
Development of a Solar-Tracking System for Horizontal Single-Axis PV Arrays Using Spatial Projection Analysis

 ,
, 
 ,
, 
Abstract
1. Introduction
2. Modeling of Automatic Tracking for Horizontal Single-Axis PV Arrays on Sloping Terrain
2.1. Formulation of Solar Irradiance Intensity
2.2. Shadow Modelling for the Horizontal Single-Axis Tracker
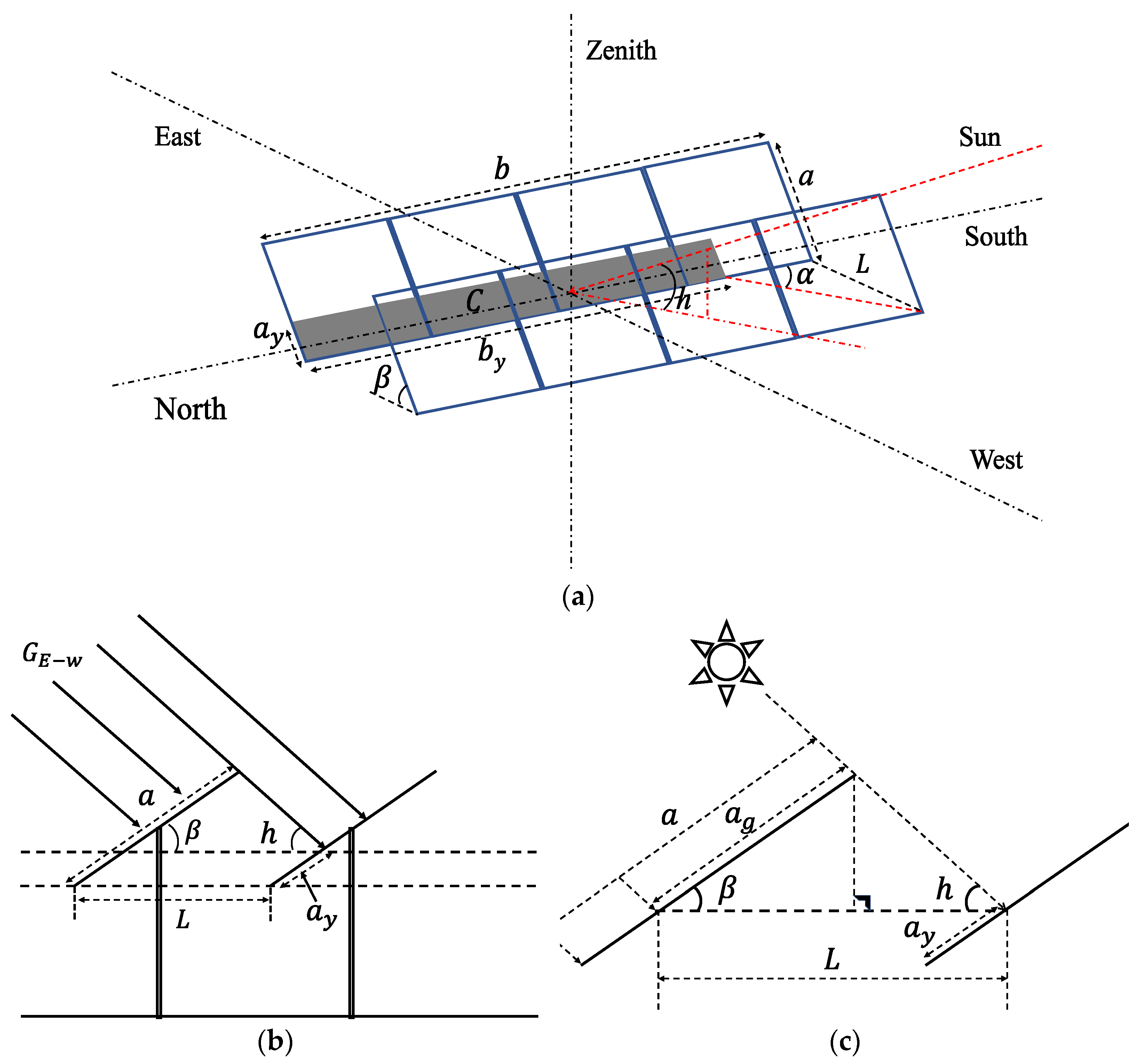
2.2.1. Shadow Model on the Horizontal Plane
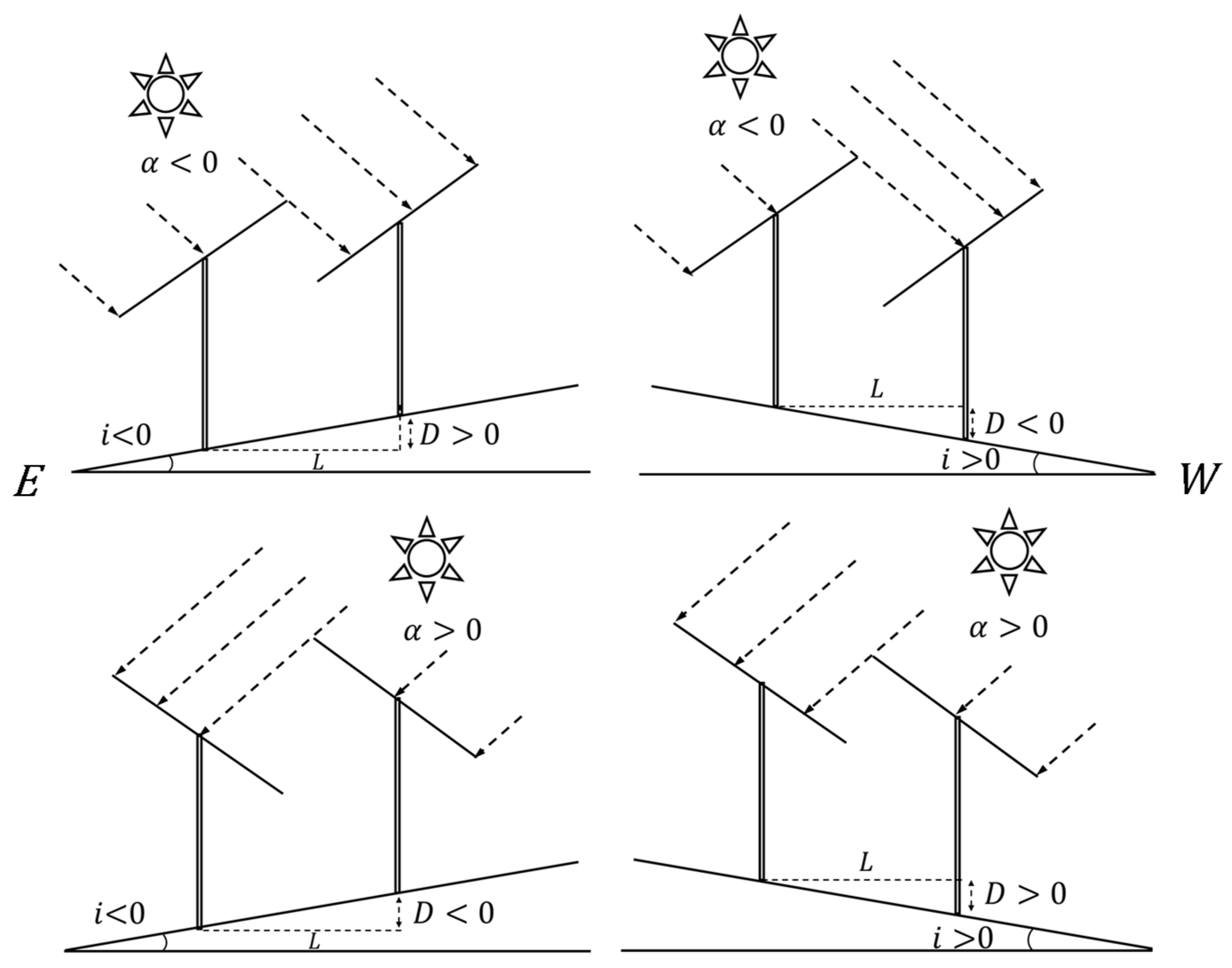
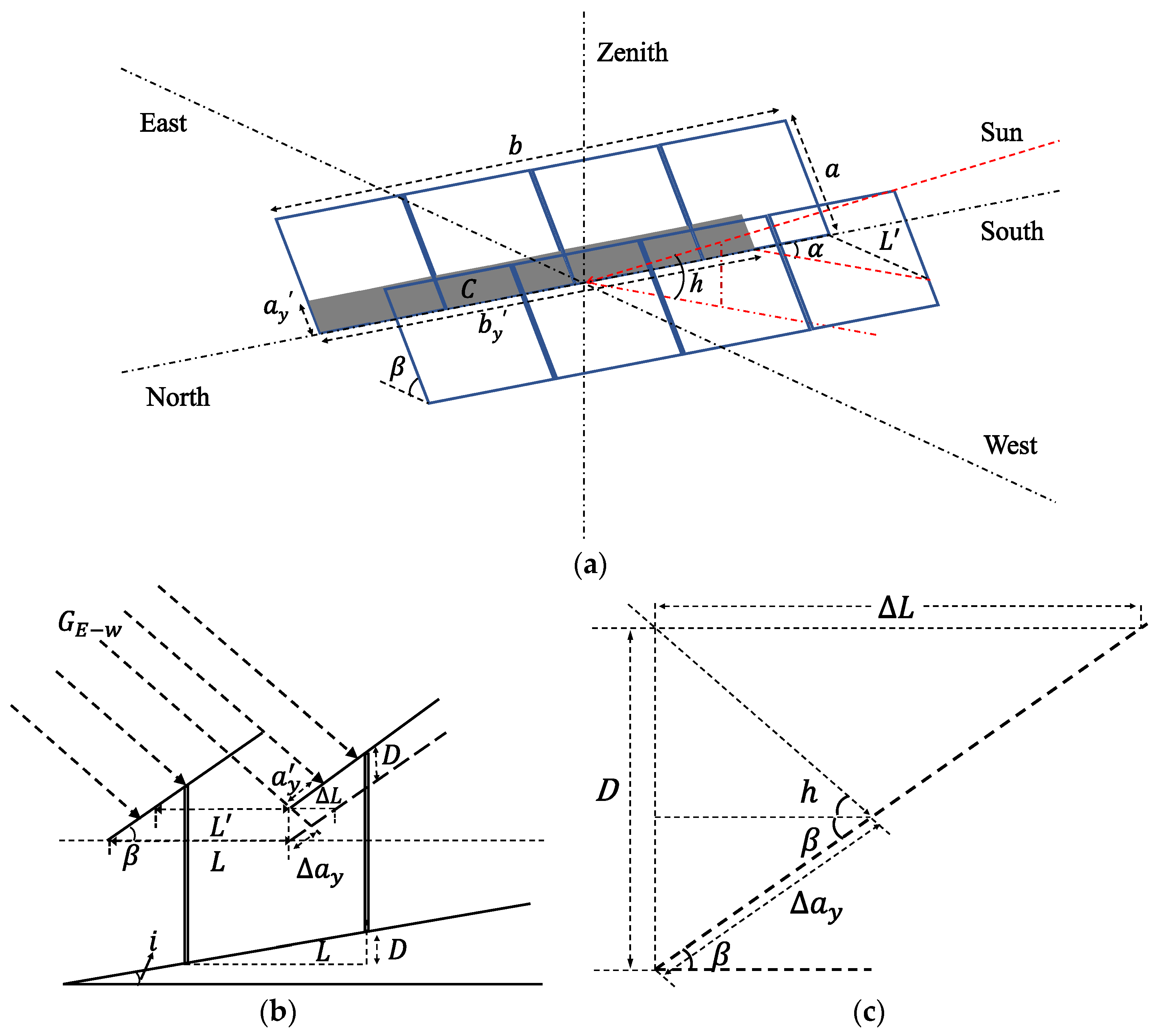
2.2.2. Shadow Model on the Sloping Terrain
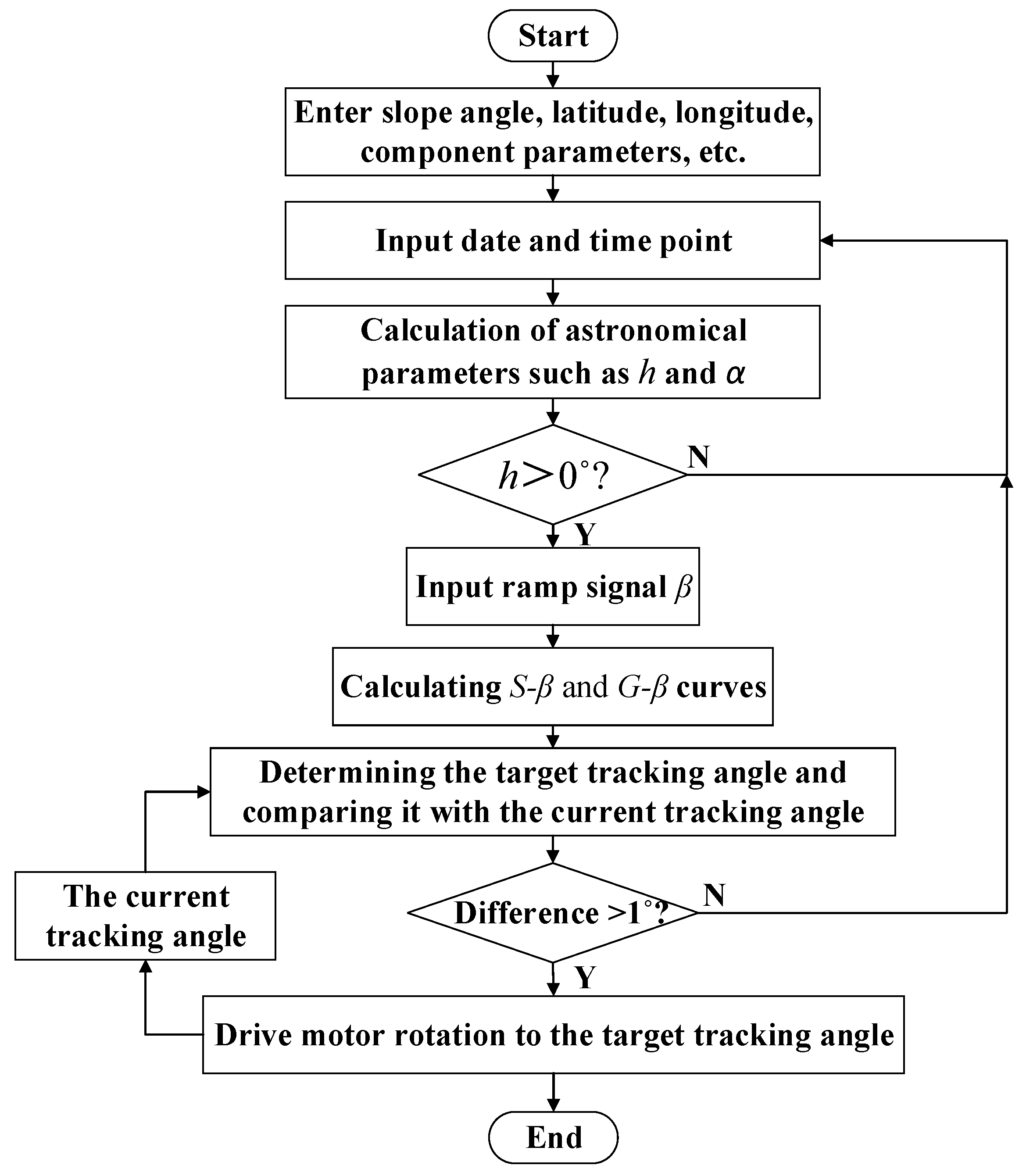
2.3. Horizontal Single-Axis Tracking Strategy for Sloping Terrain
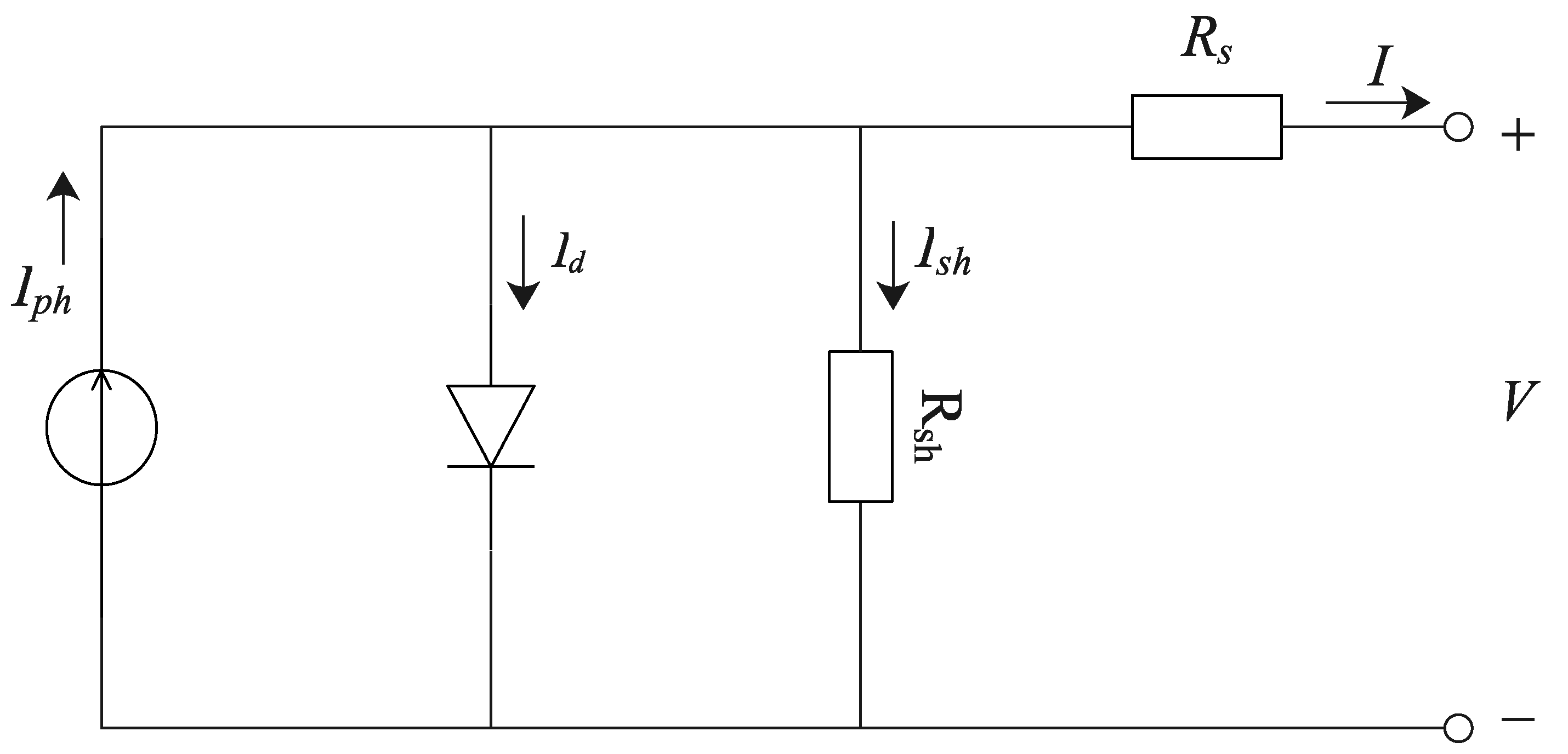
2.4. PV Power Output Model
3. Simulation of a Flat Uniaxial Tracking Strategy on Sloping Terrain
3.1. Site Characteristic Parameters
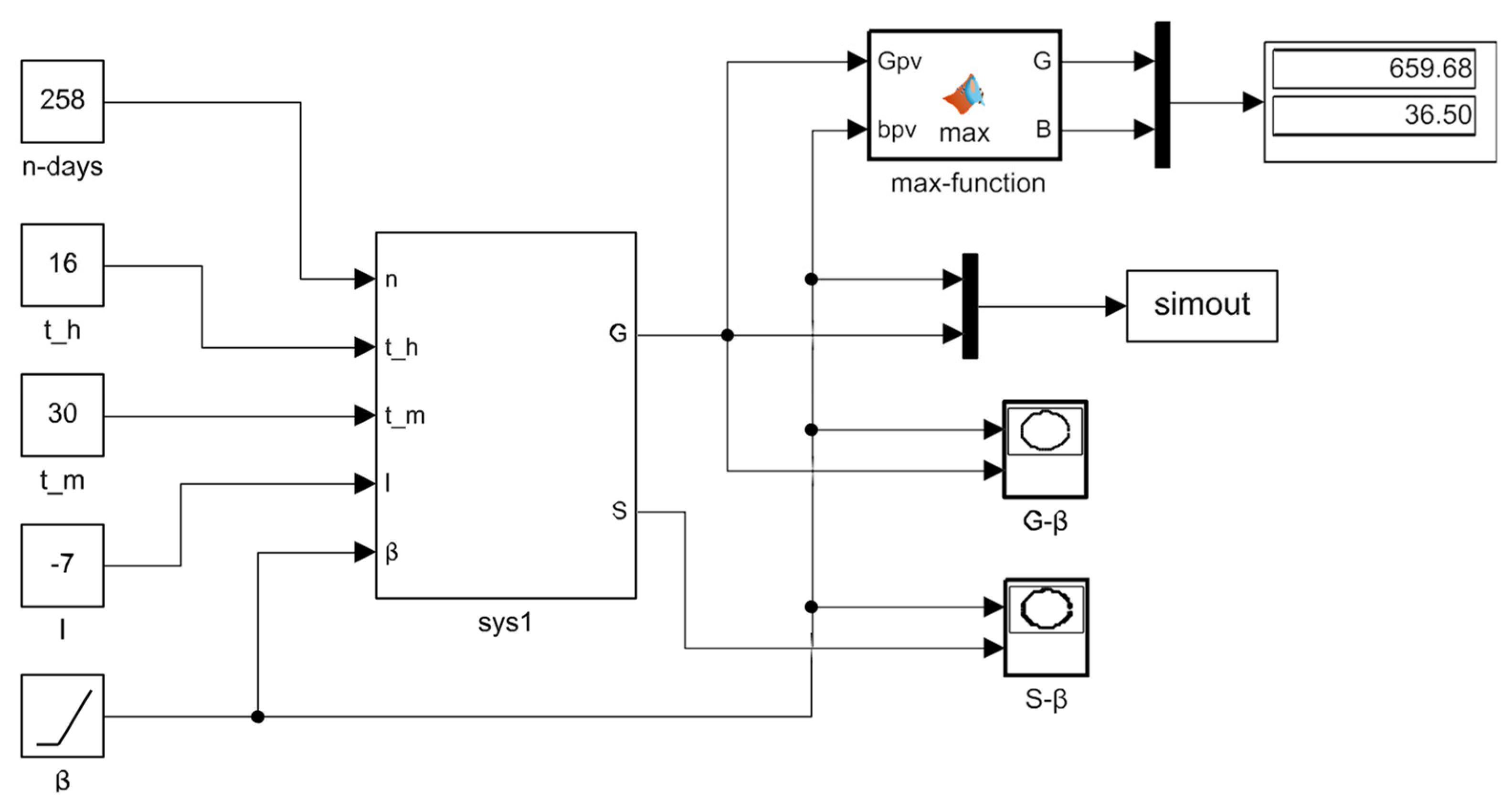
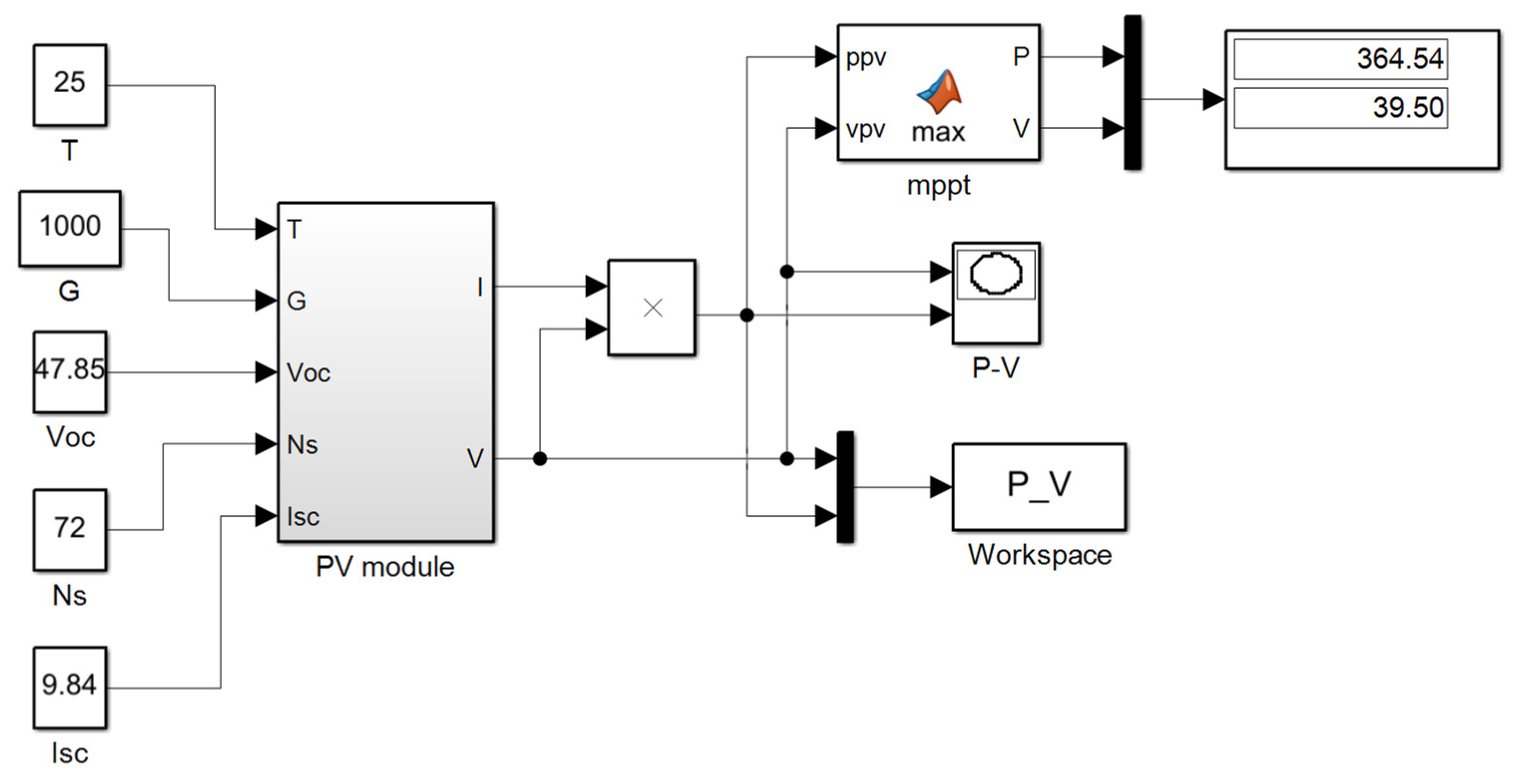
3.2. Development of Simulation Modules
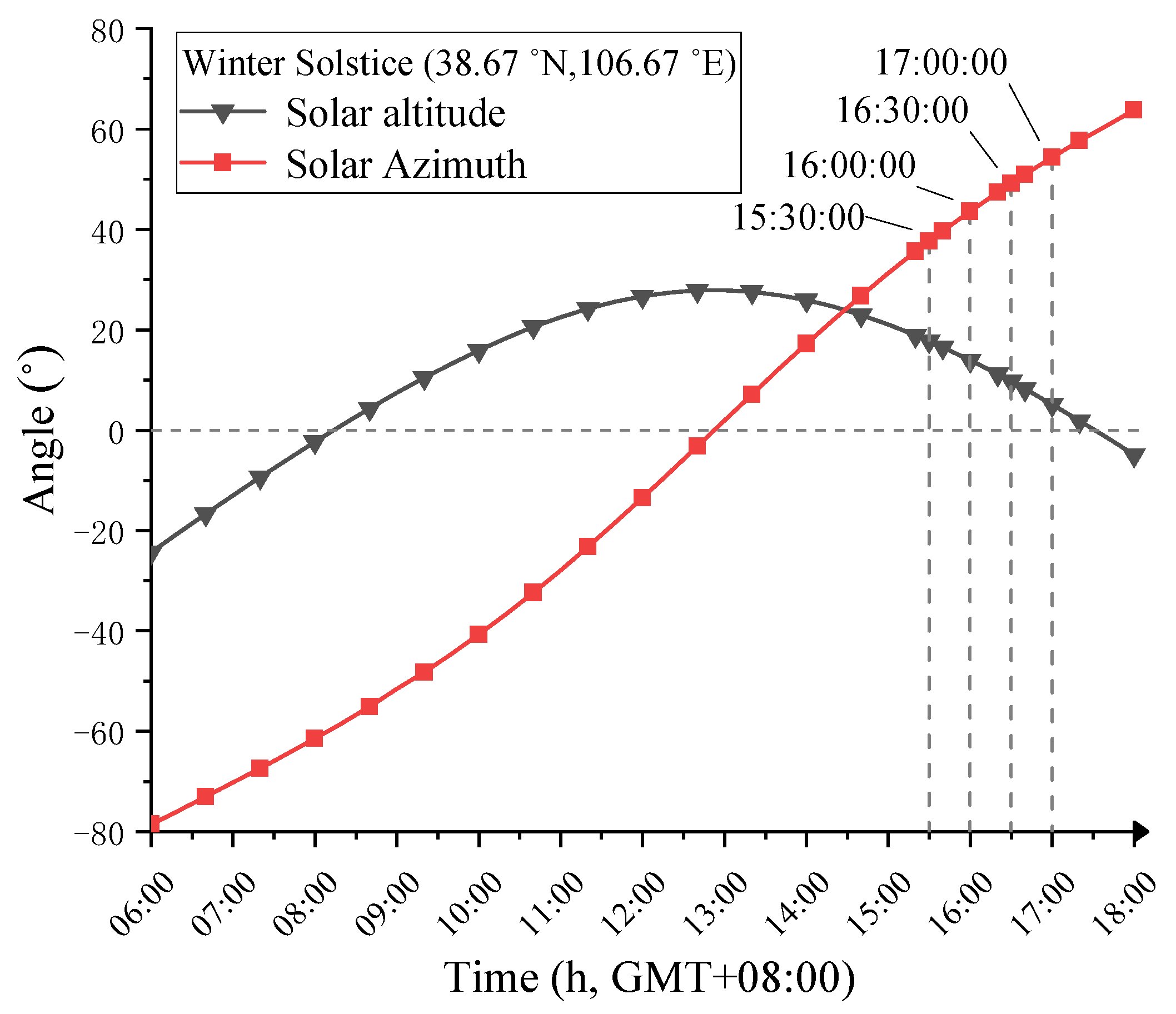
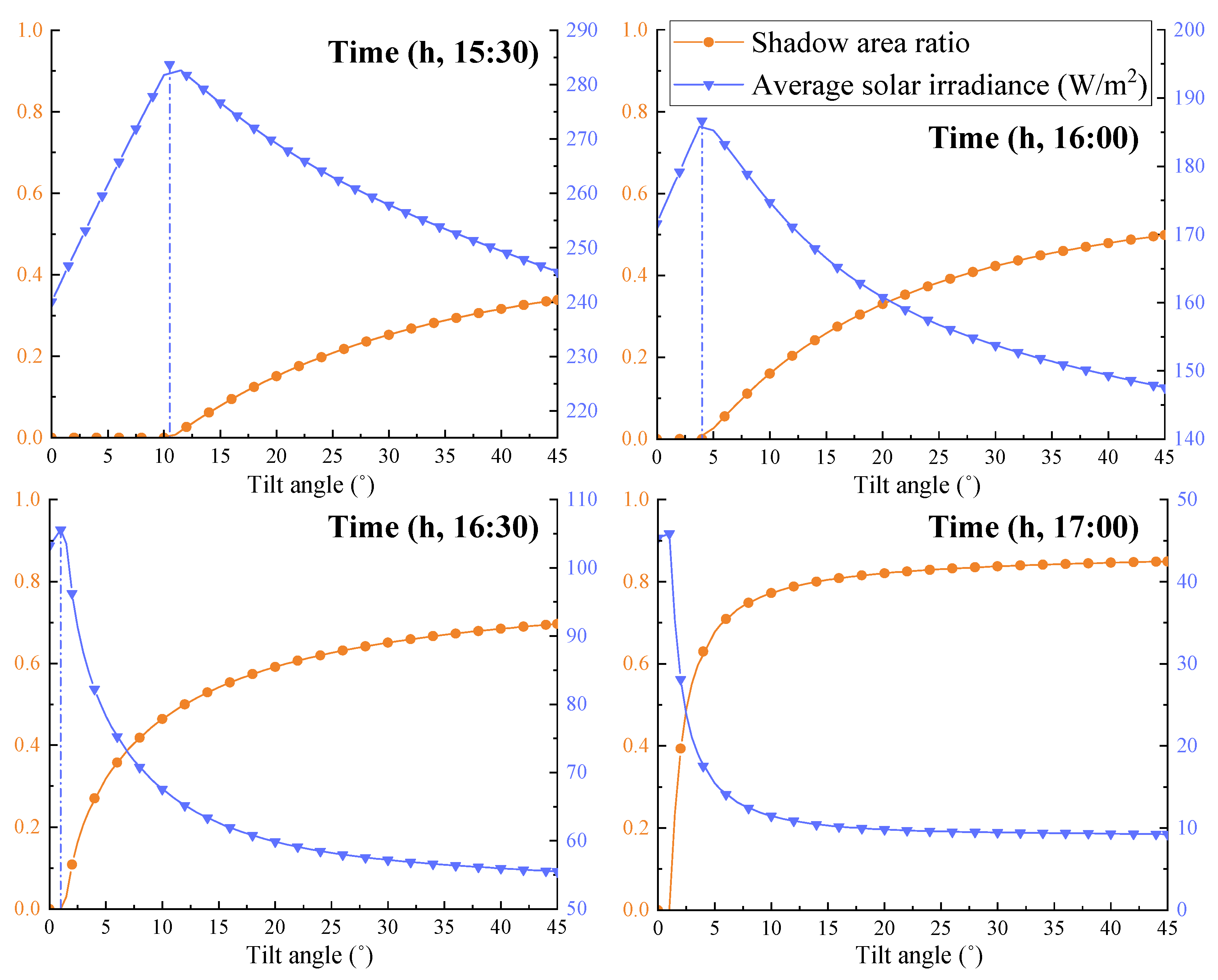
3.3. Winter Solstice Typical Moments Simulation
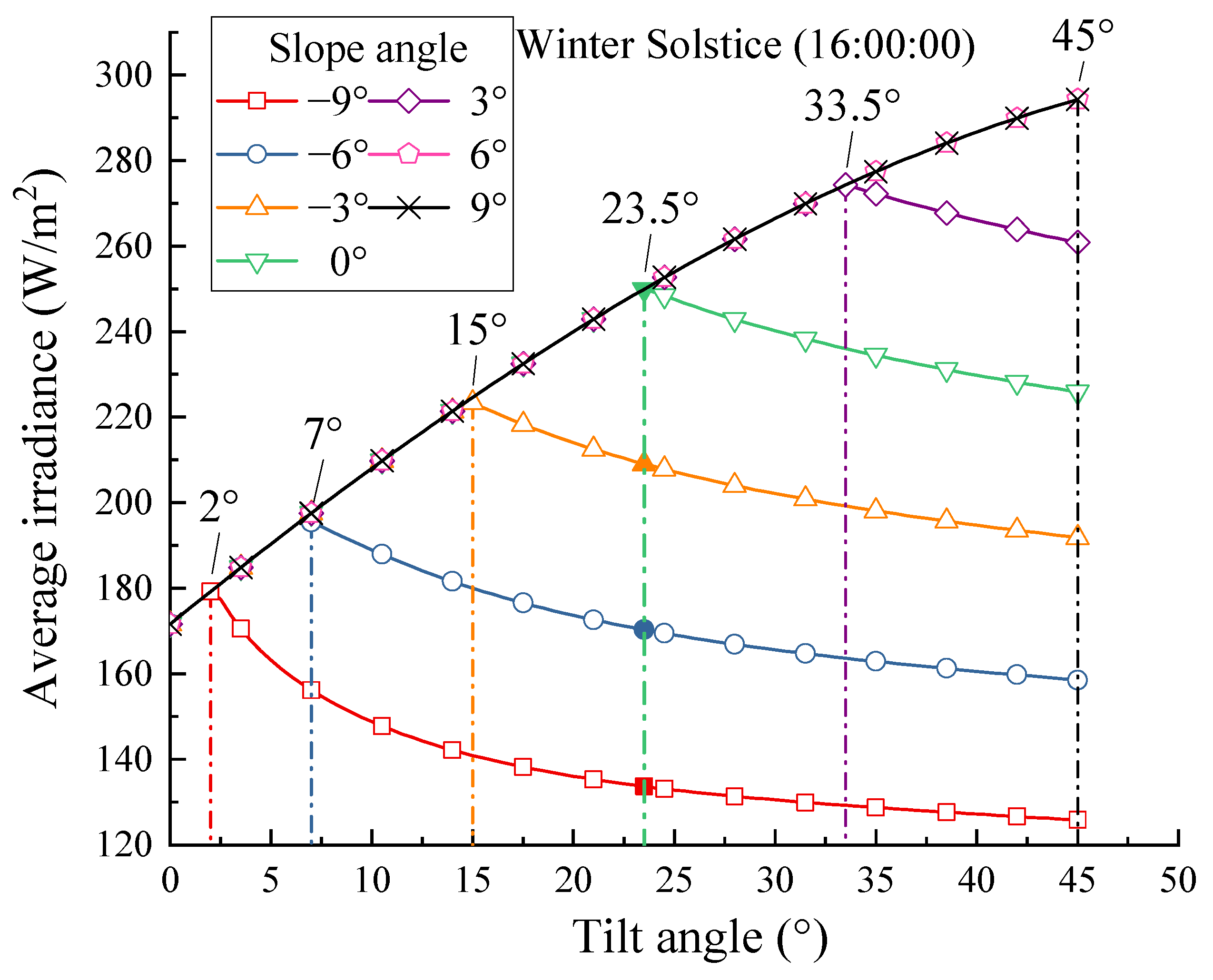
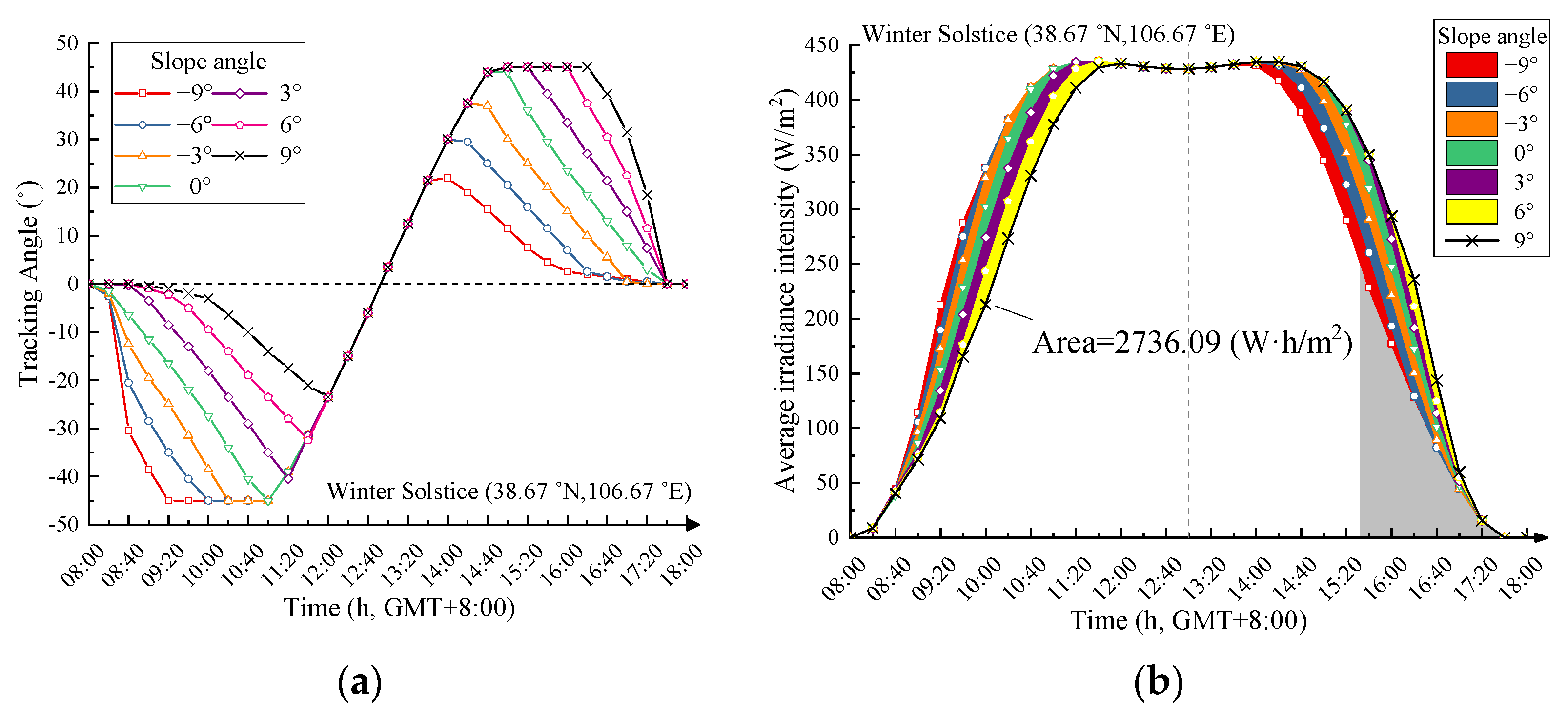
3.4. Simulation Analysis of Different Sloping Terrains on the Winter Solstice
4. Comparative Study and On-Site Validation
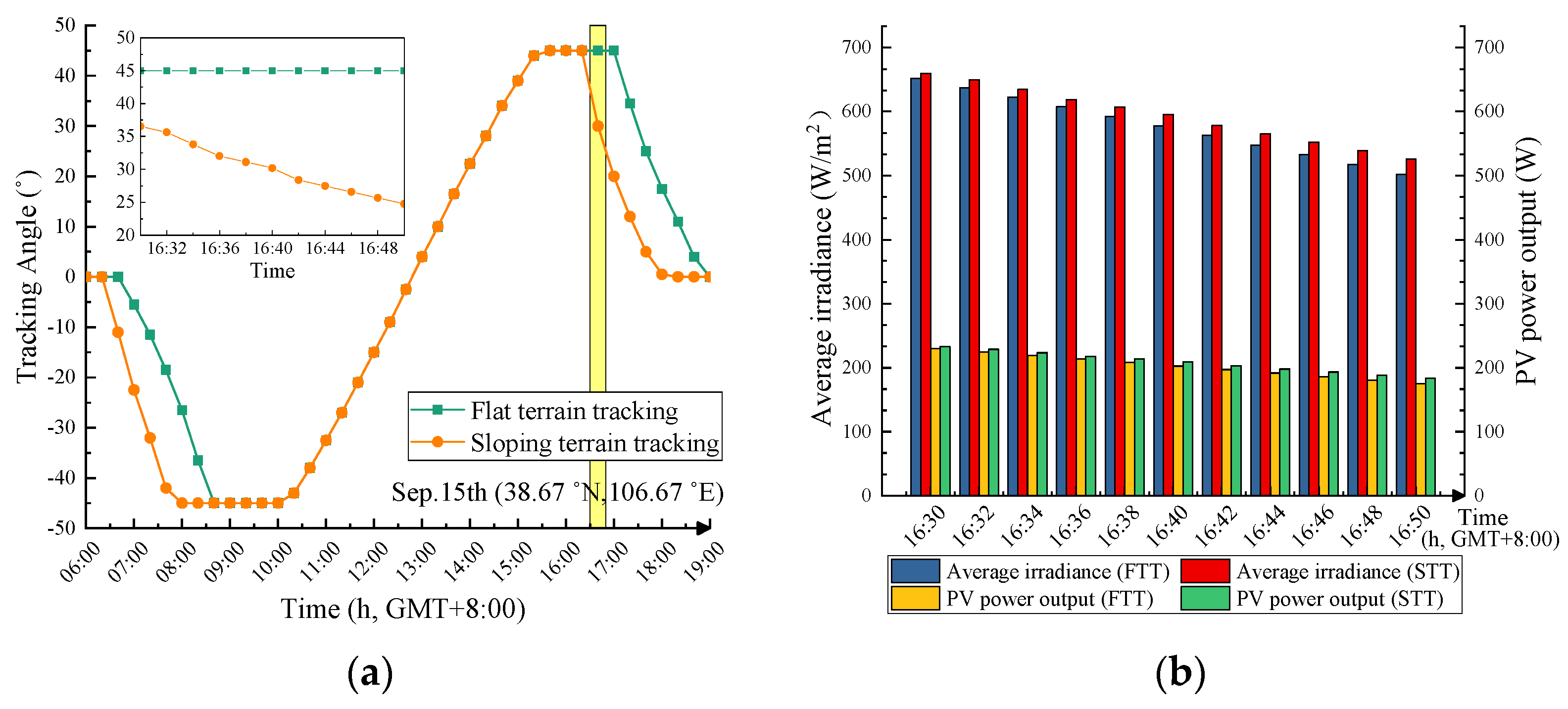
4.1. Comparison of Simulation Results
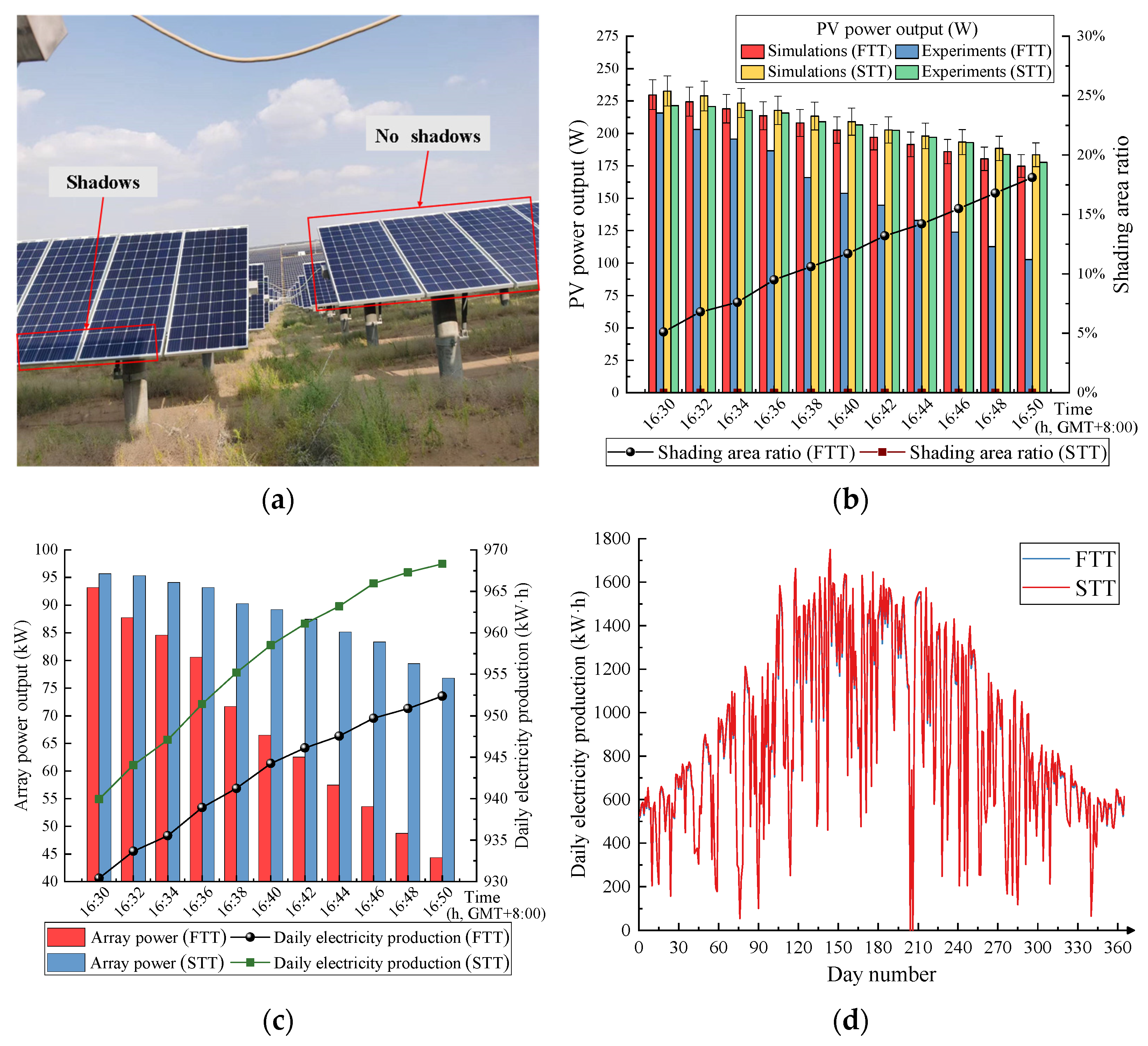
4.2. On-Site Validations
5. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


References
- Brosemer, K.; Schelly, C.; Gagnon, V. The energy crises revealed by COVID: Intersections of Indigeneity, inequity, and health. Energy Res. Soc. Sci. 2020, 68, 5. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.H.; Padmanabhan, P.; Huang, C.H. The impacts of the 1997 Asian financial crisis and the 2008 global financial crisis on renewable energy consumption and carbon dioxide emissions for developed and developing countries. Heliyon 2022, 8, 12. [Google Scholar] [CrossRef] [PubMed]
- Hill, C.A.; Such, M.C.; Chen, D.M. Battery Energy Storage for Enabling Integration of Distributed Solar Power Generation. IEEE Trans Smart Grid 2012, 3, 850–857. [Google Scholar] [CrossRef]
- Kim, J.H.; Hansora, D.; Sharma, P. Toward practical solar hydrogen production—an artificial photosynthetic leaf-to-farm challenge. Chem. Soc. Rev. 2019, 48, 1908–1971. [Google Scholar] [CrossRef]
- Hafeez, H.; Janjua, A.K.; Nisar, H. Techno-economic perspective of a floating solar PV deployment over urban lakes: A case study of NUST lake Islamabad. Sol. Energy 2022, 231, 355–364. [Google Scholar] [CrossRef]
- Perez, M.; Perez, R.; Ferguson, C.R. Deploying effectively dispatchable PV on reservoirs: Comparing floating PV to other renewable technologies. Sol. Energy 2018, 174, 837–847. [Google Scholar] [CrossRef]
- Sun, Q.Q.; Zhong, X.; Liu, J.Y. Three-dimensional modeling on lightning induced overvoltage for photovoltaic arrays installed on mountain. J. Clean. Prod. 2021, 288, 19. [Google Scholar] [CrossRef]
- Bellocchi, S.; De Iulio, R.; Guidi, G.; Manno, M.; Nastasi, B.; Noussan, M.; Prina, M.G.; Roberto, R. Analysis of smart energy system approach in local alpine regions—A case study in Northern Italy. Energy 2020, 202, 14. [Google Scholar] [CrossRef]
- Fathy, A. Reliable and efficient approach for mitigating the shading effect on photovoltaic module based on Modified Artificial Bee Colony algorithm. Renew Energy 2015, 81, 78–88. [Google Scholar] [CrossRef]
- Rahbar, K.; Eslami, S.; Pouladian-Karir, R. 3-D numerical simulation and experimental study of PV module self-cleaning based on dew formation and single axis tracking. Appl. Energy 2022, 316, 21. [Google Scholar] [CrossRef]
- Lazaroiu, G.C.; Longo, M.; Roscia, M.; Pagano, M. Comparative analysis of fixed and Sun tracking low power PV systems considering energy consumption. Energy Convers. Manag. 2015, 92, 143–148. [Google Scholar] [CrossRef]
- Nsengiyumva, W.; Chen, S.G.; Hu, L.H. Recent advancements and challenges in Solar Tracking Systems(STS):A review. Renew. Sustain. Energy Rev. 2018, 81, 250–279. [Google Scholar] [CrossRef]
- Batayneh, W.; Batainen, A.; Soliman, I. Investigation of a single-axis discrete solar tracking system for reduced actuations and maximum energy collection. Autom. Constr. 2019, 98, 102–109. [Google Scholar] [CrossRef]
- Lee, K.Y.; Chung, C.Y.; Huang, B.J. A novel algorithm for single-axis maximum power generation Sun trackers. Energy Convers. Manag. 2017, 149, 543–552. [Google Scholar] [CrossRef]
- Wang, Y.J.; Shi, Y.B.; Yu, X.Y. Intelligent Photovoltaic Systems by Combining the Improved Perturbation Method of Observation and Sun Location Tracking. PLoS ONE 2016, 11, e0156858. [Google Scholar] [CrossRef] [PubMed]
- Chowdhury, M.E.H.; Khandakar, A.; Hossain, B. A Low-Cost Closed-Loop Solar Tracking System Based on the Sun Position Algorithm. J. Sens. 2019, 2019, 3681031. [Google Scholar]
- Kuttybay, N.; Saymbetov, A.; Mekhilef, S. Optimized Single-Axis Schedule Solar Tracker in Different Weather Conditions. Energies 2020, 13, 5226. [Google Scholar] [CrossRef]
- Rodriguez-Gallegos, C.D.; Gandhi, O.; Panda, S.K. On the PV Tracker Performance: Tracking the Sun Versus Tracking the Best Orientation. IEEE J. Photovolt. 2020, 10, 1474–1480. [Google Scholar] [CrossRef]
- Gomez-Uceda, F.J.; Moreno-Garcia, I.M.; Jimenez-Martinez, J.M. Analysis of the Influence of Terrain Orientation on the Design of PV Facilities with Single-Axis Trackers. Appl. Sci. 2020, 10, 8531. [Google Scholar] [CrossRef]
- Liu, L.Q.; Han, X.Q.; Liu, C.X. The influence factors analysis of the best orientation relative to the sun for dual-axis sun tracking system. J. Vib. Control. 2015, 21, 328–334. [Google Scholar] [CrossRef]
- Housmans, C.; Ipe, A.; Bertrand, C. Tilt to horizontal global solar irradiance conversion: An evaluation at high tilt angles and different orientations. Renew. Energy 2017, 113, 1529–1538. [Google Scholar] [CrossRef]
- Jordehi, A.R. Parameter estimation of solar photovoltaic (PV) cells: A review. Renew. Sustain. Energy Rev. 2016, 61, 354–371. [Google Scholar] [CrossRef]
- Li, Z.; Ql, A.; Mc, A. A simplified mathematical model for power output predicting of Building Integrated Photovoltaic under partial shading conditions. Energy Convers. Manag. 2019, 180, 831–843. [Google Scholar]
- Zhang, F.; Wu, M.Y.; Hou, X.T. The analysis of parameter uncertainty on performance and reliability of photovoltaic cells. J. Power Sources 2021, 30, 507. [Google Scholar] [CrossRef]
- Ge, Q.; Li, Z.; Sun, Z. Low Resistance Hot-Spot Diagnosis and Suppression of Photovoltaic Module Based on I-U Characteristic Analysis. Energies 2022, 15, 3950. [Google Scholar] [CrossRef]
- Dhimish, M.; Holmes, V.; Mather, P. Novel hot spot mitigation technique to enhance photovoltaic solar panels output power performance. Sol. Energy Mater. Sol. Cells 2018, 179, 72–79. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key Parameters | Values |
|---|---|
| Latitude φ | 38.67 °N |
| Longitude e | 106.67 °E |
| Slope angle i | −9°~+9° |
| Width of PV string a | 1.984 m |
| Length of PV string b | 26.784 m |
| Number of strings in a PV array | 16 |
| Number of PV panels in a string | 27 |
| Horizontal array spacing L | 5.00 m |
| Ground reflectance ρ | 0.20 |
| Atmospheric transparency coefficient P | 0.703 |
| Key Parameters | Values |
|---|---|
| Rated power | 365 W |
| Short-circuit current | 9.84 A |
| Open-circuit voltage | 47.85 V |
| Operating temperature | −40 °C~+80 °C |
| Module dimensions | 1984 × 992 × 30 mm |
| Mass | 26 ± 0.5 kg |
| Np | 3 |
| Ns | 24 |
| Cell type | Monocrystalline silicon |
| Tracking range * | −45°~+45° |
| Sloping Angle i | Solar Irradiance (W·h/m2) | Difference (Based on I = 0°) |
|---|---|---|
| −9° | 2735.83 | −3.1% |
| −6° | 2778.20 | −1.6% |
| −3° | 2811.77 | −0.4% |
| 0° | 2824.06 | 0.0% |
| 3° | 2813.54 | −0.4% |
| 6° | 2779.82 | −1.6% |
| 9° | 2736.09 | −3.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, B.; Huang, J.; Xing, K.; Liao, L.; Xie, P.; Xiao, M.; Zhao, W. Development of a Solar-Tracking System for Horizontal Single-Axis PV Arrays Using Spatial Projection Analysis. Energies 2023, 16, 4008. https://doi.org/10.3390/en16104008
Huang B, Huang J, Xing K, Liao L, Xie P, Xiao M, Zhao W. Development of a Solar-Tracking System for Horizontal Single-Axis PV Arrays Using Spatial Projection Analysis. Energies. 2023; 16(10):4008. https://doi.org/10.3390/en16104008
Chicago/Turabian StyleHuang, Bin, Jialiang Huang, Ke Xing, Lida Liao, Peiling Xie, Meng Xiao, and Wei Zhao. 2023. "Development of a Solar-Tracking System for Horizontal Single-Axis PV Arrays Using Spatial Projection Analysis" Energies 16, no. 10: 4008. https://doi.org/10.3390/en16104008
APA StyleHuang, B., Huang, J., Xing, K., Liao, L., Xie, P., Xiao, M., & Zhao, W. (2023). Development of a Solar-Tracking System for Horizontal Single-Axis PV Arrays Using Spatial Projection Analysis. Energies, 16(10), 4008. https://doi.org/10.3390/en16104008