
Multi-Sensor Data Fusion Approach for Kinematic Quantities



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Proposed Data Fusion Method
2.1. Problem Statement
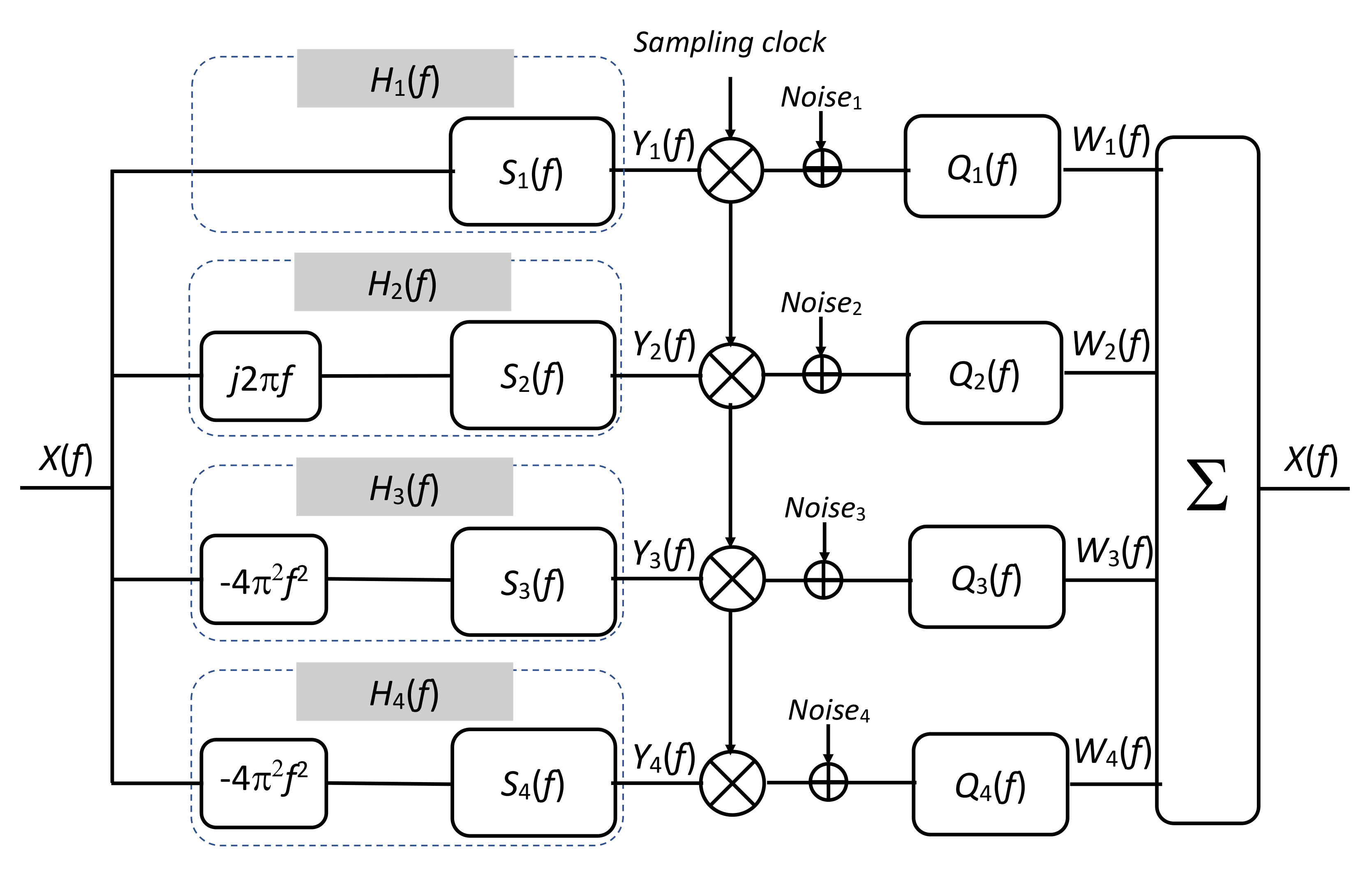
2.2. System Architecture
2.3. Filter Identification
2.4. Filter Synthesis
3. Simulations
3.1. Performance Assessment
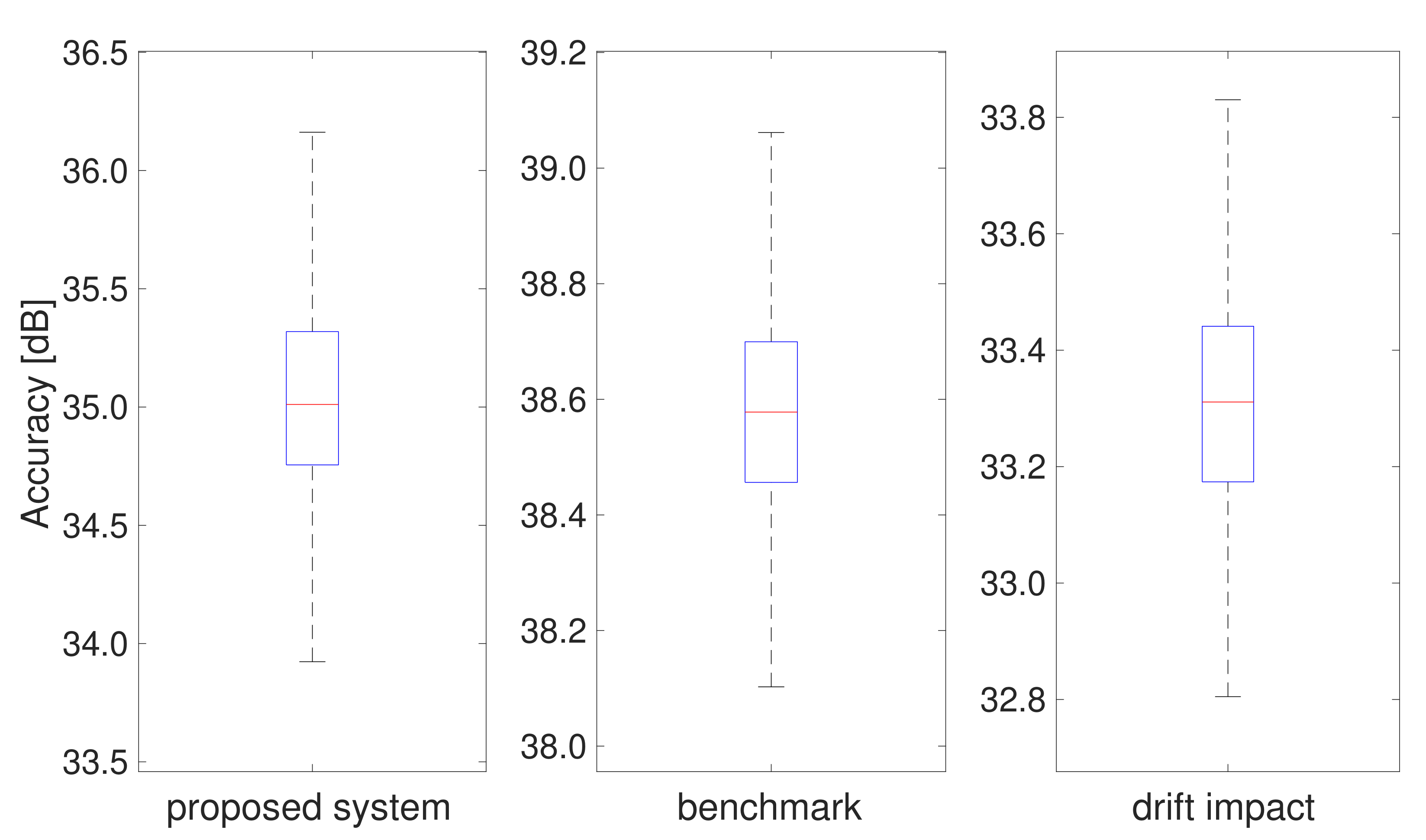
3.2. Comparison with a Benchmark
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Samatas, G.G.; Pachidis, T.P. Inertial Measurement Units (IMUs) in Mobile Robots over the Last Five Years: A Review. Designs 2022, 6, 17. [Google Scholar] [CrossRef]
- Viana, K.; Zubizarreta, A.; Diez, M. A Reconfigurable Framework for Vehicle Localization in Urban Areas. Sensors 2022, 22, 2595. [Google Scholar] [CrossRef] [PubMed]
- Sarker, A.; Emenonye, D.R.; Kelliher, A.; Rikakis, T.; Buehrer, R.M.; Asbeck, A.T. Capturing Upper Body Kinematics and Localization with Low-Cost Sensors for Rehabilitation Applications. Sensors 2022, 22, 2300. [Google Scholar] [CrossRef] [PubMed]
- Seco, T.; Lázaro, M.T.; Espelosín, J.; Montano, L.; Villarroel, J.L. Robot Localization in Tunnels: Combining Discrete Features in a Pose Graph Framework. Sensors 2022, 22, 1390. [Google Scholar] [CrossRef]
- Uradziński, M.; Mieczysław, B. Assessment of static positioning accuracy using low-cost smartphone GPS devices for geodetic survey points’ determination and monitoring. Appl. Sci. 2020, 10, 5308. [Google Scholar] [CrossRef]
- He, X.; Gao, W.; Sheng, C.; Zhang, Z.; Pan, S.; Duan, L.; Zhang, H.; Lu, X. LLiDAR-Visual-Inertial Odometry Based on Optimized Visual Point-Line Features. Remote Sens. 2022, 14, 622. [Google Scholar] [CrossRef]
- Barbosa, L.A.; Costa, D.C.; de Oliveira, H.C. Evaluation of low-cost GNSS receivers for speed monitoring. Case Stud. Transp. Policy 2022, 10, 1. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, Z.; Zhong, Y.; Chen, L. Localization Error Modeling for Autonomous Driving in GPS Denied Environment. Electronics 2022, 11, 647. [Google Scholar] [CrossRef]
- Ai, X.; Zheng, Y.; Xu, Z.; Zhao, F. Parameter Estimation for Uniformly Accelerating Moving Target in the Forward Scatter Radar Network. Remote Sens. 2022, 14, 1006. [Google Scholar] [CrossRef]
- Vargas, J.; Alsweiss, S.; Toker, O.; Razdan, R.; Santos, J. An overview of autonomous vehicles sensors and their vulnerability to weather conditions. Remote Sens. 2021, 21, 5397. [Google Scholar] [CrossRef]
- Pirník, R.; Hruboš, M.; Nemec, D.; Mravec, T.; Božek, P. Integration of inertial sensor data into control of the mobile platform. In Federated Conference on Software Development and Object Technologies; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Narasimhappa, M.; Mahindrakar, A.D.; Guizilini, V.C.; Terra, M.H.; Sabat, S.L. MEMS-based IMU drift minimization: Sage Husa adaptive robust Kalman filtering. IEEE Sens. J. 2019, 20, 250–260. [Google Scholar] [CrossRef]
- Brossard, M.; Bonnabel, S. Learning wheel odometry and IMU errors for localization. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Wen, Z.; Yang, G.; Cai, Q. An Improved Calibration Method for the IMU Biases Utilizing KF-Based AdaGrad Algorithm. Sensors 2021, 21, 5055. [Google Scholar] [CrossRef] [PubMed]
- Cui, H.; Guan, Y.; Chen, H. Rolling element fault diagnosis based on VMD and sensitivity MCKD. IEEE Access 2021, 9, 120297–120308. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Min, F.; Chen, G.S.; Shen, S.P.; Wen, Z.C.; Zhou, X.B. Tri-Partition State Alphabet-Based Sequential Pattern for Multivariate Time Series. Cogn. Comput. 2021, 11, 11294. [Google Scholar] [CrossRef]
- Deng, W.; Li, Z.; Li, X.; Chen, H.; Zhao, H. Compound fault diagnosis using optimized MCKD and sparse representation for rolling bearings. IEEE Trans. Instrum. Meas. 2022, 71, 3508509. [Google Scholar] [CrossRef]
- Li, S.; Gao, Y.; Meng, G.; Wang, G.; Guan, L. Accelerometer-Based Gyroscope Drift Compensation Approach in a Dual-Axial Stabilization Platform. Electronics 2019, 8, 594. [Google Scholar] [CrossRef] [Green Version]
- Poulose, A.; Eyobu, O.S.; Han, D.S. An indoor position-estimation algorithm using smartphone IMU sensor data. IEEE Access 2019, 7, 11165–11177. [Google Scholar] [CrossRef]
- Lahat, D.; Adali, T.; Jutten, C. Multimodal Data Fusion: An Overview of Methods, Challenges, and Prospects. Proc. IEEE-Invit. Pap. 2015, 103, 1449–1477. [Google Scholar] [CrossRef] [Green Version]
- Macii, D.; Boni, A.; De Cecco, M.; Petri, D. Tutorial 14: Multisensor Data—Part 14 in a series of tutorials in instrumentation and measurement. IEEE Instrum. Meas. Mag. 2008, 6, 24–33. [Google Scholar] [CrossRef]
- Liu, Z.; Xiao, G.; Liu, H.; Wei, H. Multi-Sensor Measurement and Data Fusion. IEEE Instrum. Meas. Mag. 2020, 2, 28–36. [Google Scholar] [CrossRef]
- D’Adamo, T.; Phillips, T.; McAree, P. LiDAR-Stabilised GNSS-IMU Platform Pose Tracking. Sensors 2022, 22, 2248. [Google Scholar] [CrossRef] [PubMed]
- Ravindran, R.; Santora, M.J.; Jamali, M.M. Camera, LiDAR, and Radar Sensor Fusion Based on Bayesian Neural Network (CLR-BNN). IEEE Sens. J. 2022, 22, 6964–6974. [Google Scholar] [CrossRef]
- Monrroy Cano, A.; Lambert, J.; Edahiro, M.; Kato, S. Single-Shot Intrinsic Calibration for Autonomous Driving Applications. Sensors 2022, 22, 2067. [Google Scholar] [CrossRef] [PubMed]
- Qiu, Z.; Zhang, J.; Lyu, S. Compensation Filtering for Spacecraft Attitude Estimation Using Error-Covariance Reconstruction. IEEE Trans. Instrum. Meas. 2022. [Google Scholar] [CrossRef]
- Dong, X.; Huang, Y.; Lai, P.; Huang, Q.; Su, W.; Li, S.; Xu, W. Research on Decomposition of Offset in MEMS Capacitive Accelerometer. Micromachines 2021, 12, 1000. [Google Scholar] [CrossRef]
- Li, Q.; Nevalainen, P.; Peña Queralta, J.; Heikkonen, J.; Westerlund, T. Localization in Unstructured Environments: Towards Autonomous Robots in Forests with Delaunay Triangulation. Remote Sens. 2020, 12, 1870. [Google Scholar] [CrossRef]
- Mikov, A.; Panyov, A.; Kosyanchuk, V.; Prikhodko, I. Sensor Fusion For Land Vehicle Localization Using Inertial MEMS and Odometry. In Proceedings of the 2019 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Naples, FL, USA, 1–5 April 2019; pp. 1–2. [Google Scholar] [CrossRef]
- De Alteriis, G.; Accardo, D.; Conte, C.; Schiano Lo Moriello, R. Performance Enhancement of Consumer-Grade MEMS Sensors through Geometrical Redundancy. Sensors 2021, 21, 4851. [Google Scholar] [CrossRef]
- Larey, A.; Aknin, E.; Klein, I. Multiple Inertial Measurement Units–An Empirical Study. IEEE Access 2020, 8, 75656–75665. [Google Scholar] [CrossRef]
- Han, J.-H.; Park, C.-H.; Kwon, J.H.; Lee, J.; Kim, T.S.; Jang, Y.Y. Performance Evaluation of Autonomous Driving Control Algorithm for a Crawler-Type Agricultural Vehicle Based on Low-Cost Multi-Sensor Fusion Positioning. Appl. Sci. 2020, 10, 4667. [Google Scholar] [CrossRef]
- Kassas, Z.Z.; Maaref, M.; Morales, J.J.; Khalife, J.J.; Shamei, K. Robust vehicular localization and map matching in urban environments through IMU, GNSS, and cellular signals. IEEE Intell. Transp. Syst. Mag. 2020, 12, 36–52. [Google Scholar] [CrossRef]
- Yang, P.; Duan, D.; Chen, C.; Cheng, X.; Yang, L. Multi-sensor multi-vehicle (msmv) localization and mobility tracking for autonomous driving. IEEE Trans. Veh. Technol. 2020, 69, 14355–14364. [Google Scholar] [CrossRef]
- Gao, B.; Hu, G.; Gao, S.; Zhong, Y.; Gu, C. Multi-Sensor Optimal Data Fusion Based on the Adaptive Fading Unscented Kalman Filter. Sensors 2018, 18, 488. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, Y.; Ma, H.; Smart, E.; Yu, H. Real-Time Performance-Focused Localization Techniques for Autonomous Vehicle: A Review. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Fayyad, J.; Jaradat, M.A.; Gruyer, D.; Najjaran, H. Deep Learning Sensor Fusion for Autonomous Vehicle Perception and Localization: A Review. Sensors 2020, 20, 4220. [Google Scholar] [CrossRef]
- Liu, J.; Guo, G. Vehicle localization during GPS outages with extended Kalman filter and deep learning. IEEE Trans. Instrum. Meas. 2021, 70, 1–10. [Google Scholar] [CrossRef]
- Papoulis, A. Generalized sampling expansion. IEEE Trans. Circuits Syst. 1977, 24, 652–654. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
D’Arco, M.; Guerritore, M. Multi-Sensor Data Fusion Approach for Kinematic Quantities. Energies 2022, 15, 2916. https://doi.org/10.3390/en15082916
D’Arco M, Guerritore M. Multi-Sensor Data Fusion Approach for Kinematic Quantities. Energies. 2022; 15(8):2916. https://doi.org/10.3390/en15082916
Chicago/Turabian StyleD’Arco, Mauro, and Martina Guerritore. 2022. "Multi-Sensor Data Fusion Approach for Kinematic Quantities" Energies 15, no. 8: 2916. https://doi.org/10.3390/en15082916
APA StyleD’Arco, M., & Guerritore, M. (2022). Multi-Sensor Data Fusion Approach for Kinematic Quantities. Energies, 15(8), 2916. https://doi.org/10.3390/en15082916