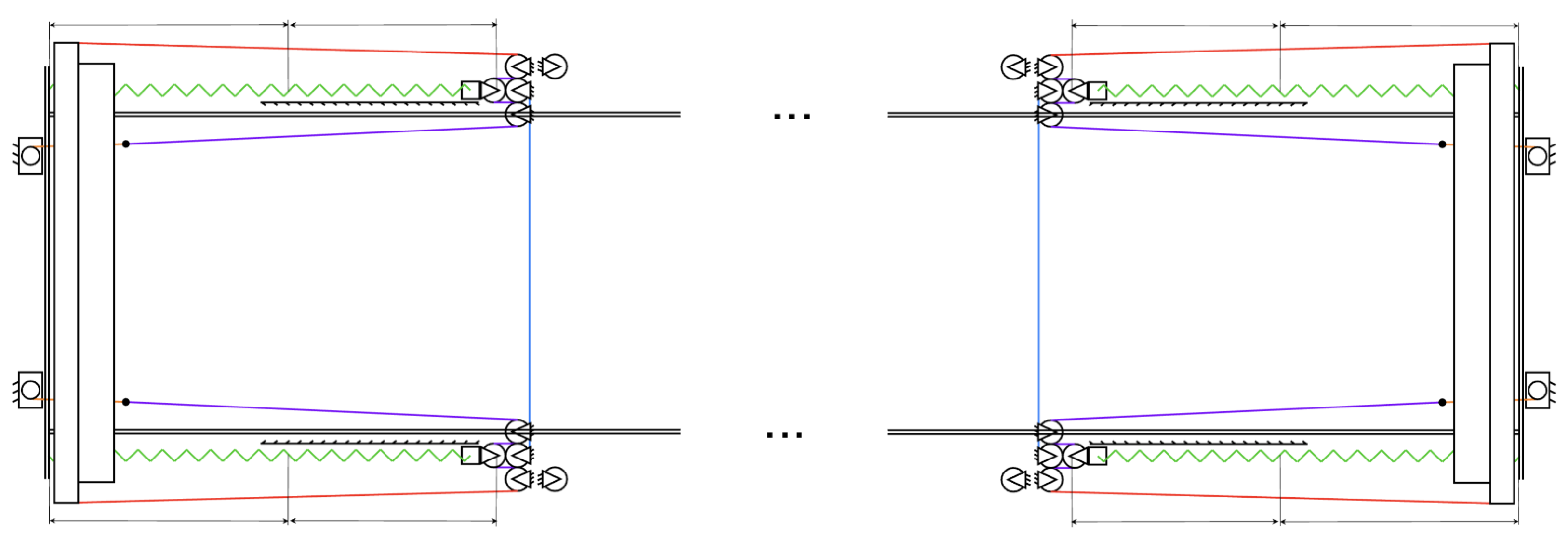
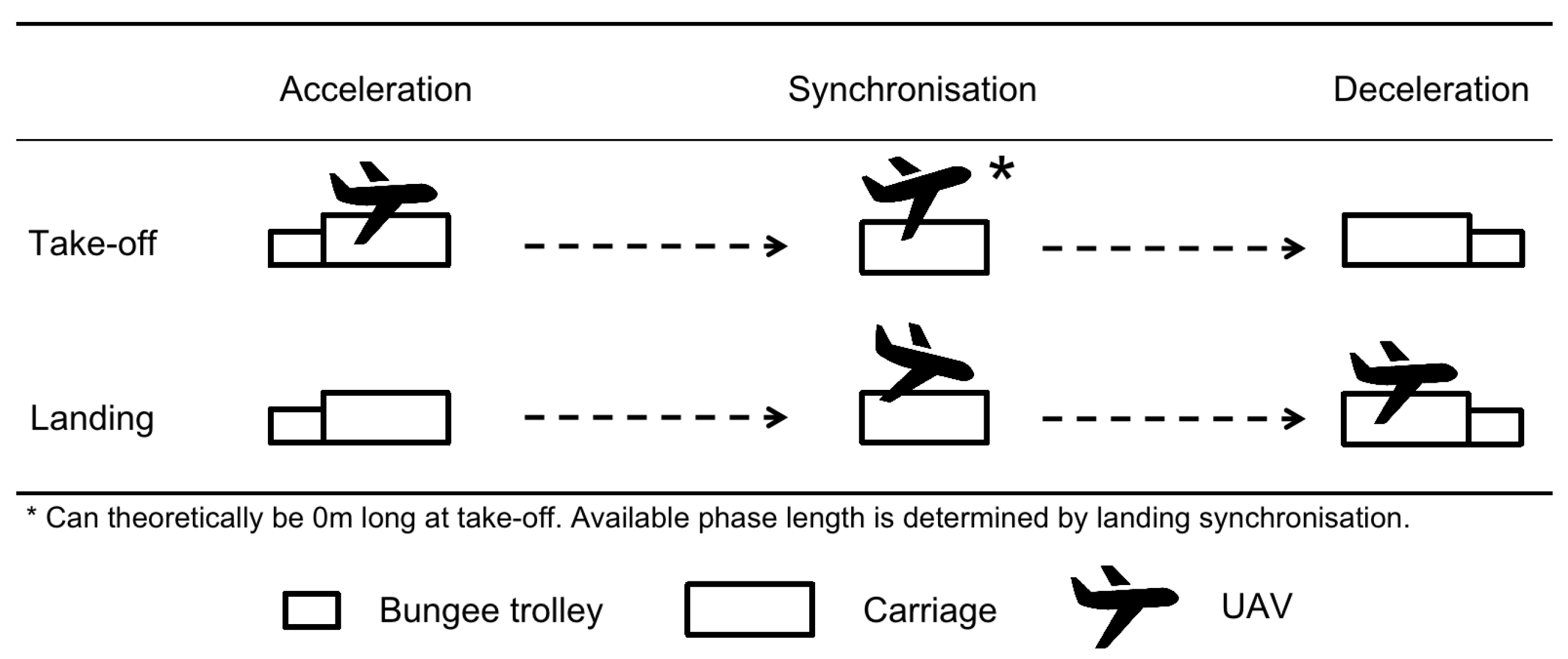
2.1. System Description
2.2. Mathematical Model
- The motor force is constant;
- The UAV thrust force T is constant during take-off and any thrust variations caused by increased ground- or airspeed during take-off are neglected;
- The impact of the UAV lift force on the normal force of the carriage N and thus, the respective friction force during take-off are considered;
- The aerodynamic drag force of the UAV is taken into account in additional to the drag force of the carriage when applicable. The airspeed is assumed for windless conditions and is equal to the velocity of the respective body relative to the stationary rail system;
- The UAV acceleration/deceleration is limited to 5 g to preserve structural integrity;
- Maximum carriage acceleration/deceleration (without the UAV connected to it) is limited to 10 g to preserve structural integrity;
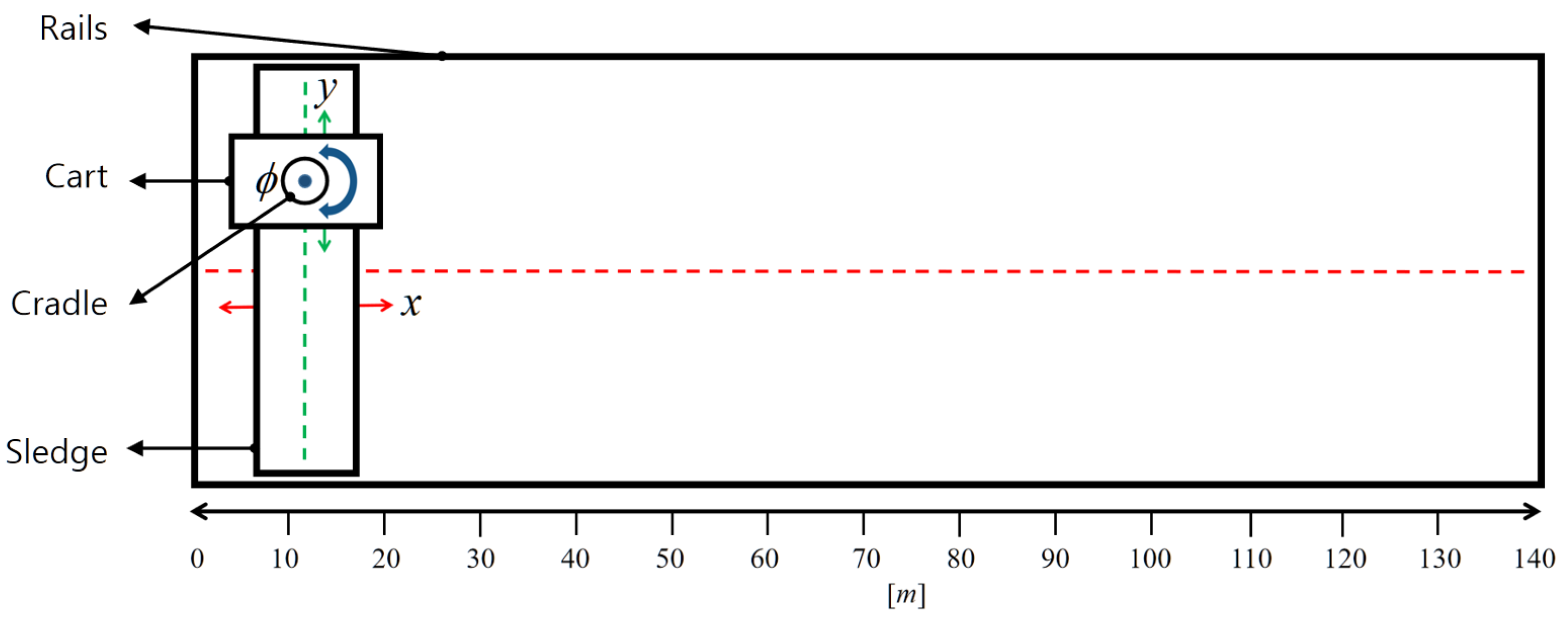
- The inclination angle of the non-elastic ropes is positioned relative to the horizontal system (Figure 8);
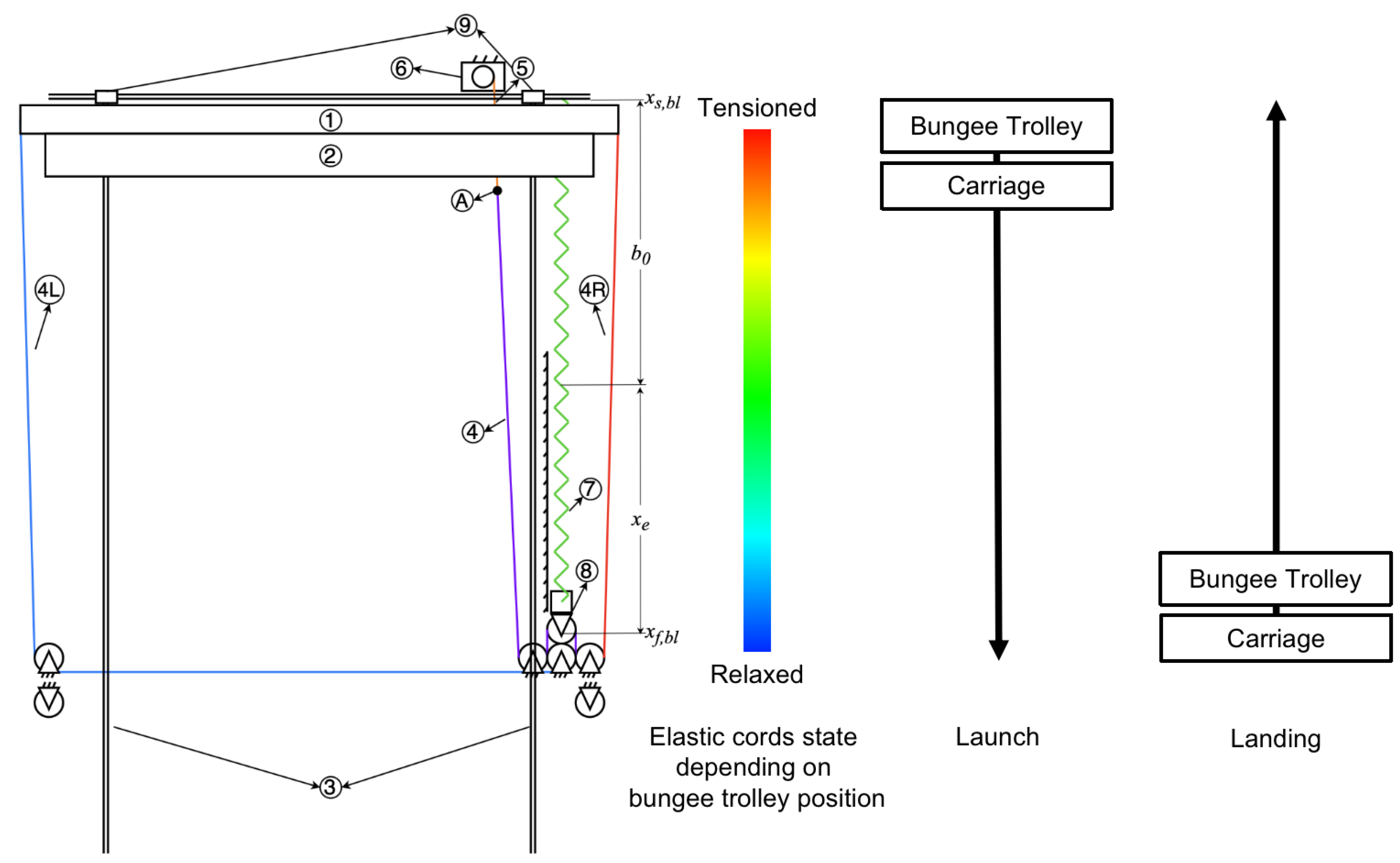
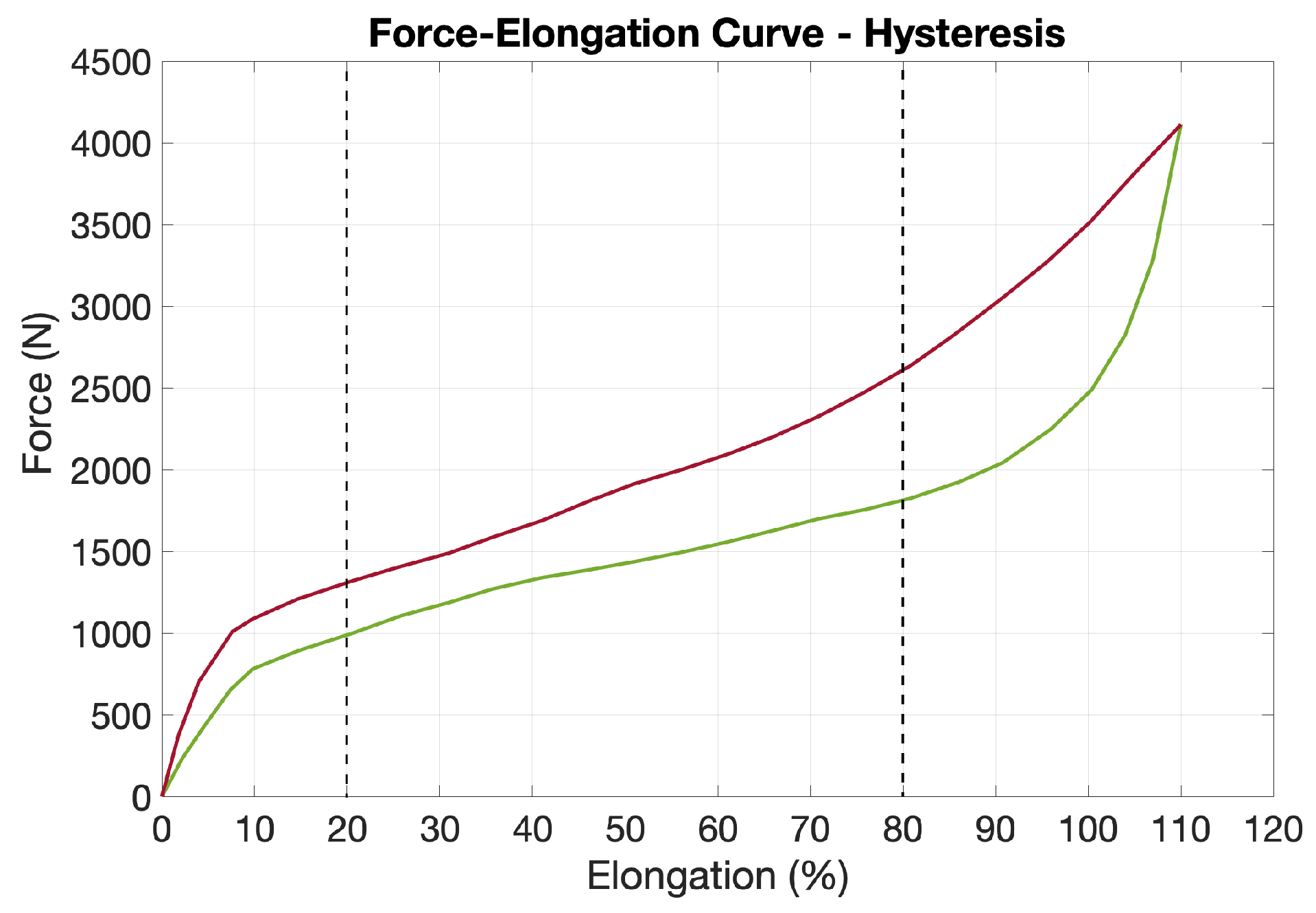
- The hysteresis of the elastic ropes results in a rebounding force is different from a stretching force ;
- The braking force is constant;
- The mass of the carriage , UAV and bungee trolley are taken into account when applicable;
- The rope winding over the pulleys, as well as electric friction disk motors, is assumed to be without slipping;
- Coupled bodies are treated as one body;
- The motors can operate at full power in the reverse direction and hence, ;
- The landing operation must incorporate a minimum synchronisation window of s as tolerance for the touchdown on the carriage;
- The take-off and landing velocities of the UAV are assumed to be 25 m/s.
- The mass of the elastic cords;
- The mass of the non-elastic ropes, pulleys and slider;
- Any friction forces in the bearings;
- The work of the friction force when the UAV slips off the carriage.
3. Results and Discussion
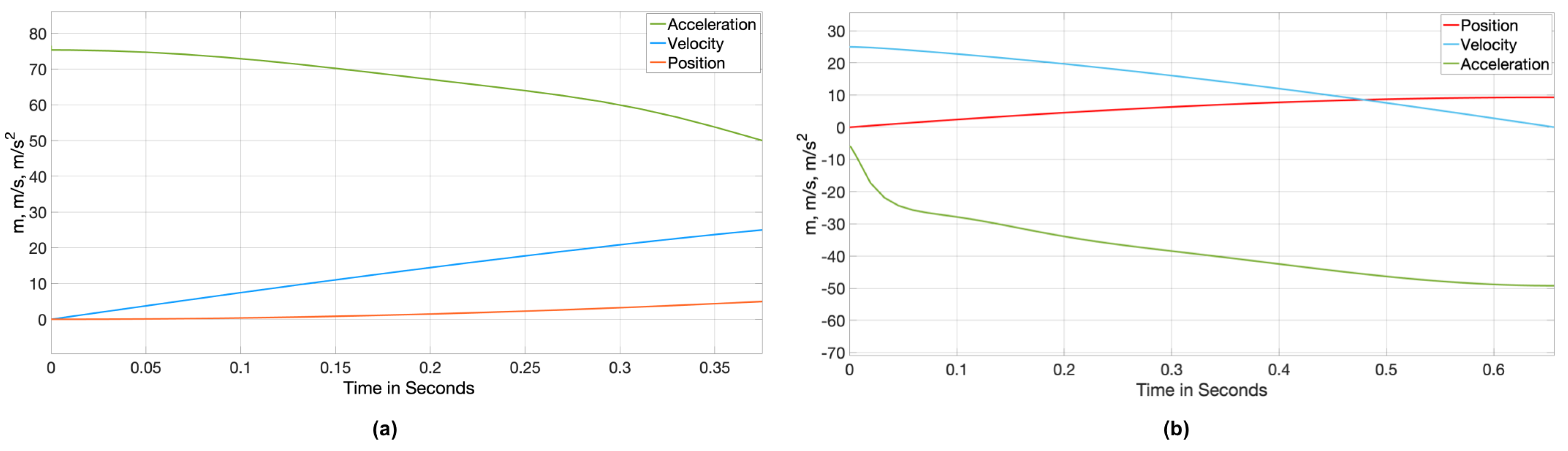
3.1. Results
3.2. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| UAV mass | |
| Carriage mass | |
| Bungee trolley mass | |
| Cross-sectional area of the carriage | |
| Aerodynamic surface of the wing | |
| Drag force coefficient of the UAV | |
| Drag force coefficient of the carriage | |
| Lift force coefficient of the UAV | |
| d | Vertical offset between the bungee trolley and pulleys |
| Rolling friction coefficient | |
| Air density | |
| Length of the elastic cords | |
| Number of BLLSs in parallel | |
| Number of elastic cords in parallel in a BLLS | |
| Percentage of initial elongation of the elastic cords | |
| Percentage of final elongation of the elastic cords | |
| e | Percentage of elongation of the elastic cords |
| Total distance travelled by the carriage during the launch acceleration phase | |
| Total distance travelled by the carriage during the launch deceleration phase | |
| Total distance travelled by the carriage during the landing acceleration phase | |
| Total distance travelled by the carriage during the landing deceleration phase | |
| Velocity change of the carriage during the launch acceleration phase | |
| Velocity change of the carriage during the launch deceleration phase | |
| Velocity change of the carriage during the landing acceleration phase | |
| Velocity change of the carriage during the landing deceleration phase | |
| Duration of the launch acceleration phase | |
| Duration of the launch deceleration phase | |
| Duration of the landing acceleration phases | |
| Duration of the landing deceleration phase | |
| Maximum acceleration rate reached by the carriage during the launch | |
| acceleration phase | |
| Maximum acceleration rate reached by the carriage during the launch | |
| deceleration phase | |
| Maximum acceleration rate reached by the carriage during the landing | |
| acceleration phase | |
| Maximum acceleration rate reached by the carriage during the landing | |
| deceleration phase | |
| Length of a BLLS | |
| Length of the acceleration BLLS | |
| Length of the deceleration BLLS | |
| Required ElektRail system length for landing | |
| Required ElektRail system length for launch | |
| L | Required ElektRail system length |
| Distance travelled by the carriage during the synchronisation window | |
| Velocity of the carriage during the synchronisation window | |
| Duration of the synchronisation window | |
| End position of the BLLS on the ElektRail and bungee trolley position on the | |
| ElektRail when the elastic cords are fully relaxed | |
| Start position of the BLLS on the ElektRail and bungee trolley position on the | |
| ElektRail when the elastic cords are elongated with the maximum e of a | |
| respective BLLS | |
| Carriage position on the ElektRail prior to deceleration | |
| x | Position relative to the ElektRail coordinates |
| Velocity relative to the ElektRail coordinates | |
| Acceleration relative to the ElektRail coordinates | |
| Position relative to the BLLS coordinates | |
| Velocity relative to the BLLS coordinates | |
| Acceleration relative to the BLLS coordinates | |
| Forward force of the eight electric BLDC motors | |
| Braking force of the eight electric BLDC motors | |
| g | Gravitational acceleration |
| Inclination angle of the ropes due to the vertical offset d and horizontal offset | |
| between the bungee trolley and the pulleys | |
| Total inertial force | |
| Total aerodynamic drag force | |
| Total friction force | |
| Total effective propelling force | |
| Effective rebounding force of the elastic cords on the bungee trolley | |
| Effective stretching force of the elastic cords on the bungee trolley | |
| Effective force of the elastic cords on the bungee trolley | |
| Effective rebounding force of the elastic cords on the carriage | |
| Effective stretching force of the elastic cords on the carriage | |
| Effective force of the elastic cords on the carriage | |
| Aerodynamic drag force of the UAV | |
| Lift force of the UAV | |
| Aerodynamic drag force of the carriage | |
| N | Total normal force |
| T | Thrust force of the UAV |
| Rebounding force of the elastic cords | |
| Stretching force of the elastic cords | |
| Force of the elastic cords | |
| Rebounding force of one elastic cord | |
| Stretching force of one elastic cord | |
| Force of one elastic cord | |
| Elongated length of the elastic cords | |
| a | Acceleration of an LMD |
| s | Displacement of an LMD |
| Final velocity of an LMD | |
| Initial velocity of an LMD |
Abbreviations
| AWE | Airborne Wind Energy |
| AWES | Airborne Wind Energy System |
| BLDC | Brushless Direct Current Motor |
| BLLS | Bungee Launch and Landing System |
| BT | Bungee Trolley |
| C | Carriage |
| GroLaS | Ground-based Landing Gear System |
| LMD | Linear Motor Drive |
| uSTOL | Ultra-Short Take-off and Landing |
| xSTOL | Extra-Short Take-off and Landing |
| UAV | Unmanned Aerial Vehicle |
References
- Diehl, M. Airborne Wind Energy: Basic Concepts and Physical Foundations. In Airborne Wind Energy. Green Energy and Technology; Ahrens, U., Diehl, M., Schmehl, R., Eds.; Springer: Heidelberg, Germany, 2 October 2013. [Google Scholar]
- Fagiano, L.; Schnez, S. On the take-off of airborne wind energy systems based on rigid wings. Renew. Energy 2017, 107, 473–488. [Google Scholar] [CrossRef]
- Fagiano, L.; Nguyen-Van, E.; Rager, F.; Schnez, S.; Ohler, C. A Small-Scale Prototype to Study the Takeoff of Tethered Rigid Aircrafts for Airborne Wind Energy. IEEE/ASME Trans. Mechatron. 2017, 22, 1869–1880. [Google Scholar] [CrossRef]
- Fagiano, L.; Nguyen-Van, E.; Schnez, S. Linear take-off and landing of a rigid aircraft for airborne wind energy extraction. In Airborne Wind Energy. Green Energy and Technology; Schmehl, R., Ed.; Springer: Singapore, 2018; pp. 491–514. [Google Scholar]
- Fagiano, L.; Nguyen-Van, E.; Rager, F.; Schnez, S.; Ohler, C. Autonomous Takeoff and Flight of a Tethered Aircraft for Airborne Wind Energy. IEEE Trans. Control Syst. Technol. 2017, 26, 151–166. [Google Scholar] [CrossRef]
- Cherubini, A.; Papini, A.; Vertechy, R.; Fontana, M. Airborne Wind Energy Systems: A review of technologies. Renew. Sustain. Energy Rev. 2015, 51, 1461–1476. [Google Scholar] [CrossRef]
- Kruijff, M.; Ruiterkamp, R. A Roadmap Towards Airborne Wind Energy in the Utility Sector. In Airborne Wind Energy. Green Energy and Technology; Schmehl, R., Ed.; Springer: Singapore, 1 April 2018; pp. 643–662. [Google Scholar]
- Williams, P.; Paz, M.; Kruijff, M.; Steenhuizen, D. Autonomous Takeoff and Landing of Rigid Wing Airborne Wind Energy Systems. In Proceedings of the Airborne Wind Energy Conference 2019, Glasgow, UK, 15–16 October 2019; Available online: http://resolver.tudelft.nl/uuid:07846942-7d5a-4c57-9fc6-01c639b95d41 (accessed on 1 February 2022). [CrossRef]
- Drenth, S. Wave Limitations for Floating AWES: A Method for Determining Effects of Wave Induced Motions on Horizontally Landing Airborne Wind Energy Systems on Floating Foundations. 2017. Available online: http://resolver.tudelft.nl/uuid:6e3d5671-9e0a-42ff-8d53-2a4923731632 (accessed on 1 February 2022).
- Vimalakanthan, K.; Caboni, M.; Schepers, J.G.; Pechenik, E.; Williams, P. Aerodynamic analysis of Ampyx’s airborne wind energy system. J. Phys. Conf. Ser. 2018, 1037, 062008. [Google Scholar] [CrossRef]
- Kruijff, M.; Ruiterkamp, R. AP-3, a Safety and Autonomy Demonstrator for Utility-Scale Airborne Wind Energy. In Proceedings of the Airborne Wind Energy Conference 2017, Freiburg im Breisgau, Germany, 5–6 October 2017; Available online: http://resolver.tudelft.nl/uuid:53286eb3-3e58-4f33-accf-c80c4876a60a (accessed on 1 February 2022).
- Brodrick, T.; Tabor, S.; Rebbeck, H. Effect of Mass on Airborne Wind Energy Performance. In Proceedings of the Airborne Wind Energy Conference 2019, Glasgow, UK, 15–16 October 2019; Available online: http://resolver.tudelft.nl/uuid:c390a5bc-4e7b-4f1d-861a-ed15fd407ae6 (accessed on 1 February 2022).
- ElektRail. Available online: https://www.elektrail.com (accessed on 2 November 2021).
- Elhashash, M. System Design for Shortened ElektRail UAV Launch and Landing System for Airborne Wind Energy Generation from Offshore Platforms. Master’s Thesis, Deutsches Zentrum für Luft und Raumfahrt e.V. (DLR), Institute für Lufttransportsysteme (ILT), Technische Universität Hamburg (TUHH), Hamburg, Germany, 2021. [Google Scholar]
- Elhashash, M. Development and Implementation of Four Functionality Modes for a Track-Based Launch and Landing System. Project Thesis, Deutsches Zentrum für Luft und Raumfahrt e.V. (DLR), Institute für Lufttransportsysteme (ILT), Technische Universität Hamburg (TUHH), Hamburg, Germany, 2020. [Google Scholar]
- Novakovic, Z.; Medar, N.; Mitrovic, L. Increasing Launch Capability of a UAV Bungee Catapult. Sci. Tech. Rev. 2014, 64, 17–26. [Google Scholar]
- INTRASYS. Available online: https://intrasys-gmbh.com/lineare-antriebstechnik/das-slim-antriebssystem/ (accessed on 26 October 2021).
- AEROTECH. Available online: https://www.aerotech.com/wp-content/uploads/2020/12/linear-motors-application-en.pdf (accessed on 26 October 2021).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Take-Off | Landing | |
|---|---|---|
| Acceleration | , , T, , , | , , |
| , , | , | |
| Synchronisation | , | , |
| , | ||
| Deceleration | , , | , , , , |
| , | , , |
| Coefficient | p0 | p1 | p2 | p3 | p4 | p5 | p6 | p7 | p8 |
|---|---|---|---|---|---|---|---|---|---|
| 5 m cord | −6.618 | 2531 | −2593 | 1298 | −124.2 | −144.8 | 62.59 | −10.07 | 0.592 |
| 5.5 m cord | −6.618 | 2301 | −2143 | 975.4 | −84.80 | −89.91 | 35.33 | −5.167 | 0.276 |
| Coefficient | p00 | p11 | p22 | p33 | p44 | p55 | p66 | p77 | p88 |
|---|---|---|---|---|---|---|---|---|---|
| 5 m cord | 7.499 | 4707 | −7681 | 6859 | −3456 | 1026 | −178.2 | 16.78 | −0.662 |
| 5.5 m cord | 7.499 | 4279 | −6348 | 5153 | −2361 | 637.3 | −100.6 | 8.609 | −0.309 |
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Electric motor forwards force | 4000 | N | |
| T | UAV thrust force | 750 | N |
| Electric motor backwards (braking) force | 4000 | N |
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| UAV mass | 317 | kg | |
| Carriage mass | 550 | kg | |
| Bungee trolley mass | 40 | kg | |
| Cross-sectional area of the carriage | m2 | ||
| Aerodynamic surface of the wing | m2 | ||
| Drag force coefficient of the carriage | - | ||
| Drag force coefficient of the UAV with high-lift system | - | ||
| Lift force coefficient of the UAV with high-lift system | - | ||
| d | Vertical offset between bungee trolley and pulleys | m | |
| Rolling friction coefficient | - | ||
| Air density | kg/m3 |
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Length of one relaxed elastic cord | 5 | m | |
| Number of BLLSs in parallel | 2 | - | |
| Number of elastic cords in parallel per BLLS | 23 | - |
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Length of one relaxed elastic cord | m | ||
| Number of BLLSs in parallel | 2 | - | |
| Number of elastic cords in parallel per BLLS | 15 | - |
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Initial elongation of the elastic cords | 80 | % | |
| Distance travelled during landing acceleration phase | 5 | m | |
| Change in velocity during landing acceleration phase | 25 | m/s | |
| Maximum landing acceleration rate | m/s2 | ||
| Duration of landing acceleration phase | s |
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Final elongation of the elastic cords | % | ||
| Distance travelled during landing deceleration phase | m | ||
| Change in velocity during landing deceleration phase | m/s | ||
| Maximum landing deceleration rate | m/s2 | ||
| Duration of landing deceleration phase | s |
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Initial elongation of the elastic cords | 80 | % | |
| Distance travelled during take-off acceleration phase | m | ||
| Change in velocity during take-off acceleration phase | 25 | m/s | |
| Maximum take-off acceleration rate | m/s2 | ||
| Duration of take-off acceleration phase | s |
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Final elongation of the elastic cords | % | ||
| Distance travelled during take-off deceleration phase | m | ||
| Change in velocity during take-off deceleration phase | m/s | ||
| Maximum take-off deceleration rate | m/s2 | ||
| Duration of take-off deceleration phase | s |
| Required tsync,landing | Available tsync,take-off | System Length |
|---|---|---|
| 0.2 s | 0.08 s | 19.3 m |
| 0.5 s | 0.38 s | 26.8 m |
| 1 s | 0.88 s | 39.3 m |
| 1.5 s | 1.38 s | 51.8 m |
| Acceleration | Deceleration | Required System Length | |
|---|---|---|---|
| Take-off | 5 g | 10 g | 9.6 m |
| Landing | 10 g | 5 g | 14.6 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Müller, J.A.; Elhashash, M.Y.M.K.; Gollnick, V. Electrical Launch Catapult and Landing Decelerator for Fixed-Wing Airborne Wind Energy Systems. Energies 2022, 15, 2502. https://doi.org/10.3390/en15072502
Müller JA, Elhashash MYMK, Gollnick V. Electrical Launch Catapult and Landing Decelerator for Fixed-Wing Airborne Wind Energy Systems. Energies. 2022; 15(7):2502. https://doi.org/10.3390/en15072502
Chicago/Turabian StyleMüller, Johannes Alexander, Mostafa Yasser Mostafa Khalil Elhashash, and Volker Gollnick. 2022. "Electrical Launch Catapult and Landing Decelerator for Fixed-Wing Airborne Wind Energy Systems" Energies 15, no. 7: 2502. https://doi.org/10.3390/en15072502