
Fuzzy Control Algorithm Applied on Constant Airflow Controlling of Fans


Abstract
:1. Introduction
2. Research on the Way of Constant Air Volume Control
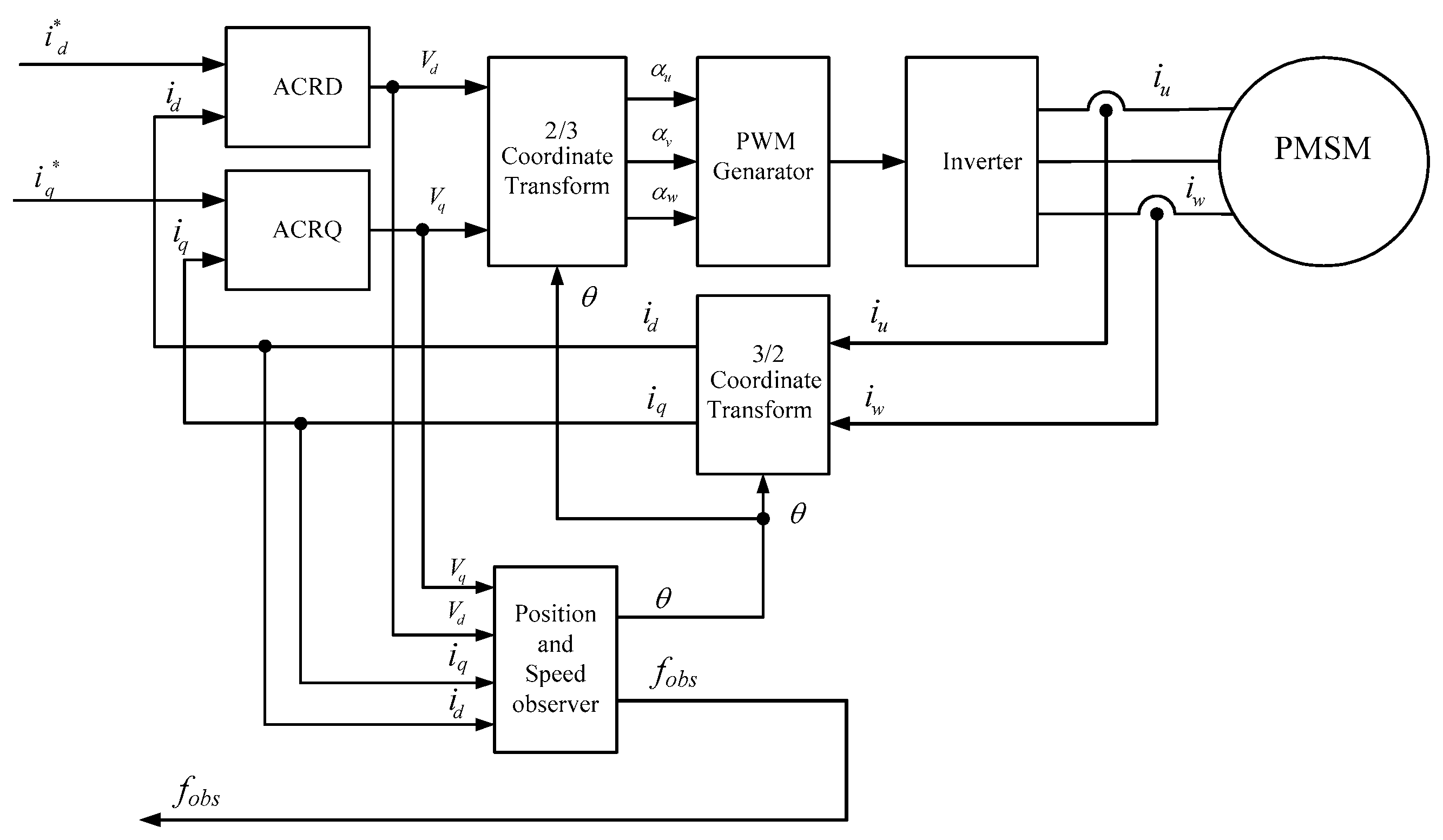
2.1. Build FOC to PMSM
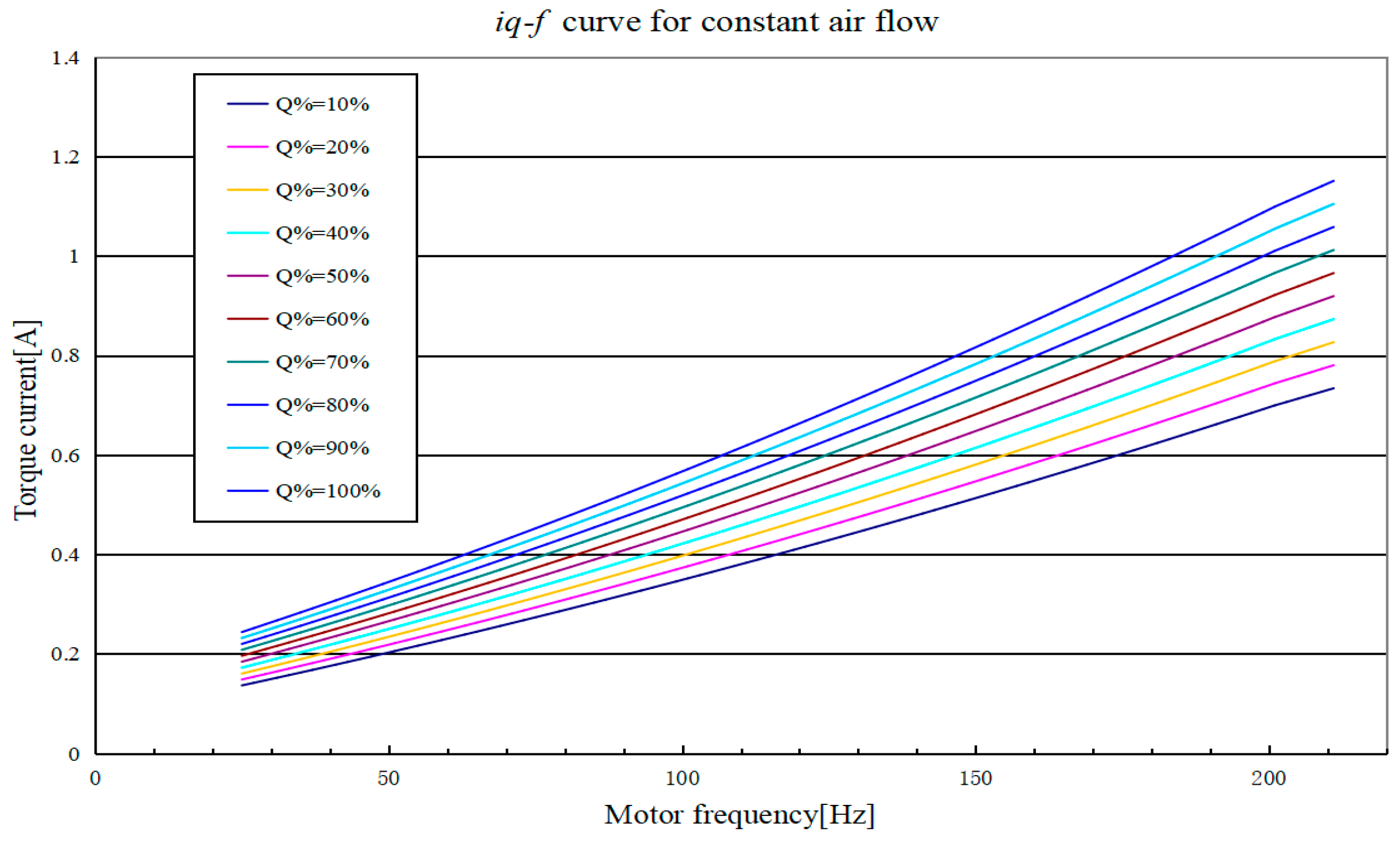
2.2. Design of the Airflow Observer
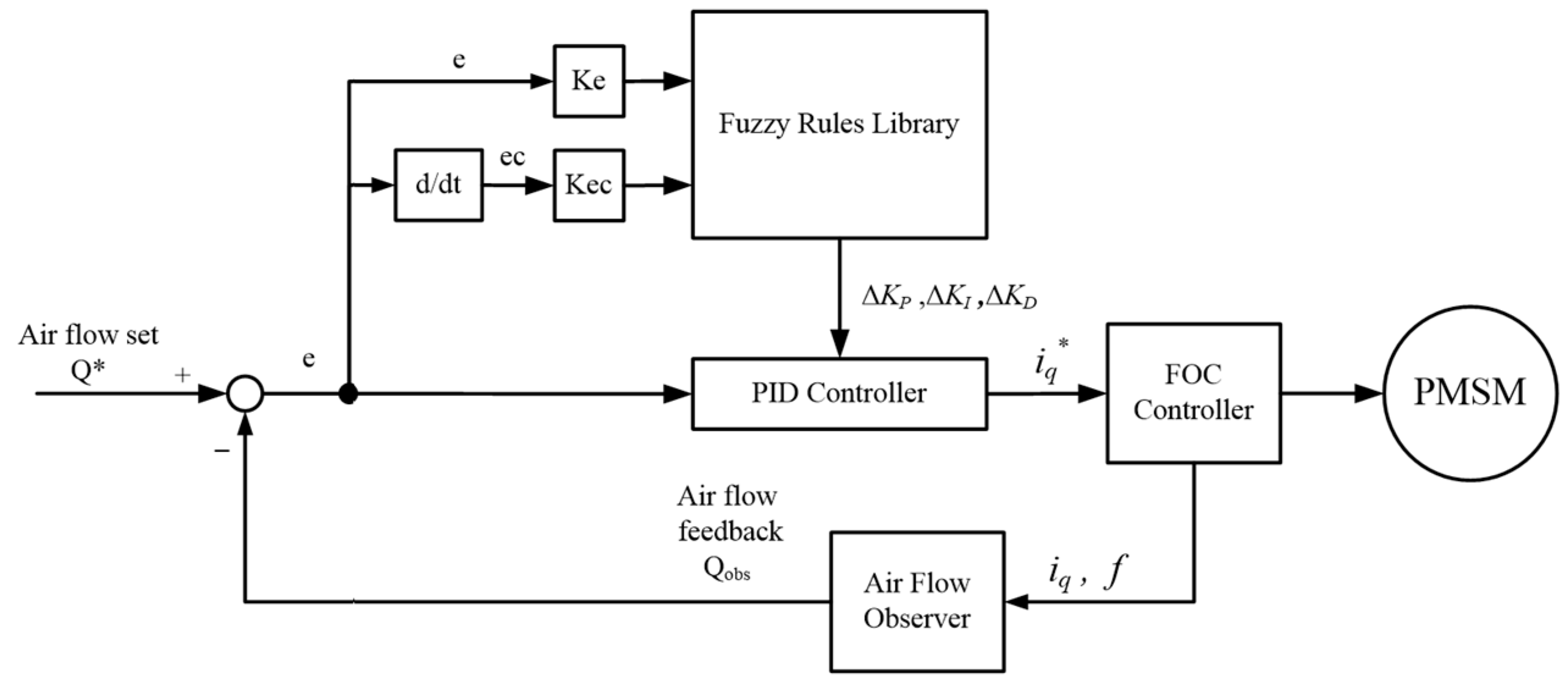
2.3. Design of Fuzzy PID Control System
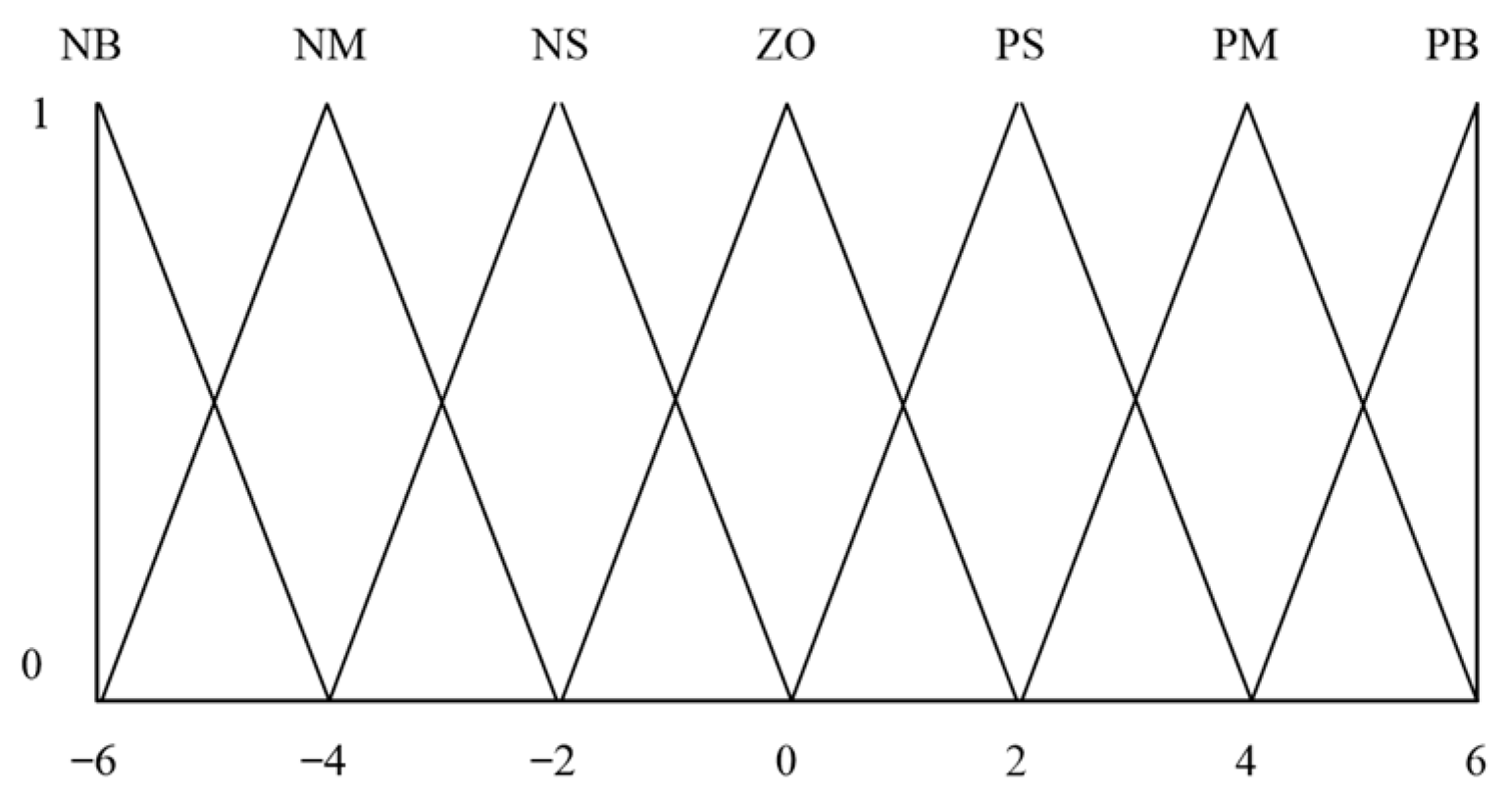
2.3.1. Discrete Type Fuzzy PID Controller Design and Its Principles
- (1)
- When the differ ‘e’ value is quite big: in order to accelerate the response speed, the value of KP needs to be set big, too., In order to avoid possible differential supersaturation, the value of KD needs to be set small; in the meantime, in order to prevent the overhead, which makes integral windup, the KI. needs to be set equal to 0, which removes the integral action;
- (2)
- When differ e and differ change ‘ec’ value is medium in order to make the control system response has a less overshoot, the value of Kp needs to be set a little smaller, K1′s value needs to be proper, at this time, the value of KD has a big affecting to the system response; the value set need to be proper, not big, not small, to guarantee the control system’s response speed;
- (3)
- When differ ‘e’ is quite small, it means the control system’s output is close to the set value: in order to make the control system have a good steady, we need to increase the value of KP, and KI, in the meantime, in order to avoid control system has a vibration near the set value, and increase the control system’s anti-interference ability, the value of KD is very important, normally, when ‘ec’ is small, the value of KD needs to be set a little bigger, when ‘ec’ is big, the value of ‘ec’ need be set a little smaller.
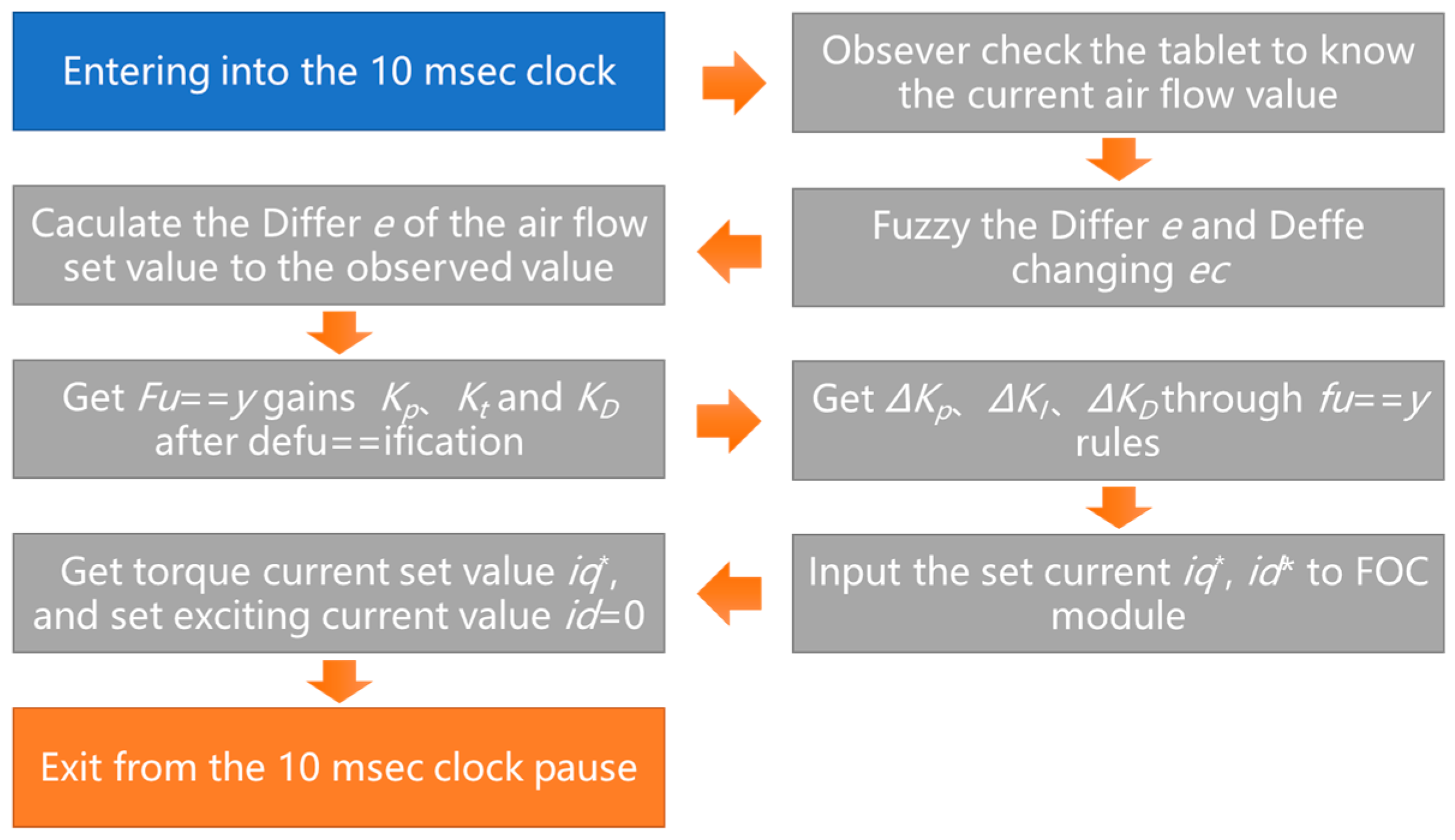
2.3.2. Fuzzy PID Control Flow Chart Design
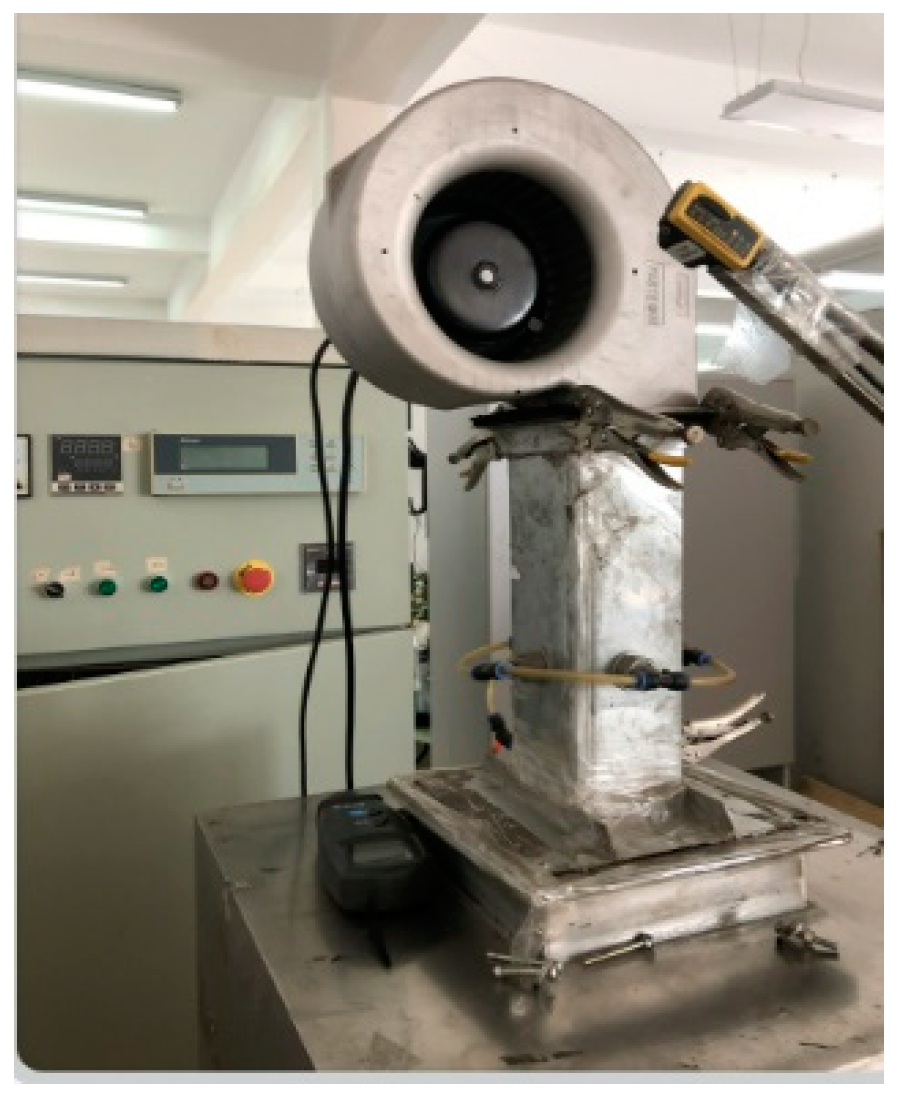
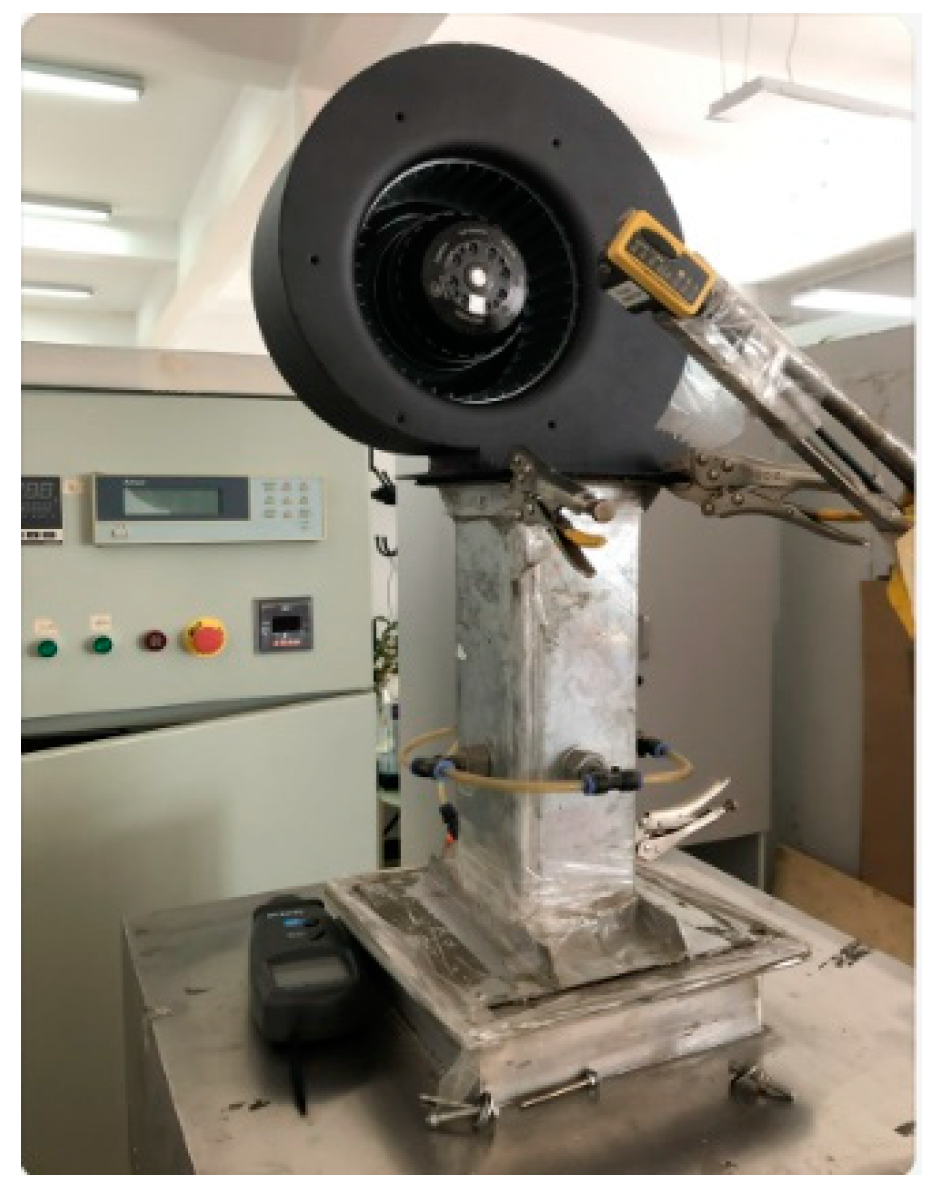
3. Experiment Samples Building
3.1. Fuzz Algorithm Controlled Fan Sample Building
3.2. Fuzzy PID and Air Observer Built
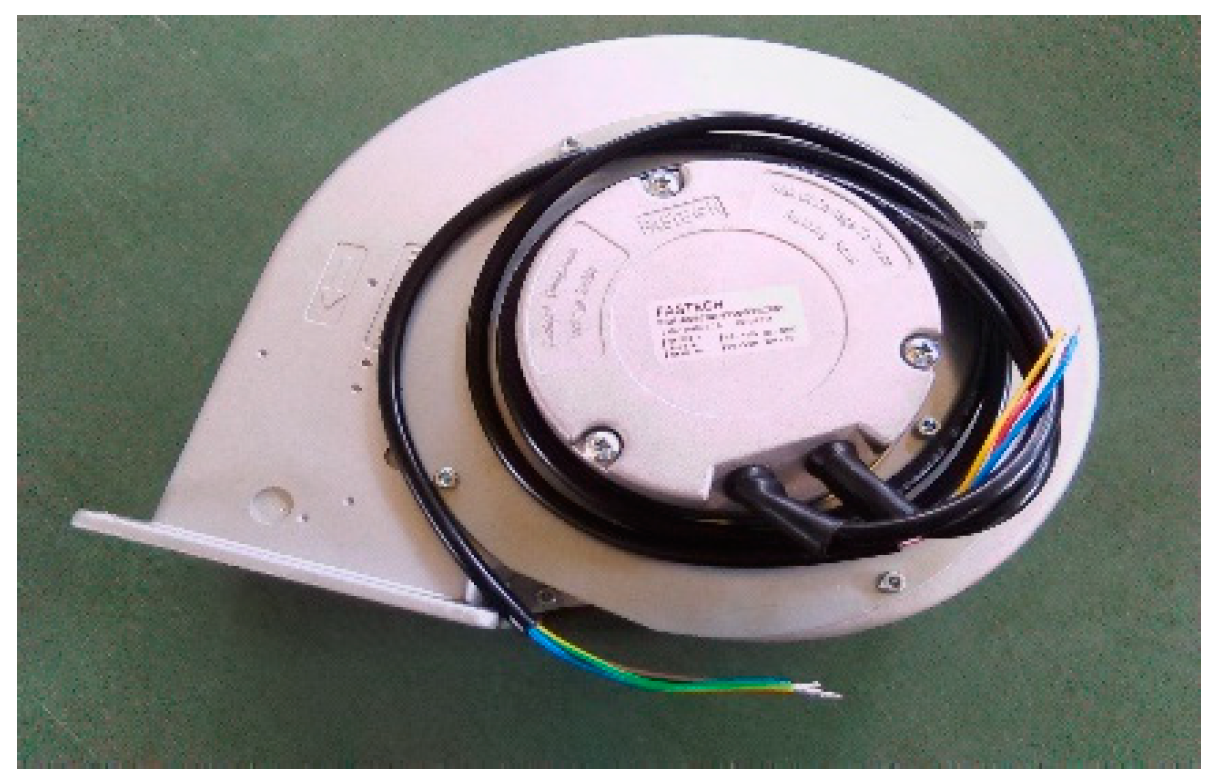
3.3. No Fuzzy Algorithm-Controlled Experiment Fan Sample Building
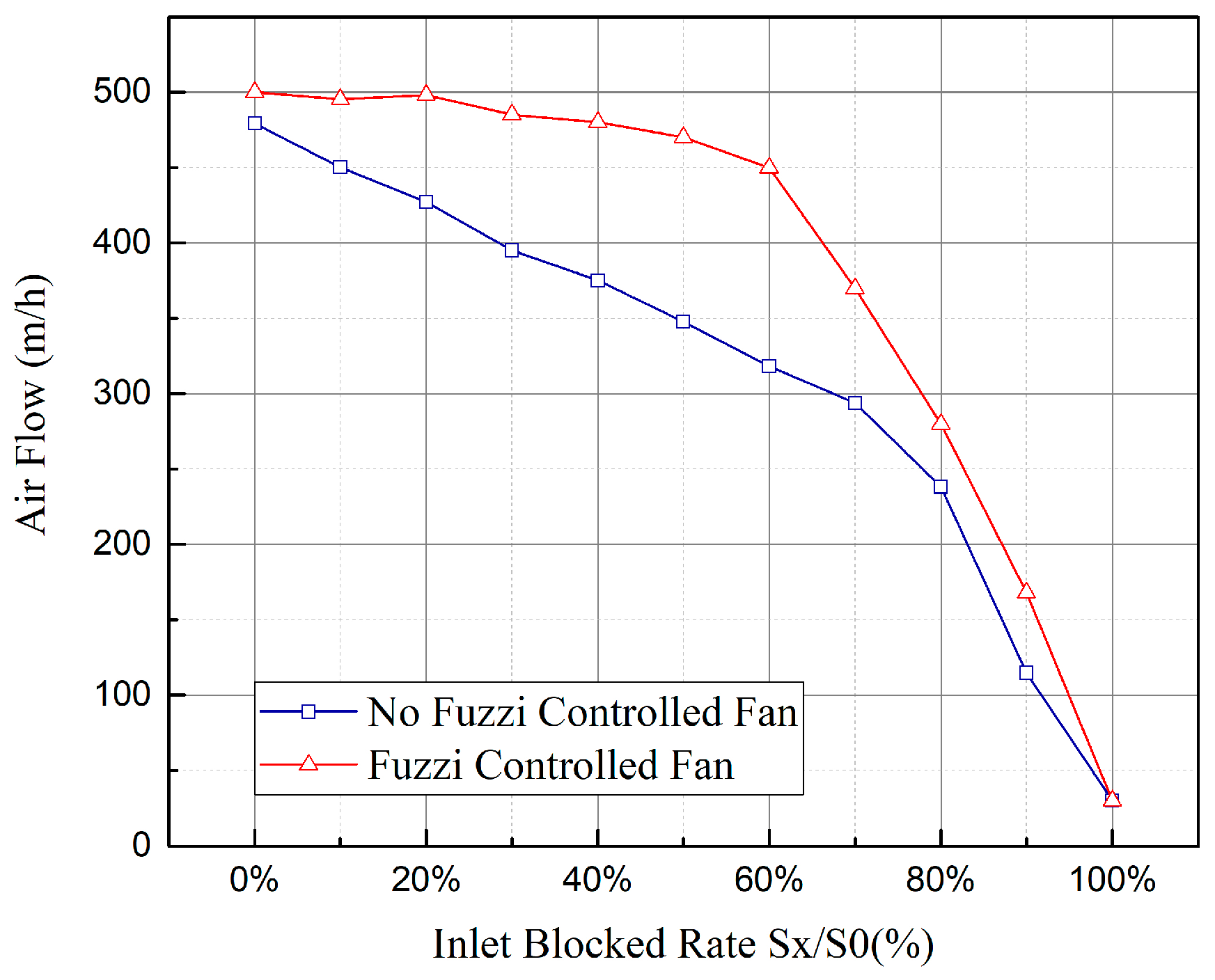
3.4. Testing Method and Testing Results Comparing
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, M.; Chen, M. Summarize on Constant Air Flow Control of Air-blower. Small Spec. Electr. Mach. 2007, 35, 57–59. [Google Scholar]
- Jiang, B.; Zhou, Y.; You, W. Research of Constant Air Volume Control Method for Centrifugal Fan Based on Motor Current. Electr. Appl. 2016, 45, 26–30. [Google Scholar]
- Wu, Z.; Li, X.; Lv, Y.; He, J. Design and implementation of constant air volume controller of fan motor without air velocity sensor. J. HVAC 2010, 40, 72–74. [Google Scholar]
- Studziński, J.; Ziółkowski, A. Control of Pumps of Water Supply Network under Hydraulic and Energy Optimisation Using Artificial Intelligence. Entropy 2020, 22, 1014. [Google Scholar] [CrossRef] [PubMed]
- Si, Y. Research on the Methods of Intelligent Regulation and Control to the Comfortable & Energy Saving Indoor Environment in Office Buildings. Ph.D. Thesis, Xi’an University of Architecture and Technology, Shaanxi, China, 2019. [Google Scholar]
- Tang, L. Neural Network and Fuzzy-Based Adaptive Control for Switched Nonlinear Systems. Ph.D. Thesis, Northeastern University, Liaoning, China, 2018. [Google Scholar]
- Liao, C. Research of Tracking control for Nonaffine System Based on Adaptive Fuzzy Theory. Ph.D. Thesis, Harbin Engineering University, Heilongjiang, China, 2015. [Google Scholar]
- Zhang, T. Research on the Inverse Design of Indoor Environment Based on Intelligence Algorithm and Fuzzy Logic Control. Ph.D. Thesis, Tianjin University, Tianjin, China, 2015. [Google Scholar]
- Uddin, M.N. Intelligent Control Fan Interior Permanent Synchronous Motor. Ph.D. Thesis, Memorial University of Newfoundland, St. John, NL, Canada, 2000. [Google Scholar]
- Butt, C.; Rahman, M.A. Intelligent speed control of interior permanent magnet motor drives. In Proceedings of the IECON 2006-32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 10 November 2006. [Google Scholar]
- Yoon, Y.D.; Sul, S.K. New flux weakening control for surface mounted permanent magnet synchronous machine using gradient descent method. In Proceedings of the 2007 7th International Conference on Power Electronics, Daegu, Republic of Korea, 26 October 2007. [Google Scholar]
- Depenbrock, M.; Ruhr-Univ, B. Direct Self-Control (DSC) of Inverter- Fed induction machine. In Proceedings of the IEEE Power Electronics Specialists Conference, Blacksburg, VA, USA, 21–26 June 1987. [Google Scholar]
- Holtz, J.; Lotzkat, W.; Khambadkone, A.M. Oncontinuous control of PWM inverters in the over modulation range including the six-step mode. IEEE Trans. Power Electron. 1993, 8, 546–553. [Google Scholar] [CrossRef]
- Petrovic, V.; Ortega, R.; Stankovic, A.M.; Tadmor, G. An adaptive controller for minimization of torque ripple in PM Synchronous motors. In Proceedings of the 29th Annual IEEE Power Electronics Specialists Conference, Fukuoka, Japan, 22 May 1998. [Google Scholar]
- Zaikui, M. Research on Automagical Fan Performances Testing Air Chamber; Huazhong University of Science and Technology: Huazhong, China, 2012. [Google Scholar]
- Hebbar, K.S.; Paranjpe, P.; Sridhara, K. Performance of conical jet nozzles in terms of discharge coefficient(Conical convergent nozzles discharge coefficient for varying pressure ratios). Aeronaut. Soc. India 1970, 22, 3–9. [Google Scholar]
- Phelan, J.J.; Russell, S.H.; Zeluff, W.C. A Study of the Influence of Reynolds Numberon the Performance of Centrifugal Fans. J. Eng. Gas Turbines Power 1979, 101, 670–676. [Google Scholar] [CrossRef]
- Szaniszlo, A.J. Experimental and analytical sonic nozzle discharge coefficients for reynolds numbers up to 8 × 106. J. Eng. Power 1975, 97, 521. [Google Scholar] [CrossRef]
- Wu, C.; Zhao, J. Reseach on the Influence of Impeller Structure on Flow Characteristics and Performance of the Centrifugal Fan; Shanghai University of Science and Technology: Shanghai, China, 2017. [Google Scholar]
- Chung, I.F.; Chen, Y.C.; Pal, N.R. Feature selection with controlled redundancy in a fuzzy rule based framework. IEEE Trans. Fuzzy Syst. 2018, 26, 734–748. [Google Scholar] [CrossRef]
- Hao, Y. Deriving analytical Input–Output relationship for fuzzy controllers using arbitrary input fuzzy sets and Zadeh fuzzy and operator. IEEE Trans. Fuzzy Syst. 2006, 14, 654–662. [Google Scholar]
- Stetco, A.; Zeng, X.J.; Keane, J. Fuzzy C-means++: Fuzzy C-means with effective seeding initialization. Expert Syst. Appl. 2015, 42, 7541–7548. [Google Scholar] [CrossRef]
- Hashemzadeh, M.; Oskouei, A.G.; Farajzadeh, N. New fuzzy C-means clustering method based on feature-weight and cluster-weight learning. Appl. Soft Comput. 2019, 78, 324–345. [Google Scholar] [CrossRef]
- Han, M.; Zhong, K.; Qiu, T.; Han, B. Interval type-2 fuzzy neural network for chaotic time series prediction: A concise overview. IEEE Trans. Cybern. 2018, 7, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Xie, B.; Lee, S. An extended type-reduction method for general type-2 fuzzy sets. IEEE Trans. Fuzzy Syst. 2017, 25, 715–724. [Google Scholar] [CrossRef]
- Juang, C.F.; Hung, C.W.; Hsu, C.H. Rule-based cooperative continuous ant colony optimization to improve the accuracy of fuzzy system design. IEEE Trans. Fuzzy Syst. 2014, 22, 723–735. [Google Scholar] [CrossRef]
- Terziyska, M.; Todorov, Y.; Dobreva, M. Efficient error based metrics for fuzzy-neural network performance evaluation. In Advanced Computing in Industrial Mathematics, Proceedings of the 11th Annual Meeting of the Bulgarian Section of SIAM, Sofia, Bulgaria, 20–22 December 2018; Springer International Publishing: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Na, R.; Wang, X. An Improved Vector-Control System of PMSM Based on Fuzzy Logic Controller. In Proceedings of the International Symposium on Computer, Consumer and Control. International Symposium on Computer, Consumer and Control, Taichung, Taiwan, 10–12 June 2014; pp. 326–331. [Google Scholar]
- Zhang, R.; Song, L.P.; Yang, J.L.; Hoffman, T. DC Motor Speed Control System Simulation Based on Fuzzy Self-tuning PID. In Proceedings of the 3rd International Conference on Fuzzy Information and Engineering, Chongqing, China, 26–29 September 2009; Volume 62, pp. 967–975. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E | NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|---|
| Ec | ||||||||
| NB | NB | NB | NB | NM | NM | 0 | 0 | |
| NM | NB | NB | NB | NM | NM | 0 | PS | |
| NS | NM | NM | NM | NS | 0 | PS | PS | |
| ZO | NM | NM | NS | 0 | PS | PS | PM | |
| PS | NS | NS | 0 | PS | PM | PM | PM | |
| PM | NS | 0 | PS | PM | PM | PB | PM | |
| PB | 0 | 0 | PM | PM | PM | PB | PB | |
| E | NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|---|
| Ec | ||||||||
| NB | NB | NB | NM | NM | NS | 0 | 0 | |
| NM | NB | NB | NM | NS | NS | 0 | 0 | |
| NS | NB | NM | NS | NS | 0 | PS | PS | |
| ZO | NM | NM | NS | 0 | PS | PM | PM | |
| PS | NM | NS | 0 | PS | PS | PM | PB | |
| PM | 0 | 0 | PS | PS | PM | PB | PB | |
| PB | 0 | 0 | PS | PM | PM | PB | PB | |
| E | NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|---|
| Ec | ||||||||
| NB | PS | NS | NB | NB | NB | NM | PS | |
| NM | PS | NS | NB | NM | NM | NS | 0 | |
| NS | 0 | NS | NM | NM | NS | NS | 0 | |
| ZO | 0 | NS | NS | NS | NS | NS | 0 | |
| PS | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| PM | 0 | PS | PS | PS | PS | PS | PB | |
| PB | PB | PM | PM | PM | PS | PS | PB | |
| Motor Max Output Power | 200 (W) |
|---|---|
| Rated phase current | 0.75 (A) |
| Pole numbers of the motor | 8 Poles |
| Motor EMF coefficient | 54.67 (V/rpm) |
| Stator phase resistance | 22.4 (Ω) |
| Stator d axis Inductance | 12.80 (mH) |
| Stator q axis Inductance | 12.80 (mH) |
| Motor Max Output Power | 120 (W) |
|---|---|
| Rated phase current | 0.75 (A) |
| Pole numbers of the motor | 4 Poles |
| Resistance of main phase | 31.4 Ohm |
| Resistance of Aux phase | 32.6 Ohm |
| Capacitor | 6 uF/450 VAC |
| Inlet Blocked Rate Sx/S0 (%) | Airflow (m/h) | Current (A) | Fan Impeller Speed (RPM) | Input Power (W) |
|---|---|---|---|---|
| 0% | 500 (499.75) | 1.116 (0.98) | 1959 (1958) | 120 (193) |
| 10% | 495.2 (450.1) | 1.10 (0.953) | 1970 (2005) | 119 (186) |
| 20% | 498 (427.2) | 1.13 (0.913) | 1980 (2116) | 122 (180) |
| 30% | 485 (395.1) | 1.05 (0.925) | 2000 (2172) | 115 (175) |
| 40% | 480 (375.1) | 1.04 (0.905) | 2060 (2198) | 113 (167) |
| 50% | 470 (347.8) | 1.02 (0.828) | 2127 (2282) | 108 (158) |
| 60% | 450 (318.1) | 1.05 (0.802) | 2419 (2367) | 115 (151) |
| 70% | 370 (293.8) | 1.12 (0.734) | 2691 (2430) | 121 (141) |
| 80% | 280 (238.1) | 1.10 (0.661) | 2922 (2548) | 119 (125) |
| 90% | 168 (114.8) | 0.85 (0.542) | 3139 (2761) | 86 (88) |
| 100% | 30 (30.2) | 0.732 (0.514) | 3168 (2848) | 72 (74) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, W.; Si, H.; Li, Y.; Wang, H.; Qiu, J.; Li, G. Fuzzy Control Algorithm Applied on Constant Airflow Controlling of Fans. Energies 2023, 16, 4425. https://doi.org/10.3390/en16114425
Sun W, Si H, Li Y, Wang H, Qiu J, Li G. Fuzzy Control Algorithm Applied on Constant Airflow Controlling of Fans. Energies. 2023; 16(11):4425. https://doi.org/10.3390/en16114425
Chicago/Turabian StyleSun, Wangsheng, Haiqing Si, Yao Li, Haibo Wang, Jingxuan Qiu, and Gen Li. 2023. "Fuzzy Control Algorithm Applied on Constant Airflow Controlling of Fans" Energies 16, no. 11: 4425. https://doi.org/10.3390/en16114425
APA StyleSun, W., Si, H., Li, Y., Wang, H., Qiu, J., & Li, G. (2023). Fuzzy Control Algorithm Applied on Constant Airflow Controlling of Fans. Energies, 16(11), 4425. https://doi.org/10.3390/en16114425