
A Quantum Approach to the Problem of Charging Electric Cars on a Motorway
 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
2.1. Problem Description and Parameters
- Phase I—reaching the charging point (station).
- Phase II—the process of charging the EMV’s battery.
- —distance between charging station j and the start node A.
- —number of chargers at station j.
- —l-th charger at station .
- —available power of charger .
- —entrance (ingoing) node.
- —outgoing node.
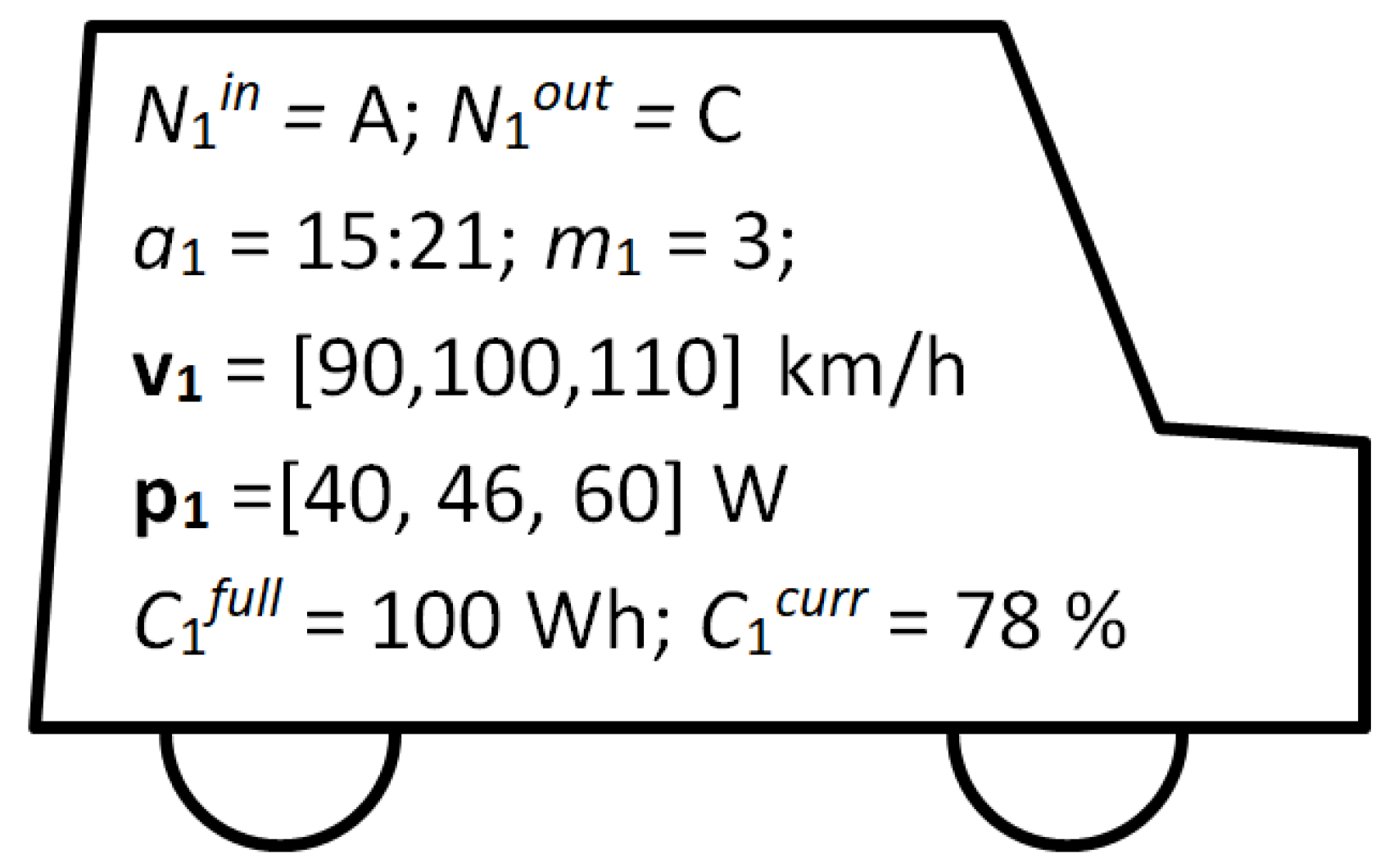
- —arrival time of EMV i, i.e., the time of entering the motorway through node .
- —total capacity of the battery of EMV i.
- —current amount of energy in the battery of EMV i.
- —number of driving modes “speed/power usage”.
- —vector of available speeds, .
- —vector of corresponding power usages, .
- Each EMV can charge its battery only once, i.e., when the battery is full after phase II, the amount of energy is sufficient for reaching the outgoing node.
- For each EMV, there exists at least one available speed for which the number of feasible charging stations is greater than 0.
- Operations in phase I can be performed fully in parallel, i.e., we do not assume any limited capacity of the motorway, accidents, traffic jams, etc.
- Each charging process is done by using exactly one charger.
- The charging time in phase II is linearly dependent on the energy deficit in the battery.
2.2. Classification of the Problem in the Classical Scheduling Theory
- Ready time of job i, calculated as the sum of arrival time of EMV i and the duration of phase I for this EMV (i.e., the time needed for reaching the charging point): .
- Execution time of job i, i.e., the duration of phase II (the length of the charging process) for the corresponding EMV.
2.3. Charging Point Models
2.3.1. Charger as a Charging Point
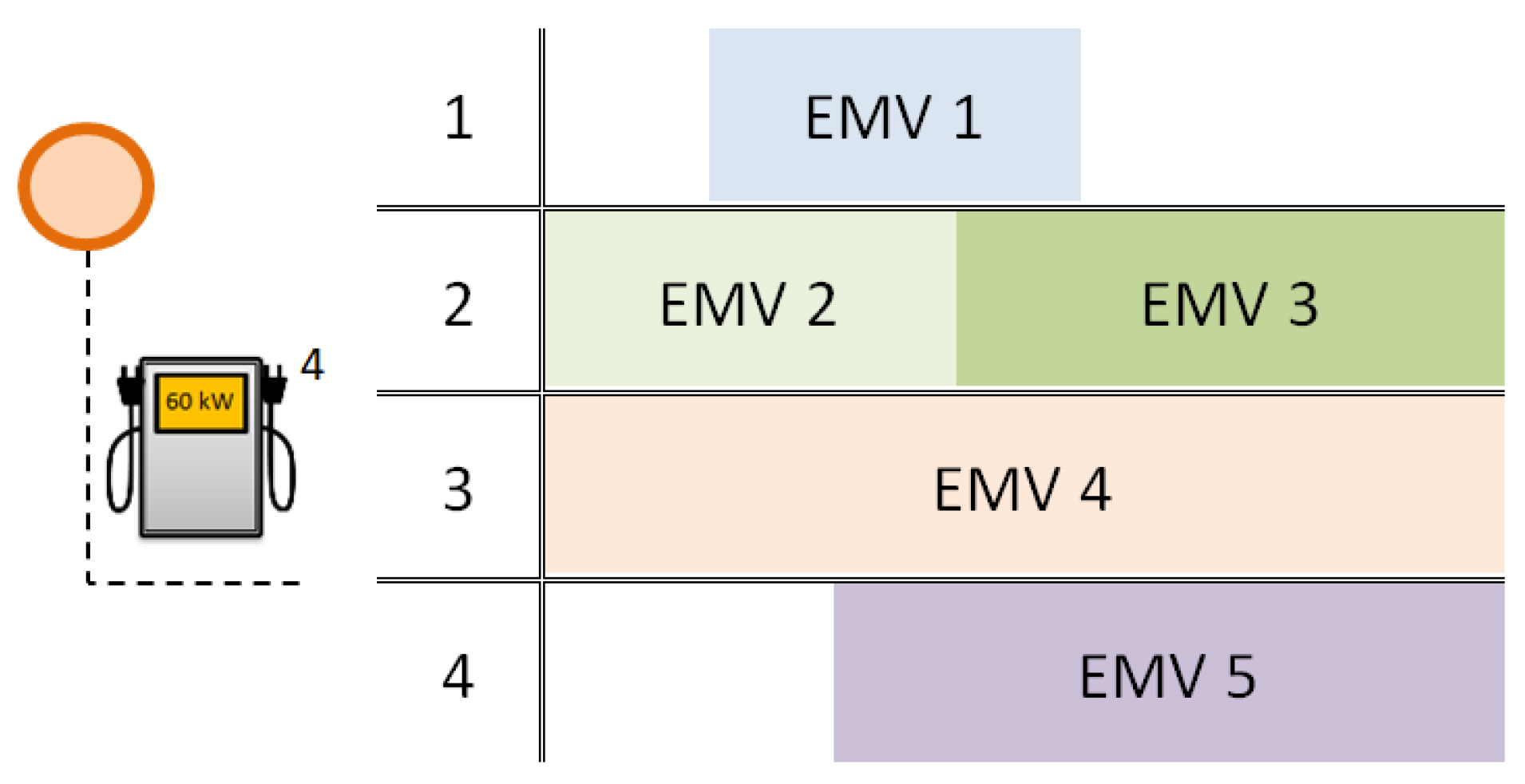
2.3.2. Station as a Charging Point
3. Quantum Approach
3.1. Conflict Avoidance Problem
3.2. Conflict Matrix
- Orange “1”—conflict because the charging point is unreachable by one of the EMVs moving in the selected driving mode;
- Black “1”—conflict because of charging at the charging point at the same time;
- Green “0”—no conflict.
3.2.1. Conflict Matrix for Charger as a Charging Point
3.2.2. Conflict Matrix for Station as a Charging Point
3.3. Gate-Based Approach and QAOA Algorithm
3.4. Gate-Based Hamiltonian Formulation
3.5. Quantum Annealing
3.6. Quantum Annealing Hamiltonian Formulation
3.7. Note on Energy
4. Computational Experiment
4.1. Assumptions
4.2. Test Instances—Generator
- ,
- , .
4.3. Exemplary Practical Instance
- nodes
- gas stations which we will interpret as charging stations.
- We will assume each charging station has 2 terminals in total.
4.4. Runtime Environment
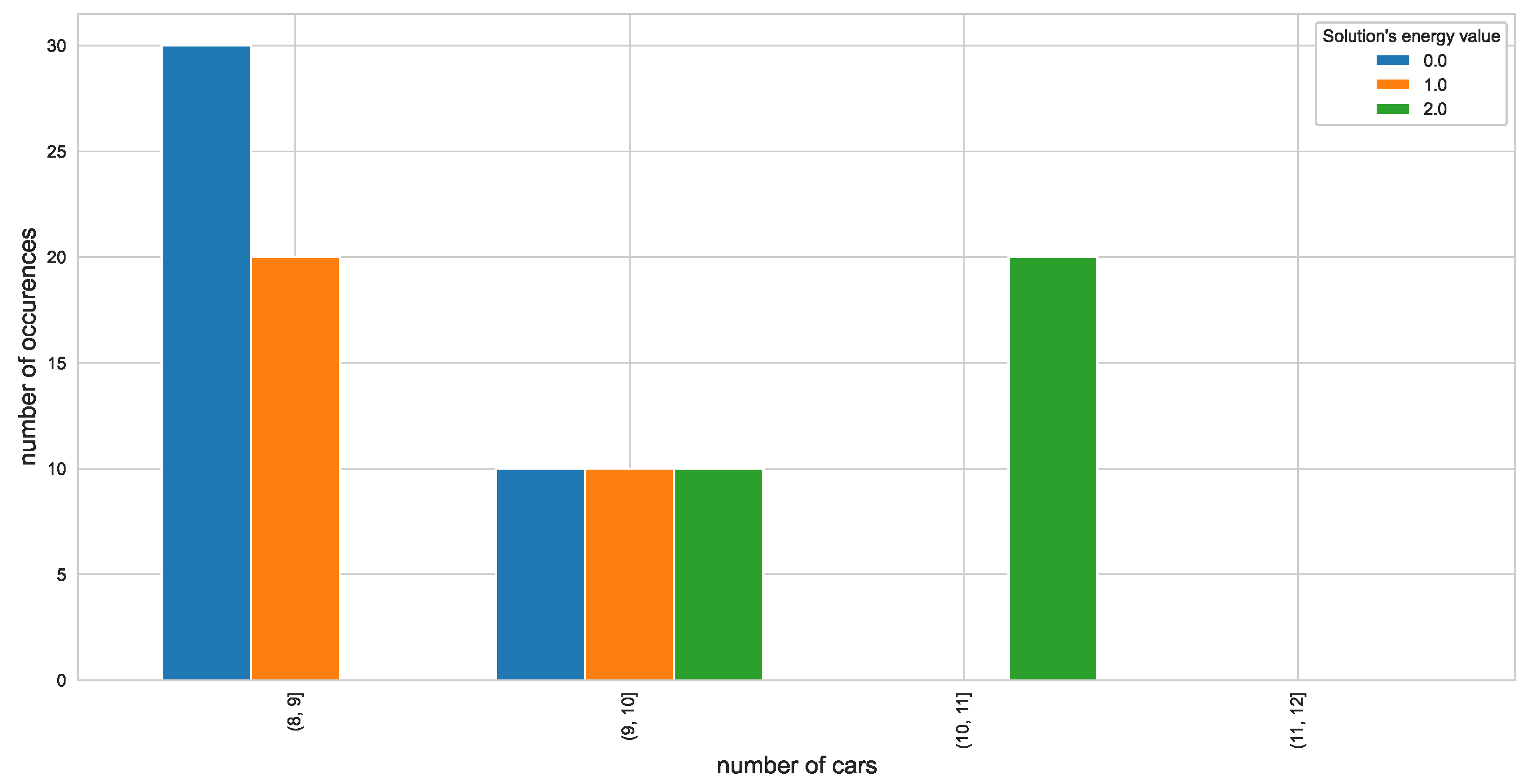
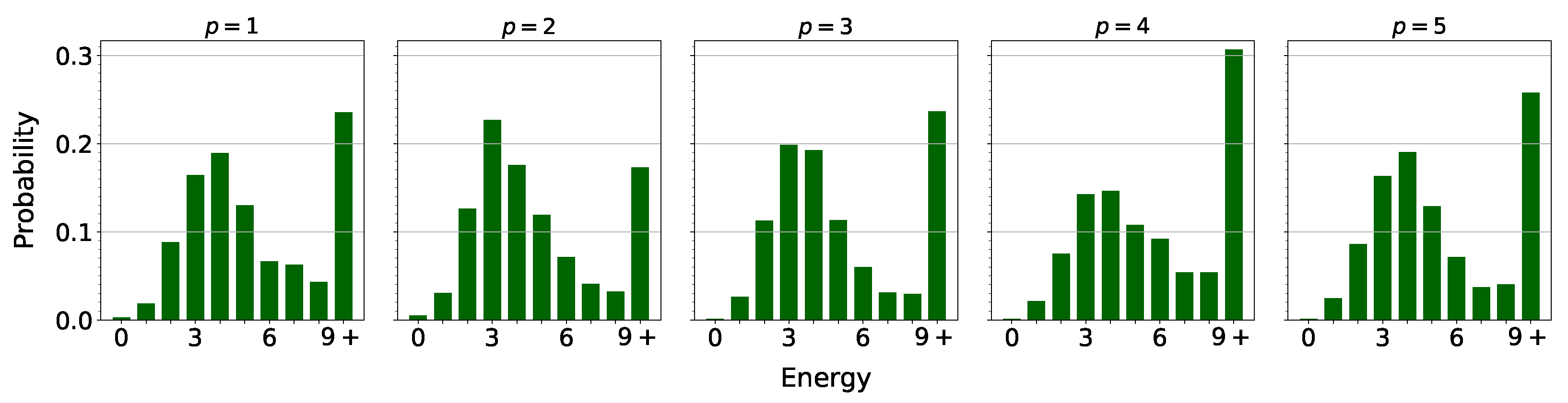
5. Results
- QPU_SAMPLING_TIME: 1.97 s
- QPU_ANNEAL_TIME_PER_SAMPLE: 20.0 µs
- QPU_READOUT_TIME_PER_SAMPLE: 156.20 µs
- QPU_ACCESS_TIME: 1.98 s
- QPU_ACCESS_OVERHEAD_TIME: 107.13 ms
- QPU_PROGRAMMING_TIME: 15.07 ms
- QPU_DELAY_TIME_PER_SAMPLE: 20.54 µs
- POST_PROCESSING_OVERHEAD_TIME: 1.12 ms
- TOTAL_POST_PROCESSING_TIME: 8.59 ms.
- : 1 h 7 m 7 s
- : 1 h 10 m 59 s
- : 1 h 19 m 3 s
- : 1 h 29 m 31 s
- : 1 h 35 m 29 s.
6. Discussion
- A set of independent chargers (probably some of them at the same station).
- A set of charging stations with several identical chargers.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| EMV | Electric Motor Vehicle |
| NISQ | Noisy Intermediate Scale Quantum |
| QPU | Quantum Processing Unit |
| QUBO | Quadratic Unconstrained Binary Optimization |
| QAOA | Quantum Approximate Optimization Algorithm |
| CM | Conflict Matrix |
| GCM | General Conflict Matrix |
| SCM | Station Conflict Matrix |
| BQM | Binary Quadratic Model |
| CQM | Constraint Quadratic Model |
References
- Wiśniewski, J.; Zagorzycka, K.; Kania, A.; Witkowski, Ł. Poland Drives E-Mobility. In Proceedings of the 17th International Conference on Project Management and Scheduling, Toulouse, France, 21–23 April 2022. [Google Scholar]
- Lemański, T.; Różycki, R.; Waligóra, G.; Węglarz, J. Scheduling of battery charging tasks with limited common power source. In Proceedings of the 17th International Conference on Project Management and Scheduling, Toulouse, France, 21–23 April 2021. [Google Scholar]
- Różycki, R.; Waligóra, G.; Węglarz, J. Scheduling battery charging jobs with linearly decreasing power demands to minimize the total time. In Bulletin of the Polish Academy of Sciences: Technical Sciences; Polska Akademia Nauk: Warsaw, Poland, 2020. [Google Scholar]
- Różycki, R.; Lemański, T.; Józefowska, J. Scheduling UAV’s on Autonomous Charging Station. Mod. Technol. Enabling Saf. Secur. Uav Oper. Urban Airsp. 2021, 59, 93. [Google Scholar]
- Kim, H.; Shin, K.G. Scheduling of battery charge, discharge, and rest. In Proceedings of the 2009 30th IEEE Real-Time Systems Symposium, Washington, DC, USA, 1–4 December 2009; pp. 13–22. [Google Scholar]
- Mitici, M.; Pereira, M.; Oliviero, F. Electric flight scheduling with battery-charging and battery-swapping opportunities. Euro J. Transp. Logist. 2022, 11, 100074. [Google Scholar] [CrossRef]
- Tan, X.; Qu, G.; Sun, B.; Li, N.; Tsang, D.H. Optimal scheduling of battery charging station serving electric vehicles based on battery swapping. IEEE Trans. Smart Grid 2017, 10, 1372–1384. [Google Scholar] [CrossRef]
- You, P.; Yang, Z.; Zhang, Y.; Low, S.; Sun, Y. Optimal charging schedule for a battery switching station serving electric buses. IEEE Trans. Power Syst. 2015, 31, 3473–3483. [Google Scholar] [CrossRef]
- Schaden, B.; Jatschka, T.; Limmer, S.; Raidl, G.R. Smart Charging of Electric Vehicles Considering SOC-Dependent Maximum Charging Powers. Energies 2021, 14, 7755. [Google Scholar] [CrossRef]
- Yang, S.N.; Cheng, W.S.; Hsu, Y.C.; Gan, C.H.; Lin, Y.B. Charge scheduling of electric vehicles in highways. Math. Comput. Model. 2013, 57, 2873–2882. [Google Scholar] [CrossRef]
- del Razo, V.; Jacobsen, H.A. Smart charging schedules for highway travel with electric vehicles. IEEE Trans. Transp. Electrif. 2016, 2, 160–173. [Google Scholar] [CrossRef]
- Ajagekar, A.; You, F. Quantum computing for energy systems optimization: Challenges and opportunities. Energy 2019, 179, 76–89. [Google Scholar] [CrossRef] [Green Version]
- Faugler, J. Big Data in der Energiewirtschaft: Warum Eon Quantencomputer Einsetzt; Handelsblatt: Düsseldorf, Germany, 2020. [Google Scholar]
- Xin, G.; Wang, P.; Jiao, Y. Noise-enhanced quantum annealing approach and its application in plug-in hybrid electric vehicle charging optimization. Electron. Lett. 2021, 57, 314–316. [Google Scholar] [CrossRef]
- Kurowski, K.; Węglarz, J.; Subocz, M.; Różycki, R.; Waligóra, G. Hybrid quantum annealing heuristic method for solving job shop scheduling problem. In Proceedings of the International Conference on Computational Science, London, UK, 21–23 June 2022; Springer: Berlin/Heidelberg, Germany, 2020; pp. 502–515. [Google Scholar]
- Ikeda, K.; Nakamura, Y.; Humble, T.S. Application of quantum annealing to nurse scheduling problem. Sci. Rep. 2019, 9, 12837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Błażewicz, J.; Ecker, K.; Pesch, E.; Schmidt, G.; Sterna, M.; Węglarz, J. Handbook on Scheduling: From Theory to Practice; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Kordmostafapour, A.; Rezaeian, J.; Mahdavi, I.; Yar Farjad, M. Scheduling unrelated parallel machine problem with multi-mode processing times and batch delivery cost. OPSEARCH 2022, 59, 1438–1470. [Google Scholar] [CrossRef]
- Nielsen, M.A.; Chuang, I. Quantum Computation and Quantum Information; American Association of Physics Teachers: College Park, MD, USA, 2002; pp. 185–198. [Google Scholar]
- Kitaev, A.Y. Quantum computations: Algorithms and error correction. Russ. Math. Surv. 1997, 52, 1191. [Google Scholar] [CrossRef]
- Chow, J.; Dial, O.; Gambetta, J. IBM Quantum breaks the 100-qubit processor barrier. Ibm Res. Blog 2021. Available online: https://research.ibm.com/blog/127-qubit-quantum-processor-eagle?lnk=ushpv18nf2 (accessed on 1 September 2022).
- Farhi, E.; Goldstone, J.; Gutmann, S. A quantum approximate optimization algorithm. arXiv 2014, arXiv:1411.4028. [Google Scholar]
- Farhi, E.; Goldstone, J.; Gutmann, S.; Sipser, M. Quantum computation by adiabatic evolution. arXiv 2000, arXiv:quant-ph/0001106. [Google Scholar]
- Hadfield, S. On the representation of Boolean and real functions as Hamiltonians for quantum computing. Acm Trans. Quantum Comput. 2021, 2, 1–21. [Google Scholar] [CrossRef]
- Wager, G.; Whale, J.; Braunl, T. Driving electric vehicles at highway speeds: The effect of higher driving speeds on energy consumption and driving range for electric vehicles in Australia. Renew. Sustain. Energy Rev. 2016, 63, 158–165. [Google Scholar] [CrossRef]
- Schmidt, M.; Zmuda-Trzebiatowski, P.; Kiciński, M.; Sawicki, P.; Lasak, K. Multiple-Criteria-Based Electric Vehicle Charging Infrastructure Design Problem. Energies 2021, 14, 3214. [Google Scholar] [CrossRef]
- Wykaz Parkingów i Mop—Generalna Dyrekcja Dróg Krajowych i Autostrad—Portal gov.pl. Available online: https://www.gov.pl/web/gddkia/wykaz-parkingow-i-mop (accessed on 1 September 2022).
- D-Wave Leap Platform. Available online: https://docs.dwavesys.com/docs/latest/c_qpu_timing.html (accessed on 1 September 2022).












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Różycki, R.; Józefowska, J.; Kurowski, K.; Lemański, T.; Pecyna, T.; Subocz, M.; Waligóra, G. A Quantum Approach to the Problem of Charging Electric Cars on a Motorway. Energies 2023, 16, 442. https://doi.org/10.3390/en16010442
Różycki R, Józefowska J, Kurowski K, Lemański T, Pecyna T, Subocz M, Waligóra G. A Quantum Approach to the Problem of Charging Electric Cars on a Motorway. Energies. 2023; 16(1):442. https://doi.org/10.3390/en16010442
Chicago/Turabian StyleRóżycki, Rafał, Joanna Józefowska, Krzysztof Kurowski, Tomasz Lemański, Tomasz Pecyna, Marek Subocz, and Grzegorz Waligóra. 2023. "A Quantum Approach to the Problem of Charging Electric Cars on a Motorway" Energies 16, no. 1: 442. https://doi.org/10.3390/en16010442