
Deep Neural Network Prediction of Mechanical Drilling Speed

Abstract
:1. Introduction
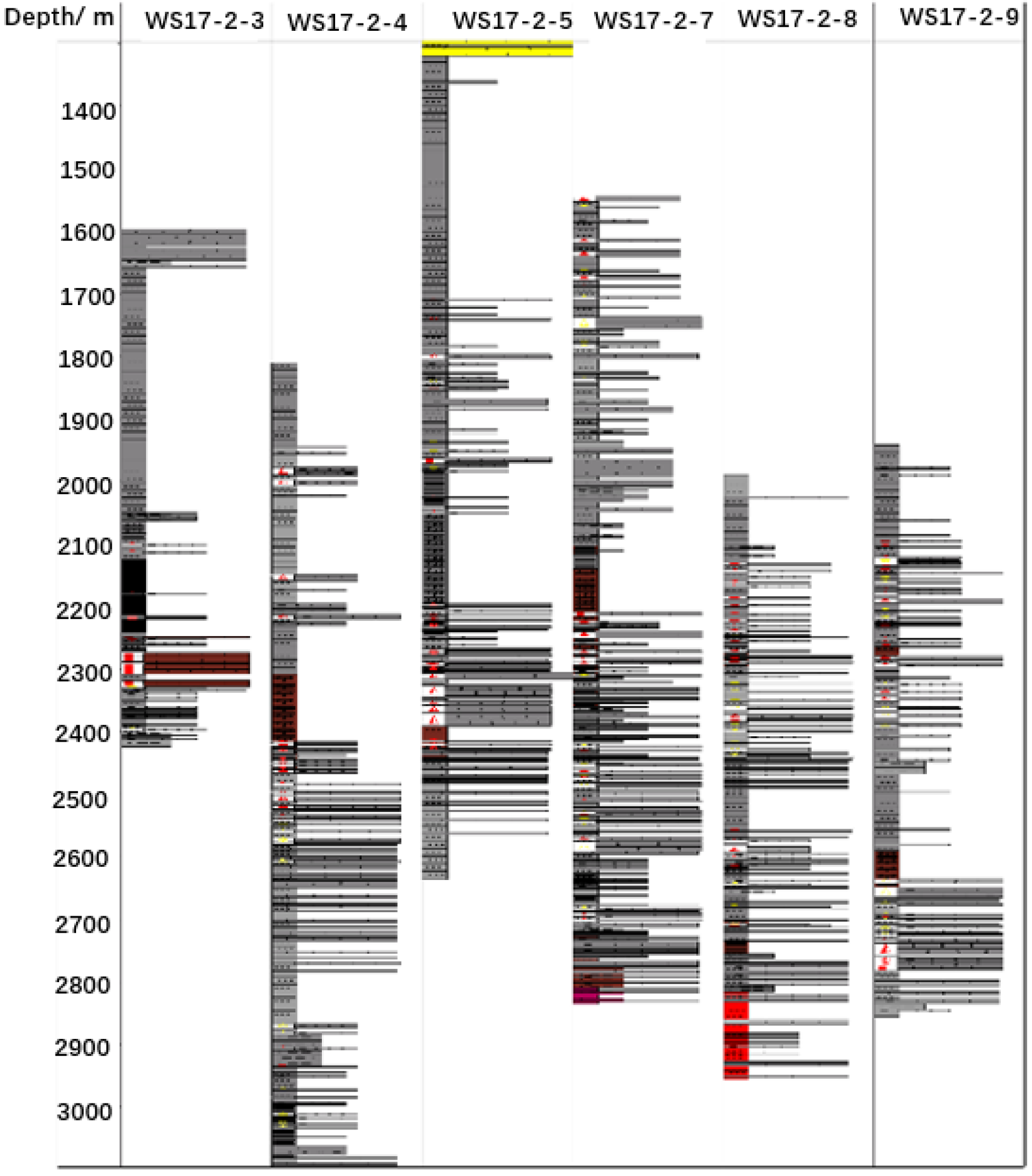
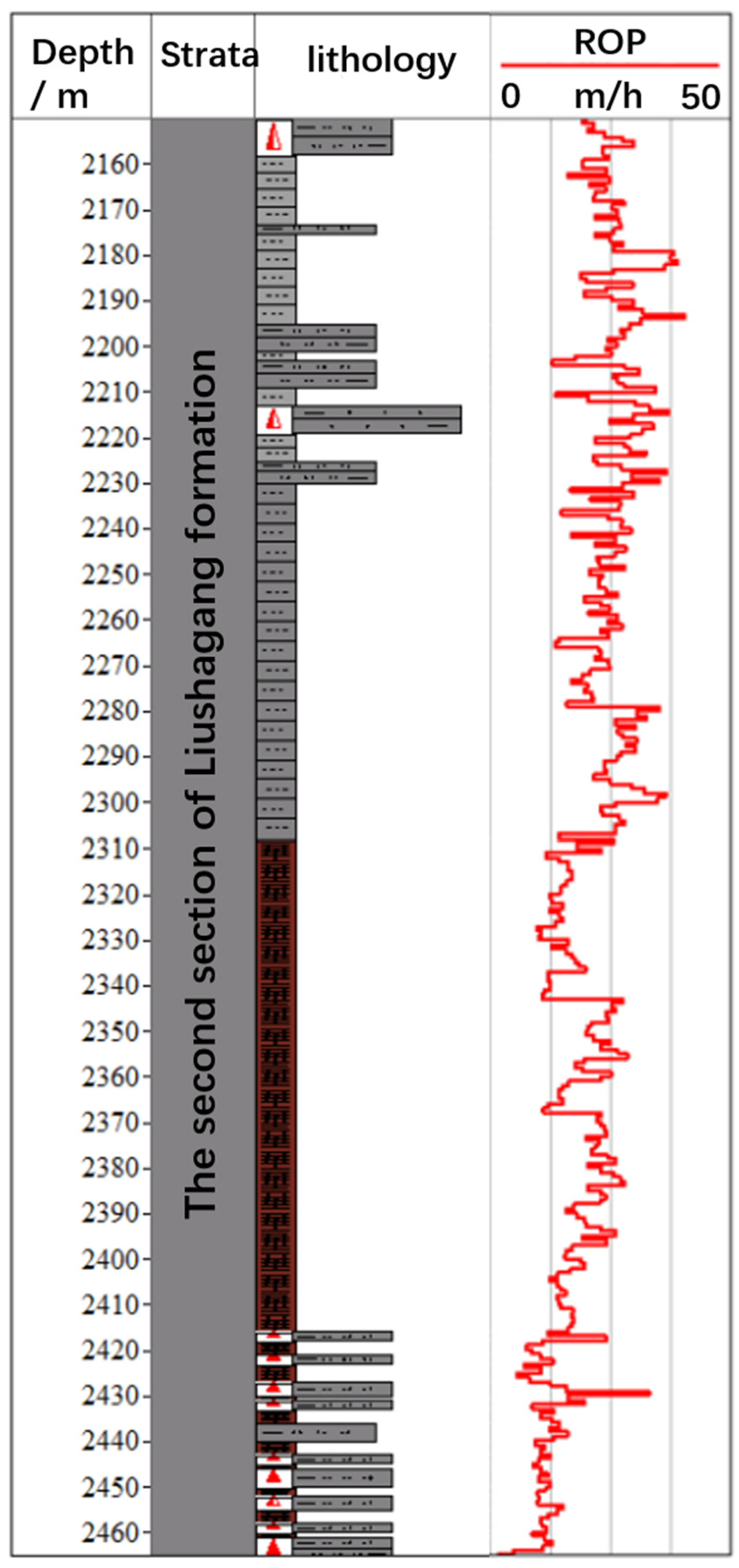
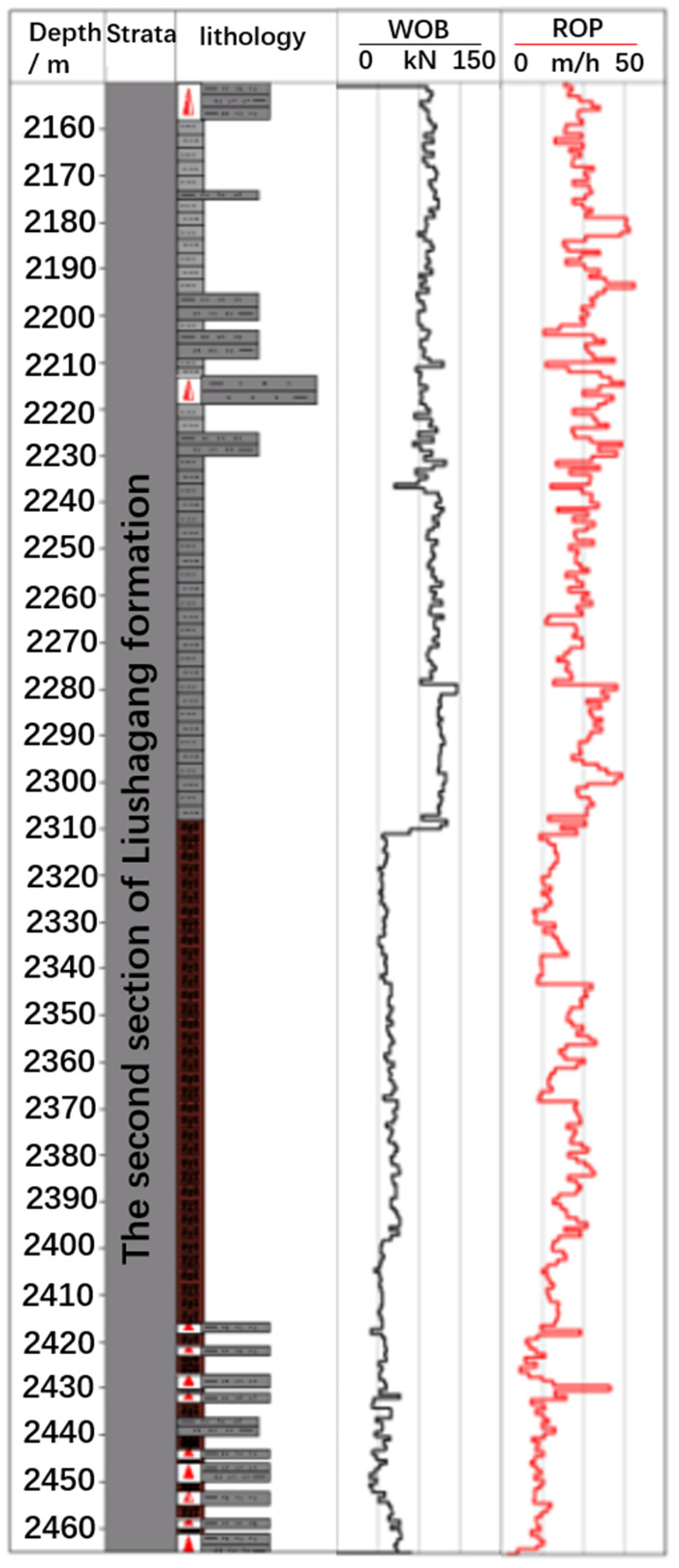
2. Stratigraphic Profiles
3. Controlling Factors of ROP
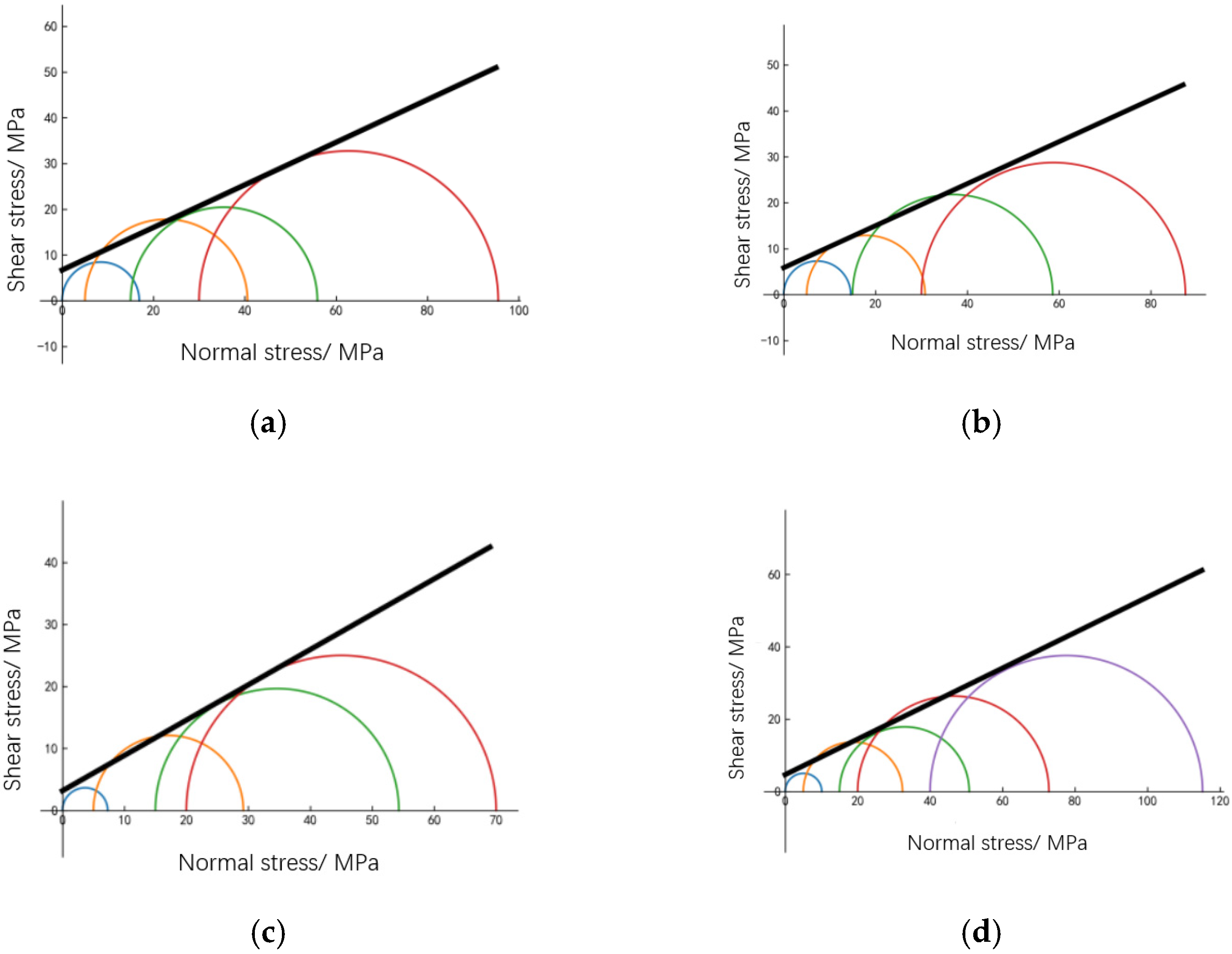
3.1. Stratigraphy
3.2. Drilling Parameters
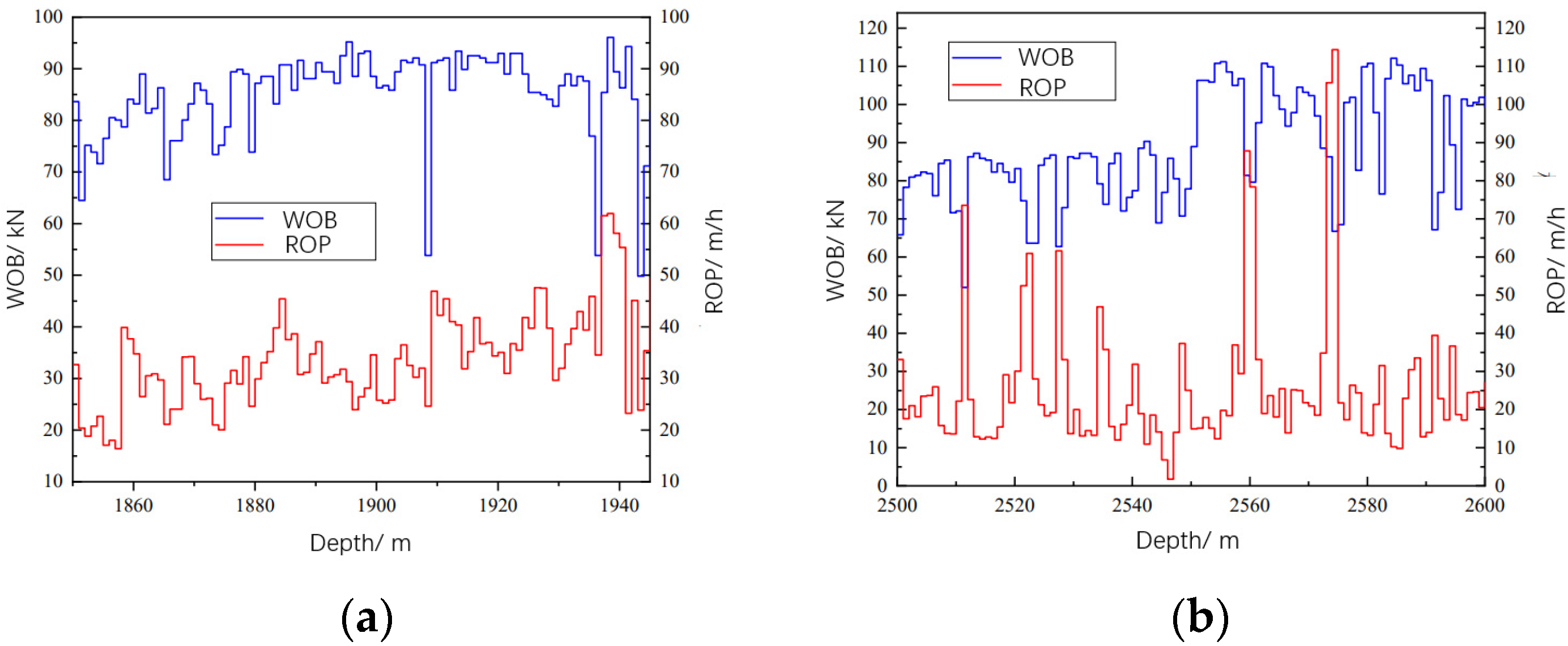
3.2.1. WOB
3.2.2. Rotating Speed
3.2.3. Pump Volume
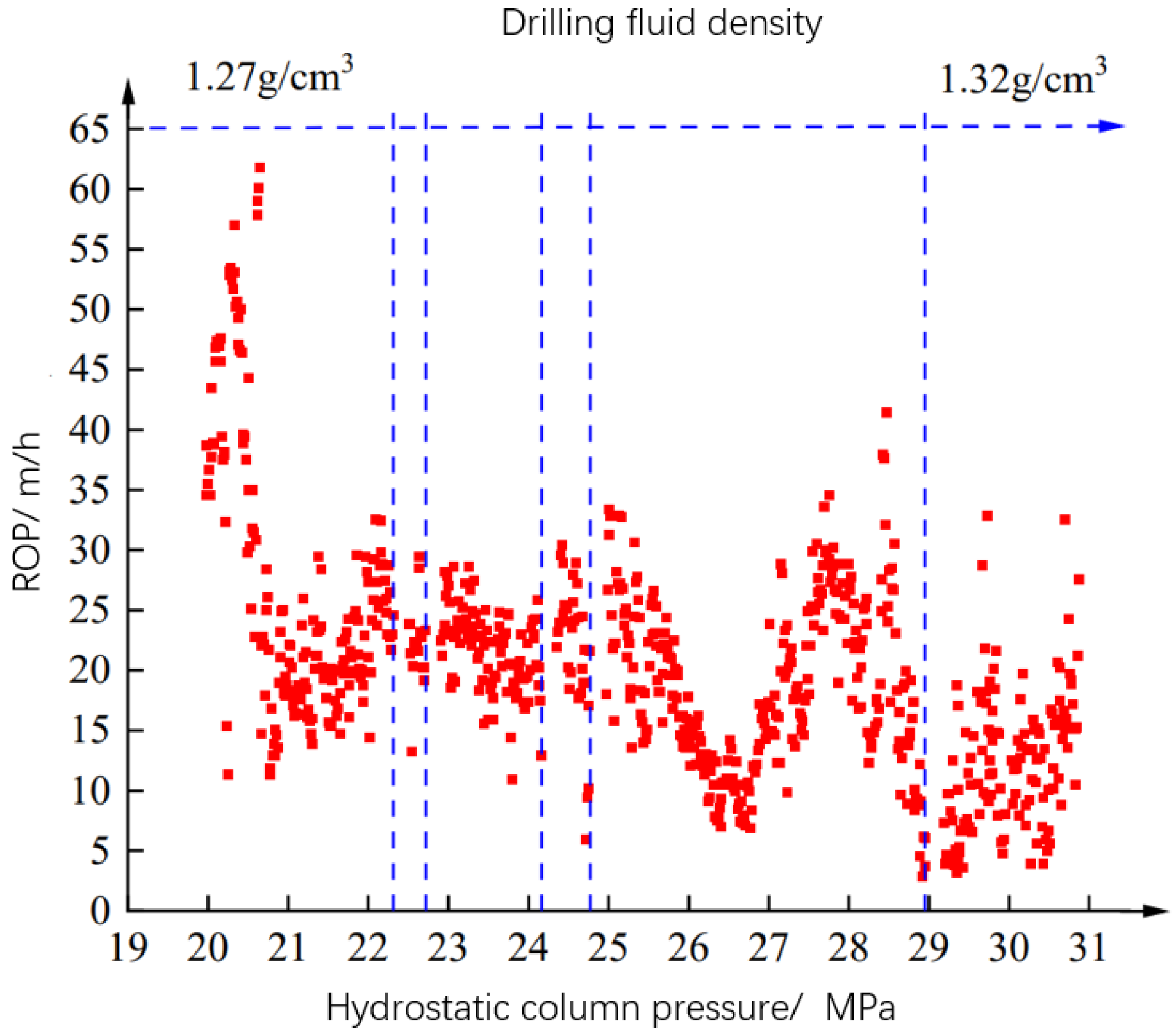
3.2.4. Drilling Fluid Density
3.3. Drilling Tool
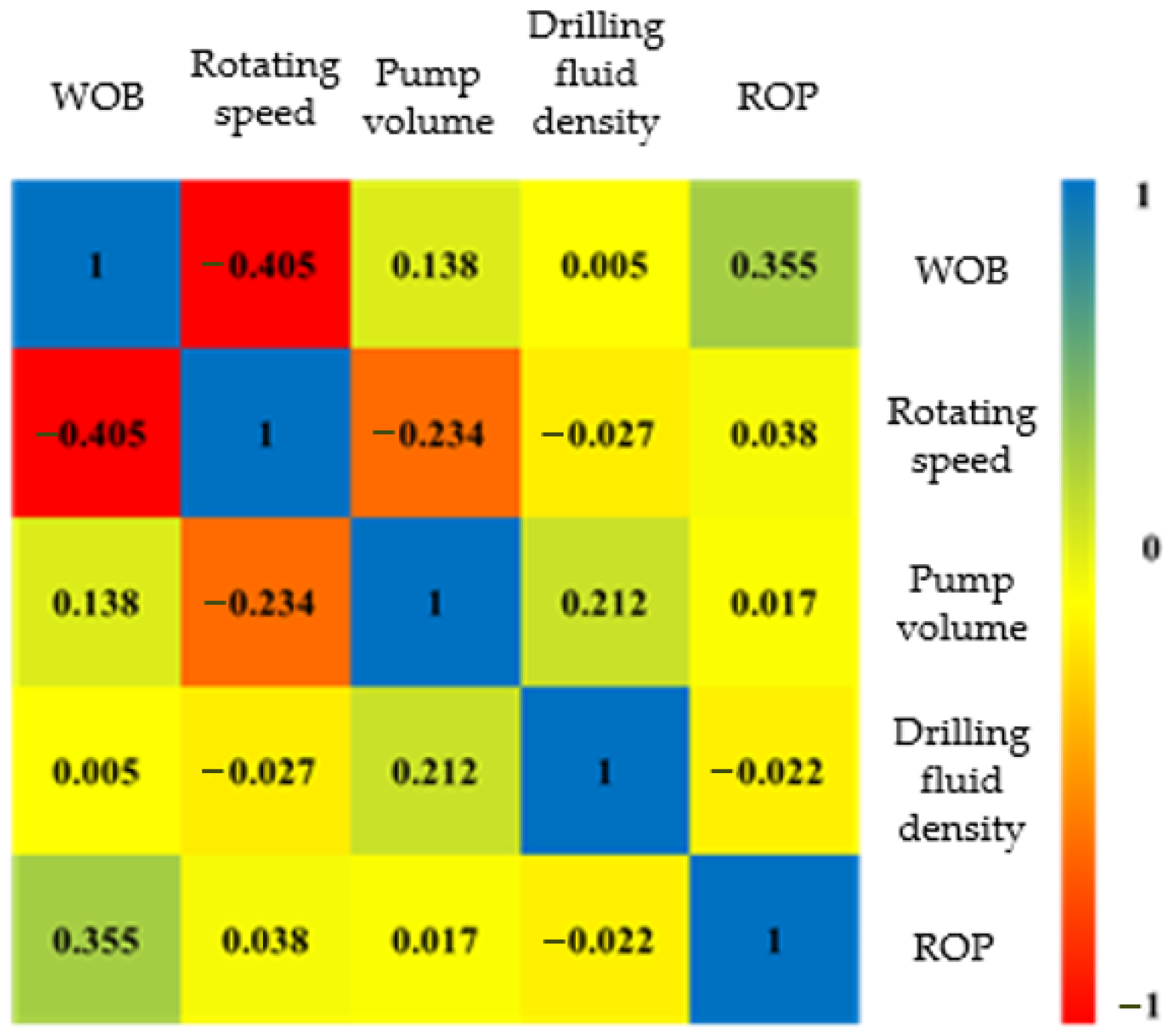
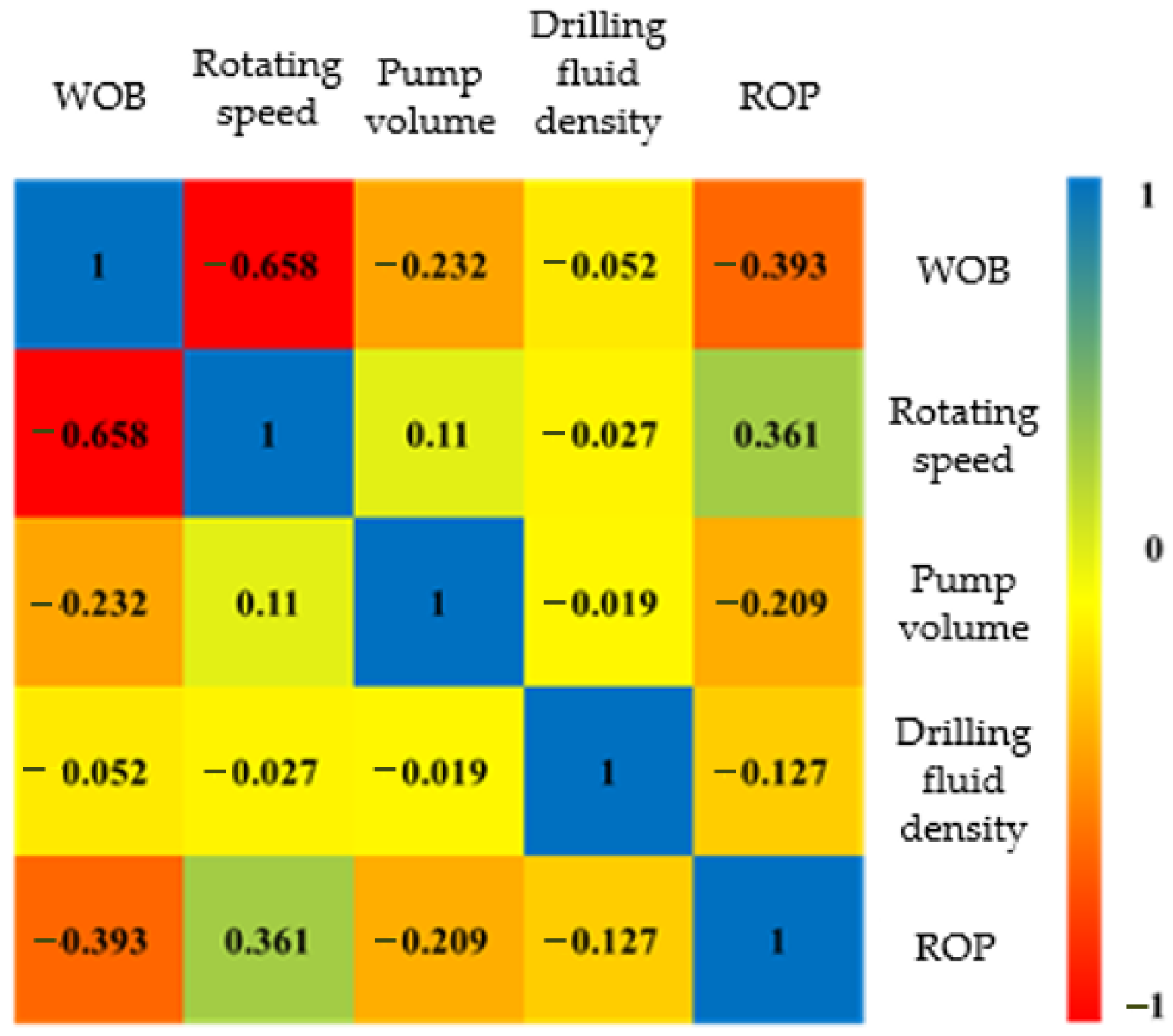
3.4. Analysis of Main Controlling Factors
4. A Prediction Model of ROP Based on DNN
4.1. Design of ROP Prediction Model
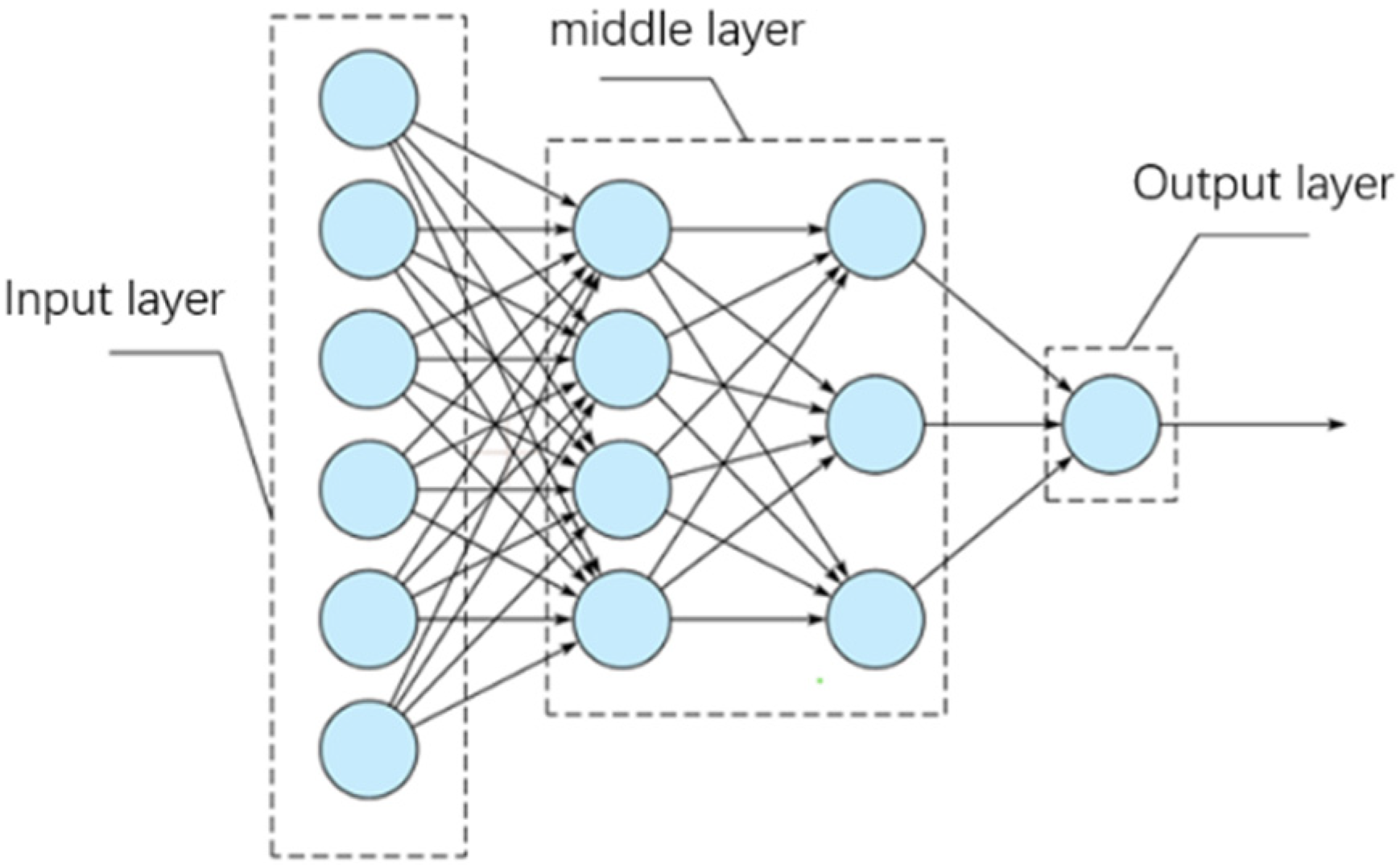
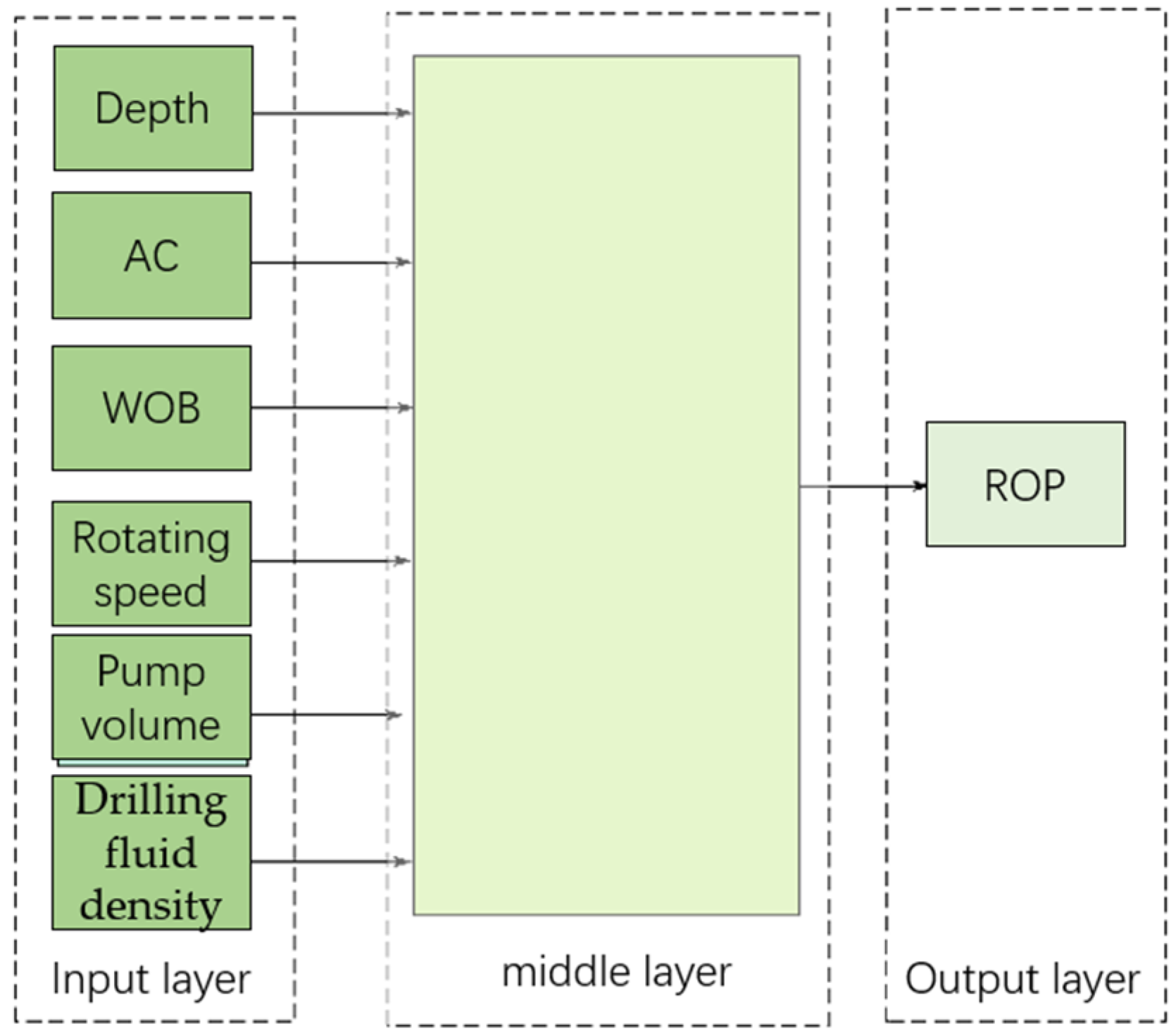
4.1.1. Input Layer, Middle Layer and Output Layer Selection
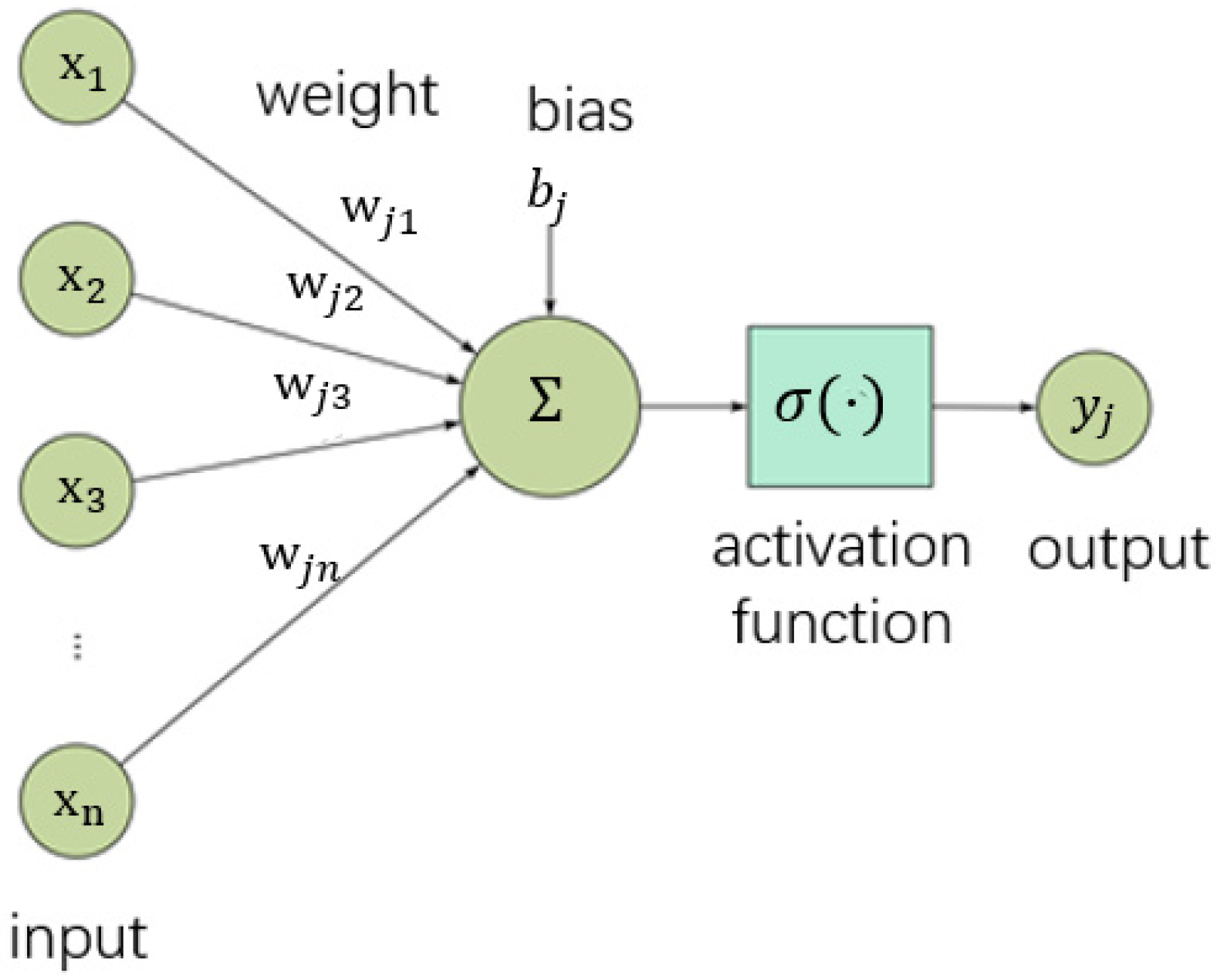
4.1.2. Weights, Bias and Activation Function Settings
4.1.3. Adam Optimizer
4.1.4. Dropout Mechanism
4.1.5. L2 Regularization
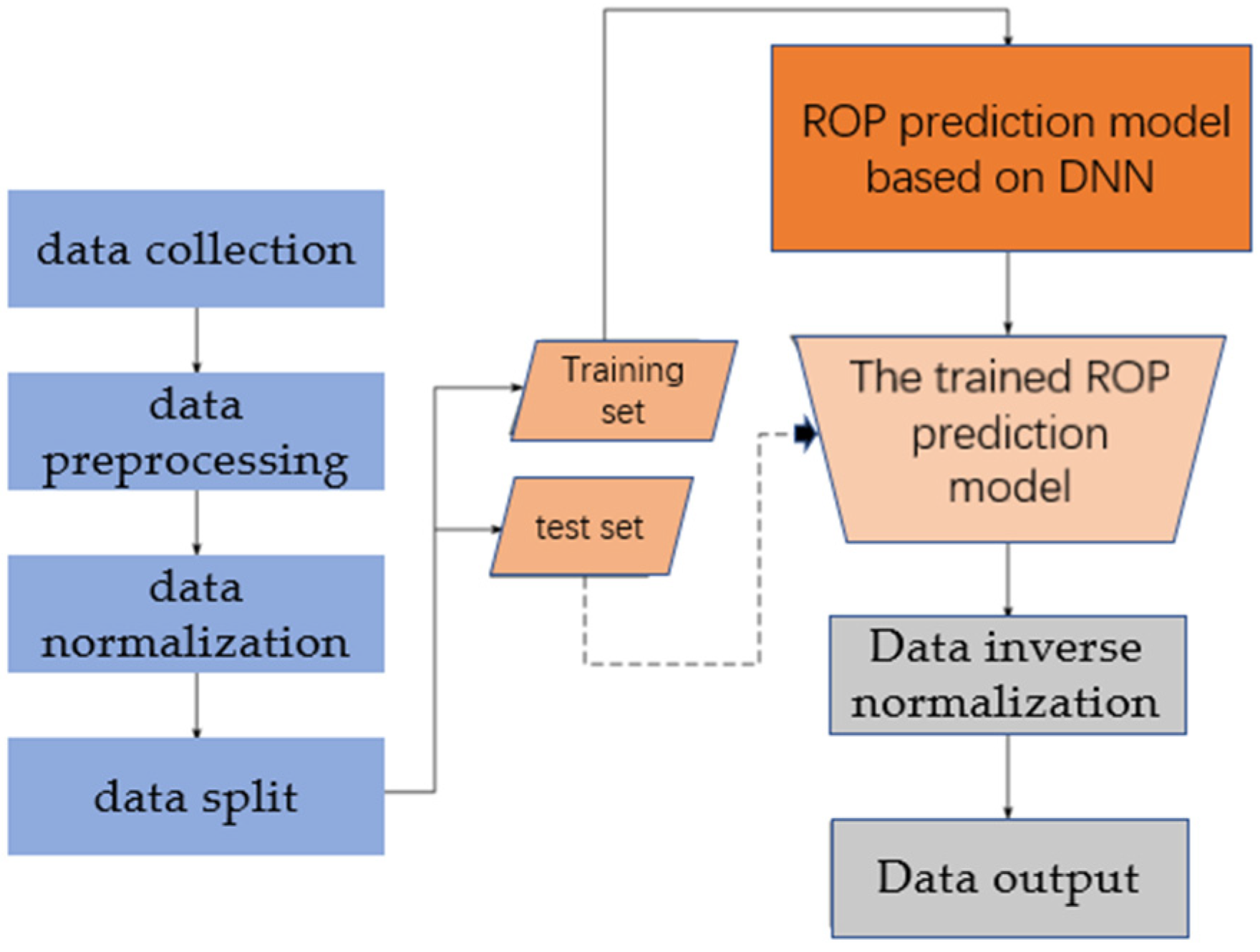
4.1.6. Calculation Process
- Data collection: collect acoustic time, drilling parameters, hydraulic parameters and ROP data.
- Data preprocessing: clean the collected data and fill the missing points with the average value.
- Data normalization: to coordinate the size of different parameters; for example, the numerical range of pump volume is 2000~3500, while the drilling fluid density range is mostly 1.3~1.4. The difference between the two is too large. In order to avoid the calculation error caused by the large gap between the data, as well as the problem of memory usage and slow calculation, the data is normalized.
- Data loading: input the processed data into the DNN.
- Nonlinear mapping: The DNN completes the nonlinear mapping calculation from the input layer to the output layer.
- Data inverse normalization: inverse normalization of output layer data.
- Data output: output the predicted ROP.
4.2. ROP Prediction Model Training
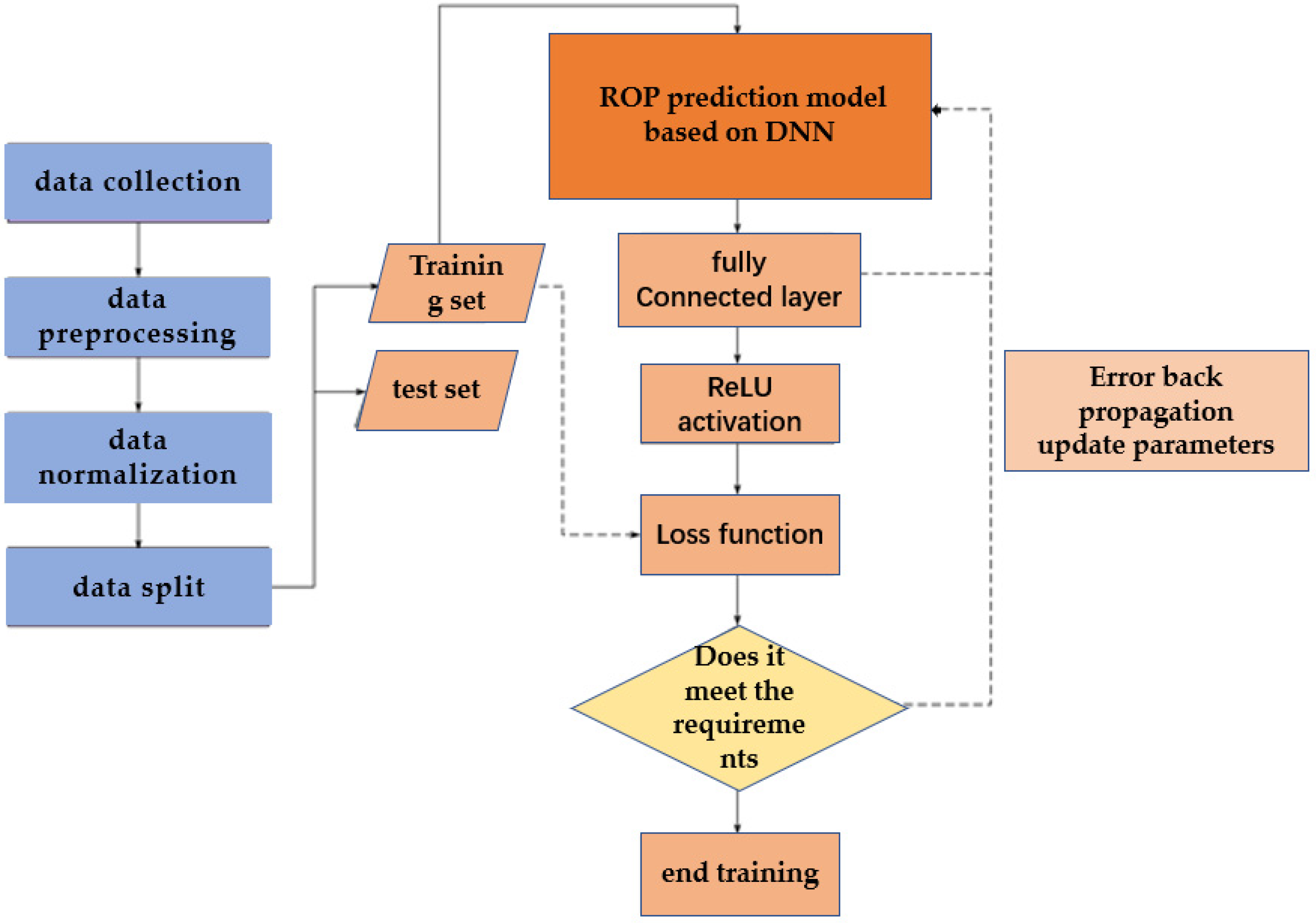
4.2.1. Training Process
4.2.2. Training Data Split
4.2.3. Training Strategy
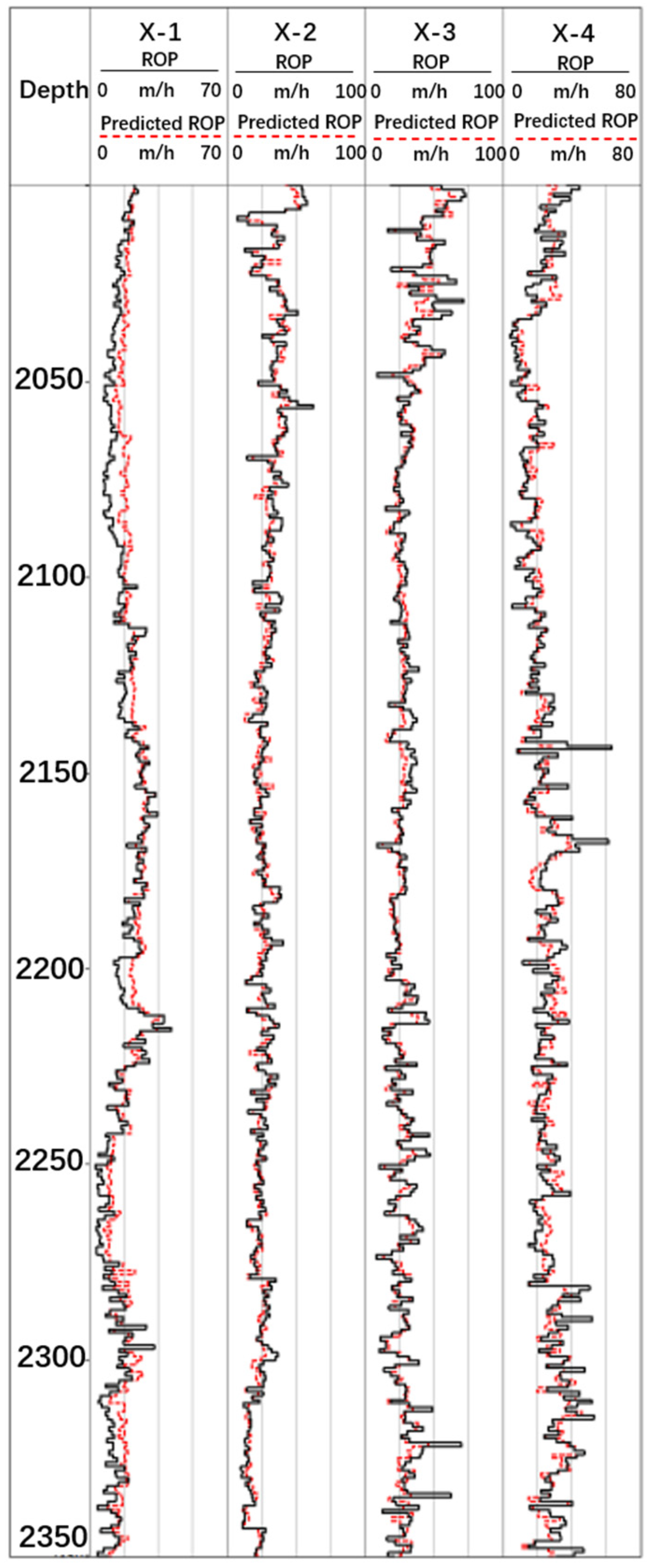
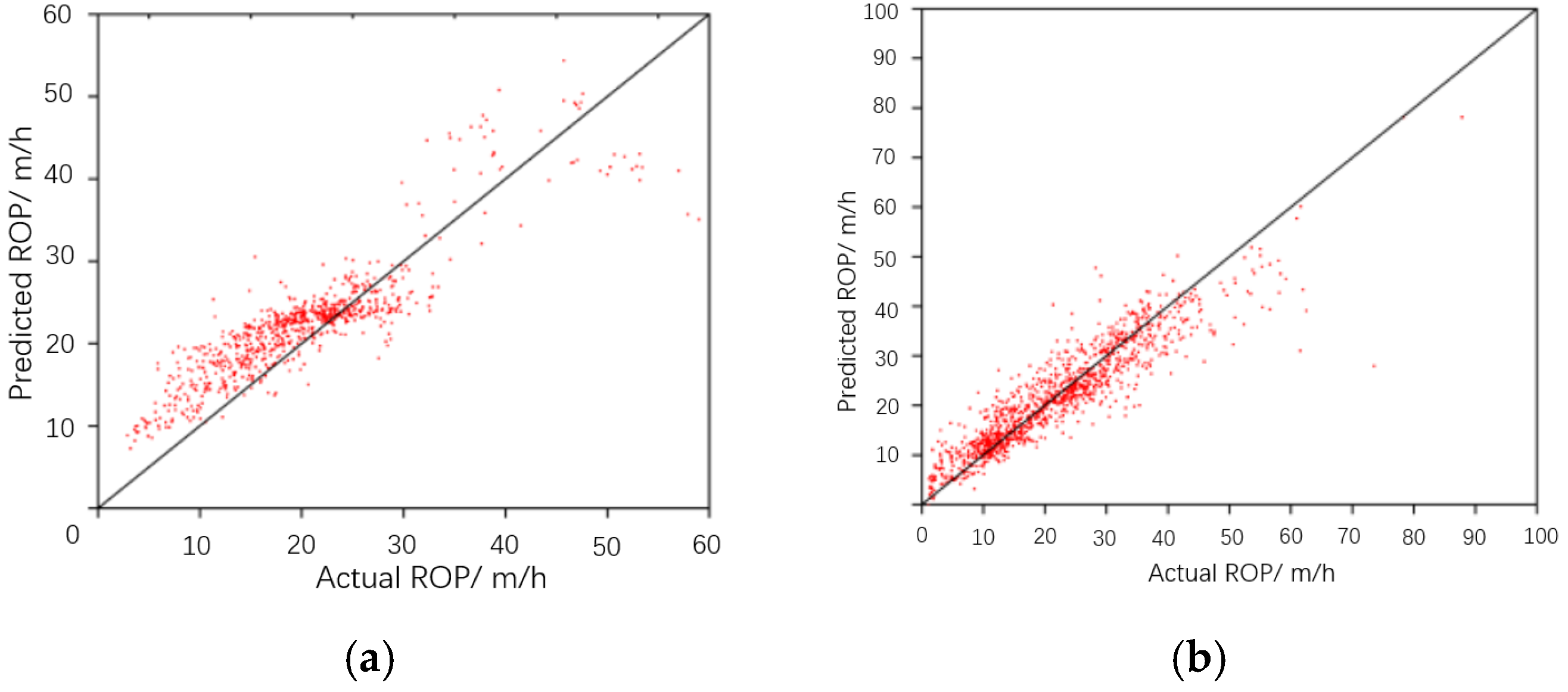
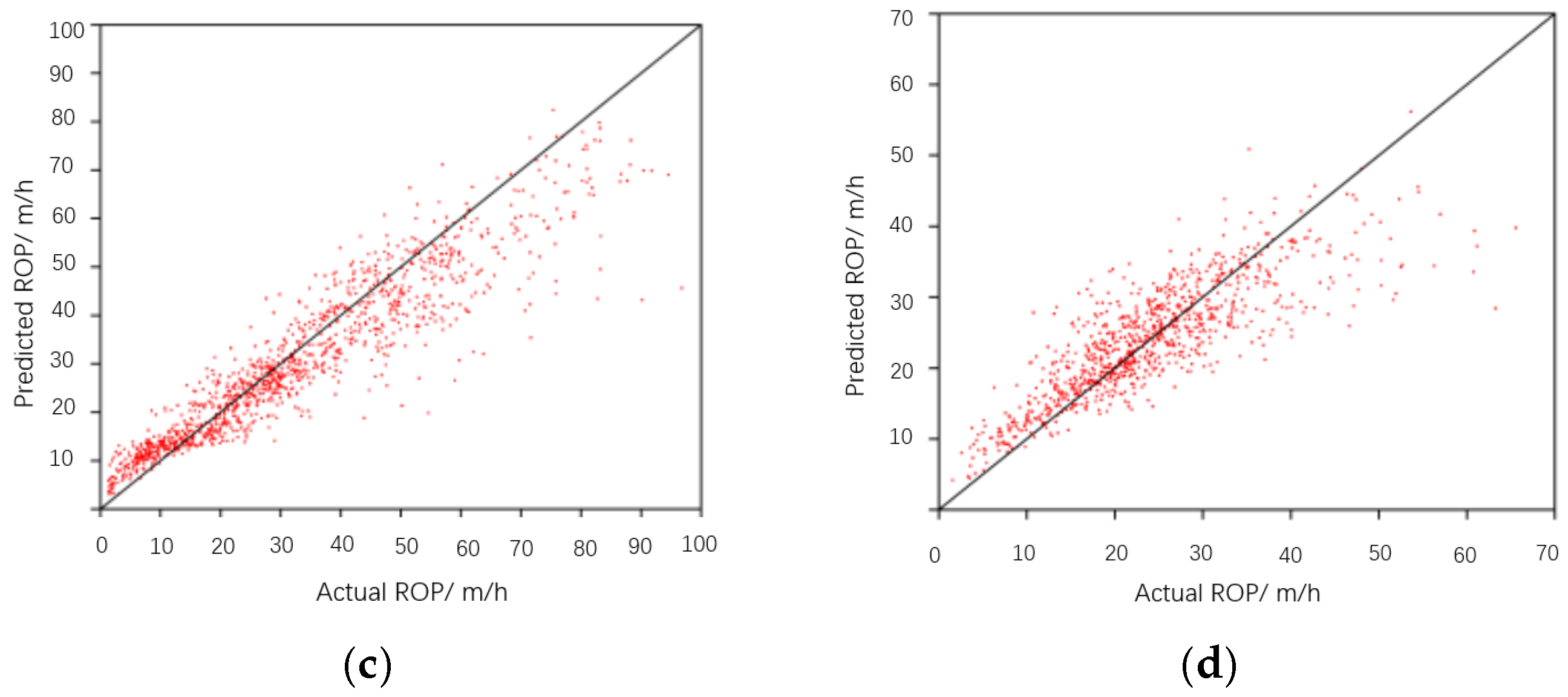
4.3. Generalization Ability Test of ROP Prediction Model
5. ROP Predictive Model Applications
5.1. Geological Profile
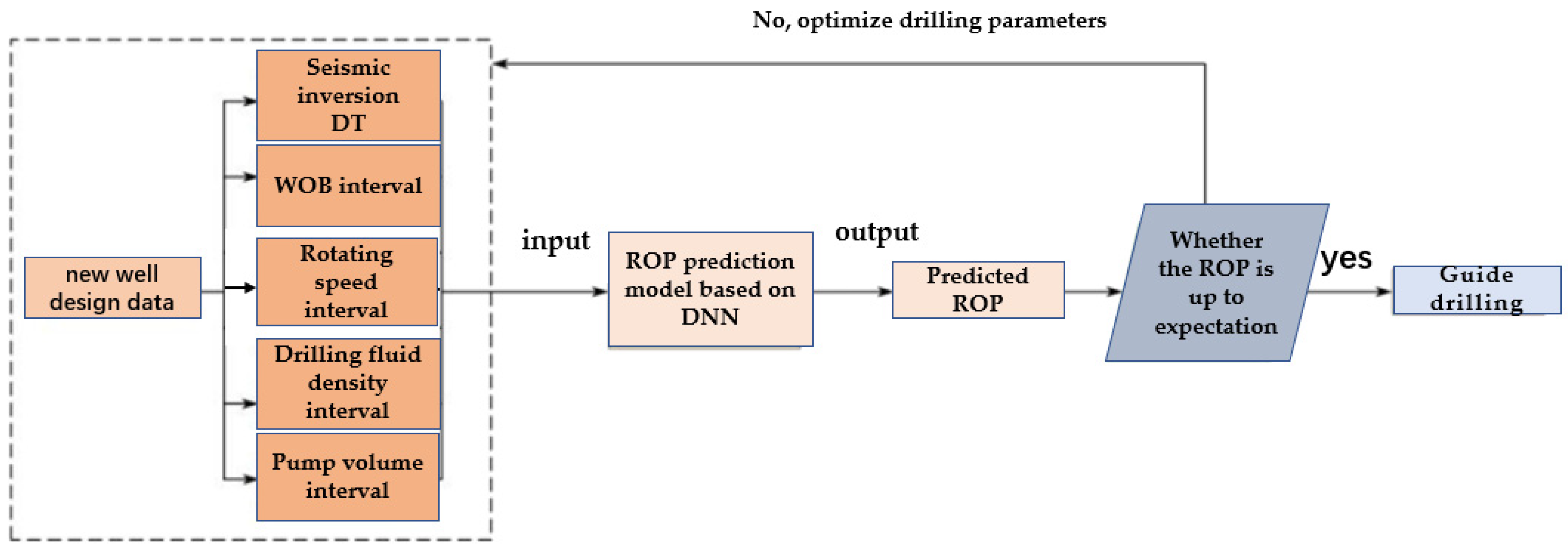
5.2. Drilling Parameter Optimization Process
- Collection of design data of new well: use seismic method to invert the acoustic time data in the new well of the Liushagang Formation, and find the drilling parameter interval based on the design data of the new well and the history data of the completed adjacent wells.
- Prediction of ROP: take the design data as the input of the model and bring it into the DNN ROP prediction model for prediction.
- ROP judgment: the field operator judges whether the predicted ROP results meet the engineering expectations.
- Drilling parameter optimization: adjust the drilling parameters of the well section where the predicted ROP does not meet the engineering expectations, and adjust the main control factors according to the analysis results of the factors affecting the ROP in different layers of the Liushagang Formation.
- Re-prediction of ROP: the adjusted drilling parameters and unknown variables are taken as the input of the model and brought into the ROP prediction model based on DNN for prediction.
- Guide drilling: after the predicted ROP meets the actual engineering expectations, drill with the optimized drilling parameters.
6. Conclusions
- The ROP of the Liushagang Formation is mainly affected by stratigraphic lithology, and the controlling parameters on ROP are highly related to stratigraphic properties.
- The prediction model of ROP based on DNN shows good generalization ability and can meet the requirement of drilling engineering with a high enough accuracy.
- We also developed a framework or workflow for drilling parameter optimization. This workflow was validated by the simulation using data from the real field, and it can guide the optimization of drilling parameters to effectively improve the drilling speed.
- Compared with other data-driven ROP prediction models, the model developed in this work takes the formation conditions into account, and the prediction accuracy in complex formations can meet the requirements. However, the formation situation is more complex, and it is far from enough to replace the formation situation with the acoustic transit time only. Other parameters need to be added to the model to better describe the formation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Astakhov, V.P. Chapter 12—Drilling. In Modern Machining Technology; Paulo Davim, J., Ed.; Woodhead Publishing: Sawston, UK, 2011; pp. 79–212. [Google Scholar]
- Maurer, W.C. The “perfect-cleaning” theory of rotary drilling. J. Pet. Technol. 1962, 14, 1270–1274. [Google Scholar] [CrossRef]
- Bingham, G. A new approach to interpreting rock drillability. Tech. Man. Repr. Oil Gas J. 1965, 93 P, 1965. [Google Scholar]
- Bourgoyne, A.T., Jr.; Young, F.S., Jr. A multiple regression approach to optimal drilling and abnormal pressure detection. Soc. Pet. Eng. J. 1974, 14, 371–384. [Google Scholar] [CrossRef]
- Warren, T.M. Penetration rate performance of roller cone bits. SPE Drill. Eng. 1987, 2, 9–18. [Google Scholar] [CrossRef]
- Hareland, G.; Rampersad, P.R. Drag-bit model including wear. In Proceedings of the SPE Latin America/Caribbean Petroleum Engineering Conference, Buenos Aires, Argentina, 27–29 April 1994. [Google Scholar]
- Motahhari, H.R.; Hareland, G.; James, J.A. Improved drilling efficiency technique using integrated PDM and PDC bit parameters. J. Can. Pet. Technol. 2010, 49, 45–52. [Google Scholar] [CrossRef]
- Mendes, J.R.P.; Fonseca, T.C.; Serapião, A.B.S. Applying a neuro-model reference adaptive controller in drilling optimization. World Oil Mag. 2007, 228, 29–38. [Google Scholar]
- Soares, C.; Daigle, H.; Gray, K. Evaluation of PDC bit ROP models and the effect of rock strength on model coefficients. J. Nat. Gas Sci. Eng. 2016, 34, 1225–1236. [Google Scholar] [CrossRef]
- Bilgesu, H.I.; Tetrick, L.T.; Altmis, U.; Mohaghegh, S.; Ameri, S. A new approach for the prediction of rate of penetration (ROP) values. In Proceedings of the SPE Eastern Regional Meeting, Lexington, Kentucky, 23–25 October 1997. [Google Scholar]
- Moran, D.; Hani, I.; Purwanto, A. Sophisticated ROP prediction technologies based on neural networks delivers accurate drill time result. In Proceedings of the SPE Asia Pacific Drilling Technology Conference and Exhibition, Ho Chi Minh City, Vietnam, 1 November 2010. [Google Scholar]
- Al-Abduljabbsr, A.; Elkatatny, S.; Abdulhamid Mahmoud, A.; Moussa, T.; Al-Shehri, D.; Abughaban, M.; Al-Yami, A. Prediction of the Rate Penetration while Drilling Horizontal Carbonate Reservoirs Using a Self-Adaptive Artificial Neural Network Technique. Sustainability 2020, 12, 1376. [Google Scholar] [CrossRef] [Green Version]
- Moraveji, M.K.; Naderi, M. Drilling rate of penetration prediction and optimization using response surface methodology and bat algorithm. J. Nat. Gas Sci. Eng. 2016, 31, 829–841. [Google Scholar] [CrossRef]
- Amer, M.M.; Dahab, A.S.; El-Sayed, A.-A.H. An ROP Predictive Model in Nile Delta Area Using Artificial Neural Networks. In Proceedings of the SPE Kingdom of Saudi Arabia Annual Technical Symposium and Exhibition, Dammam, Saudi Arabia, 24–27 April 2017. [Google Scholar]
- Hegde, C.; Daigle, H.; Millwater, H.; Gray, K. Analysis of rate of penetration (ROP) prediction in drilling using physics-based and data-driven models. J. Pet. Sci. Eng. 2017, 159, 295–306. [Google Scholar] [CrossRef]
- Abdulmalek, A.S.; Elkatatny, S.; Abdulraheem, A.; Mahmoud, M.; Abdulwahab, Z.A.; Mohamed, I.M. Prediction of rate of penetration of deep and tight formation using support vector machine. In Proceedings of the SPE Kingdom of Saudi Arabia Annual Technical Symposium and Exhibition, Dammam, Saudi Arabia, 23–26 April 2018. [Google Scholar]
- Abbas, A.K.; Rushdi, S.; Alsaba, M. Modeling rate of penetration for deviated wells using artificial neural network. In Proceedings of the Abu Dhabi International Petroleum Exhibition & Conference, Abu Dhabi, United Arab Emirates, 12–15 November 2018. [Google Scholar]
- Ao, L.B.; Jin, Y.; Pang, H.W. Prediction of POR Based on Artificial Neural Network with Long and Short Memory (LSTM). In Proceedings of the 55th U.S. Rock Mechanics/Geomechanics Symposium, Virtual, 18 June 2021. [Google Scholar]
- Ashrafi, S.B.; Anemangely, M.; Sabah, M.; Ameri, M.J. Application of hybrid artificial neural networks for predicting rate of penetration (ROP): A case study from Marun oil field. J. Pet. Sci. Eng. 2019, 175, 604–623. [Google Scholar] [CrossRef]
- Gan, C.; Cao, W.-H.; Wu, M.; Chen, X.; Hu, Y.-L.; Liu, K.-Z.; Wang, F.-W.; Zhang, S.-B. Prediction of drilling rate of penetration (ROP) using hybrid support vector regression: A case study on the Shennongjia area, Central China. J. Pet. Sci. Eng. 2019, 181, 106200. [Google Scholar] [CrossRef]
- Han, J.; Sun, Y.; Zhang, S. A data driven approach of ROP prediction and drilling performance estimation. In Proceedings of the International Petroleum Technology Conference, International Petroleum Technology Conference, Beijing, China, 26–28 March 2019. [Google Scholar]
- Mahmoud, A.A.; Elkatatny, S.; Abouelresh, M.; Abdulraheem, A.; Ali, A. Estimation of the Total Organic Carbon Using Functional Neural Networks and Support Vector Machine. In Proceedings of the 12th International Petroleum Technology Conference and Exhibition, Dhahran, Saudi Arabia, 13–15 January 2020. [Google Scholar]
- Yuan, X.; Yao, G.; Jiang, P.; Lu, J. Provenance Analysis for Liushagang Formation of Wushi Depression, Beibuwan Basin, the South China Sea. Earth Sci. J. China Univ. Geosci. 2017, 042, 2040–2054. [Google Scholar]
- Li, Y.; Wang, K.; Lan, L. Oil and gas differences and their controlling factors of the main sags in the Beibuwan basin. China Offshore Oil Gas 2020, 32, 4–11. [Google Scholar]
- Wang, W.; Ma, Y. Characteristics of Liushagang Formation Petroleum System in Fushan Depression of Beibuwan Basin. Offshore Oil 2003, 23, 1–6. [Google Scholar]
- Li, C.; Zhang, C.; Liang, J.; Zhao, Z.; Xu, Y. Characteristics of fault structure and its control on hydrocarbons in the Beibuwan Basin. J. Pet. 2012, 33, 195–203. [Google Scholar]
- Wu, Y.; Li, J. A new method for determining rock strength envelope—Single block method. Chin. J. Geotech. Eng. 1985, 7, 85–91. [Google Scholar]
- Rooki, R.; Ardejani, F.D.; Moradzadeh, A.; Norouzi, M. CFD Simulation of Rheological Model Effect on Cuttings Transport. J. Dispers. Sci. Technol. 2015, 36, 402–410. [Google Scholar] [CrossRef]
- Fink, J. Chapter 1—Drilling muds. In Petroleum Engineer’s Guide to Oil Field Chemicals and Fluids, 3rd ed.; Gulf Professional Publishing: Houston, TX, USA, 2021. [Google Scholar]
- Zhao, Y.; Wang, P.; Sun, Q.; Feng, D.; Tu, Y. Modeling and experiment of pressure drop on valve section of hydraulic oscillator. J. Pet. Sci. Eng. 2022, 208 Pt A, 109294. [Google Scholar] [CrossRef]
- Ai, C.; Han, Z.; Mu, Z.; Xia, Z.; Tian, H.; Xian, H. Research and Application of Automatic Vertical Drilling System. In Proceedings of the IADC/SPE Asia Pacific Drilling Technology Conference and Exhibition, Tianjin, China, 9–11 July 2012. [Google Scholar]
- Li, B.; Aljohar, A.; Zhan, G.; Sehsah, O.; Otaibi, A.; Suo, Z. ROP Enhancement in High Mud Weight Applications Using Rotary Percussion Drilling. In Proceedings of the Abu Dhabi International Petroleum Exhibition & Conference, Abu Dhabi, United Arab Emirates, 9–12 November 2020. [Google Scholar]
- Tang, L.; Yao, H.; Wang, C. Development of remotely operated adjustable stabilizer to improve drilling efficiency. J. Solid-State Chem. 2021, 303. [Google Scholar] [CrossRef]
- Geoffroy, H.; Minh, D.N.; Bergues, J.; Putot, C. Frictional Contact on Cutters Wear Flat and Evaluation of Drilling Parameters of a PDC Bit. In Proceedings of the SPE/ISRM Rock Mechanics in Petroleum Engineering, Trondheim, Norway, 8–10 July 1998. [Google Scholar]
- Yan, T.; Xu, R.; Sun, W.; Liu, W.; Hou, Z.; Yuan, Y.; Shao, Y. Similarity evaluation of stratum anti-drilling ability and a new method of drill bit selection. Pet. Explor. Dev. 2021, 48, 450–459. [Google Scholar] [CrossRef]
- Reddy, H.; Kar, A.; Østergaard, J. Performance analysis of low complexity fully connected neural networks for monaural speech enhancement. Appl. Acoust. 2022, 190, 108627. [Google Scholar] [CrossRef]
- JayaLakshmi, A.N.M.; Krishna Kishore, K.V. Performance evaluation of DNN with other machine learning techniques in a cluster using Apache Spark and MLlib. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 1311–1319. [Google Scholar] [CrossRef]
- Yang, J.; Zu, Y.; Duan, Z.; Huang, K.; Huang, Y.; Guo, Y. On Predicting SDT of Formation Bellow Borehole Bottom with Seismic Horizon Velocity. Logging Technol. 2006, 30, 208–210. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Hinton, G.E.; Srivastava, N.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R.R. Improving neural networks by preventing co-adaptation of feature detectors. arXiv 2012, arXiv:1207.0580. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stratum | Main Control Factors | Recommended Range |
|---|---|---|
| Section 1 of Liushagang Formation and upper part of Section 2 of Liushagang Formation | Rotating speed Drilling fluid density | [110, 120] r/min [1.33, 1.35] g/cm3 |
| Lower part of Section 2 of Liushagang Formation | WOB | [60, 90] kN |
| Section 3 of Liushagang Formation | WOB Rotating speed | [70, 90] kN [100, 120] r/min |
| Name | Setting |
|---|---|
| Weights | normal distribution |
| Bias | 0.1 |
| Activation function | ReLU |
| Test Well | Original Dataset | Training Set | Test Set |
|---|---|---|---|
| X-1 | 4155 | 3373 | 782 |
| X-2 | 4155 | 2974 | 1181 |
| X-3 | 4155 | 2908 | 1247 |
| X-4 | 4155 | 3210 | 945 |
| Hyperparameters | Setting |
|---|---|
| batch size | 100 |
| epoch | 100 |
| learning rate | 0.003 |
| learning rate decay rate | 0.15 |
| Well | Test Data | Average Relative Error |
|---|---|---|
| X-1 | 782 | 16.59% |
| X-2 | 1181 | 14.06% |
| X-3 | 1249 | 15.32% |
| X-4 | 945 | 14.95% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Jin, Y.; Zhang, W.; Zhang, J.; Ma, L.; Lu, Y. Deep Neural Network Prediction of Mechanical Drilling Speed. Energies 2022, 15, 3037. https://doi.org/10.3390/en15093037
Chen H, Jin Y, Zhang W, Zhang J, Ma L, Lu Y. Deep Neural Network Prediction of Mechanical Drilling Speed. Energies. 2022; 15(9):3037. https://doi.org/10.3390/en15093037
Chicago/Turabian StyleChen, Haodong, Yan Jin, Wandong Zhang, Junfeng Zhang, Lei Ma, and Yunhu Lu. 2022. "Deep Neural Network Prediction of Mechanical Drilling Speed" Energies 15, no. 9: 3037. https://doi.org/10.3390/en15093037