
Distributed Consensus Hierarchical Optimization and Control Method for Integrated Energy System Based on Event-Triggered Mechanism
Abstract
:1. Introduction
2. Distributed Consensus Hierarchical Optimization and Control Method for IES Based on Event-Triggered Mechanism
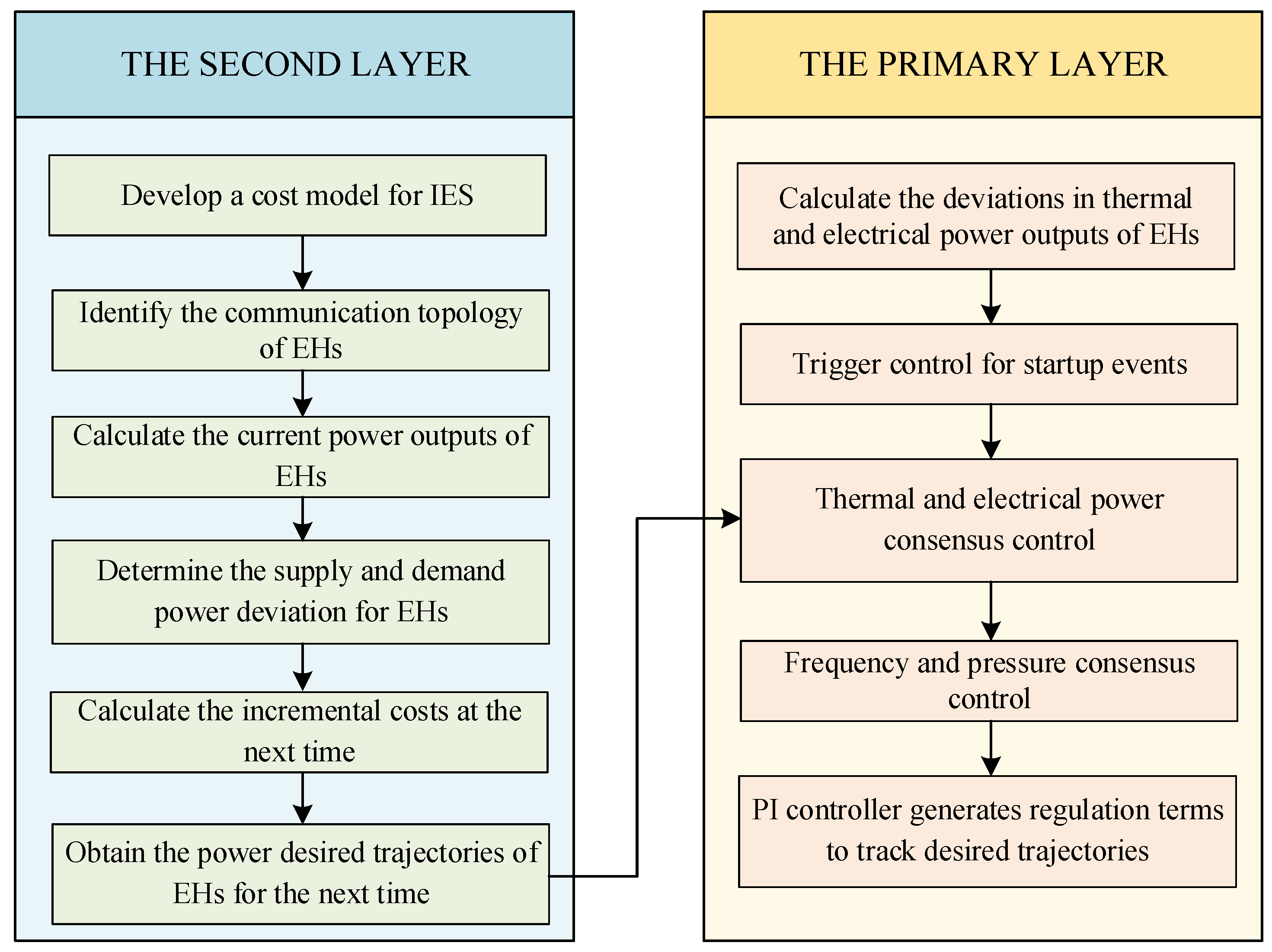
2.1. Economic Optimization Strategy Based on Equal Increment Principle for IES in the Second Layer
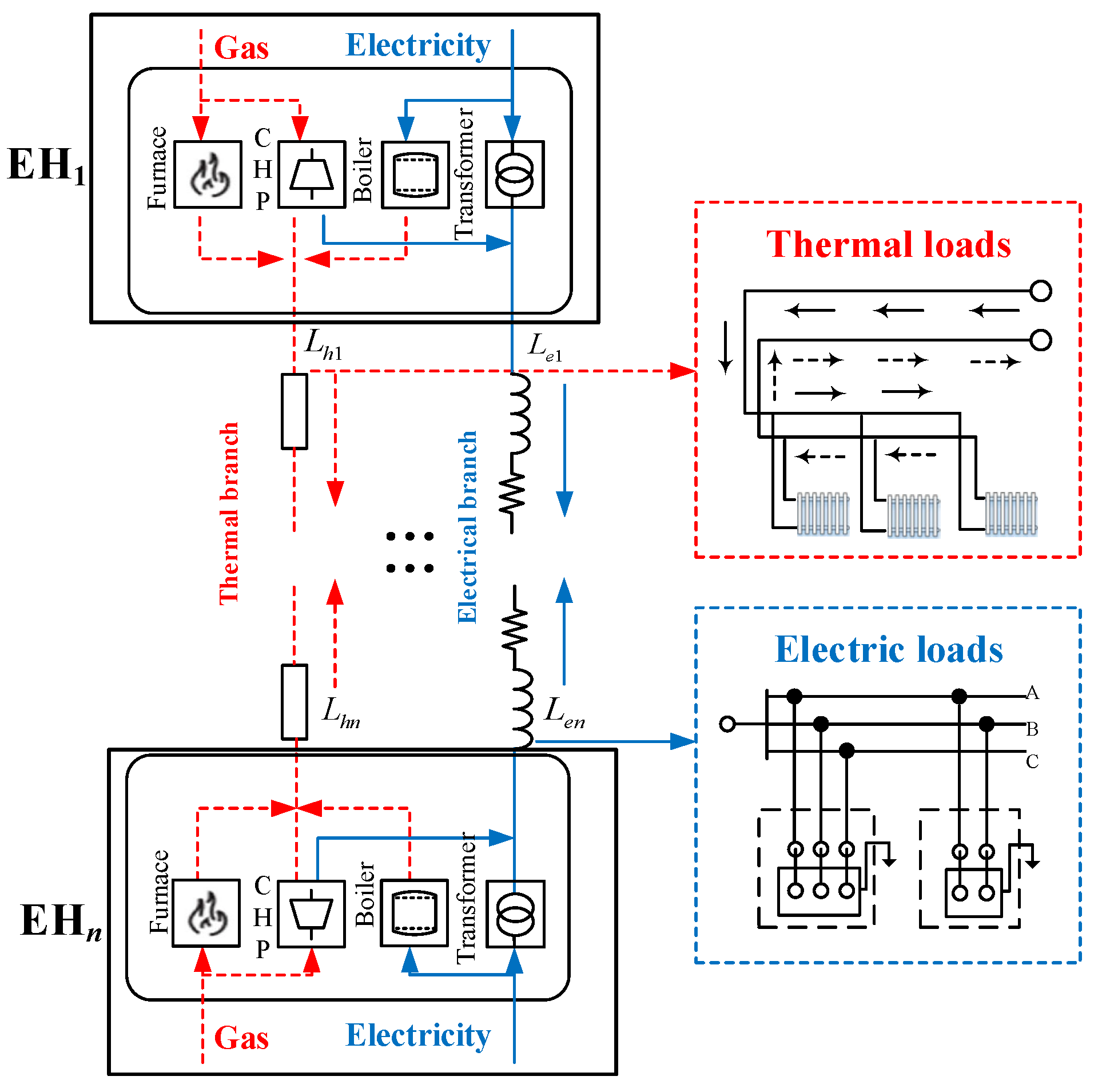
2.1.1. System Model
2.1.2. Incremental Cost Economic Optimization Strategy
2.2. Event-Triggered Consensus Control Method for EHs in the Primary Level
2.2.1. Dynamic Event-Triggered Communication Mechanism
2.2.2. Distributed Consensus Control Based on Event-Triggered Mechanism for EHs
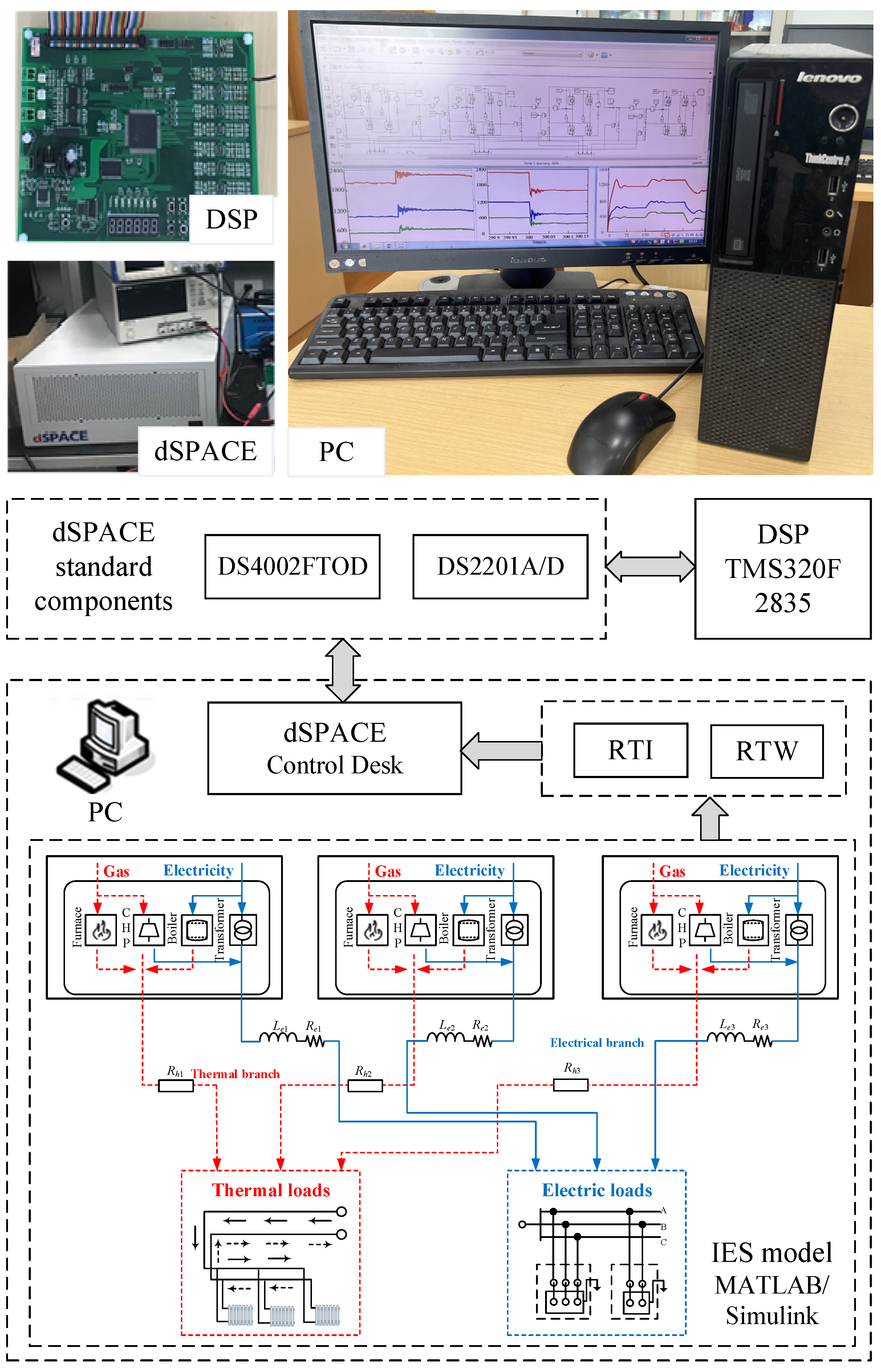
3. Experimental Results Analysis
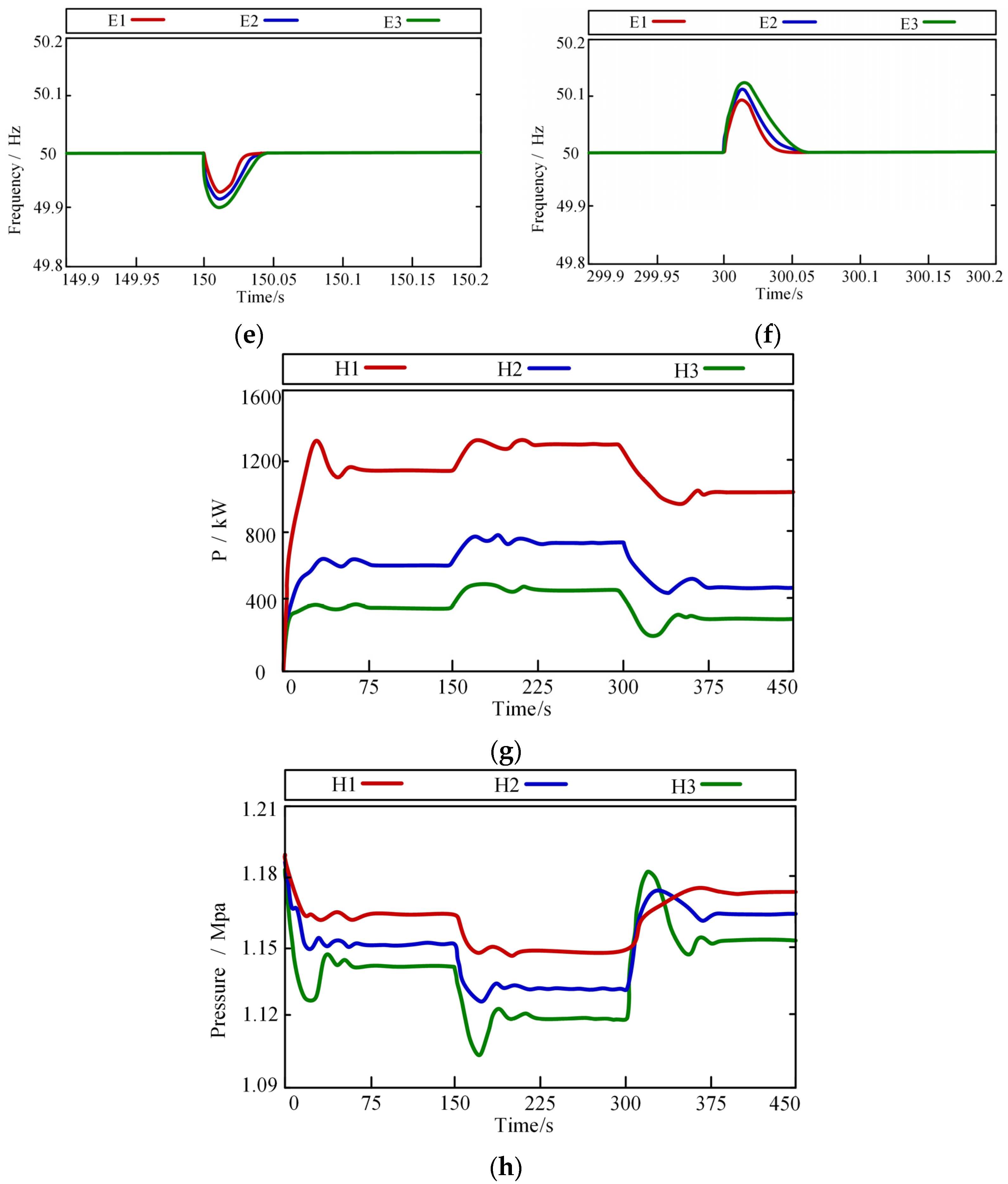
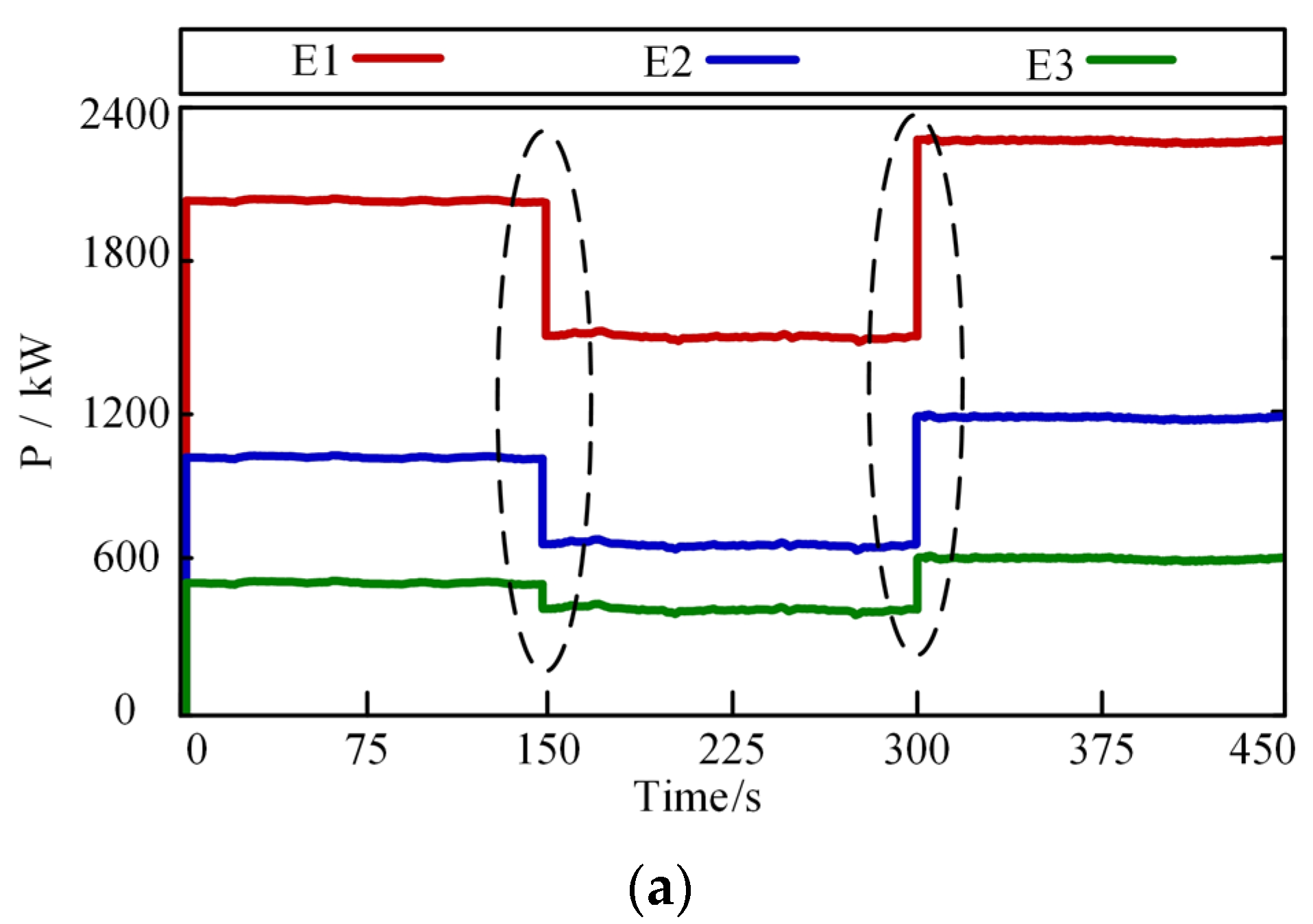
3.1. Experimental Results Analysis for Case 1
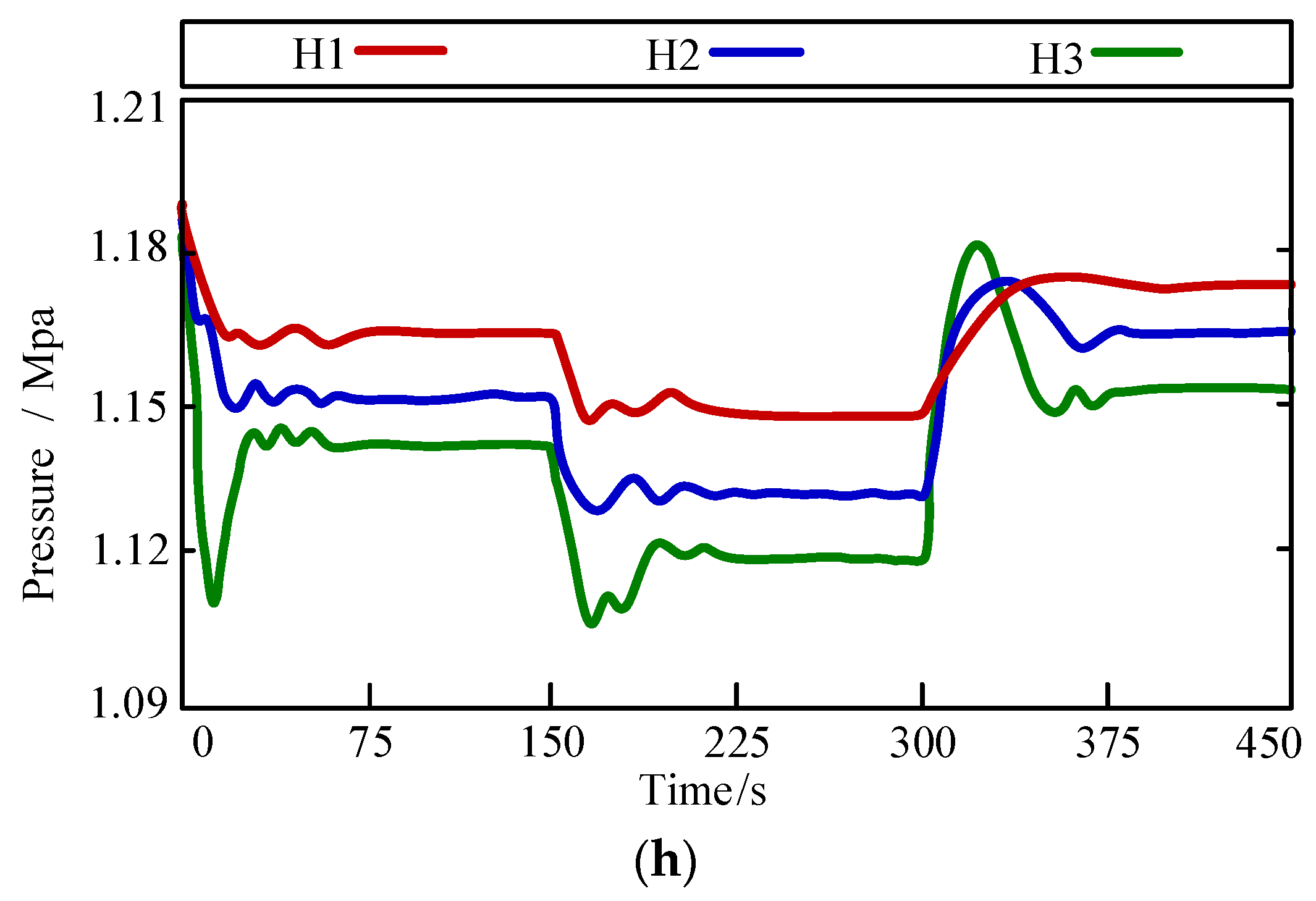
3.2. Experimental Results Analysis for Case 2
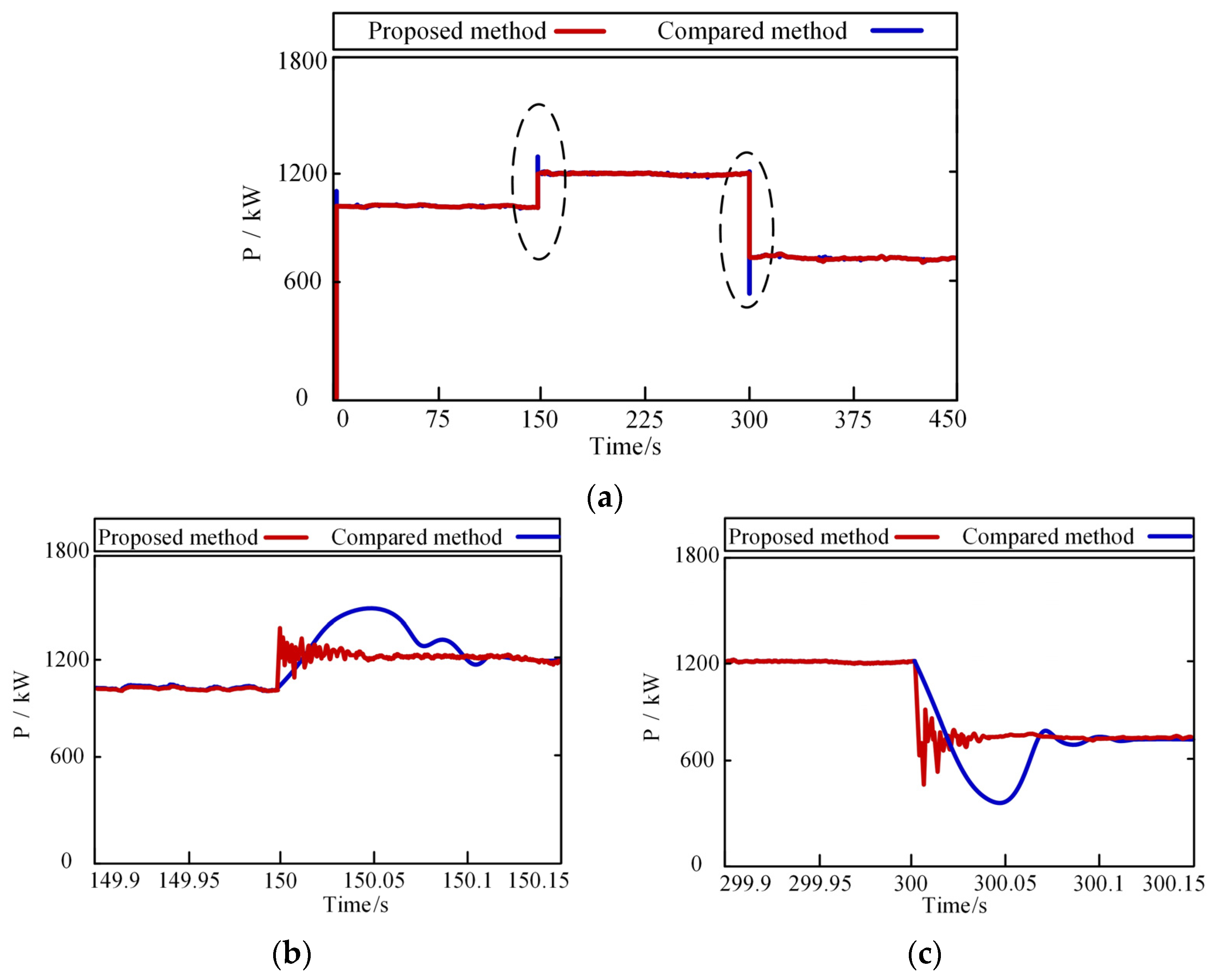
3.3. Performance Comparison of Different Control Methods
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, C.; Yang, H.; Shahidehpour, M.; Xu, Z.; Zhou, B.; Cao, Y.; Zeng, L. Optimal Planning of Islanded Integrated Energy System with Solar-Biogas Energy Supply. IEEE Trans. Sustain. Energy 2019, 11, 2437–2448. [Google Scholar] [CrossRef]
- Schick, C.; Klempp, N.; Hufendiek, K. Role and Impact of Prosumers in a Sector-Integrated Energy System with High Renewable Shares. IEEE Trans. Power Syst. 2020, 37, 3286–3298. [Google Scholar] [CrossRef]
- Strezoski, L.; Padullaparti, H.; Ding, F.; Baggu, M. Integration of Utility Distributed Energy Resource Management System and Aggregators for Evolving Distribution System Operators. J. Mod. Power Syst. Clean Energy 2022, 10, 277–285. [Google Scholar] [CrossRef]
- Liu, N.; Tan, L.; Sun, H.; Zhou, Z.; Guo, B. Bilevel Heat–Electricity Energy Sharing for Integrated Energy Systems with Energy Hubs and Prosumers. IEEE Trans. Ind. Inform. 2021, 18, 3754–3765. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, X.; Li, K.; Zhang, N.; Strbac, G.; Kang, C. Resilience Oriented Planning of Urban Multi-Energy Systems with Generalized Energy Storage Sources. IEEE Trans. Power Syst. 2021, 37, 2906–2918. [Google Scholar] [CrossRef]
- Liu, F.; Chen, C.; Lin, C.; Li, G.; Xie, H.; Bie, Z. Utilizing Aggregated Distributed Renewable Energy Sources with Control Coordination for Resilient Distribution System Restoration. IEEE Trans. Sustain. Energy 2023, 14, 1043–1056. [Google Scholar] [CrossRef]
- Xu, Z.; Han, G.; Liu, L.; Martinez-Garcia, M.; Wang, Z. Multi-Energy Scheduling of an Industrial Integrated Energy System by Reinforcement Learning-Based Differential Evolution. IEEE Trans. Green Commun. Netw. 2021, 5, 1077–1090. [Google Scholar] [CrossRef]
- Xu, D.; Wu, Q.; Zhou, B.; Li, C.; Bai, L.; Huang, S. Distributed Multi-Energy Operation of Coupled Electricity, Heating, and Natural Gas Networks. IEEE Trans. Sustain. Energy 2019, 11, 2457–2469. [Google Scholar] [CrossRef]
- Sharma, S.; Verma, A.; Xu, Y.; Panigrahi, B.K. Robustly Coordinated Bi-Level Energy Management of a Multi-Energy Building Under Multiple Uncertainties. IEEE Trans. Sustain. Energy 2019, 12, 3–13. [Google Scholar] [CrossRef]
- Mohammadi, M.; Noorollahi, Y.; Mohammadi-Ivatloo, B.; Hosseinzadeh, M.; Yousefi, H.; Khorasani, S.T. Optimal management of energy hubs and smart energy hubs—A review. Renew. Sustain. Energy Rev. 2018, 89, 33–50. [Google Scholar] [CrossRef]
- Jadidbonab, M.; Mohammadi-Ivatloo, B.; Marzband, M.; Siano, P. Short-Term Self-Scheduling of Virtual Energy Hub Plant Within Thermal Energy Market. IEEE Trans. Ind. Electron. 2020, 68, 3124–3136. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Wang, N.; Wang, Z.; Dou, X.; Zhang, Y.; Yang, Z.; Maréchal, F.; Wang, L.; Yang, Y. Energy hub-based optimal planning framework for user-level integrated energy systems: Considering synergistic effects under multiple uncertainties. Appl. Energy 2021, 307, 118099. [Google Scholar] [CrossRef]
- Li, C.; Yang, Y.; Wang, Z.; Wang, N.; Wang, L.; Yang, Z. Energy hub-based optimal planning for integrated energy systems considering part-load characteristics and synergistic effect of equipment. Glob. Energy Interconnect. 2021, 4, 169–183. [Google Scholar] [CrossRef]
- Ayele, G.T.; Haurant, P.; Laumert, B.; Lacarrière, B. An extended energy hub approach for load flow analysis of highly coupled district energy networks: Illustration with electricity and heating. Appl. Energy 2018, 212, 850–867. [Google Scholar] [CrossRef]
- Sun, J.; Yang, J.; Zheng, W.X.; Li, S. Periodic Event-Triggered Control for a Class of Nonminimum-Phase Nonlinear Systems Using Dynamic Triggering Mechanism. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 69, 1302–1311. [Google Scholar] [CrossRef]
- Liu, K.; Ji, Z. Dynamic Event-Triggered Consensus of General Linear Multi-Agent Systems with Adaptive Strategy. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3440–3444. [Google Scholar] [CrossRef]
- Wang, B.; Huang, J.; Wen, C.; Rodriguez, J.; Garcia, C.; Gooi, H.B.; Zeng, Z. Event-triggered model predictive control for power converters. IEEE Trans. Ind. Electron. 2021, 68, 715–720. [Google Scholar] [CrossRef]
- Li, P.; Kang, Y.; Wang, T.; Zhao, Y.-B. Disturbance Prediction-Based Adaptive Event-Triggered Model Predictive Control for Perturbed Nonlinear Systems. IEEE Trans. Autom. Control 2022, 68, 2422–2429. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.-L.; Wang, Z. A Dynamic Event-Triggered Transmission Scheme for Distributed Set-Membership Estimation Over Wireless Sensor Networks. IEEE Trans. Cybern. 2017, 49, 171–183. [Google Scholar] [CrossRef]
- Zhang, K.; Zhou, B.; Zheng, W.X.; Duan, G.-R. Event-Triggered and Self-Triggered Gain Scheduled Control of Linear Systems with Input Constraints. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 6452–6463. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| EH1 | Electric power output | 2049.3 kW |
| Thermal power output | 982.3 kW | |
| Economic cost | 2882.1 RMB | |
| EH2 | Electric power output | 981.8 kW |
| Thermal power output | 471.5 kW | |
| Economic cost | 787.8 RMB | |
| EH3 | Electric power output | 489.3 kW |
| Thermal power output | 237.3 kW | |
| Economic cost | 405.9 RMB | |
| Rated frequency of electrical branch | 50 Hz | |
| Allowable range of pressure for thermal branch | 1.08–1.12 MPa | |
| Time | EH | Electric Output | Thermal Output | Economic Cost |
|---|---|---|---|---|
| 150 s | EH1 | 1668.4 kW | 794.5 kW | 2276.9 RMB |
| EH2 | 798.9 kW | 381.4 kW | 622.4 RMB | |
| EH3 | 353.2 kW | 165.2 kW | 320.7 RMB | |
| 300 s | EH1 | 2685.7 kW | 1368.7 kW | 3660.3 RMB |
| EH2 | 1261.4 kW | 687.4 kW | 1003.7 RMB | |
| EH3 | 574.6 kW | 235.2 kW | 515.5 RMB |
| Time | EH | Electric Output | Thermal Output | Economic Cost |
|---|---|---|---|---|
| 150 s | EH1 | 1442.8 kW | 1326.7 kW | 2507.5 RMB |
| EH2 | 784.6 kW | 598.2 kW | 685.4 RMB | |
| EH3 | 293.4 kW | 266.2 kW | 353.1 RMB | |
| 300 s | EH1 | 2346.3 kW | 783.4 kW | 3112.7 RMB |
| EH2 | 1017.8 kW | 456.5 kW | 811.4 RMB | |
| EH3 | 656.3 kW | 151.2 kW | 418.1 RMB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, J.; Liu, B.; Yuan, Z.; Chen, Y.; Wang, Y.; Xue, H.; Ling, C.; Zhang, K. Distributed Consensus Hierarchical Optimization and Control Method for Integrated Energy System Based on Event-Triggered Mechanism. Energies 2023, 16, 5146. https://doi.org/10.3390/en16135146
Ye J, Liu B, Yuan Z, Chen Y, Wang Y, Xue H, Ling C, Zhang K. Distributed Consensus Hierarchical Optimization and Control Method for Integrated Energy System Based on Event-Triggered Mechanism. Energies. 2023; 16(13):5146. https://doi.org/10.3390/en16135146
Chicago/Turabian StyleYe, Jun, Bo Liu, Zhiqiang Yuan, Yunhui Chen, Yufei Wang, Hua Xue, Chen Ling, and Kening Zhang. 2023. "Distributed Consensus Hierarchical Optimization and Control Method for Integrated Energy System Based on Event-Triggered Mechanism" Energies 16, no. 13: 5146. https://doi.org/10.3390/en16135146