

Potential Energy Recovery and Direct Reuse System of Hydraulic Hybrid Excavators Based on the Digital Pump

Abstract
:1. Introduction
2. Potential Energy Recovery and Direct Reuse Energy Recovery System
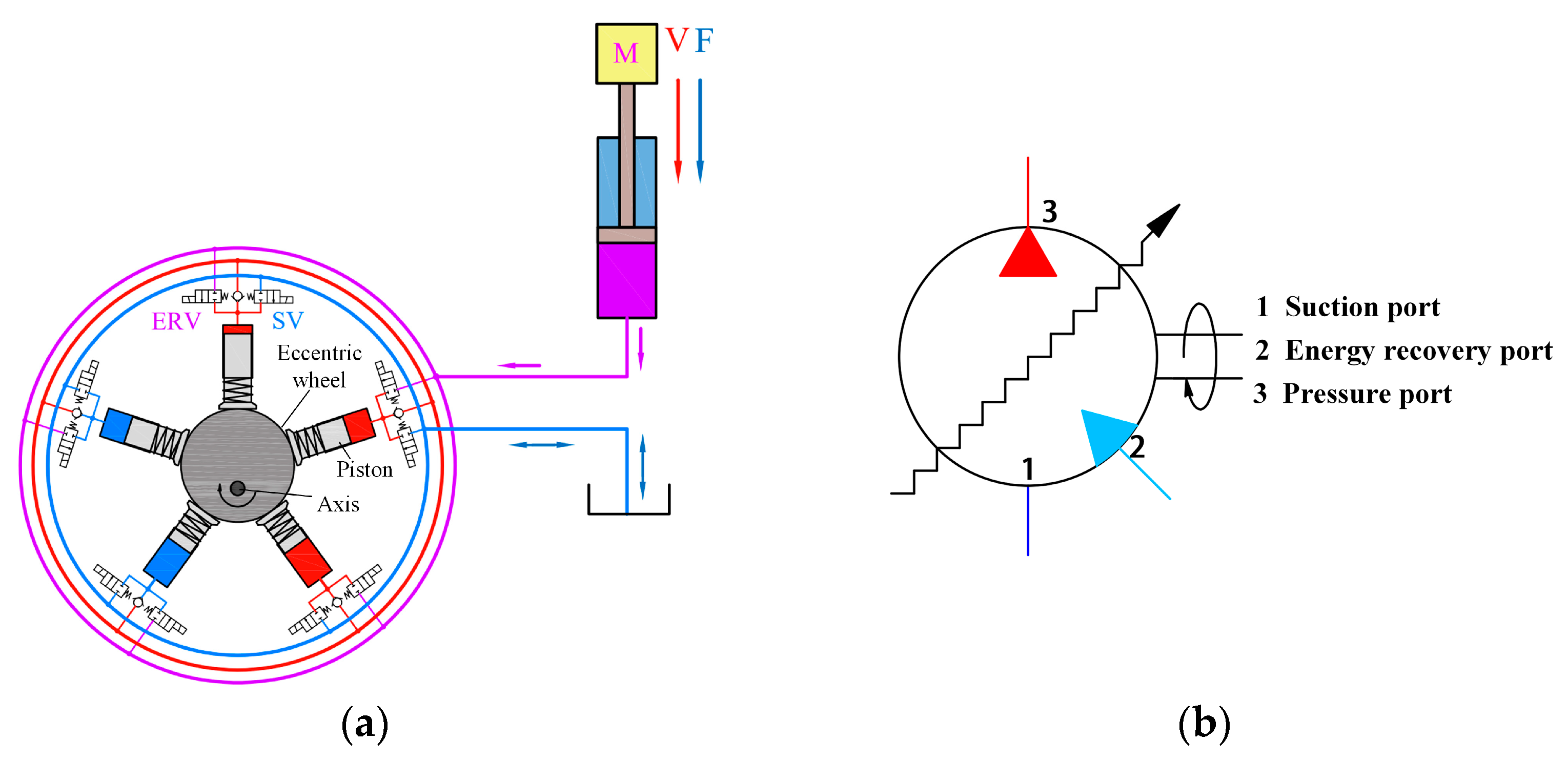
2.1. Structure and Working Principles of the Digital Pump
2.2. Structure and Working Principles of the ERDRS
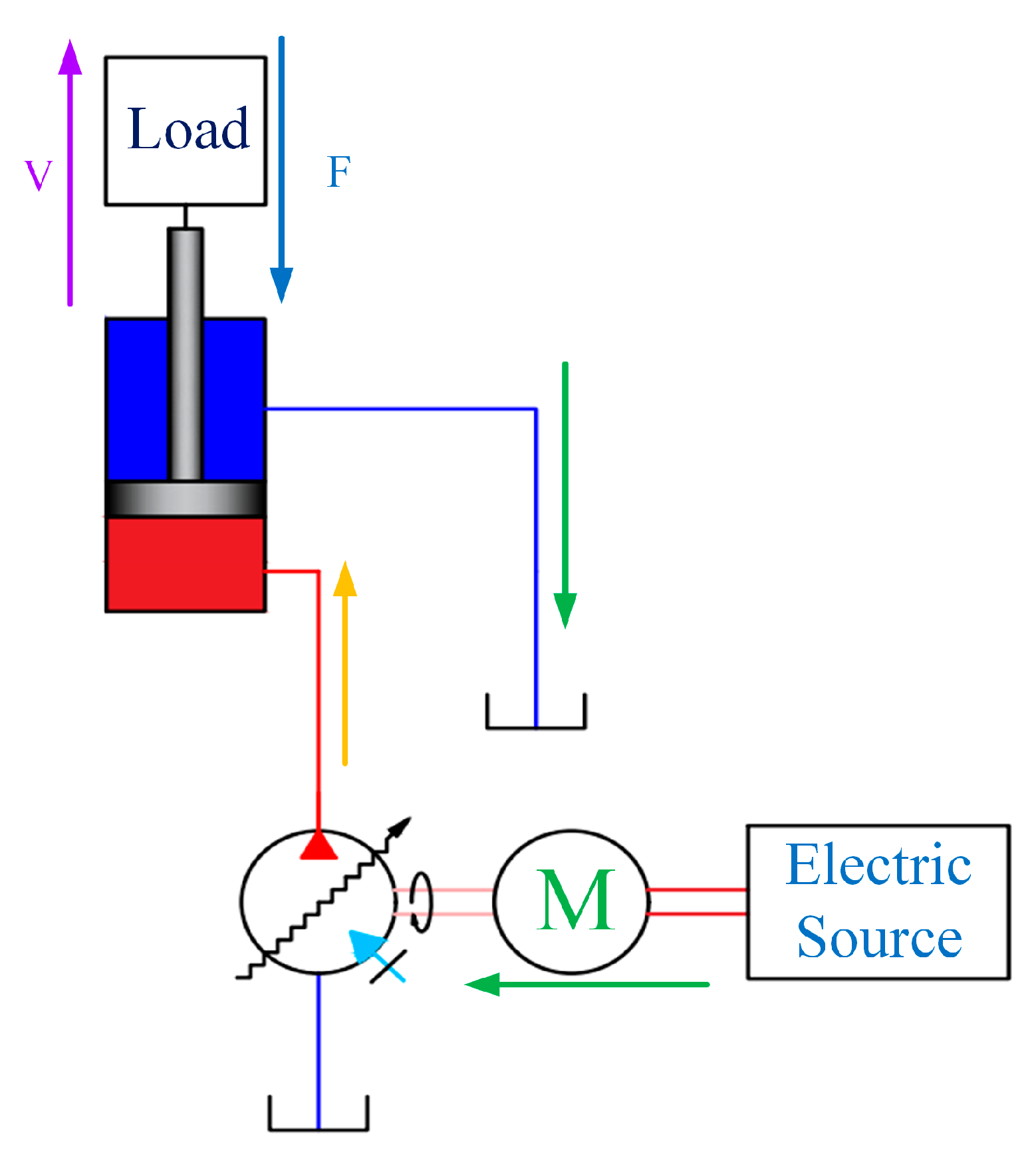
2.2.1. Pumping Mode Operation (PM)
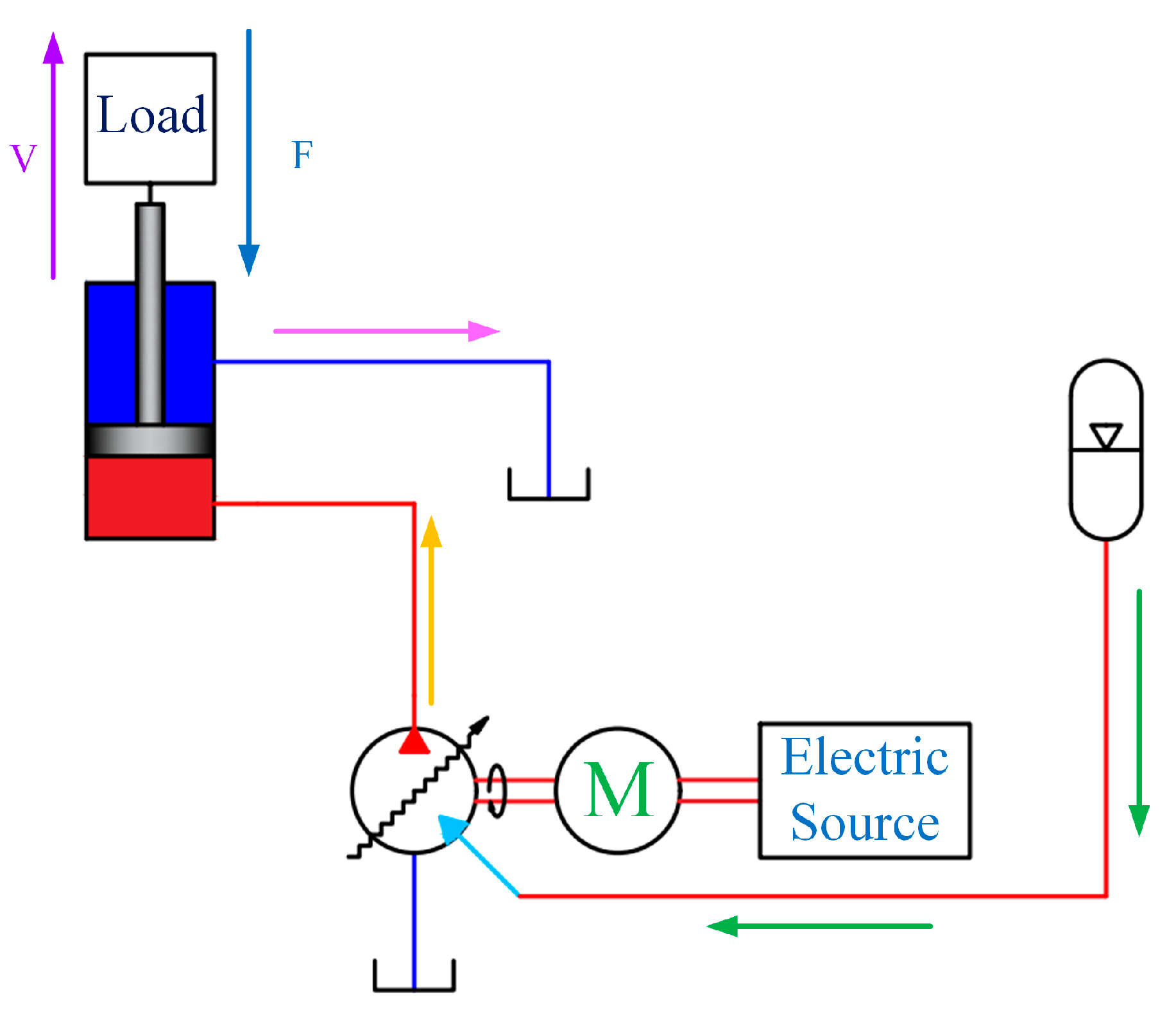
2.2.2. Energy Recovery Mode Operation (ERM)
2.2.3. Direct Reuse Mode Operation (DRM)
3. Mathematical Modeling of ERDRS
3.1. Boom Cylinder Energy Characteristics
3.2. Hydraulic Cylinder Characteristics
3.3. Working Characteristics of the Digital Pump
3.4. Accumulator Characteristic Change
4. Simulation Modeling and Investigation
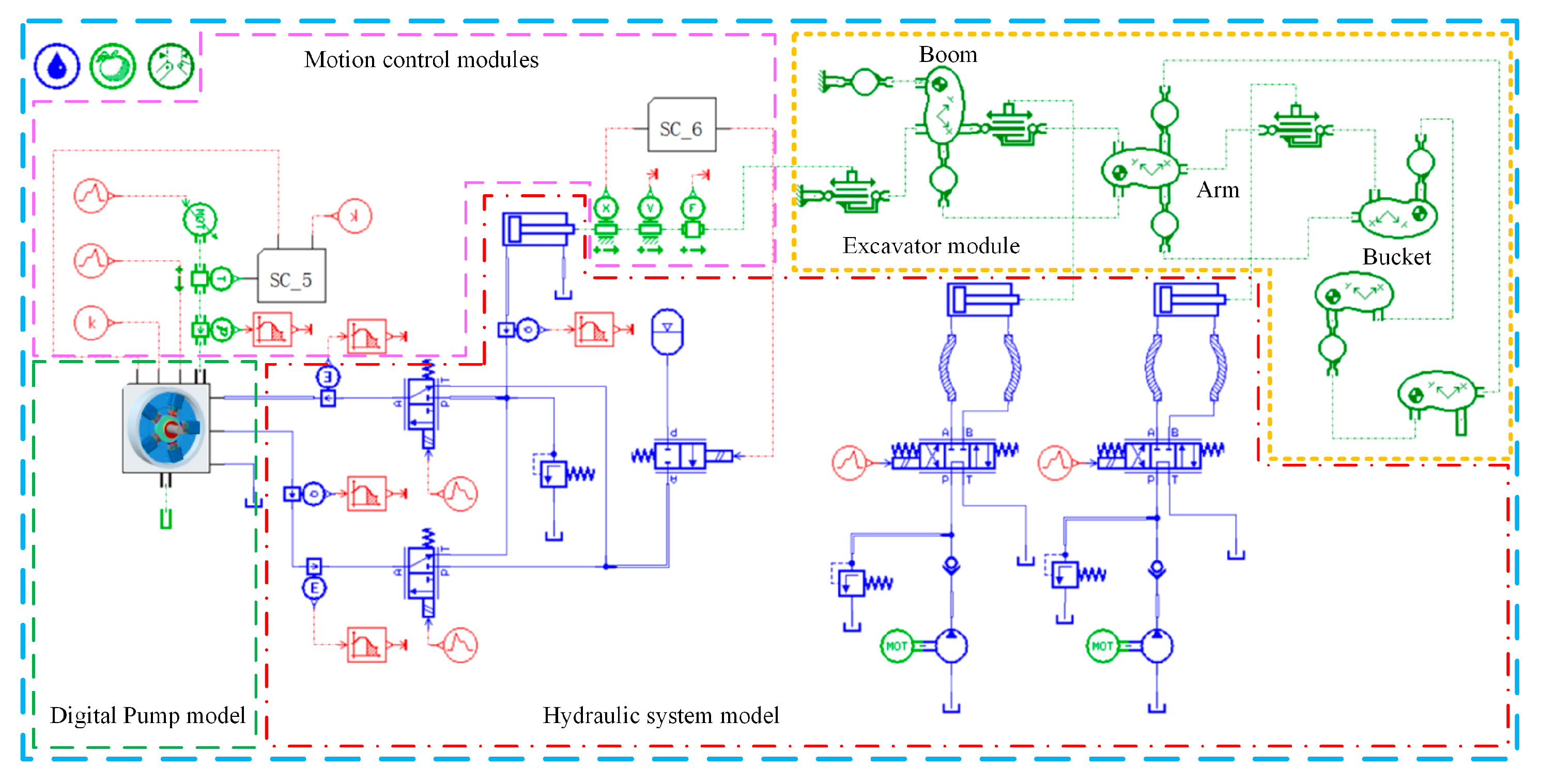
4.1. Simulation Model of ERDRS
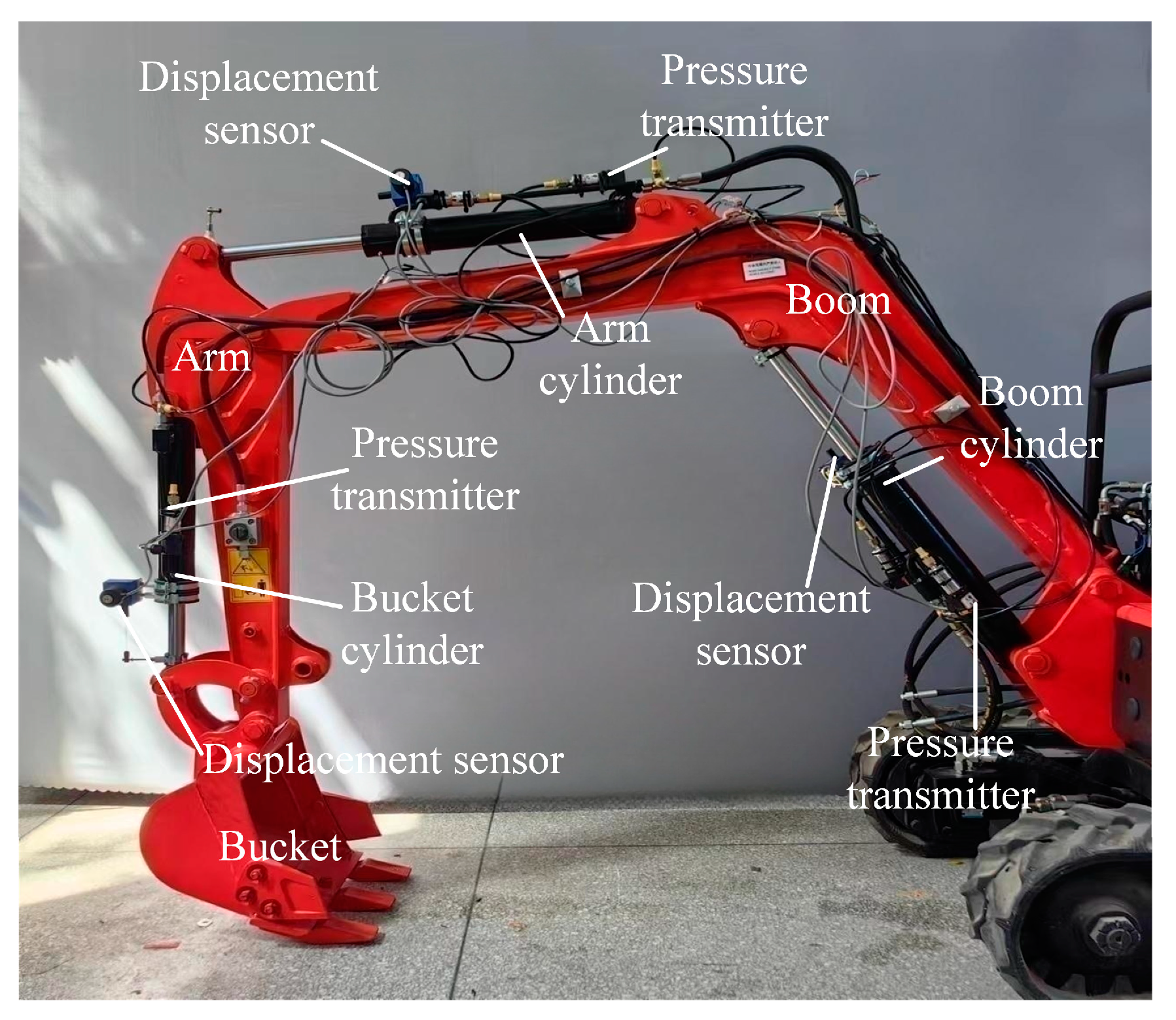
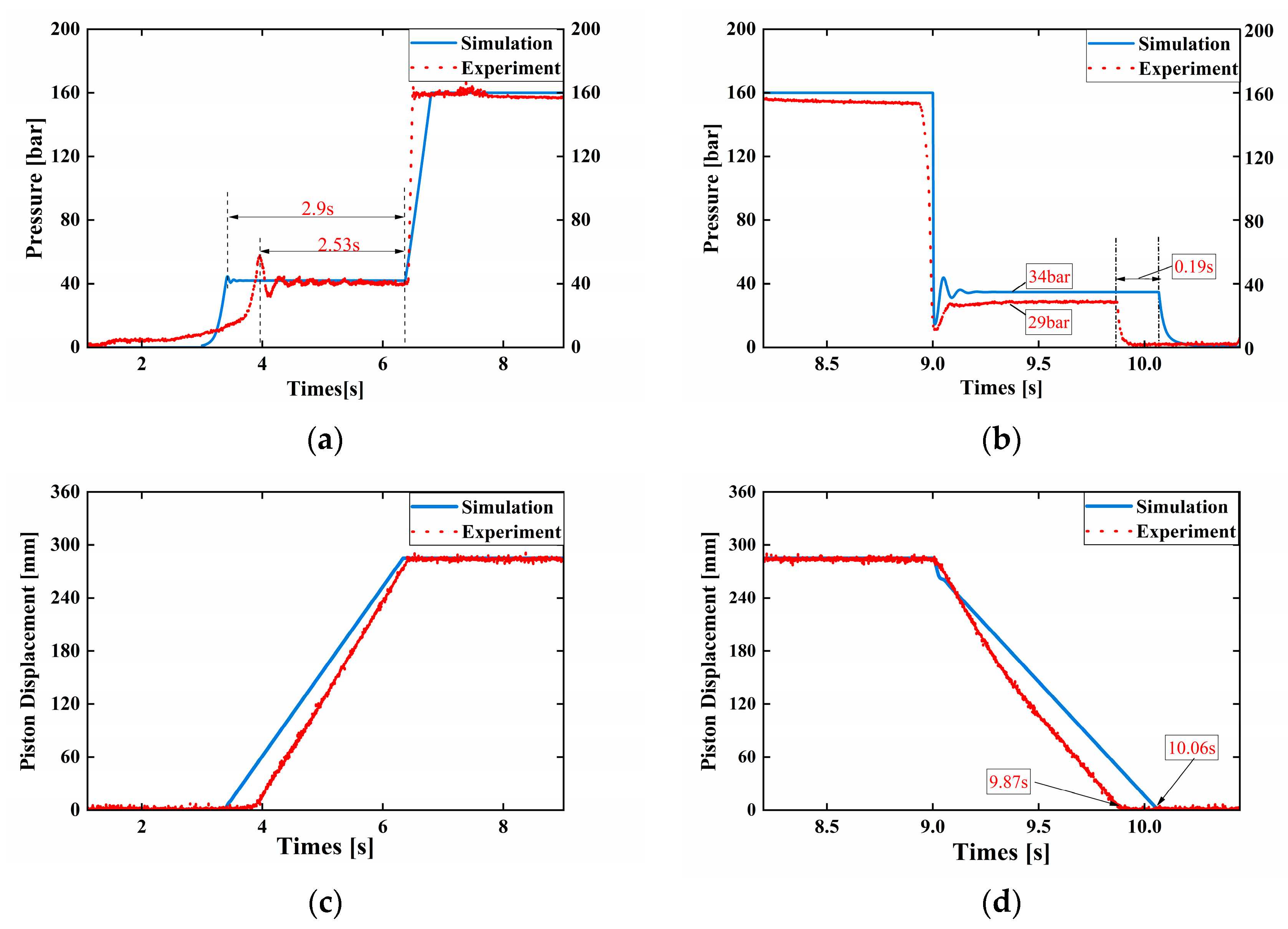
4.2. Model Accuracy Validation
5. Simulation Analysis of the ERDRS under Different Operating Conditions
5.1. No-Load Operation
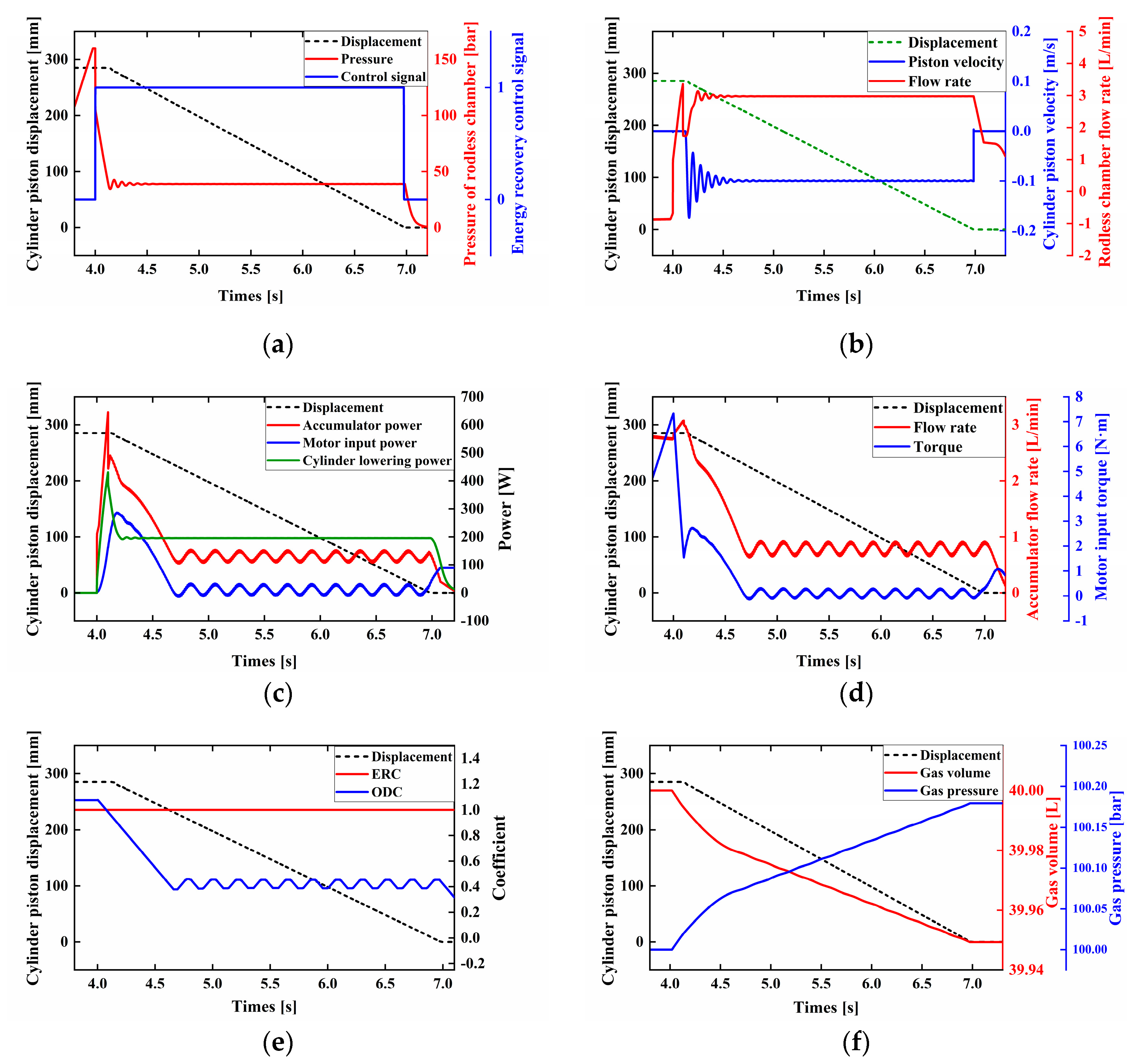
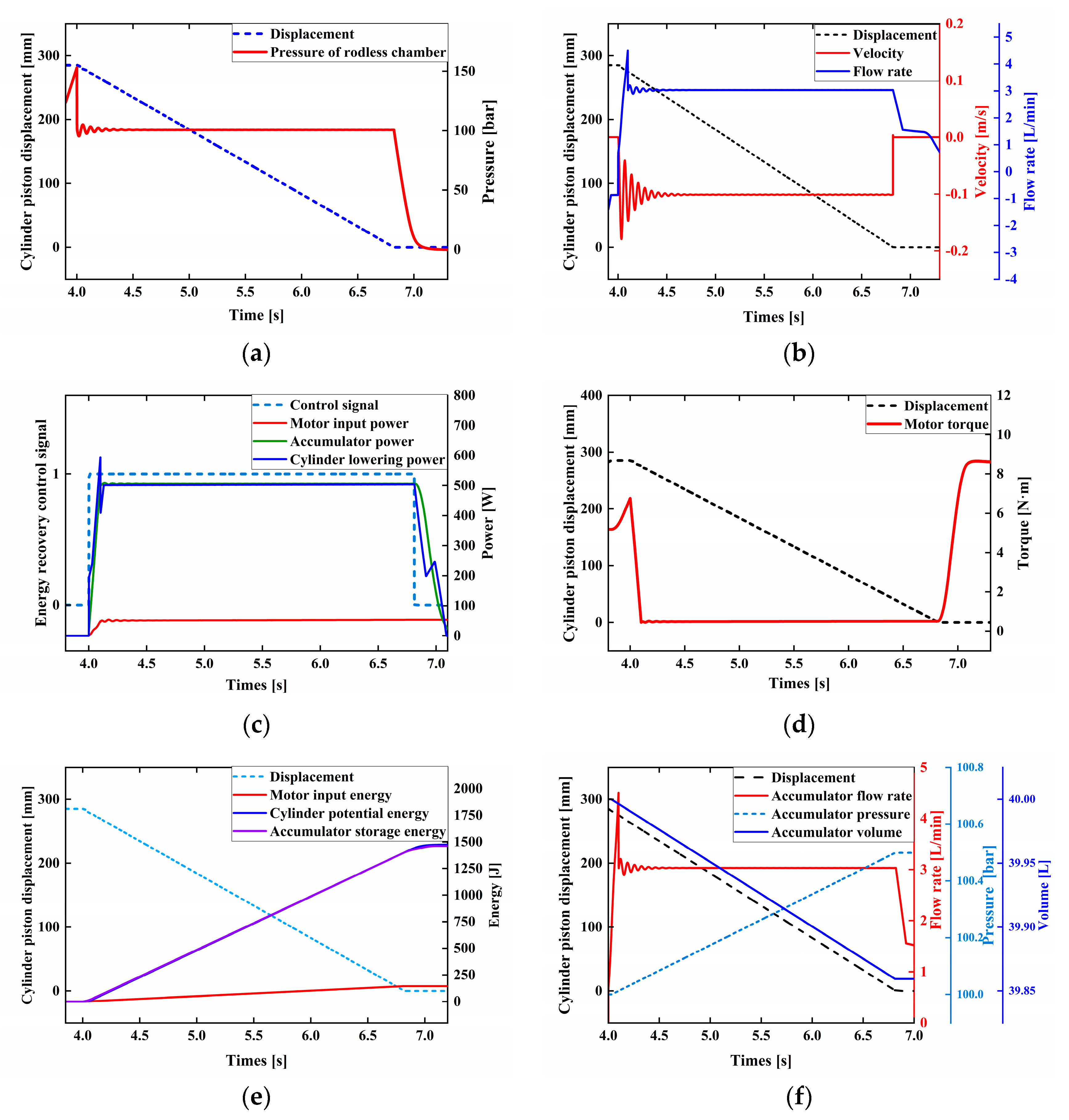
5.1.1. ERM Operating Characteristics
5.1.2. DRM Operation Characteristics
5.2. Full-Load Operation
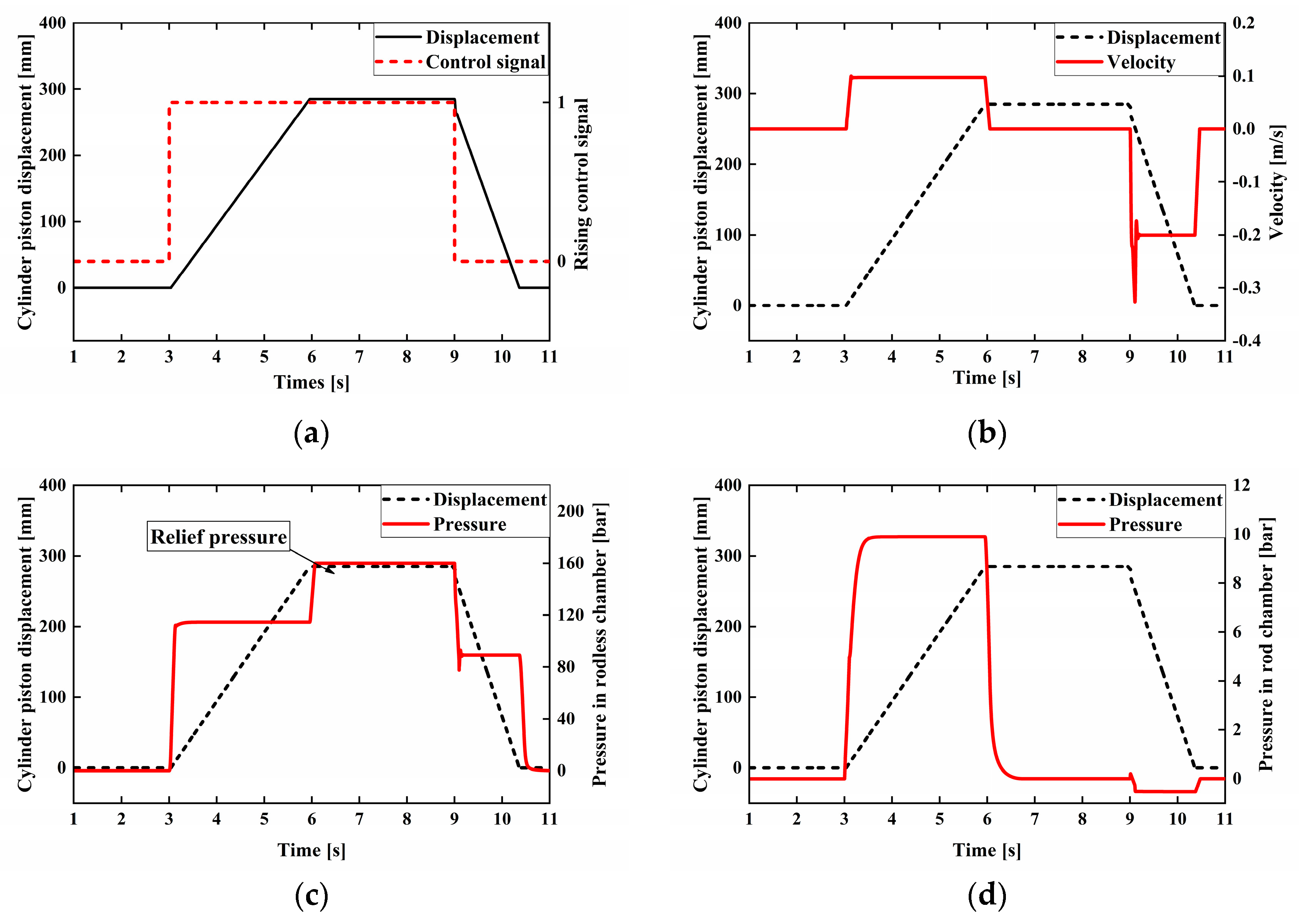
5.2.1. PM Operation Characteristics
5.2.2. ERM Operating Characteristics
5.2.3. DRM Operation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| ERDRS | Energy recovery and direct reuse system |
| SV | Suction valve |
| ERV | Energy recovery valve |
| PM | Pump mode |
| ERM | Energy recovery mode |
| DRM | Direct reuse mode |
| ERC | Energy recovery coefficient |
| ODC | Output displacement coefficient |
References
- Yang, H. Progress and Trend of Construction Machinery Intelligence. Constr. Mach. Technol. Manag. 2017, 30, 19–21. [Google Scholar] [CrossRef]
- Vukovic, M. An Overview of Energy Saving Architectures for Mobile Applications. In Proceedings of the 9th International Fluid Power Conference (9th IFK), Aachen, Germany, 24–26 March 2014. [Google Scholar]
- Lin, Y.; Lin, T.; Chen, Q.; Li, Z.; Fu, S.; Ren, H.; Guo, T. Research Progress on Key Technologies of Electric Construction Machinery. Chin. Hydraul. Pneum. 2021, 45, 1. [Google Scholar]
- Tong, Z.M.; Miao, J.Z.; Li, Y.S.; Tong, S.G.; Zhang, Q.; Tan, G.R. Development of electric construction machinery in China: A review of key technologies and future directions. J. Zhejiang Univ. Sci. A 2021, 22, 245–264. [Google Scholar] [CrossRef]
- Liu, J.-X.; Jiao, Z.-Y.; Wang, Y.; Li, Q.-Y. Research Progress of Energy Regeneration and Utilization System for Hydraulic Excavator. Chin. Hydraul. Pneum. 2018, 5, 81–87. [Google Scholar]
- Yang, L.; Luo, Y.; Luo, Y.; Zhou, S. Analysis of Energy Recovery System of Electric Excavator Boom. Mach. Tool Hydraul. 2023, 51, 141–146. [Google Scholar]
- Li, J.; Zhao, J. Energy recovery for hybrid hydraulic excavators: Flywheel-based solutions. Autom. Constr. 2021, 125, 103648. [Google Scholar] [CrossRef]
- Li, J.; Zhao, J.; Zhang, X. A Novel Energy Recovery System Integrating Flywheel and Flow Regeneration for a Hydraulic Excavator Boom System. Energies 2020, 13, 315. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Cheng, H.; Quan, L.; Hao, Y.-X.; Guan, C. Research on the Electro-hydraulic Energy Recovery and Reuse System in Compound Operation of Pure Electro-hydraulic Excavator. Chin. Hydraul. Pneum. 2020, 12, 44–50. [Google Scholar]
- Lin, T.-L.; Ye, Y.-Y.; Fu, S.-J.; Liu, Q. Energy-saving System of Swing for Hydraulic Excavators Based on Electric Energy Recovery Technology. China J. Highw. Transp. 2014, 27, 120–126. [Google Scholar] [CrossRef]
- Lin, T.-L.; Ye, Y.-Y.; Wang, Q.-F. Electric Energy Recovery System of Hydraulic Excavator Boom. China J. Highw. Transp. 2013, 26, 184–190. [Google Scholar] [CrossRef]
- Liu, C.S.; He, Q.H.; Gong, J. Modeling and experimental research on rotary braking energy recovery system of hybrid excavator. J. Cent. South Univ. 2016, 47, 1533–1542. [Google Scholar]
- Tan, L.; He, X.; Xiao, G.; Jiang, M.; Yuan, Y. Design and energy analysis of novel hydraulic regenerative potential energy systems. Energy 2022, 249, 123780. [Google Scholar] [CrossRef]
- Geng, J.-X.; Xia, L.-P.; Ge, L.; Quan, L.; Zhang, X.-G. Operation and Energy Efficiency Characteristics of Large-scale Mining Hydraulic Excavator Boom. Chin. Hydraul. Pneum. 2022, 46, 108–115. [Google Scholar]
- Hu, P.; Zhu, J.X.; Liu, C.S.; Zhang, D.Q. Characteristics of boom potential energy alternate recovery and utilization system of hydraulic excavator. J. Jilin Univ. 2022, 52, 2256–2264. [Google Scholar] [CrossRef]
- Linjama, M. Digital Fluid Power—State of The Art. In Proceedings of the Twelfth Scandinavian International Conference on Fluid Power, Tampere, Finland, 18–20 May 2011. [Google Scholar]
- Zhang, Q.W.; Kong, X.D.; Yu, B.; Ba, K.X.; Jin, Z.G.; Kang, Y. Review and Development Trend of Digital Hydraulic Technology. Appl. Sci. 2020, 10, 579. [Google Scholar] [CrossRef] [Green Version]
- Danfoss. Data Sheet-Digital Displacement® Pump DDP096 and DPC12; Tomorrow, E., Ed.; Danfoss: Loves Park, IL, USA, 2022; p. 1. [Google Scholar]
- Green, M.; Macpherson, J.; Caldwell, N.; Rampen, W.H.S. DEXTER: The Application of a Digital Displacement® Pump to a 16 Tonne Excavator. In Proceedings of the BATH/ASME 2018 Symposium on Fluid Power and Motion Control, Bath, UK, 12–14 September 2018. [Google Scholar]
- Budden, J.J.; Williamson, C. Danfoss Digital Displacement® Excavator: Test Results and Analysis. In Proceedings of the ASME/BATH 2019 Symposium on Fluid Power and Motion Control, Longboat Key, FL, USA, 7–9 October 2019. [Google Scholar]
- Hutcheson, J.; Abrahams, D.; Macpherson, J.; Caldwell, N.; Rampen, W. Demonstration of Efficient Energy Recovery Systems Using Digital Displacement® Hydraulics. In Proceedings of the BATH/ASME 2020 Symposium on Fluid Power and Motion Control, Virtual, Online, 9–11 September 2020. [Google Scholar]
- Wang, F.; Huang, W.-N.; Quan, L. Valve ports independently control the characteristics of hydraulic excavator rotary brake energy recovery system. J. Chongqing Univ. Technol. (Nat. Sci.) 2022, 36, 126–132. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Pump angular speed | 1000 | rpm |
| The radius of the eccentric | 31 | |
| Piston diameter | 10 | |
| Flow coefficient | 0.7 | |
| Dead volume of piston | 0.08 | |
| Chamber length | 25 | |
| Valve dynamic response | 3 | ms |
| Clearance on diameter | 1.8 × 10−5 | mm |
| Coefficient of viscous friction | 0.5 |
| Parameter | Value | Unit |
|---|---|---|
| Piston diameter | 25 | |
| Rod diameter | 14 | |
| Length of stroke | 285 | |
| Dead volume | 100 | |
| Viscous friction coefficient | 500 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yue, D.; Gao, H.; Liu, Z.; Wei, L.; Liu, Y.; Zuo, X. Potential Energy Recovery and Direct Reuse System of Hydraulic Hybrid Excavators Based on the Digital Pump. Energies 2023, 16, 5229. https://doi.org/10.3390/en16135229
Yue D, Gao H, Liu Z, Wei L, Liu Y, Zuo X. Potential Energy Recovery and Direct Reuse System of Hydraulic Hybrid Excavators Based on the Digital Pump. Energies. 2023; 16(13):5229. https://doi.org/10.3390/en16135229
Chicago/Turabian StyleYue, Daling, Hongfei Gao, Zengguang Liu, Liejiang Wei, Yinshui Liu, and Xiukun Zuo. 2023. "Potential Energy Recovery and Direct Reuse System of Hydraulic Hybrid Excavators Based on the Digital Pump" Energies 16, no. 13: 5229. https://doi.org/10.3390/en16135229