
Improvement of Stability in an Oscillating Water Column Wave Energy Using an Adaptive Intelligent Controller

Abstract
:1. Introduction
- (1)
- Presently, the problem of renewable energy grid connection is becoming increasingly important. However, few studies have researched the dynamic and transient phenomena after wave power generation is connected to the power system. Hence, we examined these phenomena.
- (2)
- To increase the robustness of the PMSG-based OWC, an intelligent control algorithm was proposed.
- (3)
- The system generates the signal to the PMSG-based OWC so that the PMSG can better control the power system and have a better dynamic response than other intelligent control algorithms.
2. Analysis of System Models
2.1. Configuration of the PMSG-Based OWC System
2.2. Turbine Model
2.3. PMSG
3. Design of Adaptive Intelligent Controller (AIC)
3.1. Grey Predictor Modeling Approach
3.2. Recurrent Wavelet Elman Neural Network (RWENN)
3.3. Adaptive Critic Network (ACN)
4. Time-Domain Simulations and Discussion
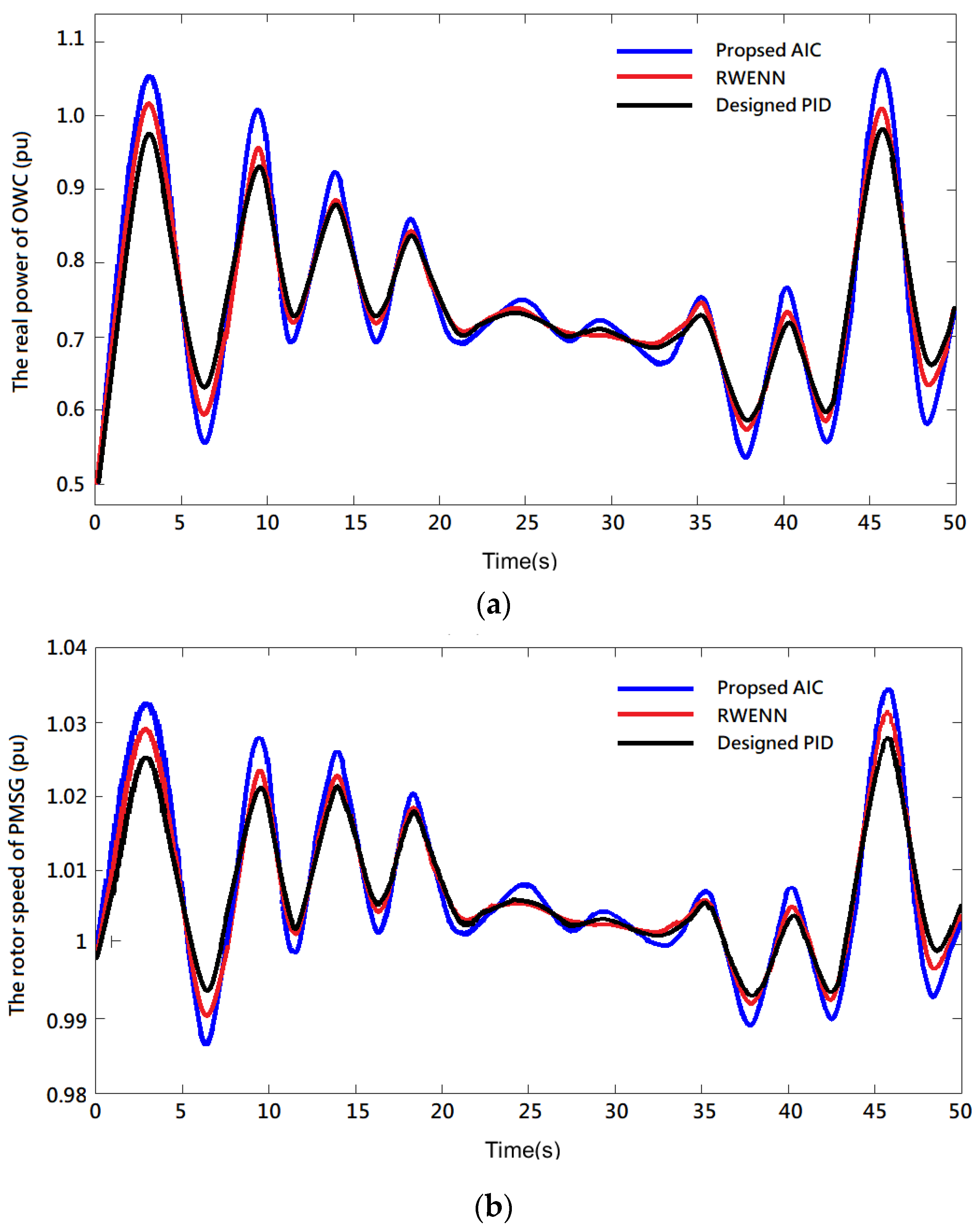
4.1. Random Variable Velocities of OWC
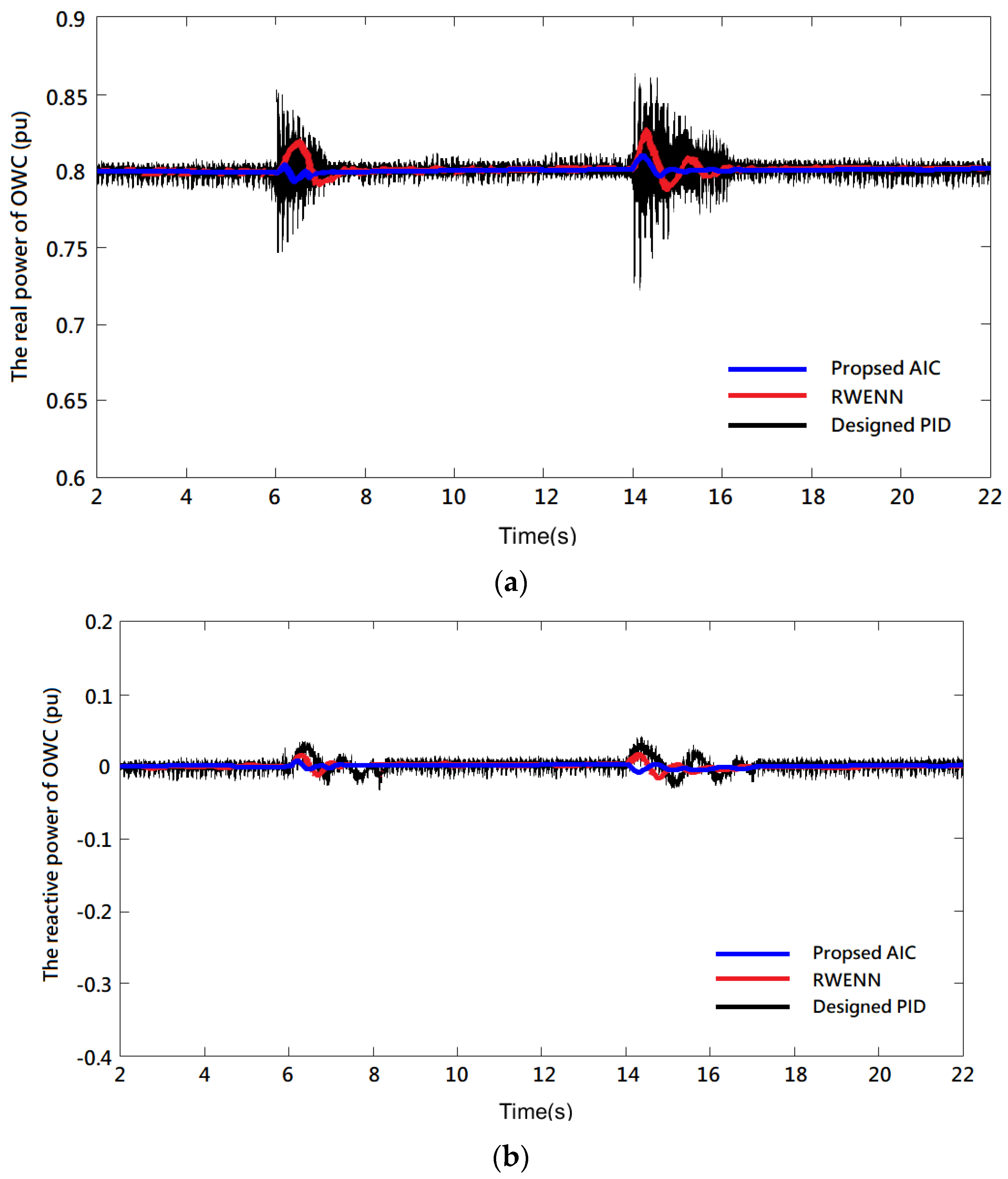
4.2. Load Disturbance
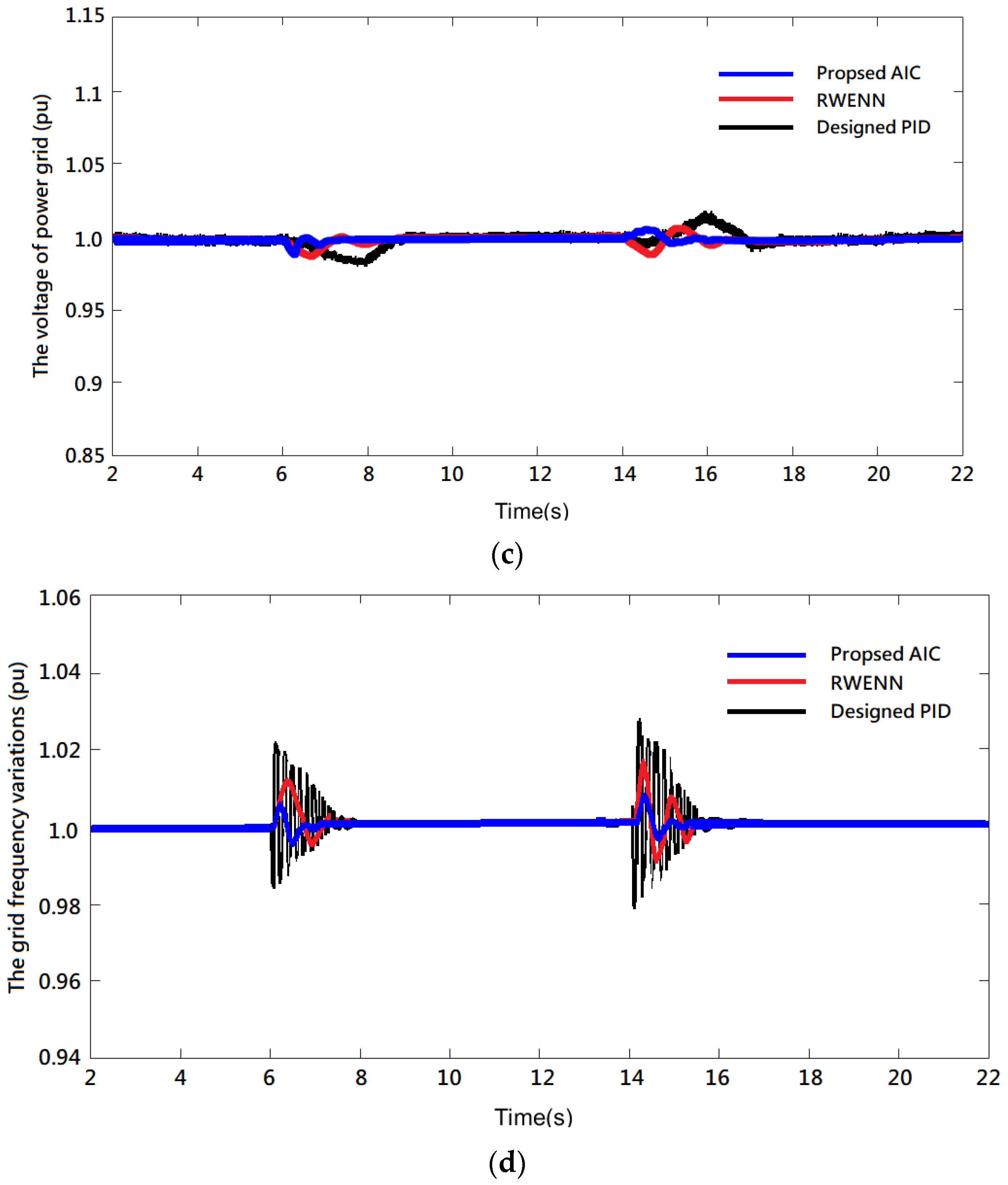
4.3. Three-Phase Short-Circuit Fault
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PMSG-Based OWC |
|---|
| Turbine: SPMSG = 4 30 MW, 4.65 A, 3000 rpm, Jeq = 1.45 × 10−3 Nms2, Bm= 6.63 × 10−3 Nm s/rad, V = 15 KV, PF = 0.98, f = 60 Hz, Ld = Lq = 6.5 mH. = 6.616 × 10−3 Wb, C1 = 0.22, C2 = 115, C3 = 0.37, C4 = 4.88, C5 = 15.36, C6 = 0.0068, C7 = 0.22, C8 = 10. T1: V1 = 0.69 kV, R1 = 83 × 10−3 pu, L1 = 0.025 pu, V2 = 23 kV, R2 = 83 × 10−3 pu, L2 = 0.025 pu, VSC: Cdc = 0.7 pu, Rs = 124.459 mΩ, Cs = ∞, Ron = 0.1 mΩ, Vf = 2 V, Vfd = 1 V, Thyristor valves firing average time Td = 4 × 10−3, Kp_Grid-side = 1, Ki_Grid-side = 100, Kp_Rotor-side = 0.3, Ki_Rotor-side = 8, Droop Xs = 0.02 pu. LCL filter: L1 = 650 μF, L2 = 28.5 μF, C = 20 μF. Instantaneous AC over current = 10 pu. Maximum AC Current: I1max = 1.1 pu, Delay time = 5 s. |
References
- Ou, T.C.; Lu, K.H.; Huang, C.J. Improvement of transient stability in a hybrid power multi-system using a designed NIDC. Energies 2017, 10, 488. [Google Scholar] [CrossRef] [Green Version]
- Lu, K.H.; Chen, H.C.; Su, Y.; Xu, Q. Design of an Intelligent Damping Controller of STATCOM with HVDC for Large Offshore Wind Farm. J. Mar. Sci. Technol. 2018, 26, 228–239. [Google Scholar]
- Lu, K.-H.; Hong, C.-M.; Han, Z.; Yu, L. New Intelligent Control Strategy Hybrid Grey-RCMAC Algorithm for Ocean Wave Power Generation Systems. Energies 2020, 13, 241. [Google Scholar] [CrossRef] [Green Version]
- Linda, S.; Rachel, S.; Thomas, D. What drives energy consumers: Engaging people in a sustainable energy transition. IEEE Power Energy Mag. 2018, 16, 20–28. [Google Scholar]
- Li, S.; Chen, K.; Li, Q.; Ai, Q. A Variable-Weather-Parameter MPPT Method Based on Equation Solution for Photovoltaic System with DC Bus. Energies 2022, 15, 6671. [Google Scholar] [CrossRef]
- Bacelli, G.; Nevarez, V.; Coe, R.G.; Wilson, D.G. Feedback Resonating Control for a Wave Energy Converter. IEEE Trans. Ind. Appl. 2019, 56, 1862–1868. [Google Scholar] [CrossRef]
- Lu, K.-H.; Hong, C.-M.; Tan, X.; Cheng, F.S. Novel Intelligent Control Technology for Enhanced Stability Performance of an Ocean Wave Energy Conversion System. Energies 2021, 14, 2027. [Google Scholar] [CrossRef]
- Nicolás, F.; Giordano, S.; Alessandro, A.; John, V.R. Nonlinear Energy-Maximizing Optimal Control of Wave Energy Systems: A Moment-Based Approach. IEEE Trans. Control. Syst. Technol. 2021, 29, 2533–2547. [Google Scholar]
- Gaebele, D.; Magaña, M.E.; Brekken, T.K.A.; Henriques, J.C.C.; Carrelhas, A.; Gato, M.C. Second Order Sliding Mode Control of Oscillating Water Column Wave Energy Converters for Power Improvement. IEEE Trans. Energy Convers. 2021, 12, 1151–1160. [Google Scholar] [CrossRef]
- Kaur, K.; Rana, R.; Kumar, N.; Singh, M.; Mishra, S. A colored petri net based frequency support scheme using fleet of electric vehicles in smart grid environment. IEEE Trans. Power Syst. 2016, 31, 4638–4649. [Google Scholar] [CrossRef]
- Ahmet, S.P.; Beste, B.; Kemalettin, E. Genetically Optimized Pitch Angle Controller of a Wind Turbine with Fuzzy Logic Design Approach. Energies 2022, 15, 6705. [Google Scholar]
- Wu, X.; Jiang, S.; Lai, C.S.; Zhao, Z.; Lai, L.L. Short-Term Wind Power Prediction Based on Data Decomposition and Combined Deep Neural Network. Energies 2022, 15, 6734. [Google Scholar] [CrossRef]
- Elgammal, A.A.A. Adaptive fuzzy sliding mode controller for grid interface ocean wave energy conversion. J. Intell. Learn. Syst. Appl. 2014, 6, 53–69. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.M.; Hong, C.M.; Huang, C.H.; Ou, T.-C. Hybrid control of a wind induction generator based on grey-elman neural network. IEEE Trans. Control. Syst. Technol. 2013, 21, 2367–2373. [Google Scholar] [CrossRef]
- Elman, J.L. Finding structure in time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Lin, F.J.; Teng, L.T.; Chu, H. Modified Elman neural network controller with improved particle swarm optimization for linear synchronous motor drive. IET Electr. Power Appl. 2008, 2, 201–214. [Google Scholar] [CrossRef]
- Lin, F.J.; Hung, Y.C. FPGA-based Elman neural network control system for linear ultrasonic motor. IEEE Trans. Ultrason. Ferroelect. Freq. Control 2009, 56, 101–113. [Google Scholar]
- Li, X.; Chen, G.; Chen, Z.; Yuan, Z. Chaotifying linear Elman networks. IEEE Trans. Neural Netw. 2002, 13, 1193–1199. [Google Scholar]
- Pham, D.T.; Liu, X. Training of Elman networks and dynamic system modelling. Int. J. Syst. Sci. 1996, 27, 221–226. [Google Scholar] [CrossRef]
- Mbede, J.B.; Huang, X.; Wang, M. Robust neuro-fuzzy sensorbased motion control among dynamic obstacles for robot manipulators. IEEE Trans. Fuzzy Syst. 2003, 11, 249–261. [Google Scholar] [CrossRef]
- Liu, H.; Wang, S.; Ouyang, P. Fault diagnosis based on improved Elman neural network for a hydraulic servo system. In Proceedings of the 2006 IEEE Conference on Robotics, Automation and Mechatronics, Bangkok, Thailand, 1–3 June 2006; pp. 1–6. [Google Scholar]
- Lu, K.H.; Hong, C.M.; Xu, Q. Recurrent wavelet-based Elman neural network with modified gravitational search algorithm control for integrated offshore wind and wave power generation systems. Energy 2019, 170, 40–52. [Google Scholar] [CrossRef]
- Wang, L.; Chen, Z.J. Stability Analysis of a Wave-Energy Conversion System Containing a Grid-Connected Induction Generator Driven by a Wells Turbine. IEEE Trans. Energy Convers. 2010, 25, 555–563. [Google Scholar] [CrossRef]
- Wang, L.; Truong, D.N. Dynamic Stability Improvement of Four Parallel-Operated PMSG-Based Offshore Wind Turbine Generators Fed to a Power System Using a STATCOM. IEEE Trans. Power Del. 2013, 28, 111–119. [Google Scholar] [CrossRef]
- Lin, F.J.; Liao, Y.H.; Lin, J.R.; Lin, W.T. Interior Permanent Magnet Synchronous Motor Drive System with Machine Learning-Based Maximum Torque per Ampere and Flux-Weakening Control. Energies 2021, 14, 346. [Google Scholar] [CrossRef]
- Swakshar, R.; Ganesh, K.V. Online learning control using adaptive critic designs with sparse kernel machines. IEEE Trans. Neural Netw. Learn. 2013, 24, 762–775. [Google Scholar]
- Zhang, Y.; Sun, H.; Guo, Y. Wind Power Prediction Based on PSO-SVR and Grey Combination Model. IEEE Access 2019, 7, 136254–136267. [Google Scholar] [CrossRef]
- Deng, J.L. Introduction to grey system theory. J. Grey Syst. 1989, 1, 1–24. [Google Scholar]
- Lin, Y.L.; Hsieh, J.G.; Jeng, J.H.; Cheng, W.C. On least trimmed squares neural networks. Neurocomputing 2015, 161, 107–112. [Google Scholar] [CrossRef]
- Wang, L.; Li, H.W.; Wu, C.T. Stability analysis of an integrated offshore wind and seashore wave farm fed to a power grid using a unified power flow controller. IEEE Trans. Power Syst. 2013, 28, 2211–2221. [Google Scholar] [CrossRef]
- Wang, L.; Zeng, S.Y.; Feng, W.K.; Prokhorov, A.V.; Mokhlis, H.; Huat, C.K.; Tripathy, M. Damping of Subsynchronous Resonance in a Hybrid System With a Steam-Turbine Generator and an Offshore Wind Farm Using a Unified Power-Flow Controller. IEEE Trans. Ind. App. 2021, 57, 110–120. [Google Scholar] [CrossRef]






| Controller | Max. Transient Real Power over Shoot (pu) | Convergence Time (nth s) | CPU Execution Time (102 s) | Mean Square Error (10−2 pu) |
|---|---|---|---|---|
| AIC | 0.022 | 4.57 | 2.82 | 6.10 |
| RWENN | 0.031 | 5.58 | 1.91 | 10.57 |
| FLWRBFN | 0.061 | 5.13 | 2.36 | 12.56 |
| RCMAC | 0.058 | 6.02 | 1.86 | 11.81 |
| Designed PID | 0.196 | 8.12 | 0.62 | 15.77 |
| Traditional PI | 0.318 | 9.26 | 0.23 | 20.62 |
| Controller | Max. Transient Power Grid Voltage over Shoot (pu) | Convergence Time (nth s) | CPU Execution Time (102 s) | Mean Square Error (10−2 pu) |
|---|---|---|---|---|
| AIC | 0.114 | 4.55 | 1.82 | 7.50 |
| RWENN | 0.116 | 6.15 | 2.01 | 10.59 |
| FLWRBFN | 0.157 | 5.13 | 2.36 | 13.33 |
| RCMAC | 0.118 | 6.02 | 1.86 | 11.02 |
| Designed PID | 0.122 | 8.12 | 0.95 | 12.07 |
| Traditional PI | 0.206 | 9.23 | 0.73 | 16.55 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Wu, S.; Lu, K.-H. Improvement of Stability in an Oscillating Water Column Wave Energy Using an Adaptive Intelligent Controller. Energies 2023, 16, 133. https://doi.org/10.3390/en16010133
Wang Z, Wu S, Lu K-H. Improvement of Stability in an Oscillating Water Column Wave Energy Using an Adaptive Intelligent Controller. Energies. 2023; 16(1):133. https://doi.org/10.3390/en16010133
Chicago/Turabian StyleWang, Zhaozhi, Shemeng Wu, and Kai-Hung Lu. 2023. "Improvement of Stability in an Oscillating Water Column Wave Energy Using an Adaptive Intelligent Controller" Energies 16, no. 1: 133. https://doi.org/10.3390/en16010133