
Time Estimation Algorithm of Single-Phase-to-Ground Fault Based on Two-Step Dimensionality Reduction


Abstract
:1. Introduction
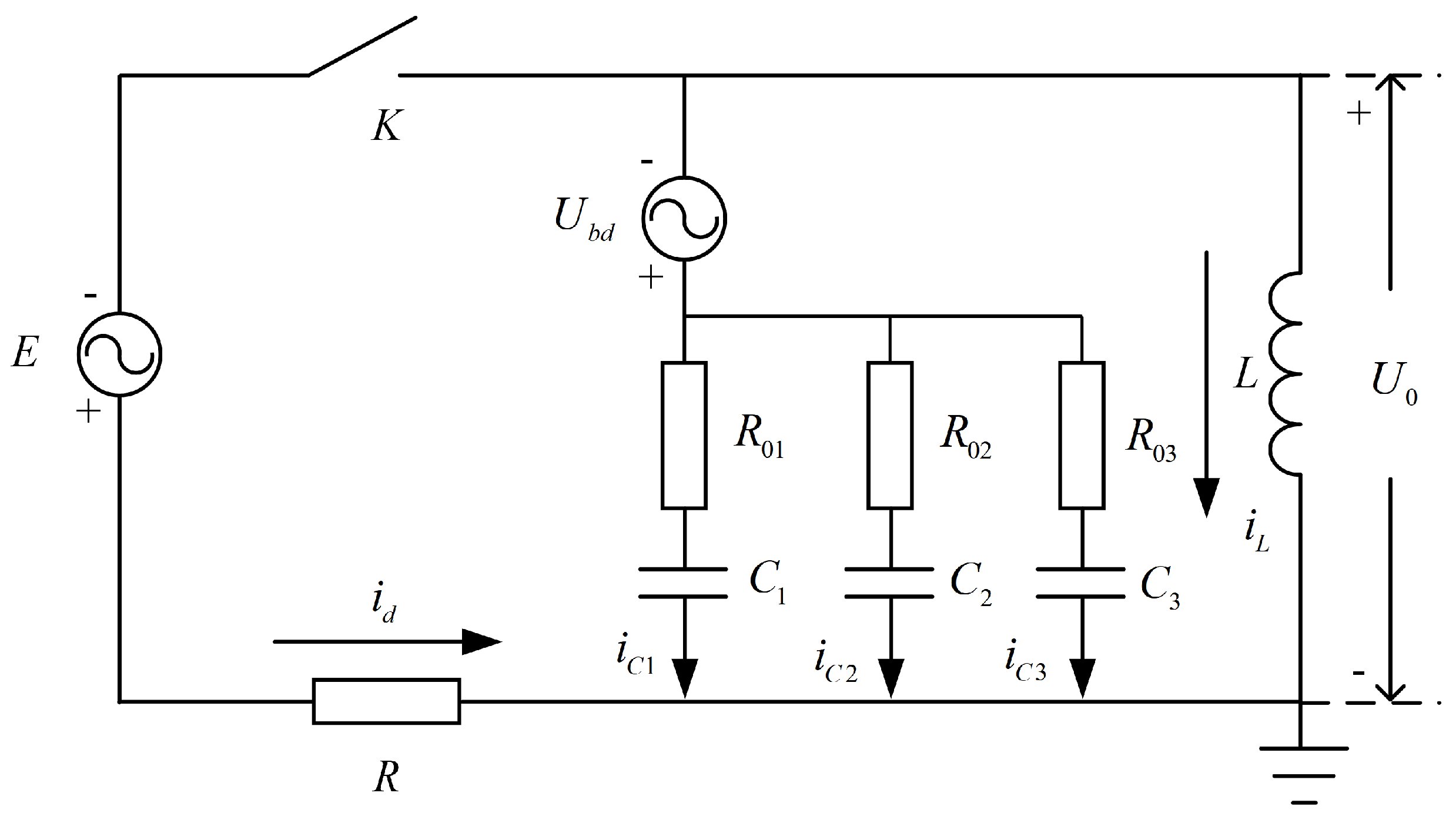
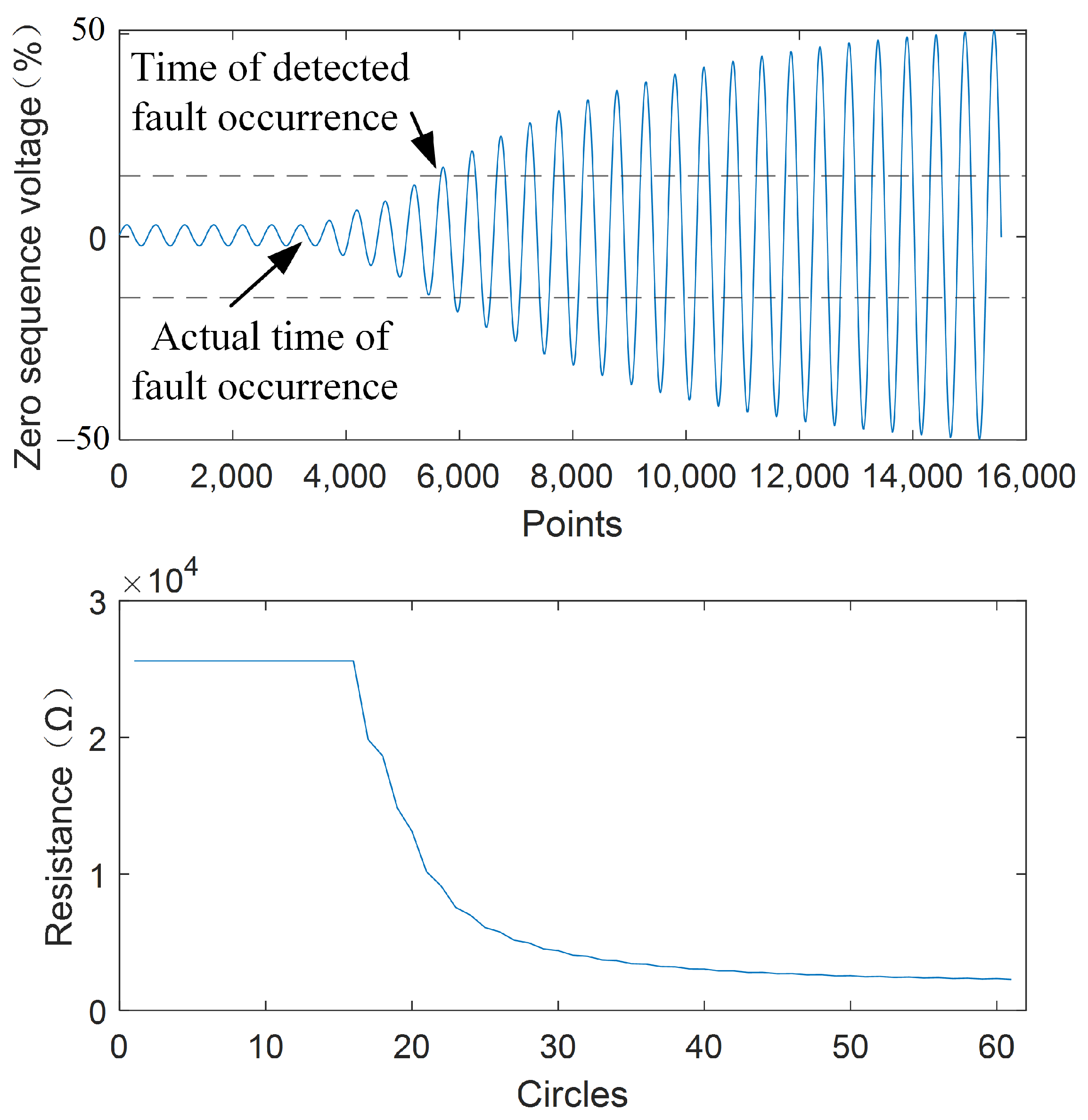
2. Analysis of Hysteresis Characteristics of Zero-Sequence Voltage Rise after Fault
3. Identification Algorithm of Single-Phase-to-Ground Fault Occurrence Time
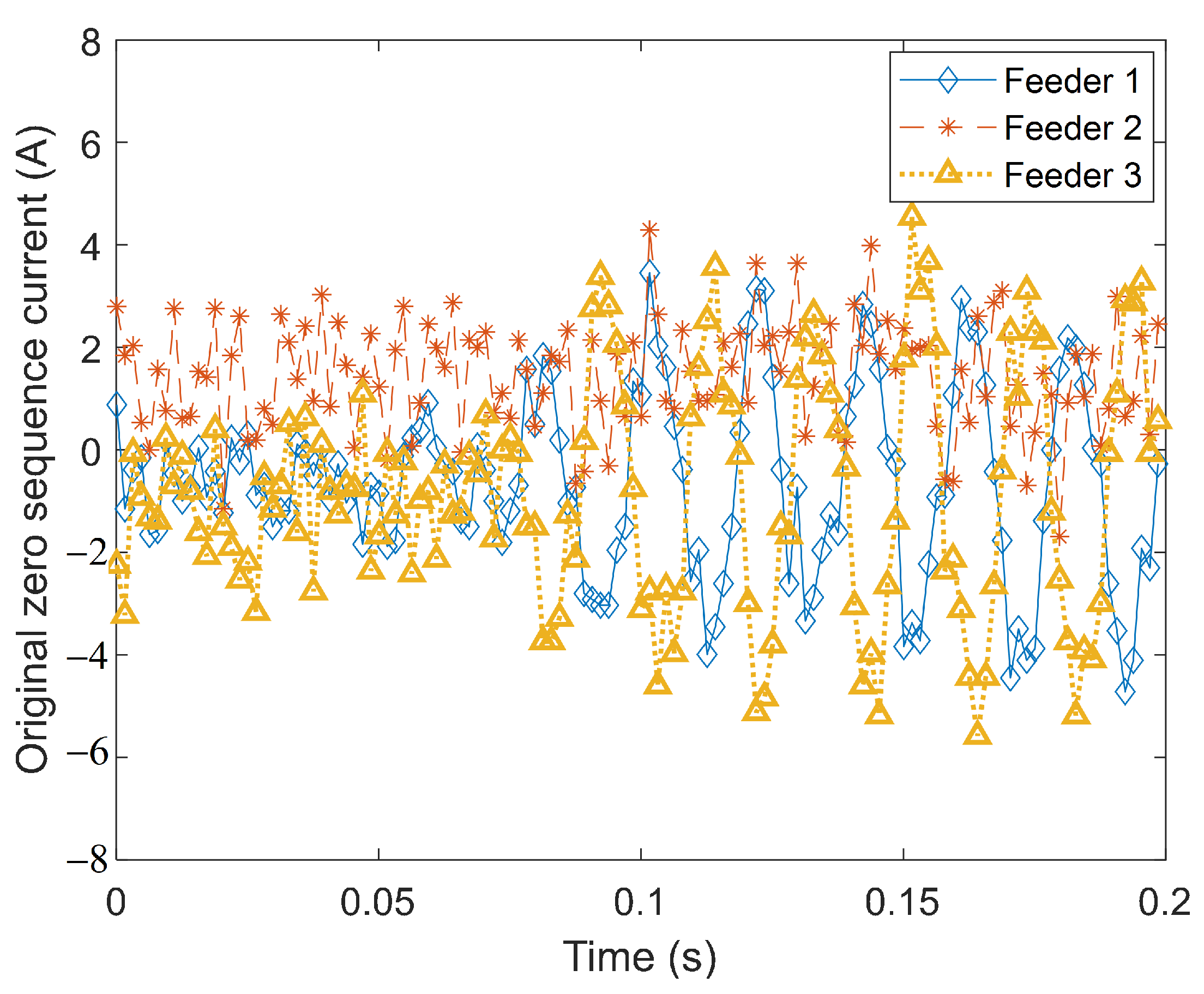
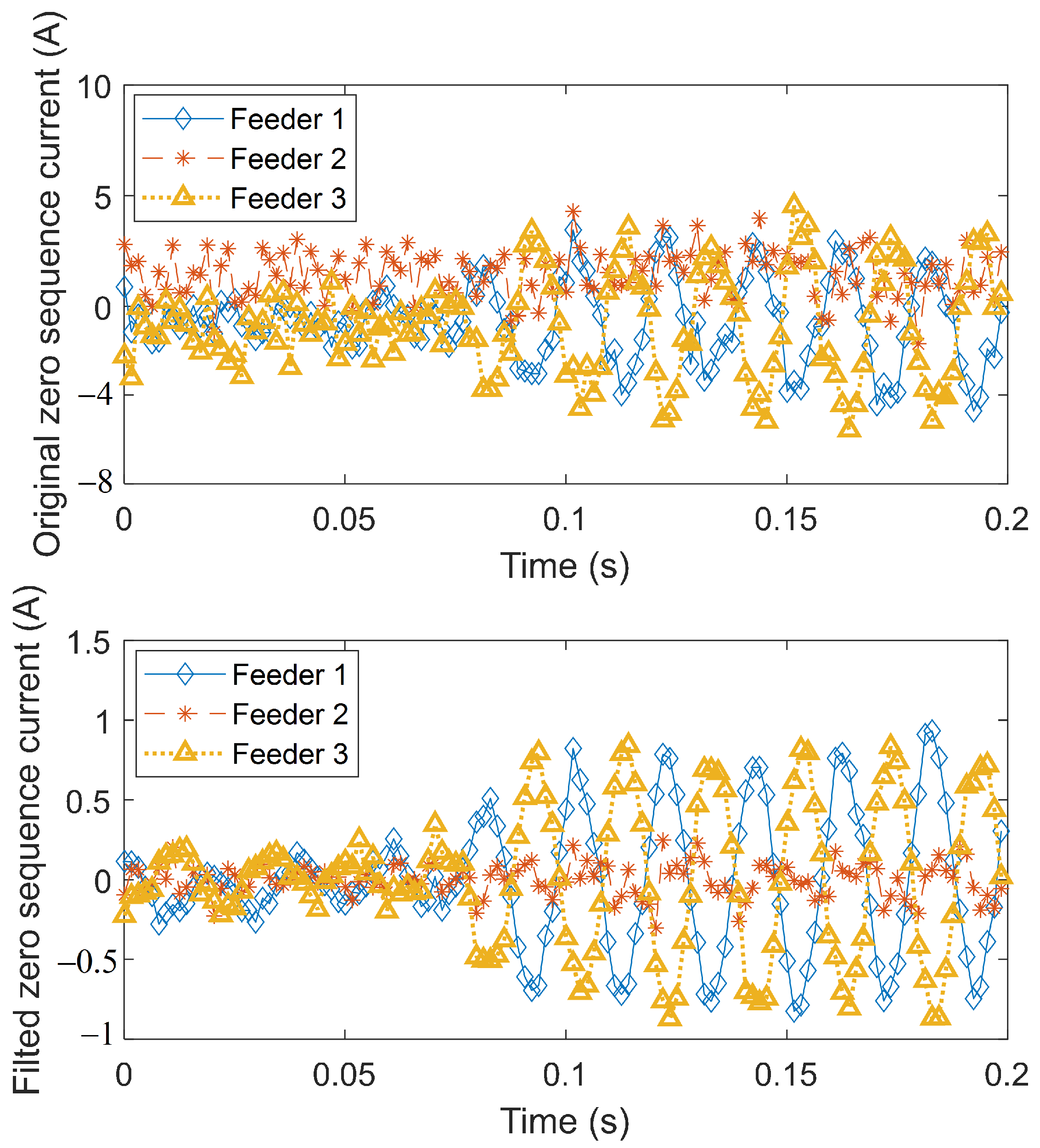
3.1. Zero-Sequence Current Signal Preprocessing Method Based on Empirical Mode Decomposition
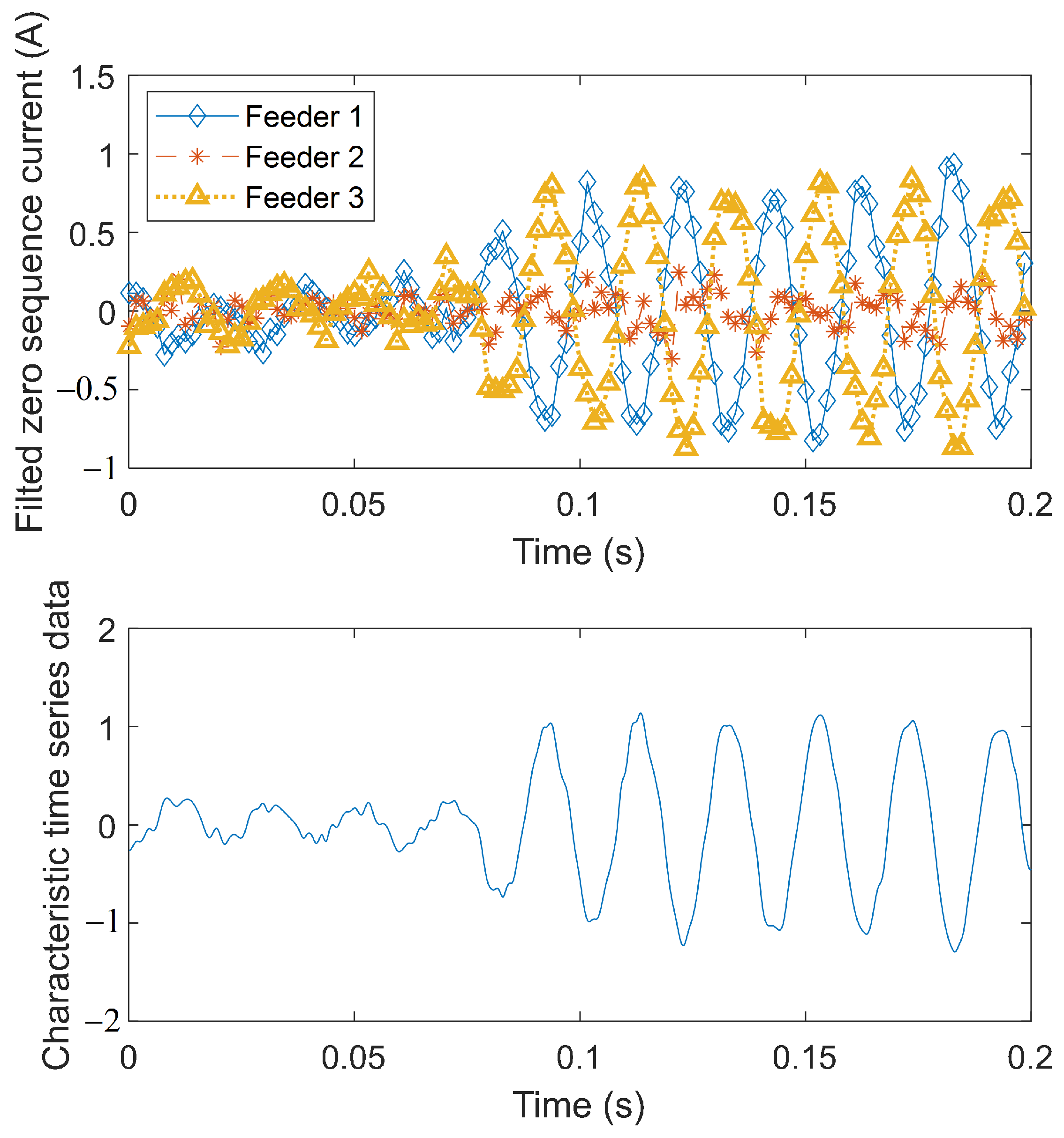
3.2. First Dimension Reduction Based on Principal Component Analysis
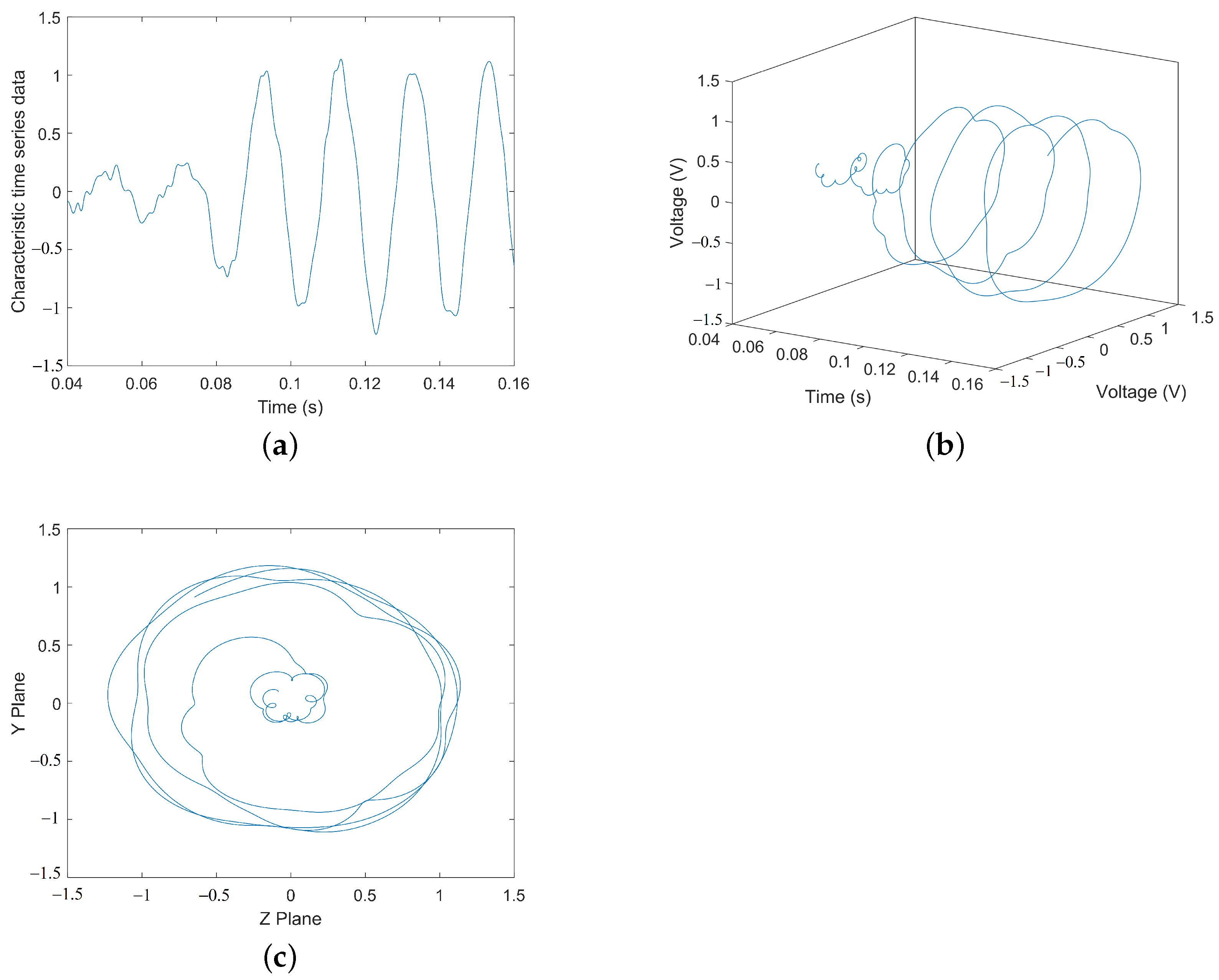
3.3. Second Dimension Reduction Based on Hilbert Transform Mapping
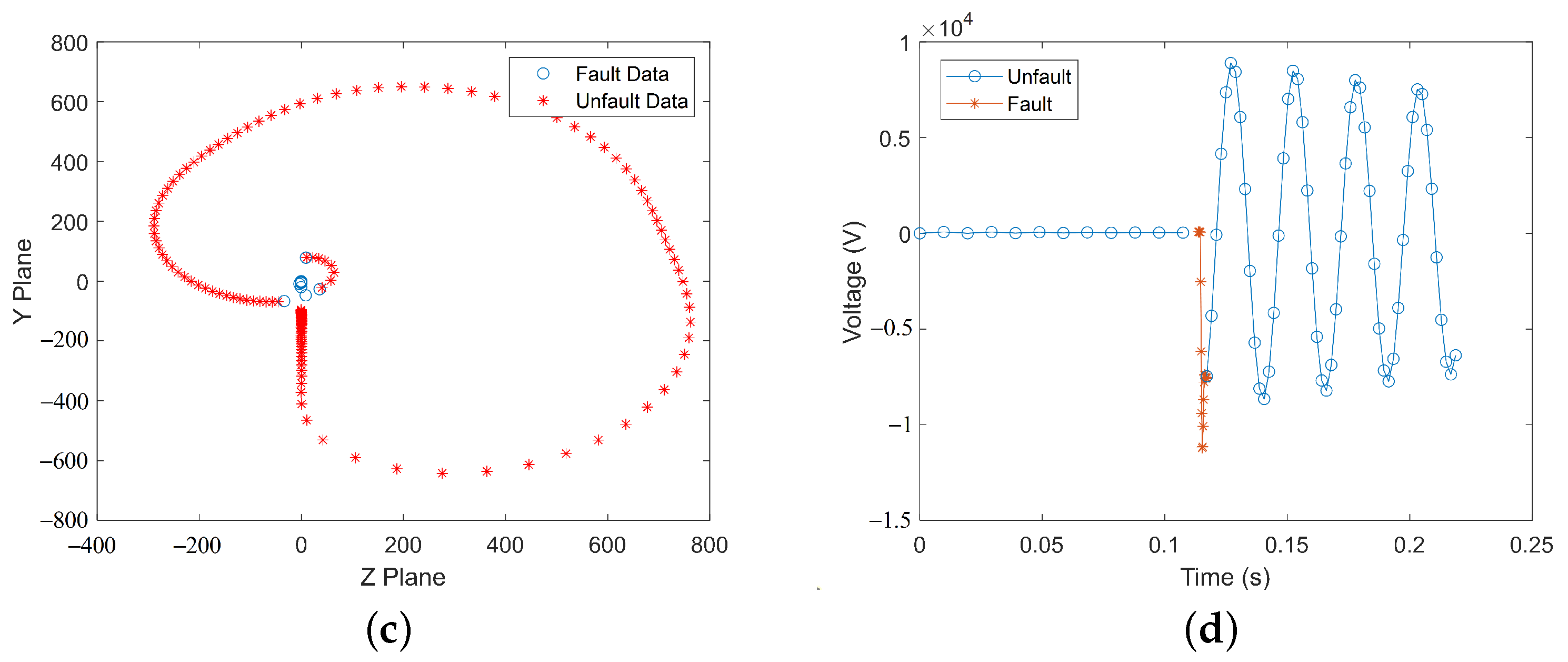
3.4. Density-Based Clustering Fault Occurrence Time Identification Method
4. Verification of Accuracy of Single-Phase-to-Ground Fault Time Identification
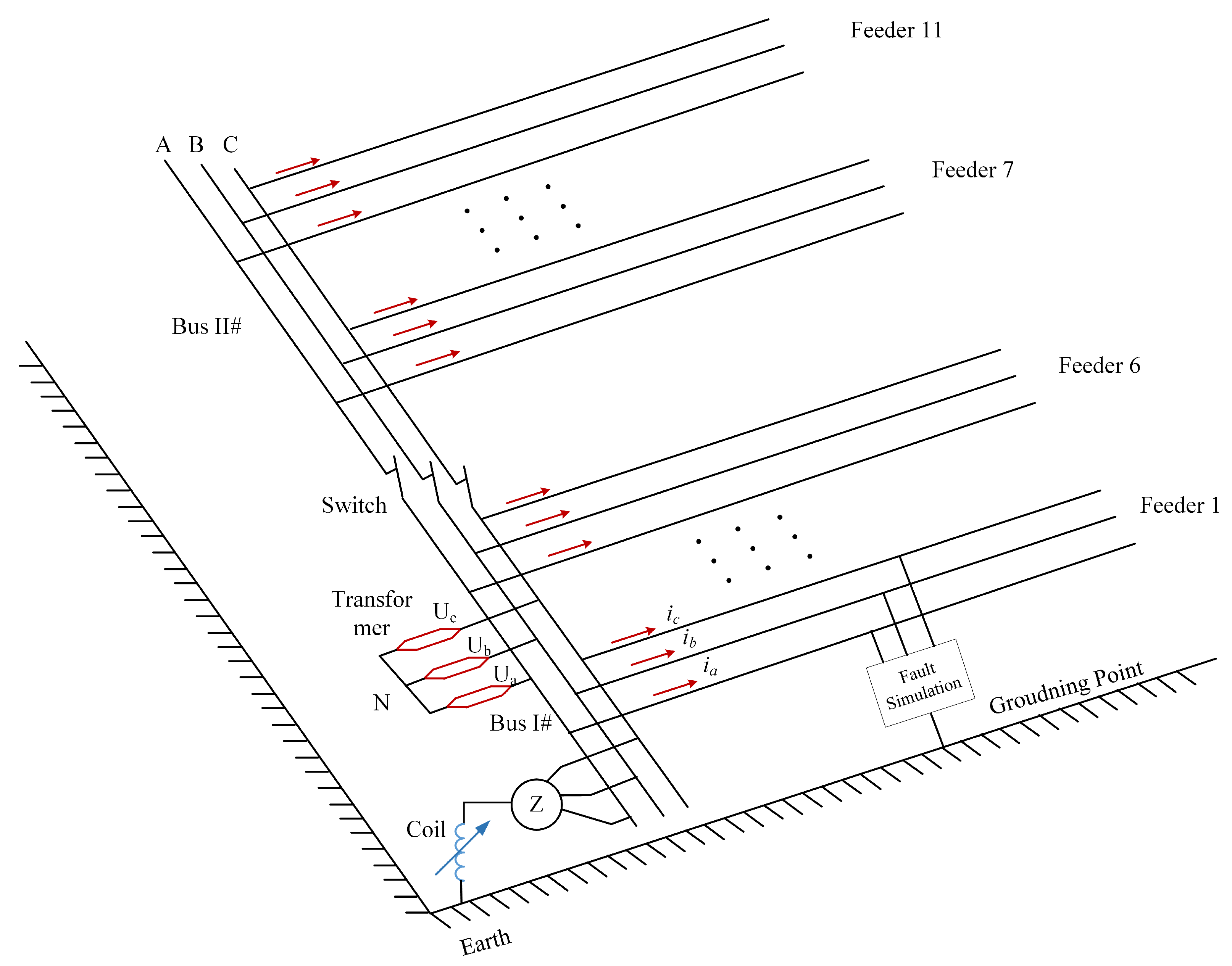
4.1. Test Platform
4.2. Algorithm Sensitivity Verification
4.3. Identification and Verification of Transient Faults
4.4. Algorithm Stability Verification
5. Conclusions
- (1)
- There are features in the high-dimensional data composed of feeder zero-sequence currents that can be used to identify fault occurrence times. This algorithm performs feature extraction through two dimensionality reductions, amplifying the feature difference before and after the fault. The unsupervised density-based clustering algorithm can realize relatively accurate fault-time estimation.
- (2)
- This method can study dimensionality reduction for data of arbitrary dimensions. It has low dependence on the structure of the original dataset and is suitable for studying complex distribution networks. The dimensionality reduction process is repeatable with a clear mathematical theoretical meaning.
- (3)
- Experimental validation shows that this method can not only identify single-phase-to-ground faults but also has the ability to identify source-side grounding, load-side grounding, and transient grounding faults. The identification accuracy is within 7.3 ms, the experimental results presented in this study demonstrate that the proposed method exhibits better detection performance compared to the threshold detection method, which is able to effectively reduce the search range for fault characteristics in the selection process, and the method has a certain ability to cope with system noise.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Benner, C.L.; Russell, B.D. Practical high-impedance fault detection on distribution feeders. IEEE Trans. Ind. Appl. 1997, 33, 635–640. [Google Scholar] [CrossRef]
- Xu, Y.; Guo, M.; Chen, B.; Yang, G. Modeling and simulation analysis of arc in distribution network. Power Syst. Prot. Control 2015, 43, 57–62. [Google Scholar]
- Qiu, J.; Cui, X.; Tian, Y.; Wang, B.; Li, G. Analysis of the arc high impedance grounding faults voltage characteristics in non-effective grounding feeders. Power Syst. Prot. Control 2019, 47, 115–121. [Google Scholar]
- Bakar, A.H.A.; Ali, M.; Tan, C.; Mokhlis, H.; Arof, H.; Illias, H. High impedance fault location in 11 kV underground distribution systems using wavelet transforms. Int. J. Electr. Power Energy Syst. 2014, 55, 723–730. [Google Scholar] [CrossRef]
- Ghaderi, A.; Ginn III, H.L.; Mohammadpour, H.A. High impedance fault detection: A review. Electr. Power Syst. Res. 2017, 143, 376–388. [Google Scholar] [CrossRef]
- Wang, S.; Dehghanian, P. On the use of artificial intelligence for high impedance fault detection and electrical safety. IEEE Trans. Ind. Appl. 2020, 56, 7208–7216. [Google Scholar] [CrossRef]
- Tian, Y.; Xu, T.; Li, Y.; Deng, X.; Wang, Y. Fault line selection in a resonant earthed system based on reconstruction error and multi-scale cross-sample entropy. Power Syst. Prot. Control 2021, 49, 95–104. [Google Scholar]
- Liang, Y.L.; Li, K.J.; Ma, Z.; Lee, W.J. Typical fault cause recognition of single-phase-to-ground fault for overhead lines in nonsolidly earthed distribution networks. IEEE Trans. Ind. Appl. 2020, 56, 6298–6306. [Google Scholar] [CrossRef]
- Wu, W.; Zhang, X.; Zhang, J.; He, Y.; Bai, W. An improved Hausdorff distance method for locating single phase to ground fault in neutral non-effectively grounded system. IET Gener. Transm. Distrib. 2021, 15, 2747–2759. [Google Scholar] [CrossRef]
- Li, J.; Wang, G.; Zeng, D.; Li, H. High-impedance ground faulted line-section location method for a resonant grounding system based on the zero-sequence current’s declining periodic component. Int. J. Electr. Power Energy Syst. 2020, 119, 105910. [Google Scholar] [CrossRef]
- Chen, D.; Hu, B.; Li, Y.; Zhang, W.; Qi, Y.; Wang, R. Analysis of the Influence of Voltage Recovery Process on Line Selection Device When Single-phase Grounding Fault Is Removed. In Proceedings of the 2020 IEEE Sustainable Power and Energy Conference (iSPEC), Chengdu, China, 23–25 November 2020; pp. 1772–1777. [Google Scholar]
- Feng, G.; Guan, T.; Wang, L.; Xue, Y.; Yu, X.; Xu, B. Grounding fault line selection of non-solidly grounding system based on linearity of current and voltage derivative. Power Syst. Technol. 2021, 45, 302–311. [Google Scholar]
- Jiang, B.; Dong, X.; Shi, S. A method of single phase to ground fault feeder selection based on single phase current traveling wave for distribution lines. Proc. CSEE 2014, 34, 6216–6227. [Google Scholar]
- Jiang, B.; Dong, X.; Shi, S.; Wang, B. A Method of Adaptive Time Frequency Window Traveling Wave Based Fault Feeder Selection. Proc. CSEE 2015, 35, 6837–6897. [Google Scholar]
- Fang, Y.; Xue, Y.; Song, H.; Guan, T.; Yang, F.; Xu, B. Transient energy analysis and faulty feeder identification method of high impedance fault in the resonant grounding system. Proc. CSEE 2018, 38, 5636–5645. [Google Scholar]
- Wei, M.; Shi, F.; Zhang, H.; Jin, Z.; Terzija, V.; Zhou, J.; Bao, H. High impedance arc fault detection based on the harmonic randomness and waveform distortion in the distribution system. IEEE Trans. Power Deliv. 2019, 35, 837–850. [Google Scholar] [CrossRef]
- Ghaderi, A.; Mohammadpour, H.A.; Ginn, H.L.; Shin, Y.J. High-impedance fault detection in the distribution network using the time-frequency-based algorithm. IEEE Trans. Power Deliv. 2014, 30, 1260–1268. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Fan, S.; Ma, X.; Deng, S. Single-phase-to-ground fault line selection method based on STOA-SVM. J. Phys. Conf. Ser. 2021, 2095, 012029. [Google Scholar] [CrossRef]
- Wei, H.; Wei, H.; Lyu, Z.; Bai, X.; Tian, J. Deep Belief Network Based Faulty Feeder Detection of Single-Phase Ground Fault. IEEE Access 2021, 9, 158961–158971. [Google Scholar] [CrossRef]
- Liang, Y.; Li, K.J.; Ma, Z.; Lee, W.J. Multilabel classification model for type recognition of single-phase-to-ground fault based on KNN-Bayesian method. IEEE Trans. Ind. Appl. 2021, 57, 1294–1302. [Google Scholar] [CrossRef]
- Fan, M.; Xia, J.; Meng, X.; Zhang, K. Single-phase grounding fault types identification based on multi-feature transformation and fusion. Sensors 2022, 22, 3521. [Google Scholar] [CrossRef]
- Xue, Y.; Li, J.; Xu, B. Transient equivalent circuit and transient analysis of single-phase earth fault in arc suppression coil grounded system. Proc. CSEE 2015, 35, 5703–5714. [Google Scholar]
- Boudraa, A.O.; Cexus, J.C. EMD-based signal filtering. IEEE Trans. Instrum. Meas. 2007, 56, 2196–2202. [Google Scholar] [CrossRef]
- Wang, N.; Wang, S.; Jia, Q. The method to reduce identification feature of different voltage sag disturbance source based on principal component analysis. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar]
- Jie, Z.; Jian, L.; Hongtao, Z.; Yue, S. Sinusoidal representation of transient signal based on Hilbert transform. In Proceedings of the 2021 IEEE International Conference on Data Science and Computer Application (ICDSCA), Dalian, China, 29–31 October 2021; pp. 280–285. [Google Scholar]
- Jolliffe, I.T. Principal Component Analysis for Special Types of Data; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | System Capacity Current (A) | Residual Current (A) | Grounding Mode | Medium |
|---|---|---|---|---|
| 1 | 68 | −7 | Unbroken single-phase-to-ground | Soil |
| 2 | 68 | −7 | Unbroken single-phase-to-ground | Sand |
| 3 | 68 | −7 | Unbroken single-phase-to-ground | Cement |
| 4 | 68 | −7 | Unbroken single-phase-to-ground | Tree Branch |
| 5 | 68 | −7 | Unbroken single-phase-to-ground | Water |
| 6 | 68 | −7 | Unbroken single-phase-to-ground | Tile |
| 7 | 68 | −26 | Ground at the power supply side | Soil |
| 8 | 68 | −26 | Ground at the power supply side | Grass |
| 9 | 68 | −26 | Ground at the load side | Soil |
| 10 | 68 | −26 | Ground at the load side | Grass |
| 11 | 68 | 26 | Single-phase-instantaneous-to-ground | Metal |
| Experiments | Medium | Identify Fault Moment | Percentage of Post-Fault Neutral Voltage | Threshold Method Identification Time |
|---|---|---|---|---|
| single-phase-to-ground fault | Soil | 0.75 ms | failed | |
| single-phase-to-ground fault | Sand | 7.3 ms | failed | |
| single-phase-to-ground fault | Cement | 0.05 ms | failed | |
| single-phase-to-ground fault | Tree Branch | −0.85 ms | failed | |
| single-phase-to-ground fault | Water | −5 ms | failed | |
| single-phase-to-ground fault | Tile | −0.1 ms | failed | |
| Ground fault at the power supply side | Soil | −2.7 ms | 29 ms | |
| Ground fault at the power supply side | Grass | −3.4 ms | 8 ms | |
| Ground fault at the load side | Soil | 6.5 ms | 6.3 s | |
| Ground fault at the load side | Grass | 4.5 ms | failed | |
| Single-phase-instantaneous-to-ground | Metal | −0.7 ms | (0.9 s) | 0.9 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, X.; Chen, H.; Xu, K.; Xu, J. Time Estimation Algorithm of Single-Phase-to-Ground Fault Based on Two-Step Dimensionality Reduction. Energies 2023, 16, 4921. https://doi.org/10.3390/en16134921
Lin X, Chen H, Xu K, Xu J. Time Estimation Algorithm of Single-Phase-to-Ground Fault Based on Two-Step Dimensionality Reduction. Energies. 2023; 16(13):4921. https://doi.org/10.3390/en16134921
Chicago/Turabian StyleLin, Xin, Haoran Chen, Kai Xu, and Jianyuan Xu. 2023. "Time Estimation Algorithm of Single-Phase-to-Ground Fault Based on Two-Step Dimensionality Reduction" Energies 16, no. 13: 4921. https://doi.org/10.3390/en16134921
APA StyleLin, X., Chen, H., Xu, K., & Xu, J. (2023). Time Estimation Algorithm of Single-Phase-to-Ground Fault Based on Two-Step Dimensionality Reduction. Energies, 16(13), 4921. https://doi.org/10.3390/en16134921