

Self-Sensing Control of Open-End Winding PMSMs Fed by an Asymmetrical Hybrid Multilevel Inverter

 ,
,  ,
,
Abstract
:1. Introduction
2. Asymmetrical Hybrid Multilevel Inverter
2.1. MLI Step Modulation
2.2. TLI Pulse Width Modulation
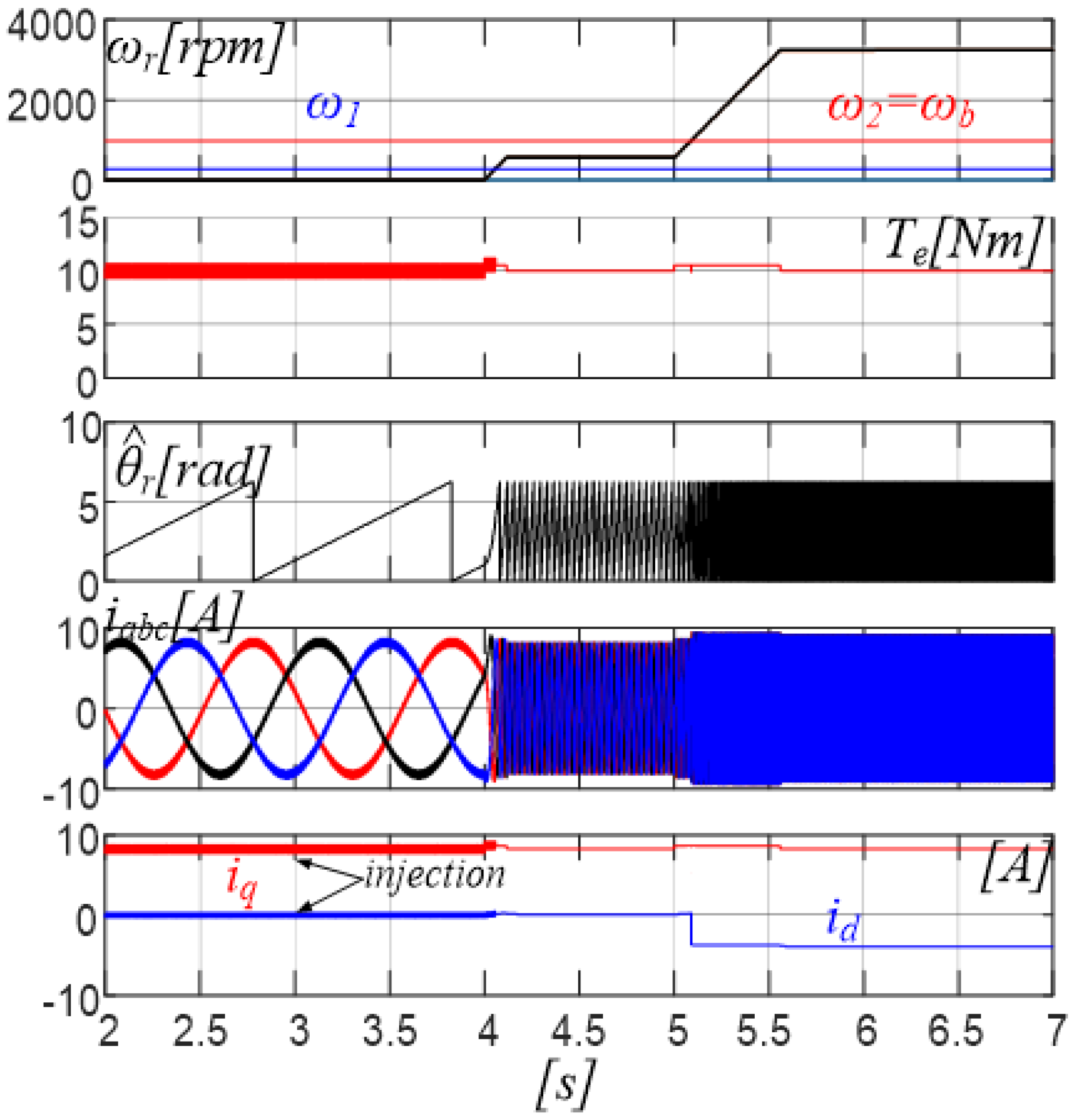
3. Sensorless Control Strategy
3.1. High Frequency Injection: 0 < ωr < ω1
3.2. Back-EMF Estimation: ω1 < ωr < ω2
3.3. Flux Weakening: ωr > ω2
4. Performance Evaluation
5. Power Losses Assessment
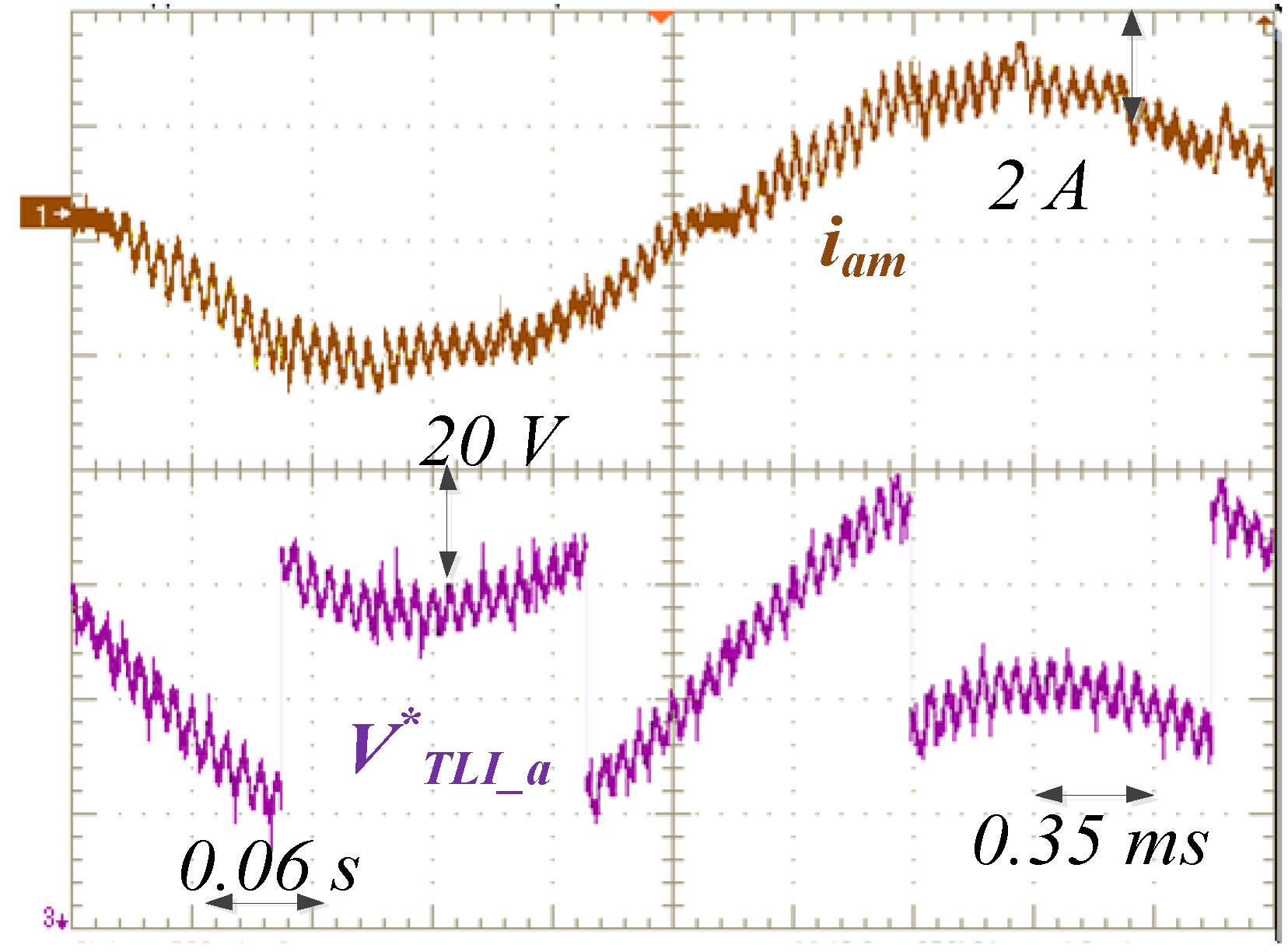
- low-speed (47 rpm) operation with HF injection and PWM voltage modulation,
- medium-speed (954 rpm) operation with back-EMF estimation and PWM voltage modulation,
- flux-weakening (2387 rpm) operations with back-EMF estimation and step voltage modulation.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kouro, S.; Malinowski, M.; Gopakumar, K.; Pou, J.; Franquelo, L.G.; Wu, B.; Rodriguez, J.; Perez, M.A.; Leon, J.I. Recent Advances and Industrial Applications of Multilevel Converters. IEEE Trans. Ind. Electron. 2010, 57, 2553–2580. [Google Scholar] [CrossRef]
- Wang, M.; Hu, Y.; Zhao, W.; Wang, Y.; Chen, G. Application of modular multilevel converter in medium voltage high power permanent magnet synchronous generator wind energy conversion systems. IET Renew. Power Gener. 2010, 25, 1786–1799. [Google Scholar] [CrossRef]
- Hagiwara, M.; Nishimura, K.; Akagi, H. A Medium-Voltage Motor Drive with a Modular Multilevel PWM Inverter. IEEE Trans. Power Electron. 2016, 10, 324–833. [Google Scholar]
- Kaarthik, R.S.; Gopakumar, K.; Mathey, J.; Underland, T. Medium Voltage Drive for Induction Machine with Multilevel Dodeca-gon Voltage Space Vectors with Symmetric Triangles. IEEE Trans. Ind. Electron. 2014, 62, 79–87. [Google Scholar] [CrossRef]
- Nabae, A.; Takahashi, I.; Akagi, H. A New Neutral-Point-Clamped PWM Inverter. IEEE Trans. Ind. Appl. 1981, IA-17, 518–523. [Google Scholar] [CrossRef]
- Bhagwat, P.M.; Stefanovic, V.R. Generalized structure of a multi-level PWM inverter. IEEE Trans. Ind. Appl. 1983, IA-19, 1057–1069. [Google Scholar] [CrossRef]
- Lai, J.-S.; Peng, F.Z. Multi-level converters-A new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar]
- Okazaki, Y.; Matsui, H.; Muhoro, M.M.; Hagiwara, M.; Akagi, H. Capacitor-Voltage Balancing for a Modular Multilevel DSCC Inverter Driving a Medium-Voltage Synchronous Motor. IEEE Trans. Ind. Appl. 2016, 52, 4074–4083. [Google Scholar] [CrossRef]
- Cacciato, M.; Consoli, A.; Scarcella, G.; Testa, A. Reduction of common-mode currents in PWM inverter motor drives. In Proceedings of the 1997 IEEE Industry Applications Conference 32nd IAS Annual Meeting, New Orleans, LA, USA, 5–9 October 1997; Volume 1, pp. 707–714. [Google Scholar]
- Mohapatra, K.K.; Gopakumar, K.; Somasekhar, V.T.; Umanand, L. A harmonic elimination and suppression scheme for an open-end winding induction motor drive. IEEE Trans. Ind. Electron. 2003, 50, 1187–1198. [Google Scholar] [CrossRef]
- Foti, S.; Testa, A.; Scelba, G.; Cacciato, M.; Scarcella, G.; De Caro, S.; Scimone, T. Overvoltage mitigation in open-end winding AC motor drives. In Proceedings of the 2015 International Conference on Renewable Energy Research and Applications (ICRERA), Palermo, Italy, 22–25 November 2015; pp. 238–245. [Google Scholar]
- Scelba, G.; Scarcella, G.; Foti, S.; Testa, A.; De Caro, S.; Scimone, T. An Open-end Winding approach to the design of multi-level multi-motor drives. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 5026–5032. [Google Scholar]
- Edpuganti, A.; Rathore, A.K. New Optimal Pulse Width Modulation for Single DC-Link Dual-Inverter Fed Open-End Stator Winding Induction Motor Drive. IEEE Trans. Power Electron. 2015, 30, 4386–4393. [Google Scholar] [CrossRef]
- Somasekhar, V.T.; Gopakumar, K.; Bajiu, M.R.; Mohapatra, K.K.; Umanand, L. A multilevel inverter system for an inductor motor with open-end windings. IEEE Trans. Ind. Electron. 2015, 52, 824–836. [Google Scholar] [CrossRef] [Green Version]
- Srinivas, S.; Sekhar, K.R. Theoretical and Experimental Analysis for Current in a Dual-Inverter-Fed Open-End Winding Induction Motor Drive with Reduced Switching PWM. IEEE Trans. Ind. Electron. 2012, 60, 4318–4328. [Google Scholar] [CrossRef]
- Ge, B.; Peng, F.Z.; de Almeida, A.T.; Abu-Rub, H. An Effective Control Technique for Medium-Voltage High Power Induction Motor Fed by Cascaded Neutral Point Clamped Inverter. IEEE Trans. Ind. Electron. 2010, 57, 2659–2668. [Google Scholar]
- Alves, J.A.; Torri, P.; da Cunha, G. Medium Voltage Industrial Variable Speed Drives. Pulse 2009, 6, 8. [Google Scholar]
- Scarcella, G.; Scelba, G.; Testa, A. High performance sensorless controls based on HF excitation: A viable solution for future AC motor drives? In Proceedings of the 2015 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Torino, Italy, 26–27 March 2015; pp. 178–187. [Google Scholar]
- Consoli, A.; Scarcella, G.; Testa, A. Slip-Frequency Detection for Indirect Field-Oriented Control Drives. IEEE Trans. Ind. Appl. 2004, 40, 194–201. [Google Scholar] [CrossRef]
- Wang, S.; Lu, Z. Study on Wide Range Robust Speed Sensorless Control of Medium Voltage Induction Motor. In Proceedings of the Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 1542–1546. [Google Scholar]
- Shukla, R.D.; Tripathi, R.K. Speed-sensorless voltage & frequency control in autonomous DFIG based wind energy systems. In Proceedings of the 2014 Australasian Universities Power Engineering Conference (AUPEC), Perth, Australia, 28 September–1 October 2014; pp. 1–6. [Google Scholar]
- Jansen, P.L.; Lorenz, R.D. A physically insightful approach to the design and accuracy assessment of flux observers for field oriented induction machine drives. IEEE Trans. Ind. Appl. 1994, 30, 101–110. [Google Scholar] [CrossRef] [Green Version]
- Degner, M.W.; Lorenz, R.D. Using Multiple Saliencies for the Estimation of Flux, Position, and Velocity in AC Machines. IEEE Trans. Ind. Appl. 1998, 34, 1097–1104. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.C.; Zhu, Z.Q. Sensorless Operation Capability of Surface-Mounted Permanent-Magnet Machine Based on High-Frequency Signal Injection Methods. IEEE Trans. Ind. Appl. 2015, 51, 2161–2171. [Google Scholar] [CrossRef]
- Foti, S.; Testa, A.; De Caro, S.; Scimone, T.; Pulvirenti, M. Rotor Flux Position Correction and Parameters Estimation on Sen-sorless Multiple Induction Motors Drives. IEEE Trans. Ind. Appl. 2019, 55, 3759–3769. [Google Scholar] [CrossRef]
- Fot, S.; Testa, A.; De Caro, S.; Scimone, T.; Scelba, G.; Scarcella, G. Rotor Time Constant Identification on Sensorless Induction Motor Drives by low Frequency Signal Injection. In Proceedings of the 2018 IEEE 9th International Symposium on Sensorless Control for Electrical Drives (SLED), Helsinki, Finland, 13–14 September 2018; pp. 150–155. [Google Scholar]
- Kshirsagar, P.; Krishnan, R. Sensorless Control of Permanent Magnet Motors Operating at Low Switching Frequency for Climate Control Systems. In Proceedings of the 3rd IEEE International Symposium on Sensorless Control for Electrical Drives (SLED 2012), Milwaukee, WI, USA, 21–22 September 2012; pp. 1–8. [Google Scholar]
- Uddin, N.; Rashid, M.M.; Rubaiyat, M.; Hossain, B.; Salam, S.M.; Nithe, N.A. Comparison of position sensorless control based back-EMF estimators in PMSM. In Proceedings of the 18th International Conference on Computer and Information Technology (ICCIT), Dhaka, Bangladesh, 21–23 December 2015; pp. 5–10. [Google Scholar]
- Halder, S.; Agarwal, P.; Srivastava, S.P. MTPA based Sensorless Control of PMSM using position and speed estimation by Back-EMF method. In Proceedings of the IEEE 6th International Conference on Power Systems (ICPS), New Delhi, India, 4–6 March 2016; pp. 1–4. [Google Scholar]
- Johnson, P.M.; Bai, K.; Ding, X. Back-EMF-Based Sensorless Control Using the Hijacker Algorithm for Full Speed Range of the Motor Drive in Electrified Automobile Systems. IEEE Trans. Transp. Electrif. 2015, 1, 126–137. [Google Scholar] [CrossRef]
- Lin, F.-J.; Hung, Y.-C.; Chang, J.-K. Sensorless IPMSM drive system using saliency back-EMF-based observer with MTPA control. In Proceedings of the International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 3539–3545. [Google Scholar]
- De Caro, S.; Foti, S.; Scimone, T.; Testa, A.; Cacciato, M.; Scarcella, G.; Scelba, G. THD and efficiency improvement in multi-level inverters through an open end winding configuration. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar]
- Foti, S.; Testa, A.; Scelba, G.; De Caro, S.; Cacciato, M.; Scarcella, G.; Scimone, T. An Open End Winding Motor Approach to miti-gate the phase voltage distortion on Multi-Level Inverters. IEEE Trans. Power Electron. 2018, 33, 2404–2416. [Google Scholar] [CrossRef]
- Scelba, G.; Scarcella, G.; Foti, S.; De Caro, S.; Testa, A. Self-sensing control of open-end winding PMSMs fed by an asymmetrical hybrid multilevel inverter. In Proceedings of the IEEE International Symposium on Sensorless Control for Electrical Drives (SLED), Catania, Italy, 18–19 September 2017; pp. 165–172. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated power | 2 kW | λPM | 0.4 Wb |
| Rated torque | 10.8 Nm | Ld | 3.5 mH |
| Maximum speed | 5000 rpm | Lq | 3.5 mH |
| Pole pairs | 3 | Rs | 1.85 Ω |
| Rated voltage | 400 V | J | 0.01 kgm2 |
| Base speed | 1000 rpm |
| Rated voltage | 600 V |
| Rated current | 30 A |
| Collector-emitter saturation voltage | 2 V |
| Turn-on switching losses | 0.35 mJ |
| Turn-off switching losses | 0.4 mJ |
| Rated voltage | 300 V |
| Rated current | 42 A |
| Static drain-source on-resistance | 75 mΩ |
| Rise time | 38 ns |
| Fall time | 46 ns |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Foti, S.; Testa, A.; Scelba, G.; De Caro, S.; Scarcella, G. Self-Sensing Control of Open-End Winding PMSMs Fed by an Asymmetrical Hybrid Multilevel Inverter. Energies 2022, 15, 3166. https://doi.org/10.3390/en15093166
Foti S, Testa A, Scelba G, De Caro S, Scarcella G. Self-Sensing Control of Open-End Winding PMSMs Fed by an Asymmetrical Hybrid Multilevel Inverter. Energies. 2022; 15(9):3166. https://doi.org/10.3390/en15093166
Chicago/Turabian StyleFoti, Salvatore, Antonio Testa, Giacomo Scelba, Salvatore De Caro, and Giuseppe Scarcella. 2022. "Self-Sensing Control of Open-End Winding PMSMs Fed by an Asymmetrical Hybrid Multilevel Inverter" Energies 15, no. 9: 3166. https://doi.org/10.3390/en15093166