
Deep-Learning-Based Pitch Controller for Floating Offshore Wind Turbine Systems with Compensation for Delay of Hydraulic Actuators


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
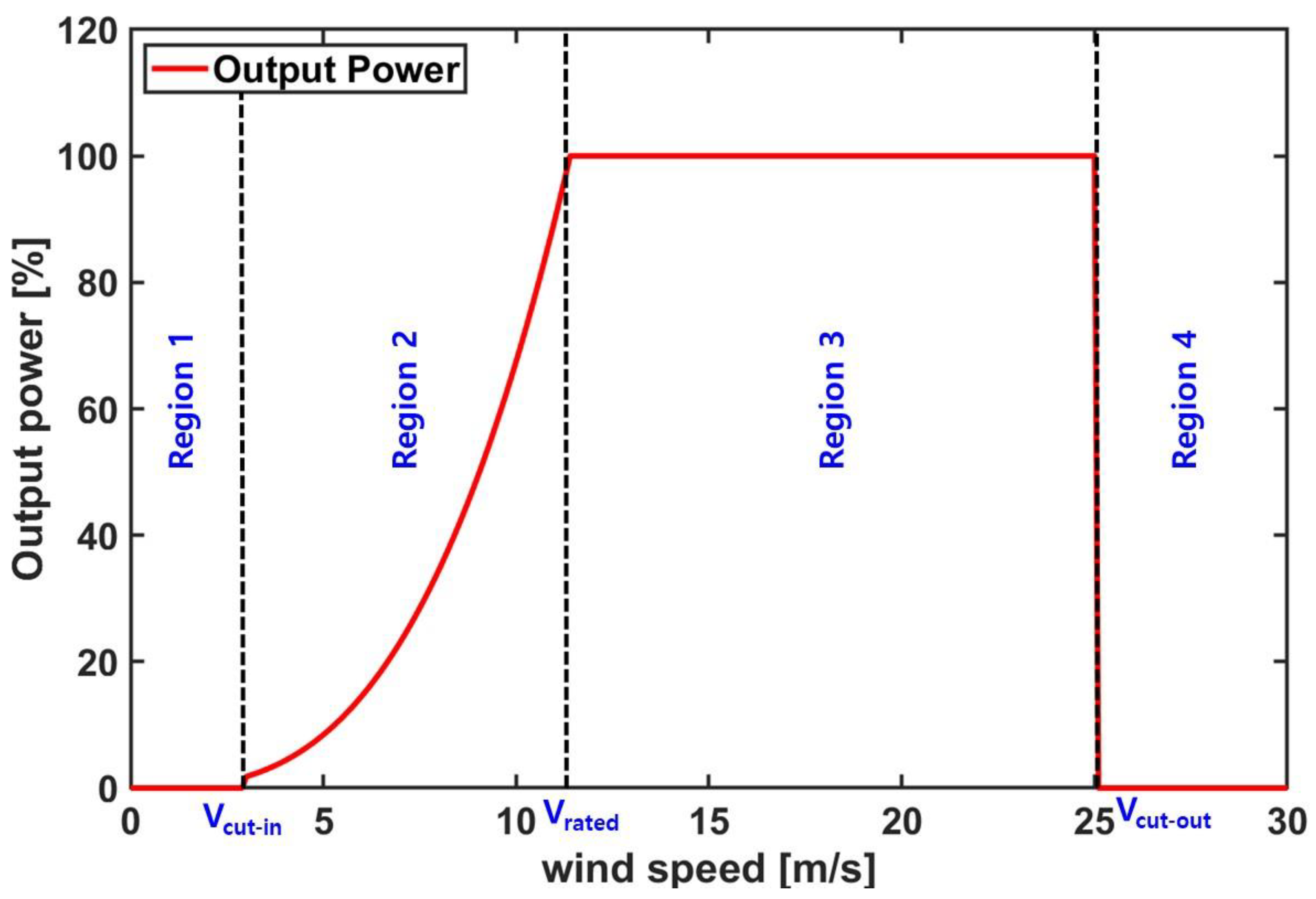
2. Principle and Limitations of Pitch Control Systems
3. Materials and Methods
3.1. Pitch Control Angle Prediction System with Deep Learning Algorithm
3.2. Setup for Evaluative Simulation
4. Results and Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Rotor power (Mechanical power) | |
| Turbine coefficient | |
| length of rotor blades | |
| Density of air | |
| Tip speed ratio | |
| Wind speed | |
| Rotational speed of rotor | |
| Mechanical torque | |
| Tip speed ratio | |
| N | Gear ratio |
| Drivetrain inertia | |
| Rated low-speed shaft rotational speed | |
| Natural frequency of PI controller | |
| Damping ratio of PI controller | |
| Rotor-collective blade-pitch angle | |
| Blade-pitch angle which sensitivity has doubled | |
| Gain-correction factor | |
| Rotational speed of generator | |
| Reference rotational speed of generator | |
| Proportional gain of PI controller | |
| Integral gain of PI controller | |
| Reference blade pitch angle |
References
- Ohlenforst, K.; Sawyer, S.; Dutton, A.; Backwel, B.; Fiestas, R.; Lee, J.; Qiao, L.; Zhao, F.; Balachandran, N. GWEC Global Wind Report 2018; Technical Report; Global Wind Energy Council (GWEC): Brussels, Belgium, 2019. [Google Scholar]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine; Technical Report NREL/TP-500-41958; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2007. [Google Scholar] [CrossRef] [Green Version]
- Cruciani, M. The expansion of offshore wind power in the North Sea: A strategic opportunity for the European Union. Econ. Policy Energy Environ. 2019, 1, 5–28. [Google Scholar] [CrossRef]
- International Electrotechnical Commission Technical Committee 88: Wind Turbines. Wind Turbines—Part 3: Design Requirements for Offshore Wind Turbines; International Standard IEC 61400-3:2009; International Electrotechnical Commission: Geneva, Switzerland, 2009. [Google Scholar]
- Skaare, B.; Hanson, T.D.; Nielsen, F.G. Importance of control strategies on fatigue life of floating wind turbines. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007; pp. 493–500. [Google Scholar] [CrossRef]
- Soriano, L.; Yu, W.; Rubio, J.d.J. Modeling and control of wind turbine. Math. Probl. Eng. 2013, 2013, 982597. [Google Scholar] [CrossRef]
- Suryanarayanan, S.; Dixit, A. On the dynamics of the pitch control loop in horizontal-axis large wind turbines. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005; Volume 1, pp. 686–690. [Google Scholar] [CrossRef]
- Cross, P.; Ma, X. Nonlinear system identification for model-based condition monitoring of wind turbines. Renew. Energy 2014, 71, 166–175. [Google Scholar] [CrossRef] [Green Version]
- Mérida, J.; Aguilar, L.T.; Dávila, J. Analysis and synthesis of sliding mode control for large scale variable speed wind turbine for power optimization. Renew. Energy 2014, 71, 715–728. [Google Scholar] [CrossRef]
- Boukhezzar, B.; Lupu, L.; Siguerdidjane, H.; Hand, M. Multivariable control strategy for variable speed, variable pitch wind turbines. Renew. Energy 2007, 32, 1273–1287. [Google Scholar] [CrossRef]
- Wu, D.; Wang, Z. Modeling and design of control system for variable speed wind turbine in all operating region. Int. J. Syst. Appl. Eng. Dev. 2007, 3, 62–68. [Google Scholar]
- Duong, M.Q.; Grimaccia, F.; Leva, S.; Mussetta, M.; Ogliari, E. Pitch angle control using hybrid controller for all operating regions of SCIG wind turbine system. Renew. Energy 2014, 70, 197–203. [Google Scholar] [CrossRef]
- Yin, X.; Lin, Y.; Li, W.; Gu, Y.; Wang, X.; Lei, P. Design, modeling and implementation of a novel pitch angle control system for wind turbine. Renew. Energy 2015, 81, 599–608. [Google Scholar] [CrossRef]
- Oh, K.; Park, J.; Lee, J.; Lee, J. Implementation of a torque and a collective pitch controller in a wind turbine simulator to characterize the dynamics at three control regions. Renew. Energy 2015, 79, 150–160. [Google Scholar] [CrossRef]
- Bossoufi, B.; Karim, M.; Lagrioui, A.; Taoussi, M.; Derouich, A. Observer back stepping control of DFIG-generators for wind turbines variable-speed: FPGA-based implementation. Renew. Energy 2015, 81, 903–917. [Google Scholar] [CrossRef]
- Larsen, T.J.; Hanson, T.D. A method to avoid negative damped low frequent tower vibrations for a floating, pitch controlled wind turbine. J. Phys. Conf. Ser. 2007, 75, 012073. [Google Scholar] [CrossRef]
- Salma, T.; Yokeeswaran, R. Pitch control of DFIG based wind energy conversion system for maximum power point tracking. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2013, 2, 6373–6381. [Google Scholar]
- Fakharzadeh, A.; Jamshidi, F.; Talebnezhad, L. New approach for optimizing energy by adjusting the trade-off coefficient in wind turbines. Energy Sustain. Soc. 2013, 3, 19. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Chung, I.; Moon, S. Tuning of the PI controller parameters of a PMSG wind turbine to improve control performance under various wind speeds. Energies 2015, 8, 1406–1425. [Google Scholar] [CrossRef] [Green Version]
- Silva, G.J.; Datta, A.; Bhattacharyya, S.P. New results on the synthesis of PID controllers. IEEE Trans. Automat. Contr. 2002, 47, 241–252. [Google Scholar] [CrossRef]
- Gao, R.; Gao, Z. Pitch control for wind turbine systems using optimization, estimation and compensation. Renew. Energy 2016, 91, 501–515. [Google Scholar] [CrossRef]
- Wang, J.; Tse, N.; Gao, Z. Synthesis on PI-based pitch controller of large wind turbines generator. Energy Convers. Manag. 2011, 52, 1288–1294. [Google Scholar] [CrossRef]
- Perng, J.; Chen, G.; Hsieh, S. Optimal PID controller design based on PSO-RBFNN for wind turbine systems. Energies 2014, 7, 191–209. [Google Scholar] [CrossRef] [Green Version]
- Fadare, D.A. The application of artificial neural networks to mapping of wind speed profile for energy application in Nigeria. Appl. Energy 2010, 87, 934–942. [Google Scholar] [CrossRef]
- Asrari, A.; Wu, T.X.; Ramos, B. A hybrid algorithm for short-term solar power prediction—Sunshine State case study. IEEE Trans. Sustain. Energy 2017, 8, 582–591. [Google Scholar] [CrossRef]
- Mendonça de Paiva, G.; Pires Pimentel, S.; Pinheiro Alvarenga, B.; Gonçalves Marra, E.; Mussetta, M.; Leva, S. Multiple site intraday solar irradiance forecasting by machine learning algorithms: MGGP and MLP neural networks. Energies 2020, 13, 3005. [Google Scholar] [CrossRef]
- Hu, J.; Wang, J.; Zeng, G. A hybrid forecasting approach applied to wind speed time series. Renew. Energy 2013, 60, 185–194. [Google Scholar] [CrossRef]
- Costa, A.; Crespo, A.; Navarro, J.; Lizcano, G.; Madsen, H.; Feitosa, E. A review on the young history of the wind power short-term prediction. Renew. Sustain. Energy Rev. 2008, 12, 1725–1744. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.; Liu, T.; Ullah, F. A new hybrid approach to forecast wind power for large scale wind turbine data using deep learning with TensorFlow framework and principal component analysis. Energies 2009, 12, 2229. [Google Scholar] [CrossRef] [Green Version]
- Mujeeb, S.; Alghamdi, T.A.; Ullah, S.; Fatima, A.; Javaid, N.; Saba, T. Exploiting deep learning for wind power forecasting based on big data analytics. Appl. Sci. 2019, 9, 4417. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.; Chu, J.; Guo, P.; Chen, Z. Condition monitoring of wind turbine gearbox bearing based on deep learning model. IEEE Access 2019, 7, 57078–57087. [Google Scholar] [CrossRef]
- Li, M.; Wang, S.; Fang, S.; Zhao, J. Anomaly detection of wind turbines based on deep small-world neural network. Appl. Sci. 2020, 10, 1243. [Google Scholar] [CrossRef] [Green Version]
- Jie, W.; Jingchun, C.; Lin, Y.; Wenliang, W.; Jian, D. Pitch control of wind turbine based on deep neural network. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Changchun, China, 2020; Volume 619, p. 012034. [Google Scholar]
- Zhang, Z.; Zhang, D.; Qiu, R.C. Deep reinforcement learning for power system applications: An overview. CSEE J. Power Energy Syst. 2019, 6, 213–225. [Google Scholar]
- Lin, Z.; Liu, X. Assessment of wind turbine aero-hydroservo-elastic modelling on the effects of mooring line tension via deep learning. Energies 2020, 13, 2264. [Google Scholar] [CrossRef]
- Sierra-Garcia, J.E.; Santos, M. Exploring reward strategies for wind turbine pitch control by reinforcement learning. Appl. Sci. 2020, 10, 7462. [Google Scholar] [CrossRef]
- Sierra, J.E.; Santos, M. Modelling engineering systems using analytical and neural techniques: Hybridization. Neurocomputing 2018, 271, 70–83. [Google Scholar] [CrossRef]
- Sierra-Garcia, J.E.; Santos, M. Switched learning adaptive neuro-control strategy. Neurocomputing 2021, 452, 450–464. [Google Scholar] [CrossRef]
- Chavero-Navarrete, E.; Trejo-Perea, M.; Jauregui-Correa, J.C.; Carrillo-Serrano, R.V.; Ronquillo-Lomeli, G.; Rios-Moreno, J.G. Hierarchical pitch control for small wind turbines based on fuzzy logic and anticipated wind speed measurement. Appl. Sci. 2020, 10, 4592. [Google Scholar] [CrossRef]
- Moodi, H.; Bustan, D. Wind turbine control using TS systems with nonlinear consequent parts. Energy 2019, 172, 922–931. [Google Scholar] [CrossRef]
- Ngo, Q.V.; Chai, Y.; Nguyen, T.T. The fuzzy-PID based-pitch angle controller for small-scale wind turbine. Int. J. Power Electron. Drive Syst. 2020, 11, 135. [Google Scholar] [CrossRef] [Green Version]
- Iqbal, A.; Ying, D.; Saleem, A.; Hayat, M.A.; Mehmood, K. Efficacious pitch angle control of variable-speed wind turbine using fuzzy based predictive controller. Energy Rep. 2020, 6, 423–427. [Google Scholar] [CrossRef]
- Sitharthan, R.; Karthikeyan, M.; Sundar, D.S.; Rajasekaran, S. Adaptive hybrid intelligent MPPT controller to approximate effectual wind speed and optimal rotor speed of variable speed wind turbine. ISA Trans. 2020, 96, 479–489. [Google Scholar] [CrossRef]
- Rubio, P.M.; Quijano, J.F.; López, P.Z. Intelligent control for improving the efficiency of a hybrid semi- submersible platform with wind turbine and wave energy converters. Rev. Iberoam. Automa Tica E Inf. Tica Ind. 2019, 16, 480–491. [Google Scholar]
- Wang, L.; Zuo, S.; Song, Y.D.; Zhou, Z. Variable torque control of offshore wind turbine on spar floating platform using advanced RBF neural network. Abstr. Appl. Anal. 2014, 2014, 903493. [Google Scholar] [CrossRef] [Green Version]
- Dahbi, A.; Nait-Said, N.; Nait-Said, M. A novel combined MPPT-pitch angle control for wide range variable speed wind turbine based on neural network. Int. J. Hydrogen Energy 2016, 41, 9427–9442. [Google Scholar] [CrossRef]
- Cheng, J.; Dong, L.; Lapata, M. Long short-term memory-networks for machine reading. arXiv 2016, arXiv:1601.06733. [Google Scholar]
- Jonkman, J.M.; Buhl, M.L., Jr. FAST User’s Guide; National Renewable Energy Laboratory: Golden, CO, USA, 2005; Volume 365, p. 366. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report NREL/TP-500-38060; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009. [Google Scholar] [CrossRef] [Green Version]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; Technical Report NREL/TP-5000-60601; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2014. [Google Scholar] [CrossRef] [Green Version]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roh, C. Deep-Learning-Based Pitch Controller for Floating Offshore Wind Turbine Systems with Compensation for Delay of Hydraulic Actuators. Energies 2022, 15, 3136. https://doi.org/10.3390/en15093136
Roh C. Deep-Learning-Based Pitch Controller for Floating Offshore Wind Turbine Systems with Compensation for Delay of Hydraulic Actuators. Energies. 2022; 15(9):3136. https://doi.org/10.3390/en15093136
Chicago/Turabian StyleRoh, Chan. 2022. "Deep-Learning-Based Pitch Controller for Floating Offshore Wind Turbine Systems with Compensation for Delay of Hydraulic Actuators" Energies 15, no. 9: 3136. https://doi.org/10.3390/en15093136
APA StyleRoh, C. (2022). Deep-Learning-Based Pitch Controller for Floating Offshore Wind Turbine Systems with Compensation for Delay of Hydraulic Actuators. Energies, 15(9), 3136. https://doi.org/10.3390/en15093136