
A Comprehensive Review of Flexible Power-Point-Tracking Algorithms for Grid-Connected Photovoltaic Systems

Abstract
:1. Introduction
- The work discusses various challenges associated with tracking the FPP under varying environmental conditions.
- The manuscript provides a detailed classification of the existing FPPT algorithms based on the control parameter used for tracking the CPP.
- The work also carried out a critical review of the various FPPT control strategies highlighting their advantages and potential shortcomings. It also provides potential future scope of work.
2. Challenges
- The main one is to track the CPP at time of intermittency occurrence in grid. The intermittency is commonly called ride-through faults. Ride-through faults can be either voltage sags or frequency deviations. So, the algorithm should be designed to address such types of faults occurring in grid [40,58].
- Furthermore, while designing an algorithm to track the CPP, some parameters, like speed of convergence, tracking efficiency and steady-state oscillations, should be considered for the betterment of performance. Additionally, implementation complexity and cost are also important aspects to keep in mind while designing an algorithm [56,57,58,59].
3. Algorithm Discussion
3.1. Voltage-Based FPPT/CPG Control
3.1.1. DPTS (Dual Perturbation Time-Step-Based Algorithm) [40]
3.1.2. DSSA (Dual Step-Size-Based Algorithm) [42]
3.1.3. V-P&O-A (Voltage Based P&O Algorithm) [43]
3.1.4. ASSA (Adaptive Step-Size-Based Algorithm) [44]
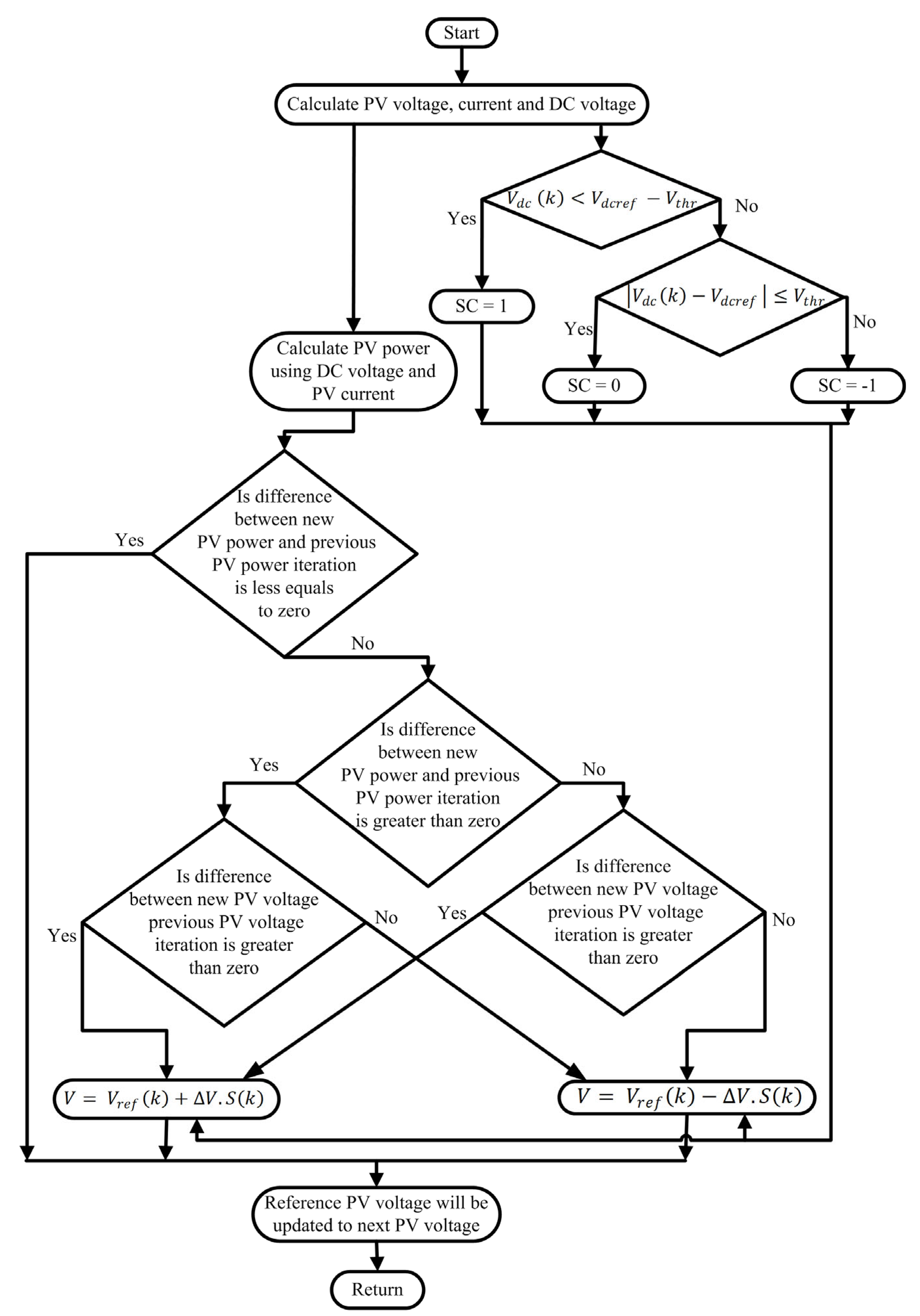
3.1.5. DCVA (DC-Link-Voltage-Based Algorithm) [47]
3.1.6. BSA (Binary Search-Based Algorithm) [48]
3.1.7. VSG-Control-Strategy-Based FPPT Algorithm [54]
3.2. Current-Based FPPT/CPG Control
C-P&O-A (Current-Based P&O Algorithm) [43]
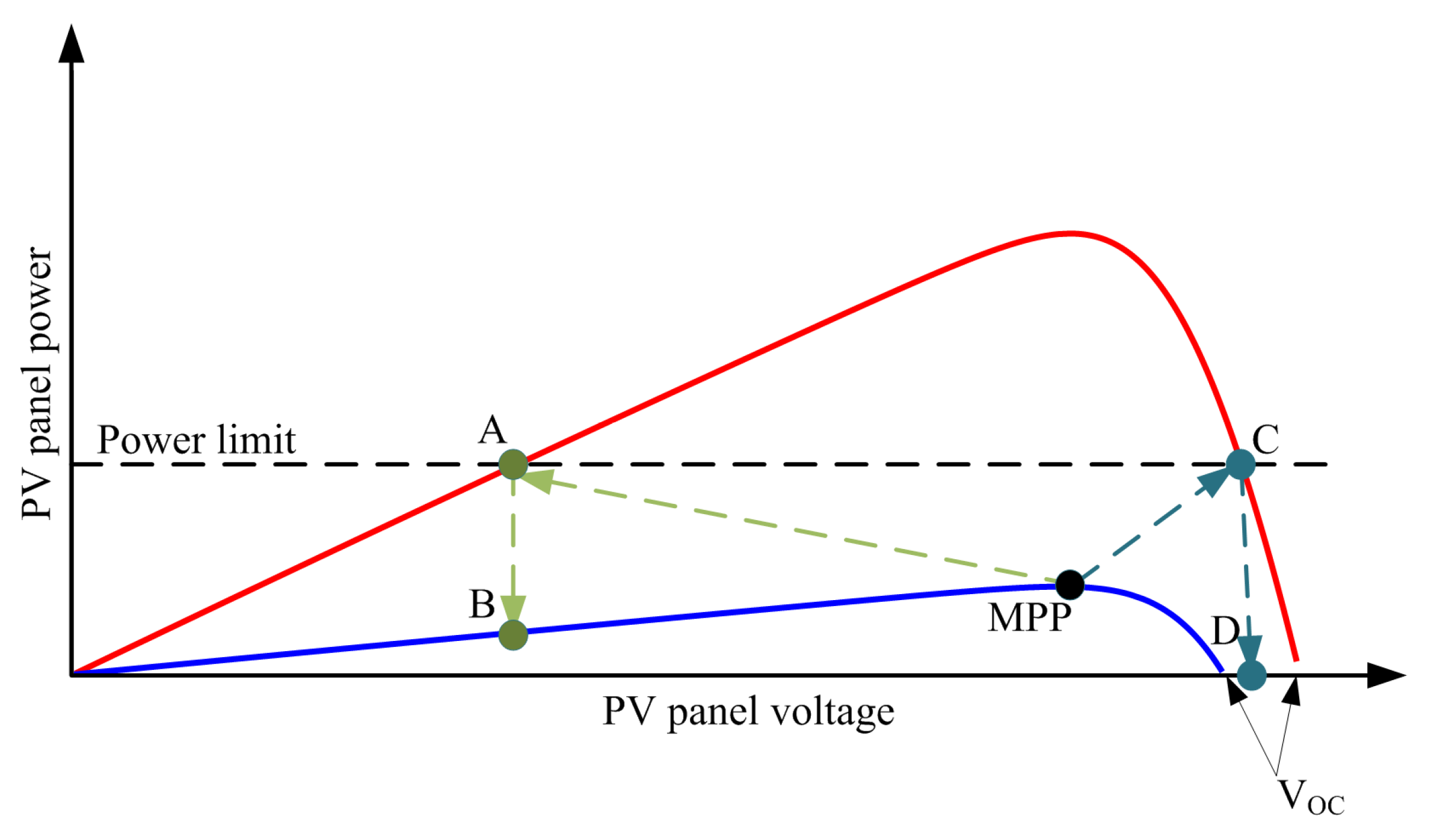
3.3. Power-Based FPPT/CPG Control
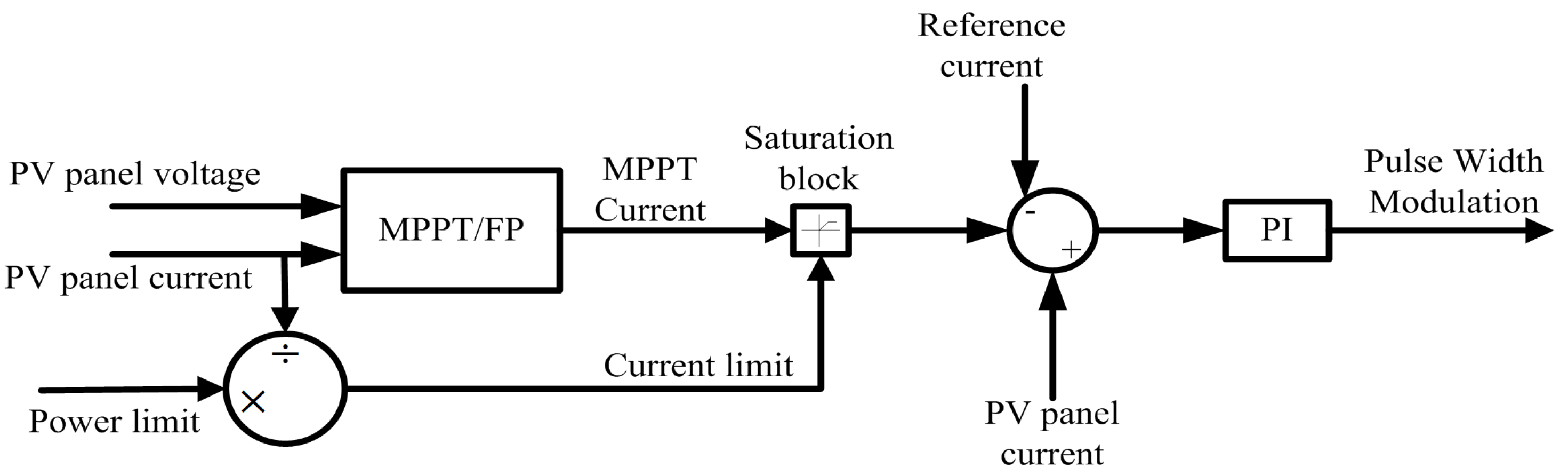
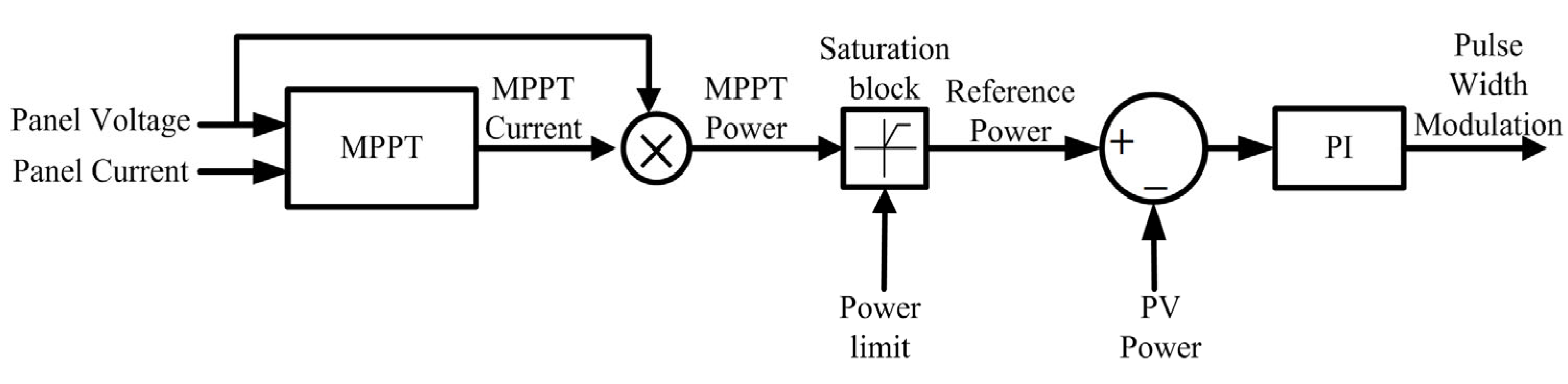
3.3.1. FVSA (Fixed-Voltage Step-Based Algorithm) [38]
3.3.2. PRMA (Power-Reservation-Method-Based Algorithm) [39]
3.3.3. P-P&O-A (Power-Based P&O Algorithm) [43,57]
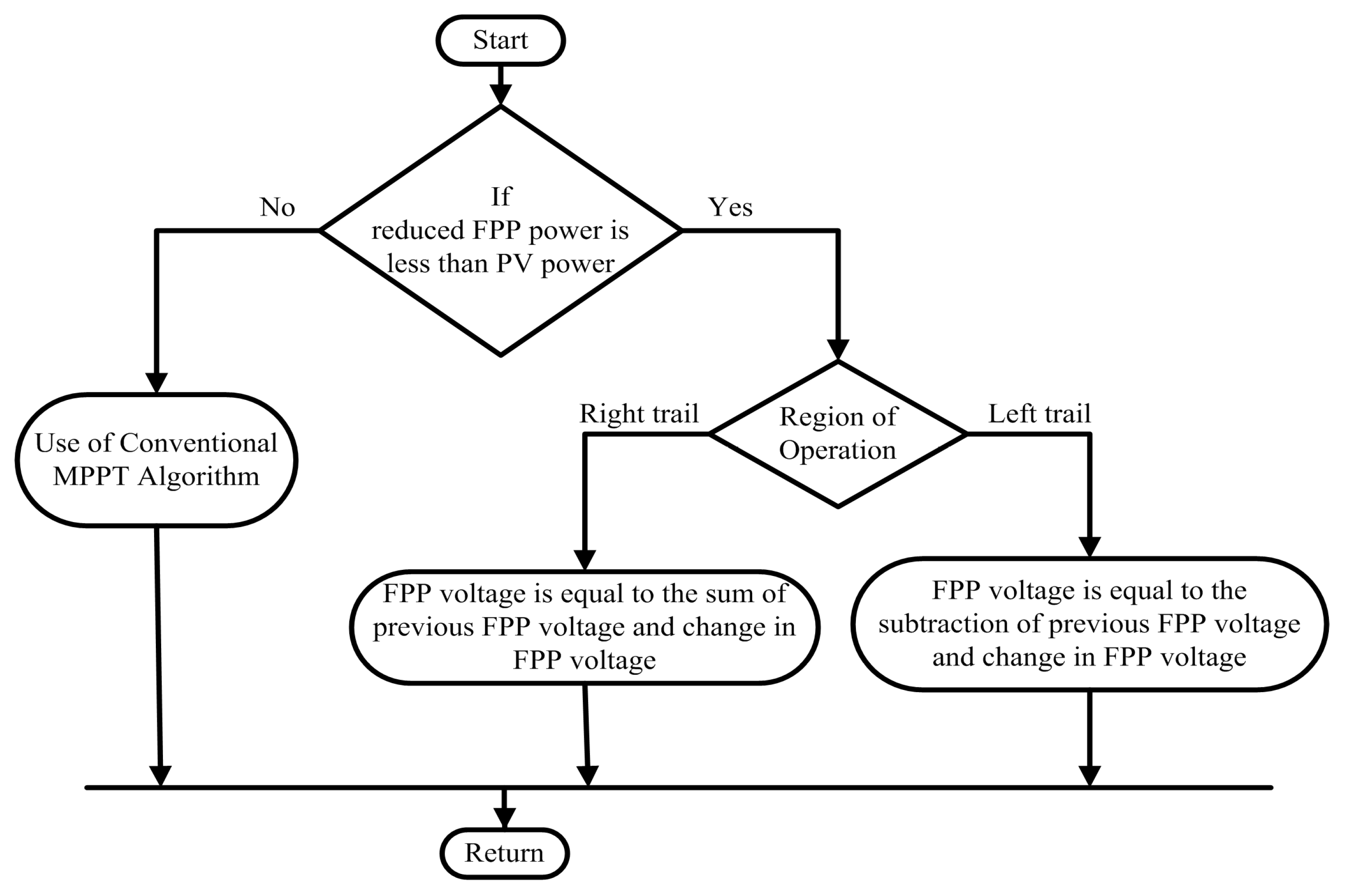
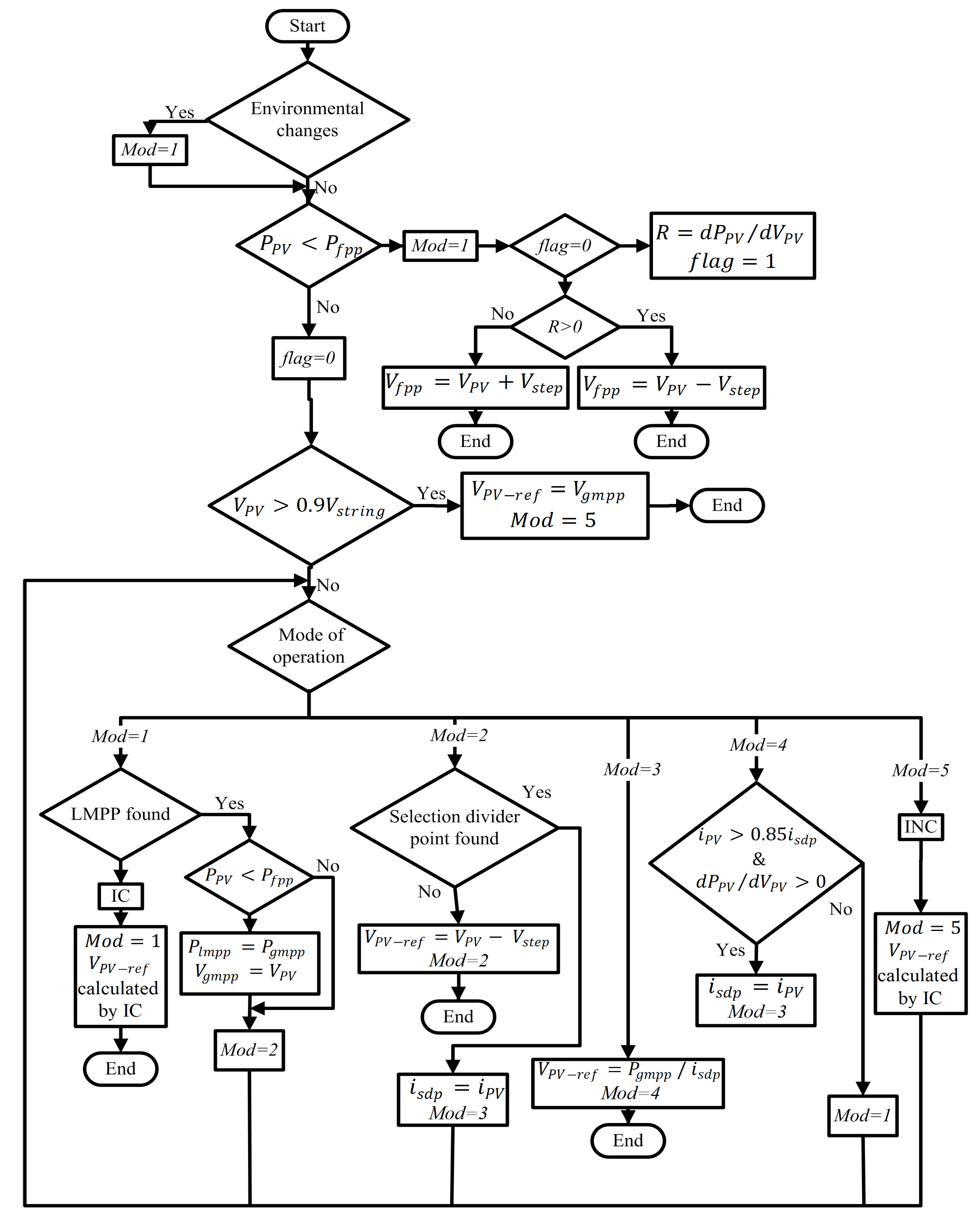
3.3.4. MMPA (Multi-Mode Power-Based Algorithm) [46]
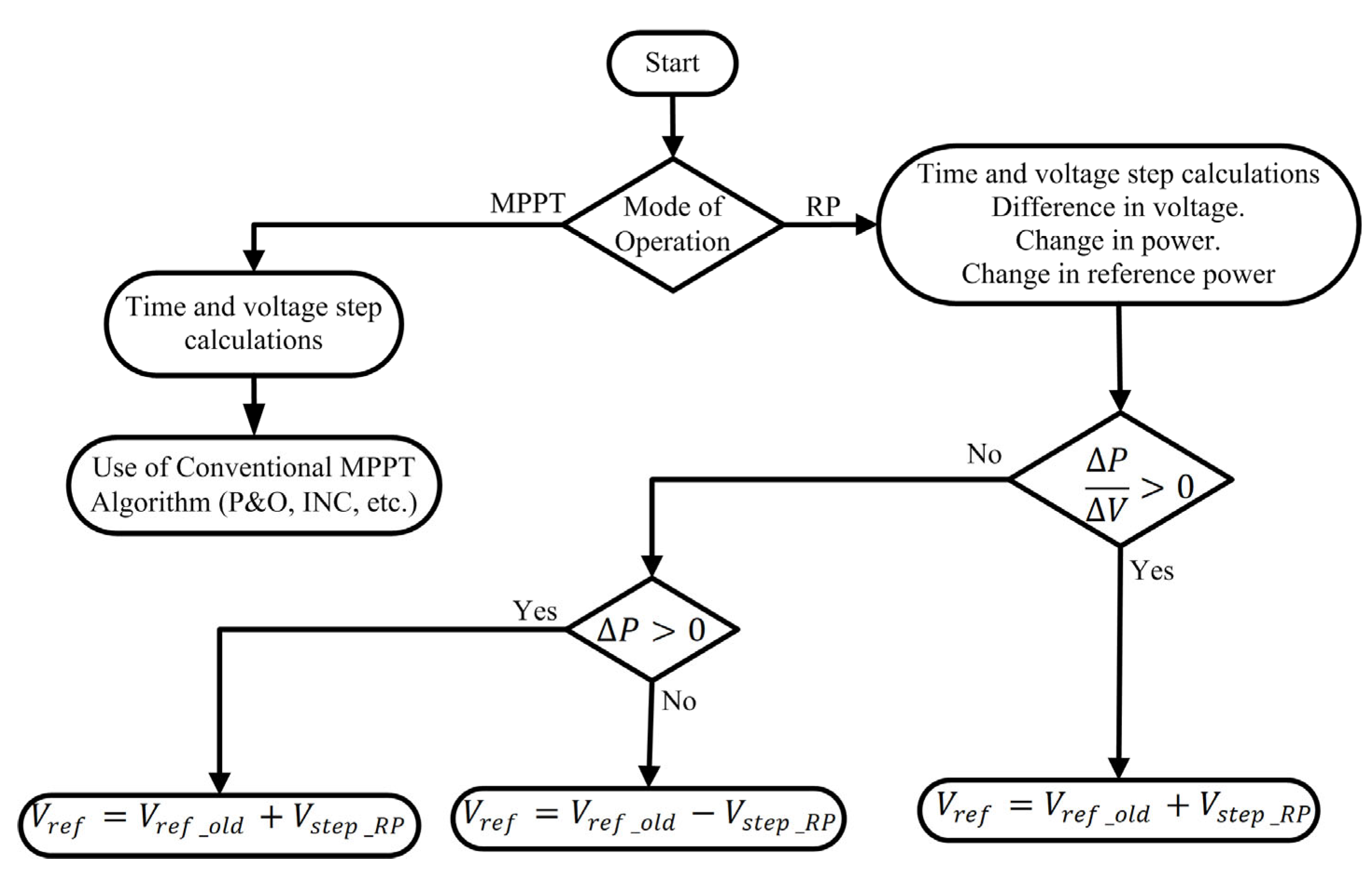
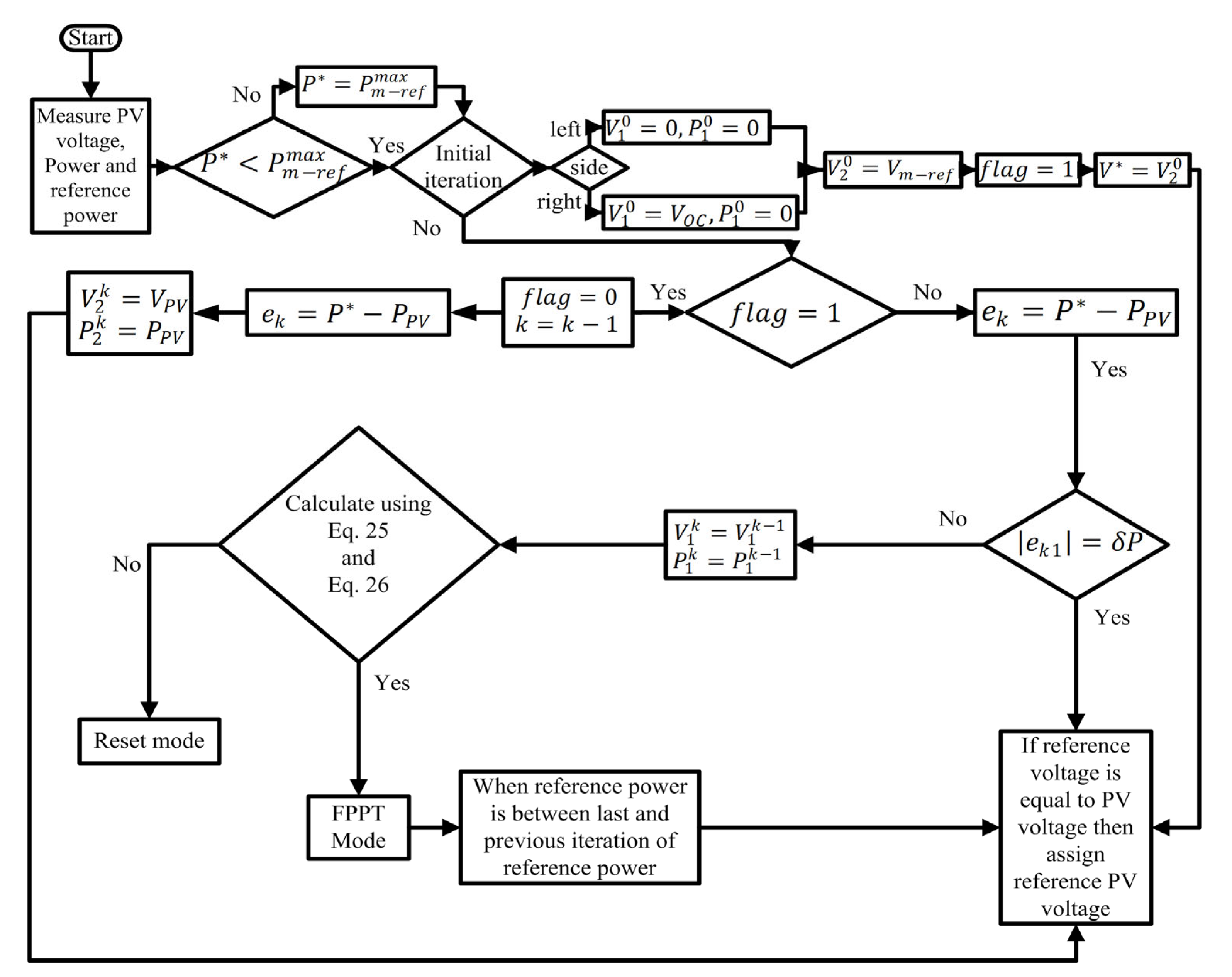
3.3.5. SMA (Secant-Method-Based Algorithm) [49]
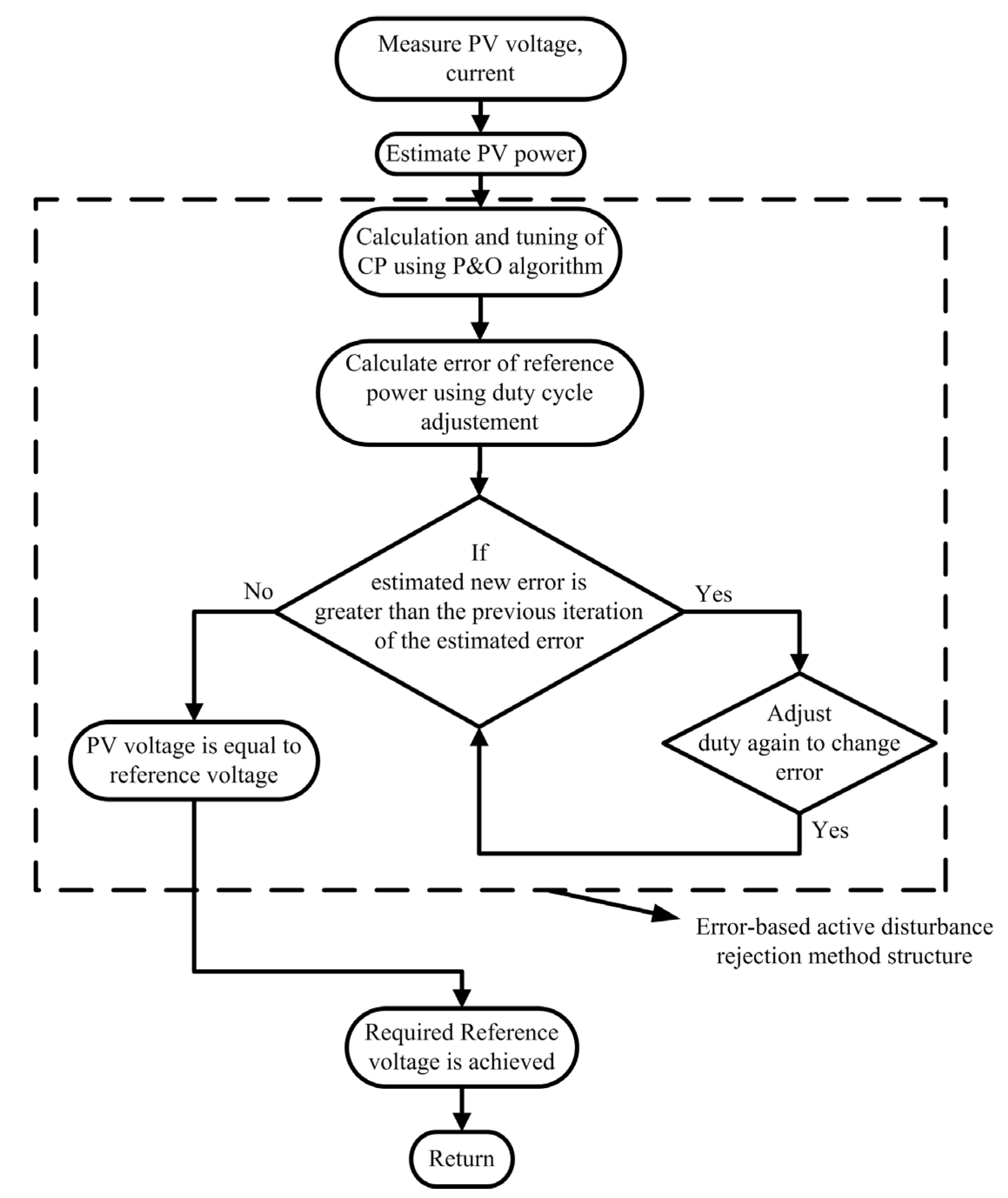
3.3.6. EADRA (Error-Based Active Disturbance Rejection Algorithm) [50]
3.3.7. HC&PSO-A (HC- and PSO-Based Algorithm) [51]
3.3.8. NGA-PSC (Novel Global Algorithm under Partial Shading Conditions) [53]
3.3.9. MA (Model-Based Algorithm) [55]
4. Comparative Analysis
5. Conclusions and Future Scope of Work
- Existing adaptive FPPT algorithms use two distinct step-sizes, and the scope is available to develop a generalized FPPT algorithm that rapidly tracks the FPP with low steady-state oscillations by appropriately selecting a perturbation step-size and adaptively varying it for an improved tracking performance.
- Until now, most of the work is completed by making use of conventional algorithms with a little bit of modification. However, further considerations can be performed with a scope of novelty in the control strategies for the enhancement of the tracking efficiency and for the reduction in oscillations.
- In the literature, only a few of the works have considered the drift severity issue, and its solution has not been explored much. So, a thorough addressing of the drift severity is an area requiring further studies, especially in a case of multiple PV arrays.
- It has already been concluded that the above-discussed algorithms are implemented and tested using conventional algorithms under ideal environmental conditions, like changing irradiance patterns and temperature. But still there is room to explore control strategies in such a way that can work under partial shading scenarios.
- Furthermore, from the application point of view, improvements in the above-discussed techniques can be suggested to make grid-forming (GFM) converters and PV inverters suitable for seamless switching between MPPT and FPPT solutions to deal with low-voltage ride-through (LVRT) conditions occurring in grid-tied PV systems.
Author Contributions
Funding
Data Availability Statement
Acknowledgments

Conflicts of Interest
Abbreviations
| CPG: Constant power generation | MPC: Model predictive control |
| CPS: Constant power source | MPP: Maximum power point |
| CPP: Constant power point | MPPT: Maximum power point tracking |
| FPPT: Flexible power point tracking | P&O: Perturb and observe |
| FPP: Flexible power point | PSC: Partial shading conditions |
| GMP: Global maximum power | PV: Photovoltaics |
| INC: Incremental conductance | PWM: Pulse width modulation |
| INR: Incremental resistance | STC: Standard test conditions |
| G: Irradiance | : Load demand power |
| GFM: Grid-forming converters | //: Maximum PV panel power |
| : Differential of reference power | : Acting MPP power for particular value of irradiance and temperature. |
| : Threshold power | : Real power at |
| : Error (in each iteration) | : Operation boundary of reference power |
| : PV panel current | RP: Reduced power |
| : Short-circuit current density of the PV panel | : State of charge |
| : Power reference | : Symbol of coefficient |
| : Power at FPP | : Acting voltage for the particular value of irradiance and temperature |
| T: Temperature | : Open circuit voltage of the PV panel |
| : Time step between different operating points | : PV panel voltage |
| / : Voltage reference | : Voltage step between different operating point |
| : DC bus voltage |
References
- Talha, M.; Raihan, S.R.S.; Rahim, N.A.; Akhtar, M.N.; Butt, O.M.; Hussain, M.M. Multi-Functional PV Inverter with Low Voltage Ride-Through and Constant Power Output. IEEE Access 2022, 10, 29567–29588. [Google Scholar] [CrossRef]
- Parlevliet, D.; Moheimani, N.R. Efficient conversion of solar energy to biomass and electricity. Aquat. Biosyst. 2014, 10, 4. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.-C.; Liu, Y.-H.; Chen, J.-H.; Luo, Y.-F. A comparative study on maximum power point tracking techniques for photovoltaic generation systems operating under fast changing environments. Sol. Energy 2015, 119, 261–276. [Google Scholar] [CrossRef]
- Peng, B.-R.; Ho, K.-C.; Liu, Y.-H. A Novel and Fast MPPT Method Suitable for Both Fast Changing and Partially Shaded Conditions. IEEE Trans. Ind. Electron. 2017, 65, 3240–3251. [Google Scholar] [CrossRef]
- Du, Y.; Li, X.; Wen, H.; Xiao, W. Perturbation optimization of maximum power point tracking of photovoltaic power systems based on practical solar irradiance data. In Proceedings of the 2015 IEEE 16th Workshop on Control and Modeling for Power Electronics (COMPEL), Vancouver, BC, Canada, 12–15 July 2015; pp. 1–5. [Google Scholar]
- Ahmed, J.; Salam, Z. A Modified P&O Maximum Power Point Tracking Method with Reduced Steady-State Oscillation and Improved Tracking Efficiency. IEEE Trans. Sustain. Energy 2016, 7, 1506–1515. [Google Scholar]
- Ahmed, J.; Salam, Z. An Enhanced Adaptive P&O MPPT for Fast and Efficient Tracking under Varying Environmental Conditions. IEEE Trans. Sustain. Energy 2018, 9, 1487–1496. [Google Scholar]
- Urtasun, A.; Sanchis, P.; Marroyo, L. Limiting the power generated by a photovoltaic system. In Proceedings of the 2013 10th International Multi-Conference on Systems, Signals & Devices (SSD), Hammamet, Tunisia, 18–21 March 2013; pp. 1–6. [Google Scholar]
- Kouro, S.; Leon, J.I.; Vinnikov, D.; Franquelo, L.G. Grid-Connected Photovoltaic Systems: An Overview of Recent Research and Emerging PV Converter Technology. IEEE Ind. Electron. Mag. 2015, 9, 47–61. [Google Scholar] [CrossRef]
- Batzelis, E.I.; Kampitsis, G.E.; Papathanassiou, S.A. Power Reserves Control for PV Systems with Real-Time MPP Estimation via Curve Fitting. IEEE Trans. Sustain. Energy 2017, 8, 1269–1280. [Google Scholar] [CrossRef]
- Forouzesh, M.; Siwakoti, Y.P.; Gorji, S.A.; Blaabjerg, F.; Lehman, B.J. Step-up DC–DC converters: A comprehensive review of voltage-boosting techniques, topologies, and applications. IEEE Trans. Power Electron. 2017, 32, 9143–9178. [Google Scholar] [CrossRef]
- Mei, Q.; Shan, M.; Liu, L.; Guerrero, J.M. A Novel Improved Variable Step-Size Incremental-Resistance MPPT Method for PV Systems. IEEE Trans. Ind. Electron. 2010, 58, 2427–2434. [Google Scholar] [CrossRef]
- Wang, H.; Shen, J. An Improved Model Combining Evolutionary Algorithm and Neural Networks for PV Maximum Power Point Tracking. IEEE Access 2018, 7, 2823–2827. [Google Scholar] [CrossRef]
- Park, S.M.; Park, S.Y. Power weakening control of the photovoltaic-battery system for seamless energy transfer in microgrids. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 2971–2976. [Google Scholar]
- Tonkoski, R.; Lopes, L.A.C.; El-Fouly, T.H.M. Coordinated Active Power Curtailment of Grid Connected PV Inverters for Overvoltage Prevention. IEEE Trans. Sustain. Energy 2011, 2, 139–147. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of Control and Grid Synchronization for Distributed Power Generation Systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Yang, Y.; Blaabjerg, F.; Zou, Z. Benchmarking of Grid Fault Modes in Single-Phase Grid-Connected Photovoltaic Systems. IEEE Trans. Ind. Appl. 2013, 49, 2167–2176. [Google Scholar] [CrossRef]
- Coster, E.J.; Myrzik, J.M.A.; Kruimer, B.; Kling, W.L. Integration Issues of Distributed Generation in Distribution Grids. Proc. IEEE 2010, 99, 28–39. [Google Scholar] [CrossRef]
- Islam, G.M.S.; Al-Durra, A.; Muyeen, S.; Tamura, J. Low voltage ride through capability enhancement of grid connected large scale photovoltaic system. In Proceedings of the IECON 2011—37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 884–889. [Google Scholar]
- Rosa, C.; Vinikov, D.; Romero-Cadaval, E.; Pires, V.; Martins, J. Low-power home PV systems with MPPT and PC control modes. In Proceedings of the 2013 International Conference-Workshop Compatibility and Power Electronics, Ljubljana, Slovenia, 5–7 June 2013; pp. 58–62. [Google Scholar]
- Albarracín, R.; Alonso, M. Photovoltaic reactive power limits. In Proceedings of the 2013 12th International Conference on Environment and Electrical Engineering, Wroclaw, Poland, 5–8 May 2013; pp. 13–18. [Google Scholar]
- Li, X.; Wang, Q.; Wen, H.; Xiao, W. Comprehensive Studies on Operational Principles for Maximum Power Point Tracking in Photovoltaic Systems. IEEE Access 2019, 7, 121407–121420. [Google Scholar] [CrossRef]
- Podder, A.K.; Roy, N.K.; Pota, H.R. MPPT methods for solar PV systems: A critical review based on tracking nature. IET Renew. Power Gener. 2019, 13, 1615–1632. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnalte, S.; Burgos, J.; Rodríguez, J. Power limits of grid-connected modern wind energy systems. Renew. Energy 2006, 31, 1455–1470. [Google Scholar] [CrossRef]
- Wandhare, R.G.; Agarwal, V. Precise active and reactive power control of the PV-DGS integrated with weak grid to increase PV penetration. In Proceedings of the 2014 IEEE 40th Photovoltaic Specialist Conference (PVSC), Denver, CO, USA, 8–13 June 2014; pp. 3150–3155. [Google Scholar]
- Jately, V.; Arora, S. Development of a dual-tracking technique for extracting maximum power from PV systems under rapidly changing environmental conditions. Energy 2017, 133, 557–571. [Google Scholar] [CrossRef]
- Zater, M.E.; Adwan, A. Online Gradient Descent for Flexible Power Point Tracking Under a Highly Fluctuating Weather and Load. arXiv 2022, arXiv:2203.00197. [Google Scholar]
- Timbus, A.V.; Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Rodriguez, P. PLL algorithm for power generation systems robust to grid voltage faults. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Republic of Korea, 18–22 June 2006; pp. 1–7. [Google Scholar]
- Grid-Connected PV Systems: Design and Installation; Global Sustainable Energy Solutions Pvt. Limited: New Delhi, India, 2013.
- Craciun, B.-I.; Kerekes, T.; Sera, D.; Teodorescu, R. Frequency Support Functions in Large PV Power Plants with Active Power Reserves. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 849–858. [Google Scholar] [CrossRef]
- Tang, C.Y.; Chen, Y.T.; Chen, Y.M. PV Power System with Multi-Mode Operation and Low-Voltage Ride-Through Capability. IEEE Trans. Ind. Electron. 2015, 12, 7524–7533. [Google Scholar] [CrossRef]
- Tafti, H.D.; Maswood, A.I.; Konstantinou, G.; Pou, J.; Kandasamy, K.; Lim, Z.; Ooi, G.H. Low-voltage ride-thorough capability of photovoltaic grid-connected neutral-point-clamped inverters with active/reactive power injection. IET Renew. Power Gener. 2017, 11, 1182–1190. [Google Scholar] [CrossRef]
- Yang, Y.; Koutroulis, E.; Sangwongwanich, A.; Blaabjerg, F. Pursuing Photovoltaic Cost-Effectiveness: Absolute Active Power Control Offers Hope in Single-Phase PV Systems. IEEE Ind. Appl. Mag. 2017, 23, 40–49. [Google Scholar] [CrossRef]
- Mirhosseini, M.; Pou, J.; Karanayil, B.; Agelidis, V.G. Resonant Versus Conventional Controllers in Grid-Connected Photovoltaic Power Plants Under Unbalanced Grid Voltages. IEEE Trans. Sustain. Energy 2016, 7, 1124–1132. [Google Scholar] [CrossRef]
- Kakimoto, N.; Takayama, S.; Satoh, H.; Nakamura, K. Power Modulation of Photovoltaic Generator for Frequency Control of Power System. IEEE Trans. Energy Convers. 2009, 24, 943–949. [Google Scholar] [CrossRef]
- Mirhosseini, M.; Pou, J.; Agelidis, V.G. Single- and Two-Stage Inverter-Based Grid-Connected Photovoltaic Power Plants with Ride-Through Capability Under Grid Faults. IEEE Trans. Sustain. Energy 2014, 6, 1150–1159. [Google Scholar] [CrossRef]
- Sangwongwanich, A.; Yang, Y.; Blaabjerg, F. High-Performance Constant Power Generation in Grid-Connected PV Systems. IEEE Trans. Power Electron. 2015, 31, 1822–1825. [Google Scholar] [CrossRef]
- Tafti, H.D.; Maswood, A.I.; Pou, J.; Konstantinou, G.; Agelidis, V.G. An algorithm for reduction of extracted power from photovoltaic strings in grid-tied photovoltaic power plants during voltage sags. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 3018–3023. [Google Scholar]
- Sangwongwanich, A.; Yang, Y.; Blaabjerg, F. A Sensorless Power Reserve Control Strategy for Two-Stage Grid-Connected PV Systems. IEEE Trans. Power Electron. 2017, 32, 8559–8569. [Google Scholar] [CrossRef]
- Tafti, H.D.; Maswood, A.I.; Konstantinou, G.; Pou, J.; Blaabjerg, F. A General Constant Power Generation Algorithm for Photovoltaic Systems. IEEE Trans. Power Electron. 2017, 33, 4088–4101. [Google Scholar] [CrossRef]
- Sangwongwanich, A.; Yang, Y.; Blaabjerg, F.; Sera, D. Delta Power Control Strategy for Multistring Grid-Connected PV Inverters. IEEE Trans. Ind. Appl. 2017, 53, 3862–3870. [Google Scholar] [CrossRef]
- Tafti, H.D.; Sangwongwanich, A.; Yang, Y.; Konstantinou, G.; Pou, J.; Blaabjerg, F. A general algorithm for flexible active power control of photovoltaic systems. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 1115–1121. [Google Scholar]
- Sangwongwanich, A.; Yang, Y.; Blaabjerg, F.; Wang, H. Benchmarking of Constant Power Generation Strategies for Single-Phase Grid-Connected Photovoltaic Systems. IEEE Trans. Ind. Appl. 2018, 54, 447–457. [Google Scholar] [CrossRef]
- Tafti, H.D.; Sangwongwanich, A.; Yang, Y.; Pou, J.; Konstantinou, G.; Blaabjerg, F. An Adaptive Control Scheme for Flexible Power Point Tracking in Photovoltaic Systems. IEEE Trans. Power Electron. 2018, 34, 5451–5463. [Google Scholar] [CrossRef]
- Narang, A.; Tafti, H.D.; Townsend, C.D.; Farivar, G.; Pou, J.; Konstantinou, G.; Vazquez, S. An Algorithm for Fast Flexible Power Point Tracking in Photovoltaic Power Plants. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 4387–4392. [Google Scholar]
- Tafti, H.D.; Townsend, C.D.; Konstantinou, G.; Pou, J. A Multi-Mode Flexible Power Point Tracking Algorithm for Photovoltaic Power Plants. IEEE Trans. Power Electron. 2019, 34, 5038–5042. [Google Scholar] [CrossRef]
- Yan, H.W.; Narang, A.; Tafti, H.D.; Farivar, G.G.; Pou, J. Reduced battery usage in a hybrid battery and photovoltaic stand-alone DC microgrid with flexible power point tracking. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 3894–3899. [Google Scholar]
- Gomez-Merchan, R.; Vazquez, S.; Alcaide, A.M.; Tafti, H.D.; Leon, J.I.; Pou, J.; Rojas, C.A.; Kouro, S.; Franquelo, L.G. Binary Search Based Flexible Power Point Tracking Algorithm for Photovoltaic Systems. IEEE Trans. Ind. Electron. 2020, 68, 5909–5920. [Google Scholar] [CrossRef]
- Kumaresan, A.; Tafti, H.D.; Kandasamy, N.K.; Farivar, G.G.; Pou, J.; Subbaiyan, T. Flexible Power Point Tracking for Solar Photovoltaic Systems Using Secant Method. IEEE Trans. Power Electron. 2021, 36, 9419–9429. [Google Scholar] [CrossRef]
- Hou, G.; Ke, Y.; Huang, C. A flexible constant power generation scheme for photovoltaic system by error-based active disturbance rejection control and perturb & observe. Energy 2021, 237, 121646. [Google Scholar]
- Xie, Z.; Wu, Z. A flexible power point tracking algorithm for photovoltaic system under partial shading condition. Sustain. Energy Technol. Assess. 2021, 49, 101747. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, P. Power Quality Improvement for Grid-connected PV System Based on Distribution Static Compensator with Fuzzy Logic Controller and UVT/ADALINE-based Least Mean Square Controller. J. Mod. Power Syst. Clean Energy 2021, 9, 1289–1299. [Google Scholar] [CrossRef]
- Tafti, H.D.; Wang, Q.; Townsend, C.D.; Pou, J.; Konstantinou, G. Global Flexible Power Point Tracking in Photovoltaic Systems Under Partial Shading Conditions. IEEE Trans. Power Electron. 2022, 37, 11332–11341. [Google Scholar] [CrossRef]
- Zhang, B.; Zhao, P.; Zhao, J. Research on control strategy of two-stage photovoltaic virtual synchronous generator with variable power point tracking. Energy Rep. 2022, 8, 283–290. [Google Scholar] [CrossRef]
- Ahmed, M.; Harbi, I.; Kennel, R.; Rodriguez, J.; Abdelrahem, M. Model-Based Maximum Power Point Tracking Algorithm with Constant Power Generation Capability and Fast DC-Link Dynamics for Two-Stage PV Systems. IEEE Access 2022, 10, 48551–48568. [Google Scholar] [CrossRef]
- Tafti, H.D.; Konstantinou, G.; Townsend, C.D.; Farivar, G.G.; Sangwongwanich, A.; Yang, Y.; Pou, J.; Blaabjerg, F. Extended Functionalities of Photovoltaic Systems with Flexible Power Point Tracking: Recent Advances. IEEE Trans. Power Electron. 2020, 35, 9342–9356. [Google Scholar] [CrossRef]
- Tafti, H.D.; Konstantinou, G.; Townsend, C.D.; Farivar, G.G.; Sangwongwanich, A.; Yang, Y.; Pou, J.; Blaabjerg, F. A comparative study of flexible power point tracking algorithms in photovoltaic systems. In Proceedings of the 2019 IEEE 4th International Future Energy Electronics Conference (IFEEC), Singapore, 25–28 November 2019; pp. 1–6. [Google Scholar]
- Tafti, H.D.; Konstantinou, G.; Townsend, C.D.; Farivar, G.G.; Ceballos, S.; Pou, J.; Fletcher, J.E. Comparative Analysis of Flexible Power Point Tracking Algorithms in Photovoltaic Systems. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 110–115. [Google Scholar]
- Ahmed, A.; Ran, L.; Moon, S.; Park, J.-H. A Fast PV Power Tracking Control Algorithm with Reduced Power Mode. IEEE Trans. Energy Convers. 2013, 28, 565–575. [Google Scholar] [CrossRef]
- Li, X.; Wen, H.; Hu, Y.; Jiang, L.; Xiao, W. Modified Beta Algorithm for GMPPT and Partial Shading Detection in Photovoltaic Systems. IEEE Trans. Power Electron. 2017, 33, 2172–2186. [Google Scholar] [CrossRef]
- Danandeh, M.A.; Mousavi, G.S.M. Comparative and comprehensive review of maximum power point tracking methods for PV cells. Renew. Sustain. Energy Rev. 2018, 82, 2743–2767. [Google Scholar] [CrossRef]
- Jiang, L.L.; Srivatsan, R.; Maskell, D.L. Computational intelligence techniques for maximum power point tracking in PV systems: A review. Renew. Sustain. Energy Rev. 2018, 85, 14–45. [Google Scholar] [CrossRef]
- Manickam, C.; Raman, G.P.; Raman, G.R.; Ganesan, S.I.; Chilakapati, N. Fireworks Enriched P&O Algorithm for GMPPT and Detection of Partial Shading in PV Systems. IEEE Trans. Power Electron. 2017, 32, 4432–4443. [Google Scholar]
- Almutairi, A.; Abo-Khalil, A.G.; Sayed, K.; Albagami, N. MPPT for a PV Grid-Connected System to Improve Efficiency under Partial Shading Conditions. Sustainability 2020, 12, 10310. [Google Scholar] [CrossRef]
- Flota-Bañuelos, M.; Cruz-Chan, J.; Kamal, T. Experimental Study of an Inverter Control for Reactive Power Compensation in a Grid-Connected Solar Photovoltaic System Using Sliding Mode Control. Energies 2023, 16, 853. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author Year, [Ref.] | FPPT Algorithm(s) | Type of Study | Summary |
|---|---|---|---|
| Mirhosseini et al., 2015 [36] | DC-link-energy-based FPPT control | Simulation | FPPT is carried out under constant irradiance condition. FPP of operation is always chosen to the right side of P-V curve. |
| Sangwongwanich et al., 2015 [37] | Fast FPPT control | Experimental | Advanced power control strategy is deployed to ensure fast and smooth transition between MPP and CPG. |
| Tafti et al., 2016 [38] | Fixed voltage step-based FPPT control | Simulation | FPP is tracked using constant voltage step-size under step-change in irradiance. |
| Sangwongwanich et al., 2017 [39] | Constant power generation method for power reservation | Simulation | A cost-effective constant power generation method is proposed and realized for power reserve. |
| Tafti et al., 2017 [40] | Dual perturbation time-step-based FPPT control | Experimental | Two perturbation time steps are selected for MPPT and FPPT operation. |
| Sangwongwanich et al., 2017 [41] | Delta power control (DPC) strategy for CPG | Experimental | A delta power control (DPC) method is proposed to increase the stability of grid-connected PV systems. |
| Tafti et al., 2018 [42] | Dual-step-size-based FPPT control | Experimental | Two distinct step-sizes are used for efficient tracking during transient and steady state. |
| Sangwongwanich et al., 2018 [43] | Current-based, power-based and P&O-based CPG control | Experimental | CPP is achieved by using three different CPG techniques based on current, power and P&O algorithm methods. |
| Tafti et al., 2019 [44] | Adaptive step-size-based FPPT control | Experimental | An adaptive step-size is used while tracking both MPP and FPP. |
| Narang et al., 2019 [45] | Dynamic-voltage-reference- and MPC-based FPPT control | Experimental | Duty cycle for FPPT is obtained using inductor current reference value. |
| Tafti et al., 2019 [46] | Multi-mode power-based FPPT algorithm | Experimental | Proposed a modified power-based FPPT algorithm that can track CPP on both left and right side of MPP i.e., called multi-mode operation. |
| Yan et al., 2020 [47] | DC-link-voltage-based FPPT control | Simulation | FPPT is tracked using model predictive controller when connected to a battery-based load. |
| Gomez-Merchan et al., 2021 [48] | Binary search-based FPPT control | Experimental | Speed of convergence is improved by iteratively reducing the search space to half of its previous value. |
| Kumaresan et al., 2021 [49] | Secant-method-based FPPT control | Experimental | The proposed algorithm tracks the FPP irrespective of increasing or decreasing power reference value and under sudden variations in irradiance. |
| Hou et al., 2021 [50] | Error-based active disturbance rejection control and P&O FPPT algorithm | Experimental | A flexible CPG scheme of error-based active disturbance rejection control P&O algorithm is proposed. |
| Xie et al., 2021 [51] | FPPT control under partial shading conditions | Simulation | Developed a hill-climbing-method-based FPPT control under partial shading conditions. |
| Kumar et al., 2021 [52] | Fuzzy logic controller (FLC)-based CPG method | Simulation | Proposed an FLC-based control to DC-DC boost converter to provide support to the grid-connected PV systems. |
| Tafti et al., 2022 [53] | Novel global FPPT control under partial shading conditions | Experimental | Developed a novel GFPPT control and tested the same under partial shading conditions. |
| Zhang et al., 2022 [54] | VSG-control-strategy-based FPPT algorithm | Simulation | Developed a virtual synchronous generator (VSG)-control-strategy-based FPPT algorithm. |
| Ahmed et al., 2022 [55] | Model-based MPPT and FPPT control | Simulation and Experimental | Developed a dc-link model based MPPT/FPPT control and finite-set model predictive control (FS-MPC) algorithm to manage the active and reactive power exchange in gird-connected PV systems. |
| Author Year, [Ref.] | FPPT Algorithm(s) | Type of Study | Summary |
|---|---|---|---|
| Tafti et al., 2019 [57] | A comparative study of power-based FPPT control | Experimental | Comparative study of various FPPT algorithms is performed. FPP is tracked using constant voltage step-size under step-change in irradiance. |
| Tafti et al., 2020 [56] | Comparative study of FPPT algorithms | Experimental | FPPT algorithms are compared to find the best suit FPPT algorithm from application point of view |
| Tafti et al., 2020 [58] | Comparative analysis of three FPPT algorithm | Experimental and Simulation | A comparative study of three FPPT algorithms is performed on the basis of design parameters. Additional experimental study reveals that among the three FPPT algorithms, the approach that calculates the voltage step adaptively performs better in steady-state and dynamic conditions than the other two FPPT algorithms. |
| Year, [Ref.] | Performance Parameters | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Type of Control Strategy | Variation in G (W/m2) | Region of Operation | Speed of Tracking | Steady-State Power Oscillations | Drift Severity Scenario | Partial Shading Scenario | Implementation Complexity | Stability | Fast Dynamic Response | Robustness | Reactive Power | Cost | Tracking Efficiency (%) | |
| 2016, [38] | Power-based | Step | Right | Low | High | No | No | High | No | Slow | No | No | High | Poor |
| 2017, [39] | Power-based | Ramp | Left | Low | High | No | No | High | No | Medium | No | Yes | High | Poor |
| 2017, [40] | Voltage-based | Step | Right | Low | High | No | No | Low | No | Slow | No | No | High | Poor |
| 2018, [42] | Voltage-based | Step | Right | Medium | High | No | No | High | No | Slow | No | No | Low | Good |
| 2018, [43] | Voltage-based, Current-based, Power-based | Step and ramp | Right | Medium | High | No | No | Low | No | Medium | No | Yes | Low | Excellent |
| 2019, [44] | Voltage-based | Step | Right | Low | Medium | No | No | High | No | Slow | No | No | High | Poor |
| 2019, [46] | Power-based | Step and ramp | Right | Medium | Medium | Yes | No | Low | Yes | Fast | Yes | No | Low | Good |
| 2020, [47] | Voltage-based | Step | Right | Medium | High | No | No | High | No | Slow | No | No | High | Good |
| 2021, [48] | Voltage-based | Step | Both | Medium | High | No | No | High | No | Slow | No | No | High | Poor |
| 2021, [49] | Power-based | Step and ramp | Both | Medium | High | No | No | High | No | Medium | No | No | High | Excellent |
| 2021, [50] | Power-based | Step | Both | Medium | Medium | No | No | Medium | No | Slow | No | No | High | Excellent |
| 2021, [51] | Power-based | Uniform | Both | Medium | Low | Yes | Yes | Medium | Yes | Fast | Yes | No | High | Excellent |
| 2022, [54] | Voltage-based | Step | Right | Medium | Low | No | No | Medium | No | Slow | No | No | Low | Good |
| 2022, [55] | Power-based | Step | Right | High | Low | Yes | Yes | Medium | No | Slow | No | Yes | High | Excellent |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sharma, S.; Jately, V.; Kuchhal, P.; Kala, P.; Azzopardi, B. A Comprehensive Review of Flexible Power-Point-Tracking Algorithms for Grid-Connected Photovoltaic Systems. Energies 2023, 16, 5679. https://doi.org/10.3390/en16155679
Sharma S, Jately V, Kuchhal P, Kala P, Azzopardi B. A Comprehensive Review of Flexible Power-Point-Tracking Algorithms for Grid-Connected Photovoltaic Systems. Energies. 2023; 16(15):5679. https://doi.org/10.3390/en16155679
Chicago/Turabian StyleSharma, Sakshi, Vibhu Jately, Piyush Kuchhal, Peeyush Kala, and Brian Azzopardi. 2023. "A Comprehensive Review of Flexible Power-Point-Tracking Algorithms for Grid-Connected Photovoltaic Systems" Energies 16, no. 15: 5679. https://doi.org/10.3390/en16155679