
Robust Fractional-Order Proportional-Integral Controller Tuning for Load Frequency Control of a Microgrid System with Communication Delay


Abstract
:1. Introduction
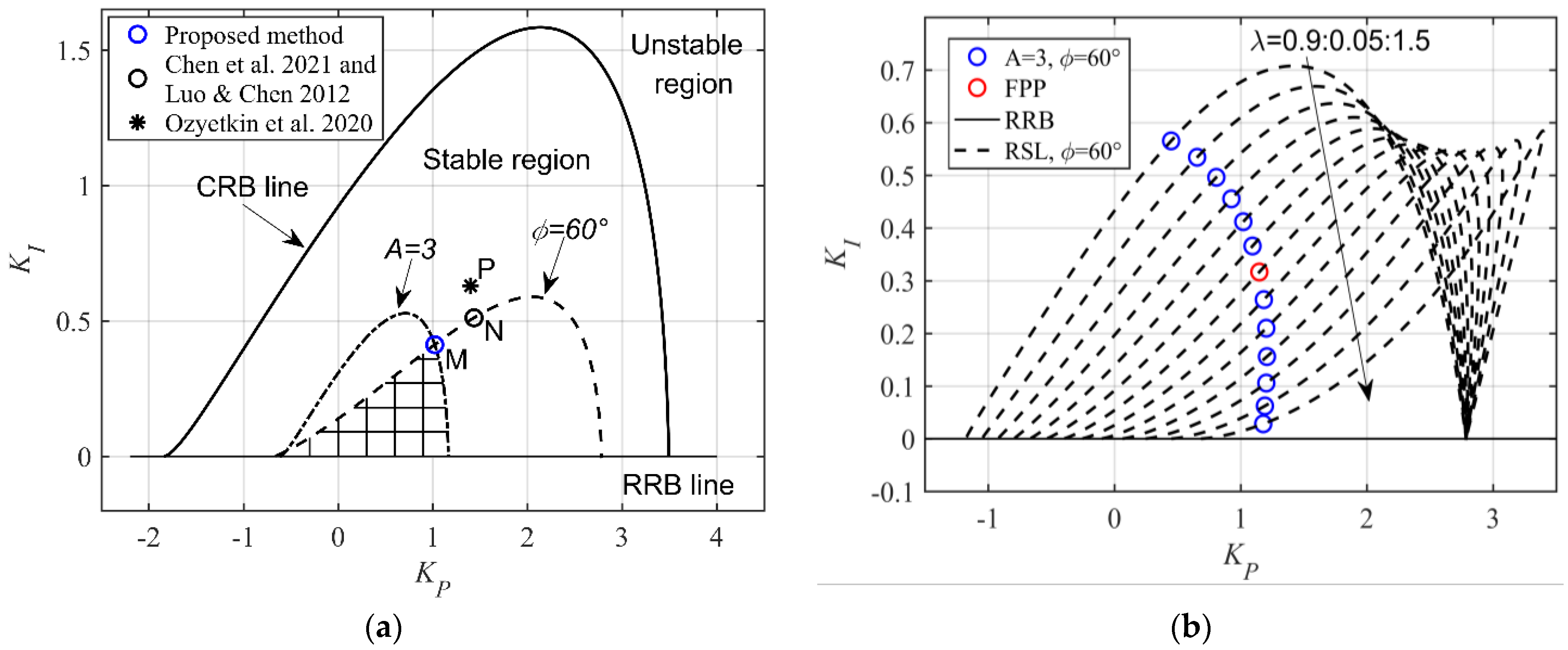
- A novel fractional-order proportional-integral (FOPI) controller tuning method is proposed. The proposed tuning method utilizes the robustness specifications of gain margin (GM), phase margin (PM), and flat phase constraint (FPC), compared with the well-known tuning method [23,24] which utilizes PM, FPC, and gain crossover frequency.
- A fast algorithm for obtaining controller tuning parameters is developed.
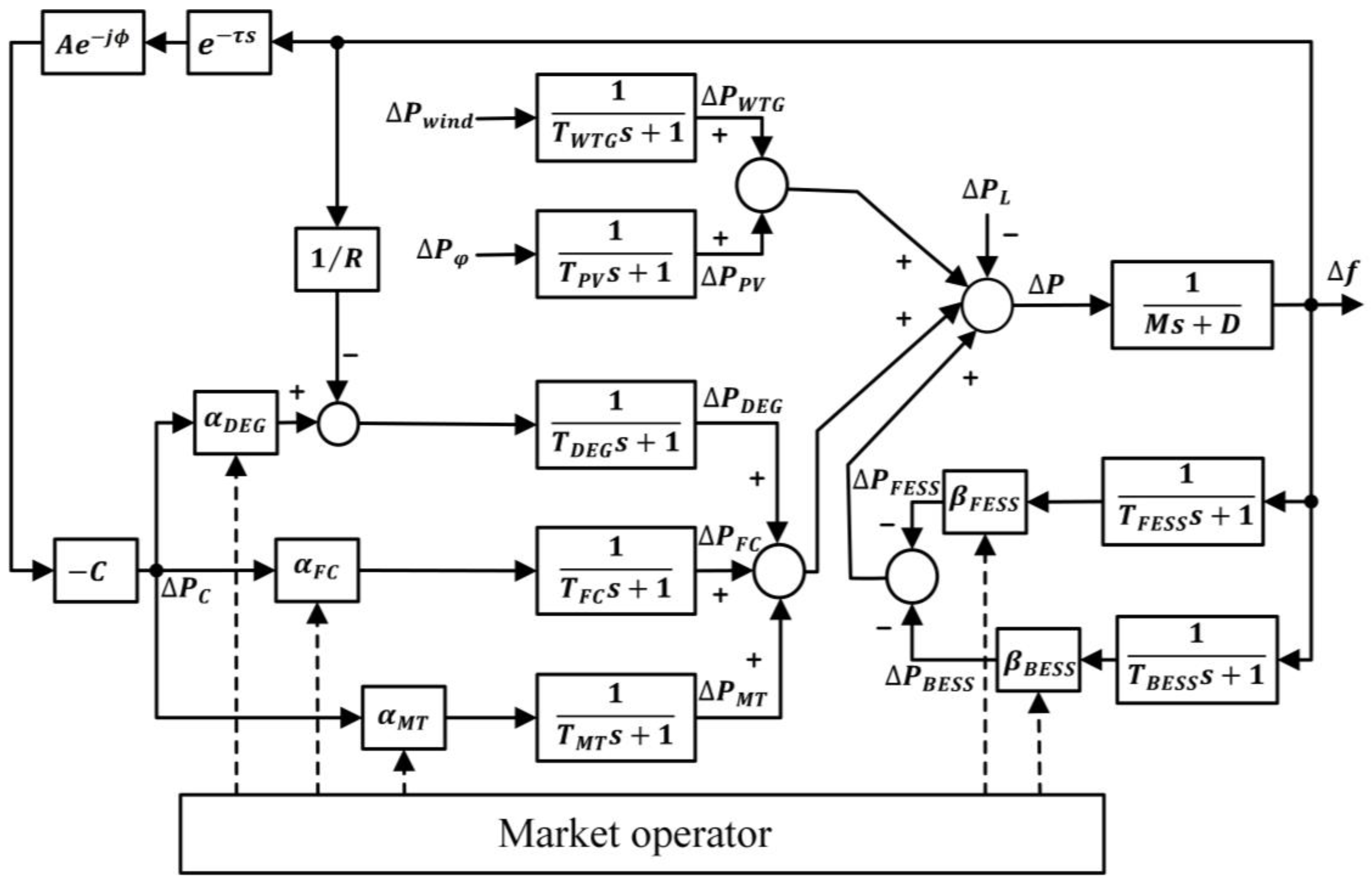
2. Mathematical Modeling of an MG System
3. Load Frequency Controller Design and Tuning
3.1. Load Frequency Controller Design
- RRB. The real root boundary is determined by , which, from (7), gives
- CRB. The complex root boundary is obtained by 0. Inserting and into (7), one obtains
3.2. Tuning of Fractional Order
3.3. Design Summary and Tuning Algorithm
4. Tuning Analysis under Perturbed Model Parameters
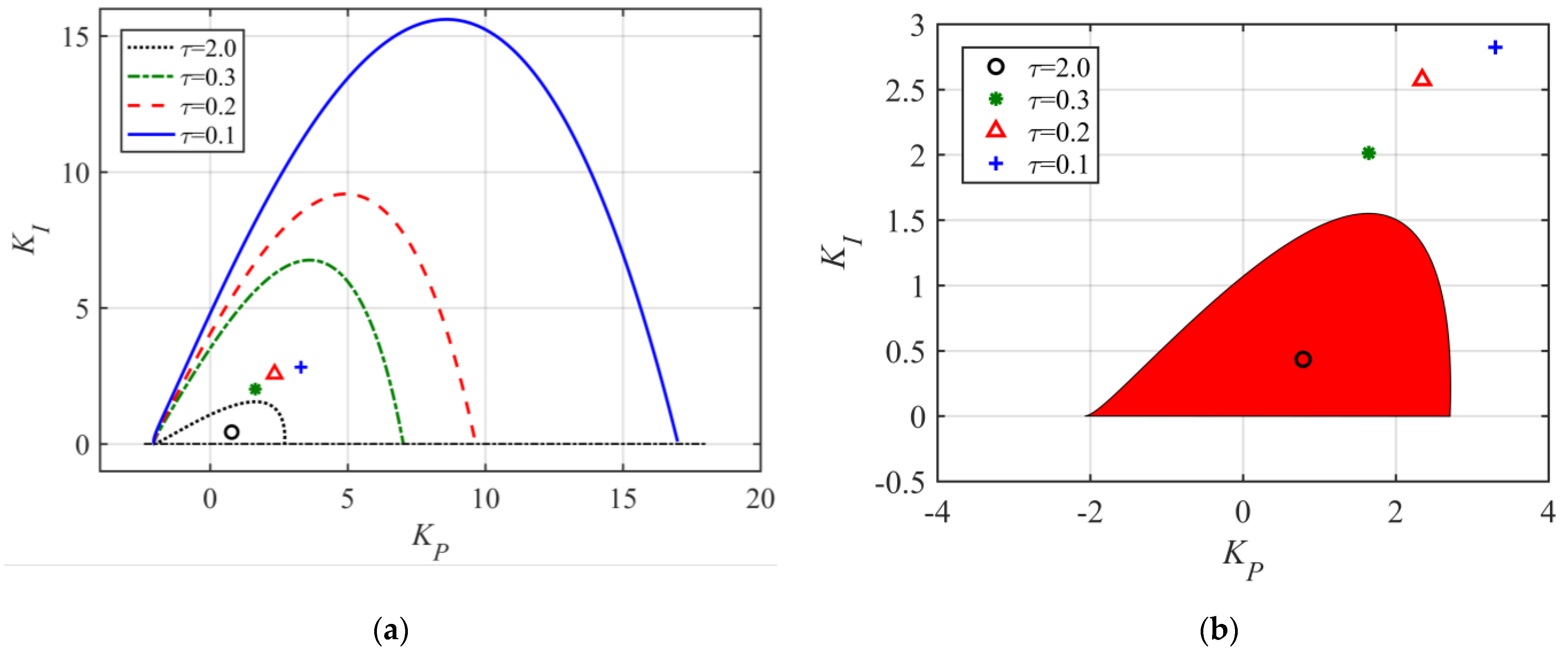
4.1. Controller Tuning under Perturbed Communication Delay
4.2. Controller Tuning under Perturbed Model Gains
5. Simulation Results
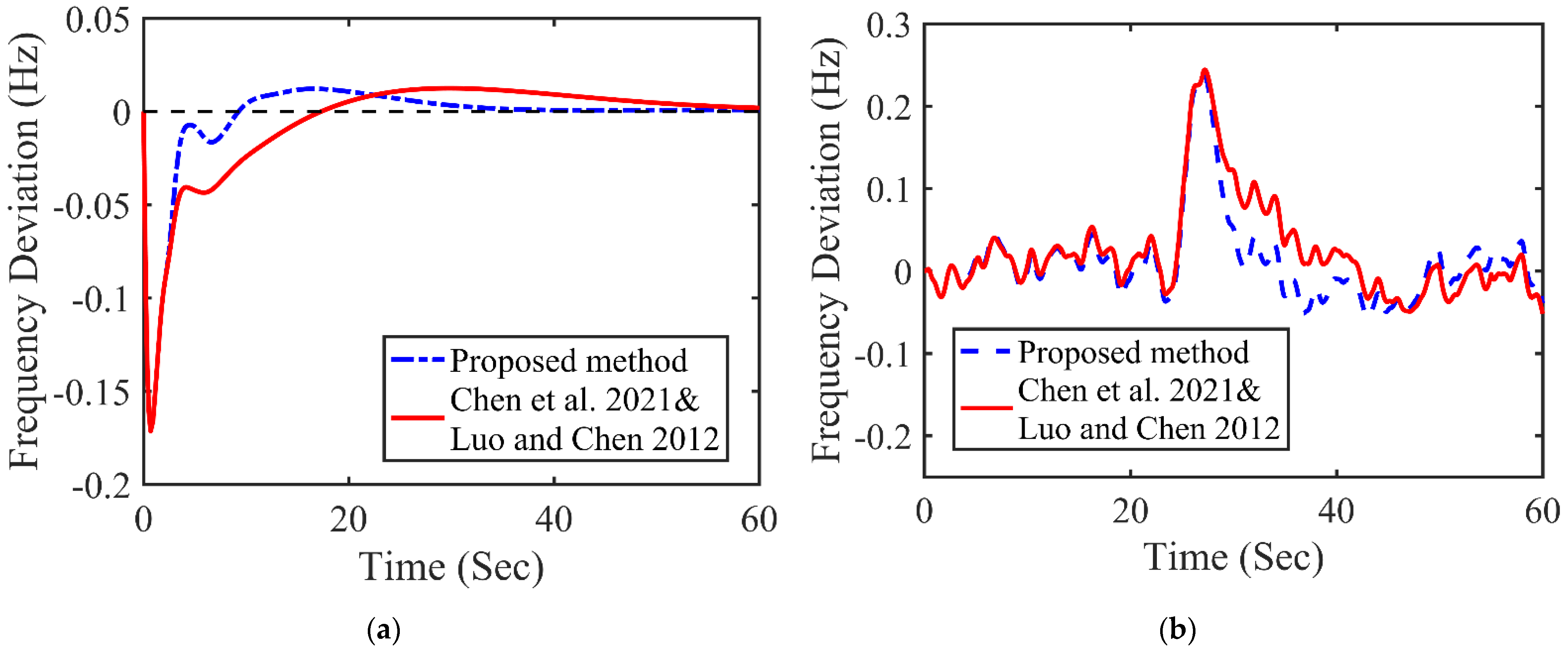
5.1. Comparison with Classical FOPI Tuning Method
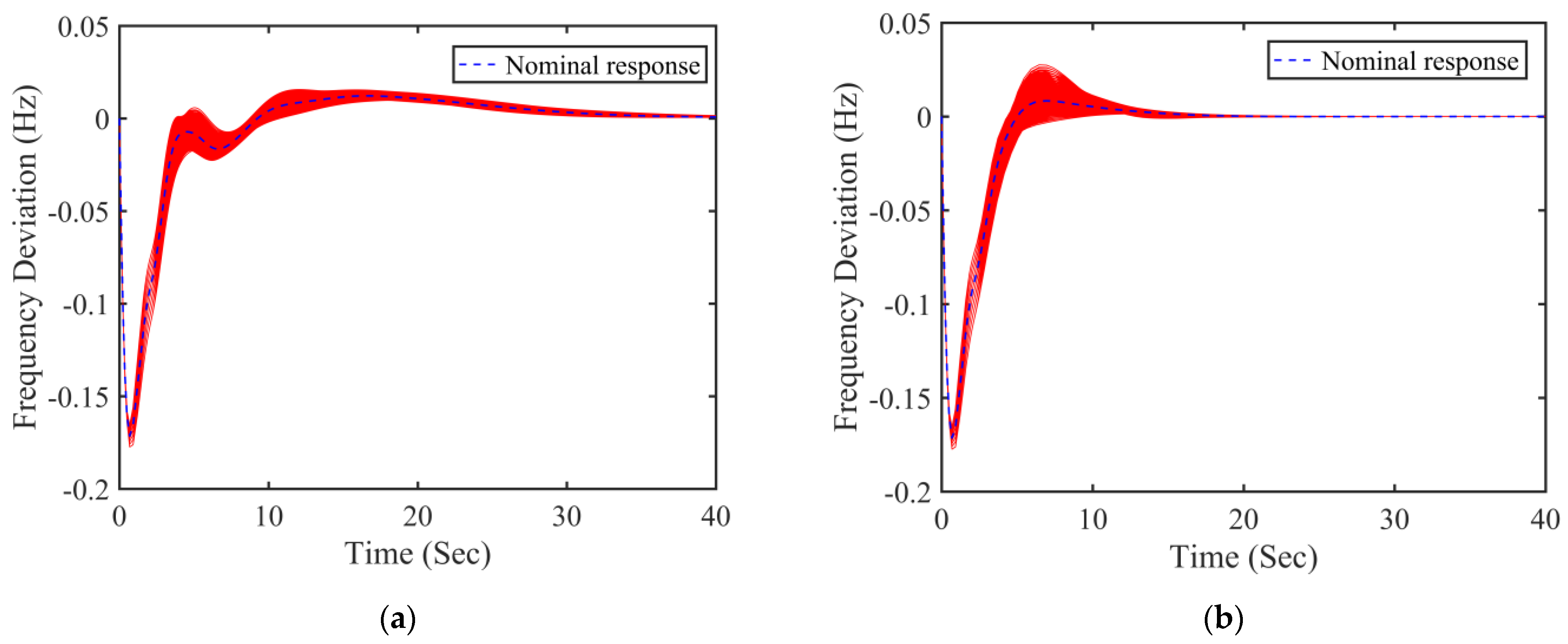
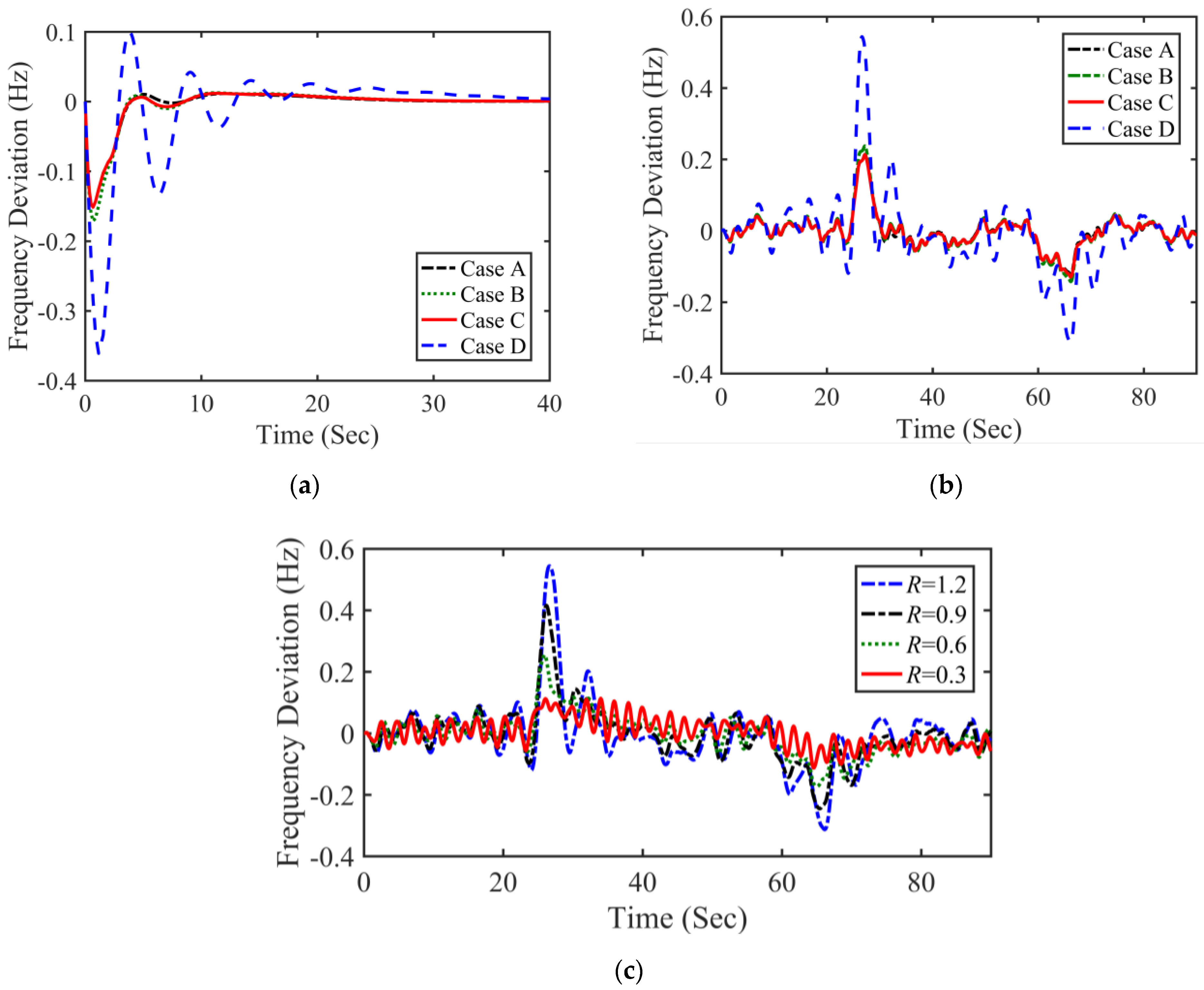
5.2. Influence of Participation Factors
- (1)
- Case A. Only FC participates in secondary frequency control: , , ;
- (2)
- Case B. Uniform coordination of different DER: , , ;
- (3)
- Case C. Both MT and DEG participate in secondary frequency control: , , ;
- (4)
- Case D. Only FC participates in secondary frequency control and both BESS and FESS are switched off: , , .
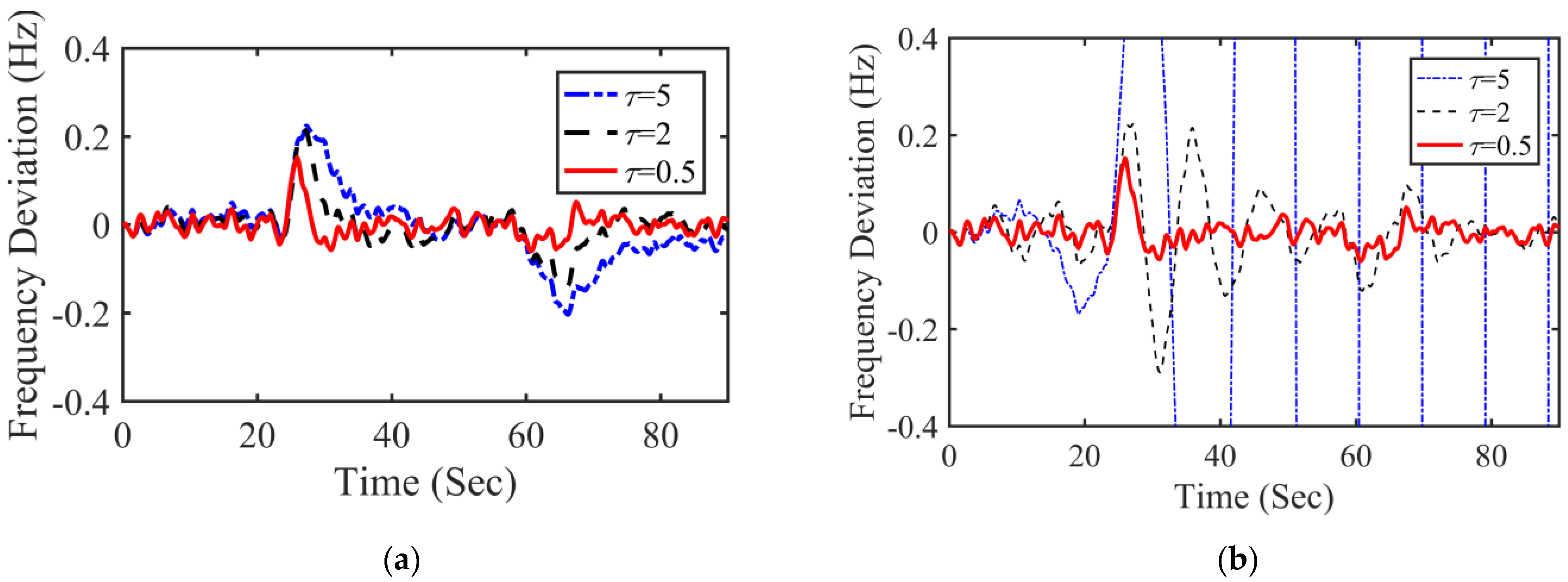
5.3. Influence of Communication Delay
6. Conclusions
Funding
Conflicts of Interest
Nomenclature
| LFC | Load frequency control | Frequency deviation | |
| PV | Photovoltaic | FC gain and time constant | |
| FC | Fuel cell | MT gain and time constant | |
| WTG | Wind turbine generator | DEG gain and time constant | |
| MT | Micro turbine | Real-power unbalance | |
| FESS | Flywheel energy storage system | Load disturbance | |
| DEG | Diesel engine generator | MT output power change | |
| BESS | Battery energy storage system | DEG output power change | |
| DEG participation factor | FESS output power change | ||
| FC participation factor | BESS output power change | ||
| MT participation factor | FC output power change | ||
| BESS participation factor | Per unit | ||
| FESS participation factor | PV and WTG output power changes | ||
| Droop coefficient | PI | Proportional-integral | |
| MG | Microgrid | FOPI | Fractional-order PI |
| Inertia constant | PV and WTG time constants | ||
| Damping coefficient | FESS and BESS time constants | ||
| Load frequency controller | RESs | Renewable energy sources | |
| DER | Distributed energy resources | Transfer functions of FESS and BESS | |
| MO | Market operator | Transfer functions of FC, DEG, and MT | |
| ESS | Energy storage systems | Supplementary control action |
References
- Bevrani HFrancois, B.; Ise, T. Microgrid Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Meng, L.; Sanseverino, E.R.; Luna, A.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Microgrid supervisory controllers and energy management systems: A literature review. Renew. Sustain. Energy Rev. 2016, 60, 1263–1273. [Google Scholar] [CrossRef]
- Jirdehi, M.A.; Tabar, V.S.; Ghassemzadeh, S.; Tohidi, S. Different aspects of microgrid management: A comprehensive review. J. Energy Storage 2020, 30, 101457. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust frequency control in an islanded microgrid: H∞ and μ-Synthesis Approaches. IEEE Trans. Smart Grid. 2016, 7, 706–717. [Google Scholar] [CrossRef] [Green Version]
- Katiraei, F.; Iravani, R.; Hatziargyriou, N.; Dimeas, A. Microgrid management. IEEE Power Energy Mag. 2008, 6, 54–65. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical structure of microgrids control system. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Jain, S.; Hote, Y.V. Generalized active disturbance rejection controller design: Application to hybrid microgrid with communication delay. Int. J. Electr. Power Energy Syst. 2021, 132, 107166. [Google Scholar] [CrossRef]
- Yildirim, B.; Khooban, M.H. Enhancing stability region of time-delayed smart power grids by non-integer controllers. Int. J. Energy Res. 2021, 45, 541–553. [Google Scholar] [CrossRef]
- Özdemir, M.T. The effects of the FOPI controller and time delay on stability region of the fuel cell microgrid. Int. J. Hydrogen Energy 2020, 45, 35064–35072. [Google Scholar] [CrossRef]
- Khooban, M.-H.; Dragicevic, T.; Blaabjerg, F.; Delimar, M. Shipboard Microgrids: A Novel Approach to Load Frequency Control. IEEE Trans. Sustain. Energy 2018, 9, 843–852. [Google Scholar] [CrossRef]
- Khooban, M.H.; Gheisarnejad, M. A Novel Deep Reinforcement Learning Controller Based Type-II Fuzzy System: Frequency Regulation in Microgrids. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 5, 689–699. [Google Scholar] [CrossRef]
- Khooban, M.H.; Niknam, T.; Blaabjerg, F.; Dragičević, T. A new load frequency control strategy for micro-grids with considering electrical vehicles. Electr. Power Syst. Res. 2017, 143, 585–598. [Google Scholar] [CrossRef] [Green Version]
- Mandal, R.; Chatterjee, K. Frequency control and sensitivity analysis of an isolated microgrid incorporating fuel cell and diverse distributed energy sources. Int. J. Hydrogen Energy 2020, 45, 13009–13024. [Google Scholar] [CrossRef]
- Khalil, A.; Rajab, Z.; Alfergani, A.; Mohamed, O. The impact of the time delay on the load frequency control system in microgrid with plug-in-electric vehicles. Sustain. Cities Soc. 2017, 35, 365–377. [Google Scholar] [CrossRef]
- Yildirim, B. Advanced controller design based on gain and phase margin for microgrid containing PV/WTG/Fuel cell/Electrolyzer/BESS. Int. J. Hydrogen Energy 2021, 46, 16481–16493. [Google Scholar] [CrossRef]
- Gu, W.; Liu, W.; Wu, Z.; Zhao, B.; Chen, W. Cooperative Control to Enhance the Frequency Stability of Islanded Microgrids with DFIG-SMES. Energies 2013, 6, 3951–3971. [Google Scholar] [CrossRef]
- Yang, J.; Zeng, Z.; Tang, Y.; He, H.; Wu, Y. Load Frequency Control in Isolated Micro-Grids with Electrical Vehicles Based on Multivariable Generalized Predictive Theory. Energies 2015, 8, 2145–2164. [Google Scholar] [CrossRef]
- Sahu, P.C.; Mishra, S.; Prusty, R.C.; Panda, S. Improved-salp swarm optimized type-II fuzzy controller in load frequency control of multi area islanded AC microgrid. Sustain. Energy Grids Netw. 2018, 16, 380–392. [Google Scholar] [CrossRef]
- Khokhar, B.; Dahiya, S.; Parmar, K.S. Load frequency control of a microgrid employing a 2D Sine Logistic map based chaotic sine cosine algorithm. Appl. Soft Comput. 2021, 109, 107564. [Google Scholar] [CrossRef]
- Latif, A.; Chandra Das, D.; Kumar Barik, A.; Ranjan, S. Illustration of demand response supported co-ordinated system performance evaluation of YSGA optimized dual stage PIFOD-(1+PI) controller employed with wind-tidal-biodiesel based independent two-area interconnected microgrid system. IET Renew. Power Gener. 2020, 14, 1074–1086. [Google Scholar] [CrossRef]
- Bošković, M.; Šekara, T.B.; Rapaić, M.R. Novel tuning rules for PIDC and PID load frequency controllers considering robustness and sensitivity to measurement noise. Int. J. Electr. Power Energy Syst. 2020, 114, 105416. [Google Scholar] [CrossRef]
- Sun, L.; Xue, W.; Li, D.; Zhu, H.; Su, Z.G. Quantitative tuning of active disturbance rejection controller for FOPDT model with application to power plant control. IEEE Trans. Ind. Electron. 2022, 69, 805–815. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, Y.Q. Stabilizing and robust fractional order PI controller synthesis for first order plus time delay systems. Automatica 2012, 48, 2159–2167. [Google Scholar] [CrossRef]
- Chen, P.; Luo, Y.; Peng, Y.; Chen, Y. Optimal robust fractional order PIλD controller synthesis for first order plus time delay systems. ISA Trans. 2021, 114, 136–149. [Google Scholar] [CrossRef] [PubMed]
- Sun, L.; Wu, G.; Xue, Y.; Shen, J.; Li, D.; Lee, K.Y. Coordinated Control Strategies for Fuel Cell Power Plant in a Microgrid. IEEE Trans. Energy Convers. 2018, 33, 1–9. [Google Scholar] [CrossRef]
- Rafiee, A.; Batmani, Y.; Ahmadi, F.; Bevrani, H. Robust Load-Frequency Control in Islanded Microgrids: Virtual Synchronous Generator Concept and Quantitative Feedback Theory. IEEE Trans. Power Syst. 2021, 36, 5408–5416. [Google Scholar] [CrossRef]
- Bevrani, H.; Golpîra, H.; Messina, A.R.; Hatziargyriou, N.; Milano, F.; Ise, T. Power system frequency control: An updated review of current solutions and new challenges. Electr. Power Syst. Res. 2021, 194, 107114. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control, 2nd ed.; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Hwang, C.; Cheng, Y.-C. A numerical algorithm for stability testing of fractional delay systems. Automatica 2006, 42, 825–831. [Google Scholar] [CrossRef]
- Ozyetkin, M.M.; Onat, C.; Tan, N. PI-PD controller design for time delay systems via the weighted geometrical center method. Asian J. Control 2020, 22, 1811–1826. [Google Scholar] [CrossRef]
- Laboratory NRE. Wind Data. Available online: https://www.nrel.gov/grid/eastern-wind-data.html (accessed on 16 March 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.2 | 1, 0.1 | ||
| 0.012 | 1, 0.1 | ||
| 1, 4 | 1.5 | ||
| 1, 2 | 1.8 | ||
| 1, 2 | 1.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruan, S. Robust Fractional-Order Proportional-Integral Controller Tuning for Load Frequency Control of a Microgrid System with Communication Delay. Energies 2023, 16, 5418. https://doi.org/10.3390/en16145418
Ruan S. Robust Fractional-Order Proportional-Integral Controller Tuning for Load Frequency Control of a Microgrid System with Communication Delay. Energies. 2023; 16(14):5418. https://doi.org/10.3390/en16145418
Chicago/Turabian StyleRuan, Shitao. 2023. "Robust Fractional-Order Proportional-Integral Controller Tuning for Load Frequency Control of a Microgrid System with Communication Delay" Energies 16, no. 14: 5418. https://doi.org/10.3390/en16145418