
Load Frequency Control Using the Particle Swarm Optimisation Algorithm and PID Controller for Effective Monitoring of Transmission Line


Abstract
:1. Introduction
The Main Contribution of the Proposed Model
2. Methodology
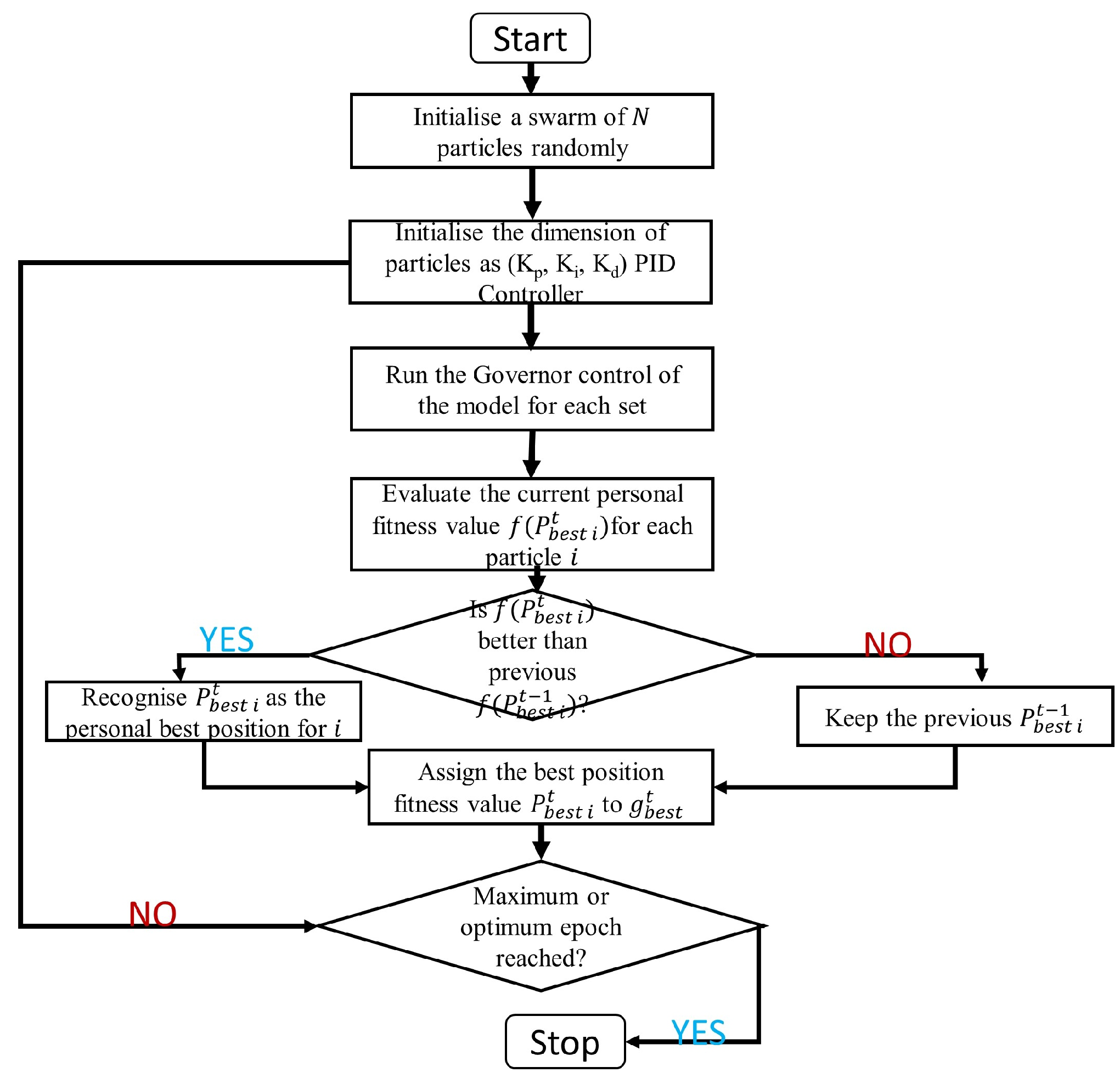
3. Particle Swarm Optimisation
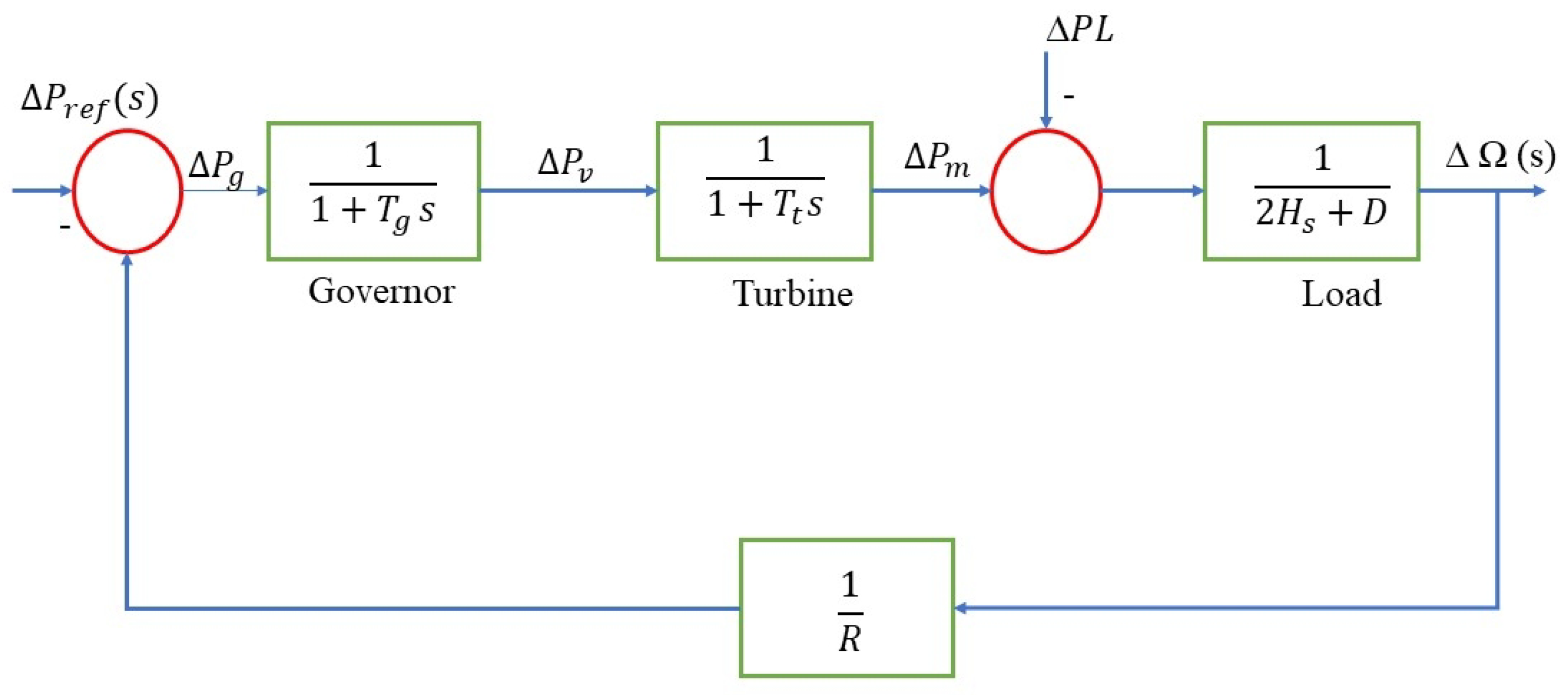
4. System Model
4.1. Generator Model
4.2. Load Model
4.3. Turbine or Prime Mover Model
4.4. Governor Model
4.5. The Proportional Integral Derivative (PID) Controller
- Better performance: The PSO-PID controller algorithm has been found to provide better control performance than conventional PID controllers in LFC systems. This is due to the ability of PSO to optimise the PID parameters to achieve the desired control objective.
- Robustness: The PSO-PID controller algorithm is robust and can handle variations in load and system parameters, which are common in power systems.
- Flexibility: The PSO-PID controller algorithm can be easily adapted to different power system models and can be used to control different types of generators.
- Fast convergence: The PSO algorithm has fast convergence compared to other optimisation techniques, which makes it suitable for real-time control applications.
- Easy to implement: The PSO-PID controller algorithm is easy to implement and does not require complex mathematical models or sophisticated programming skills.
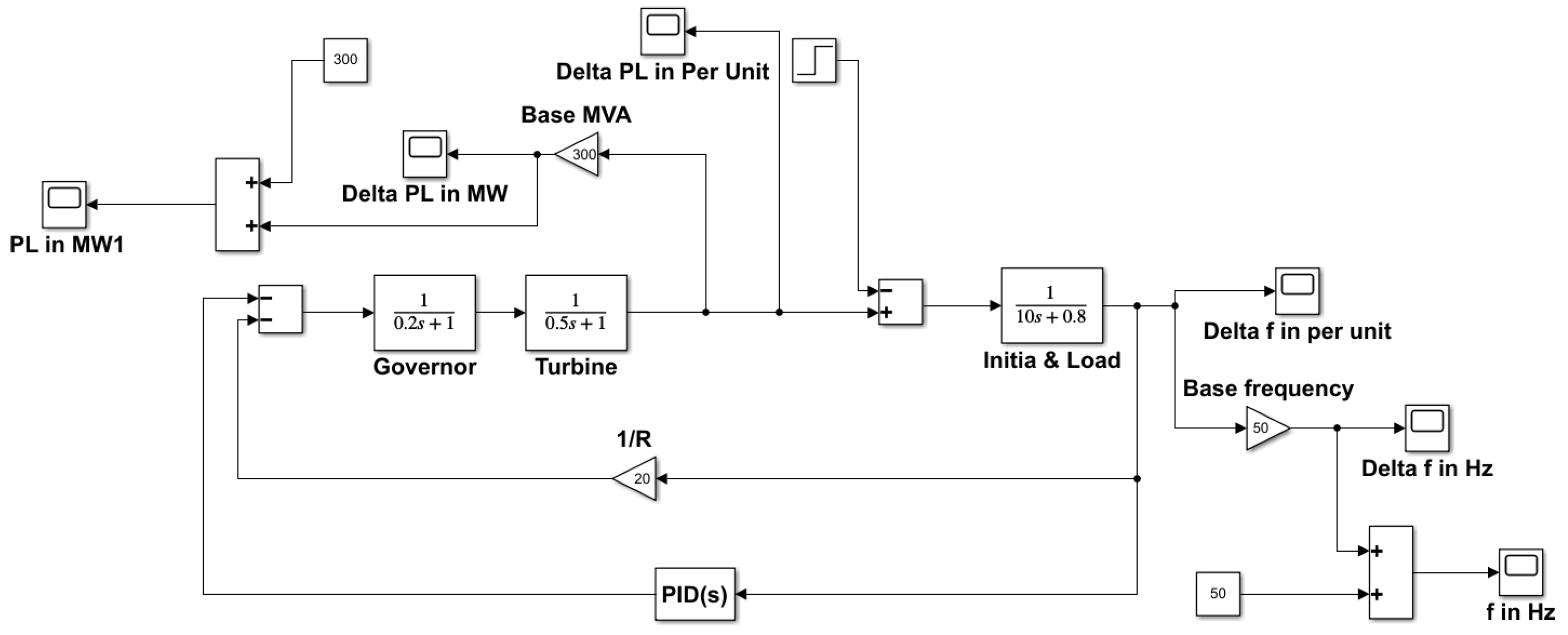
5. Modelling of the Proposed Power System
6. Results and Discussion
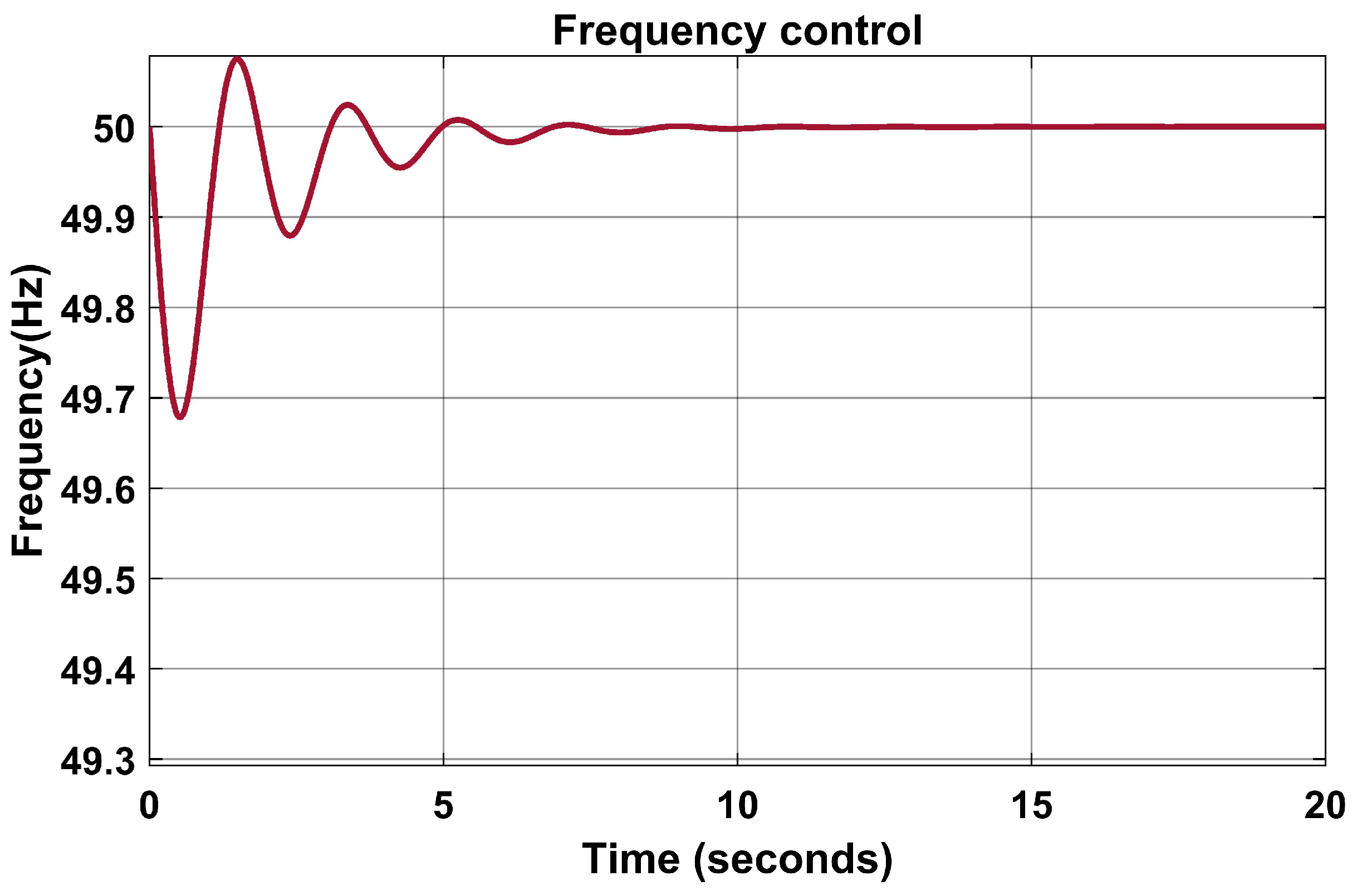
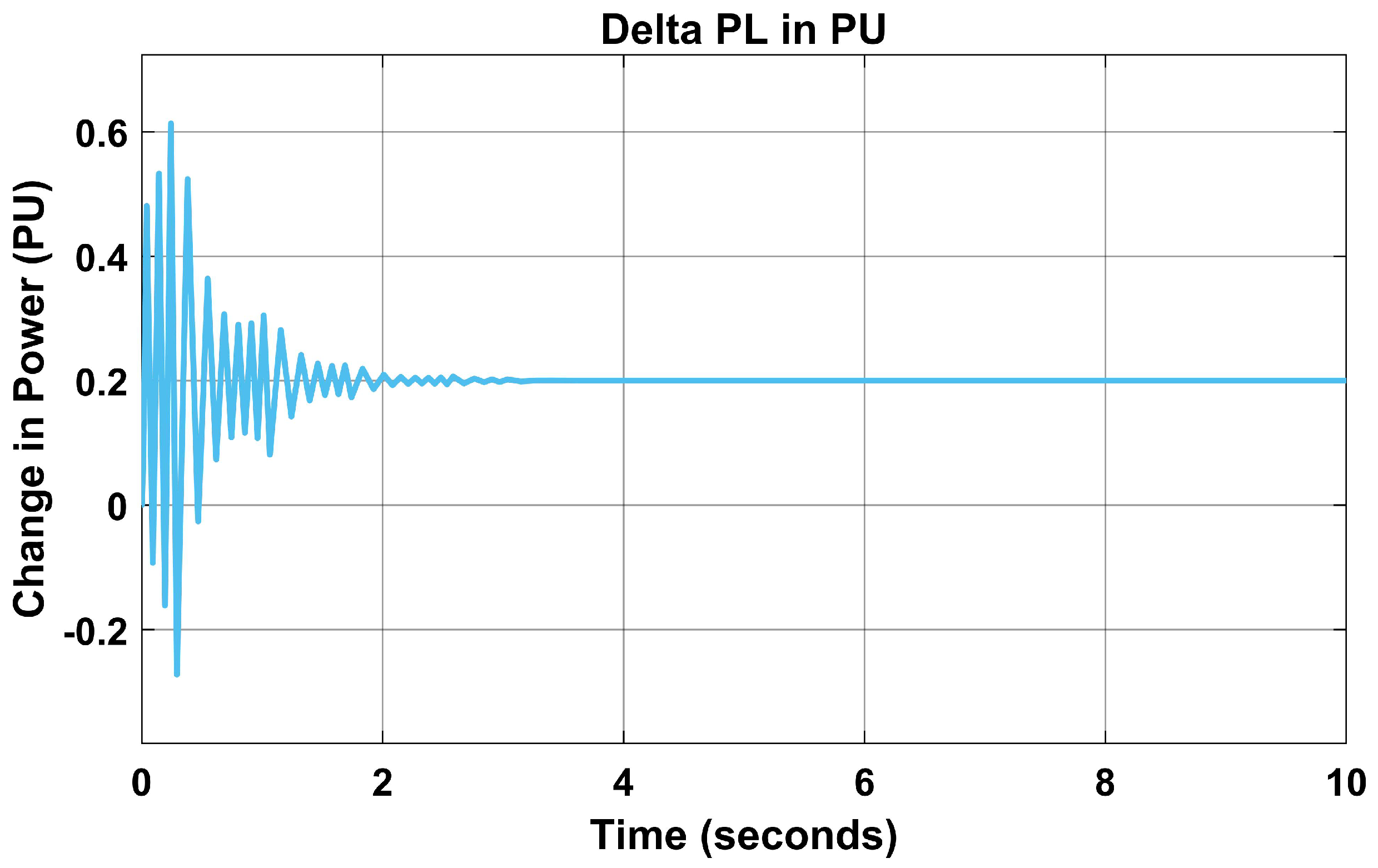
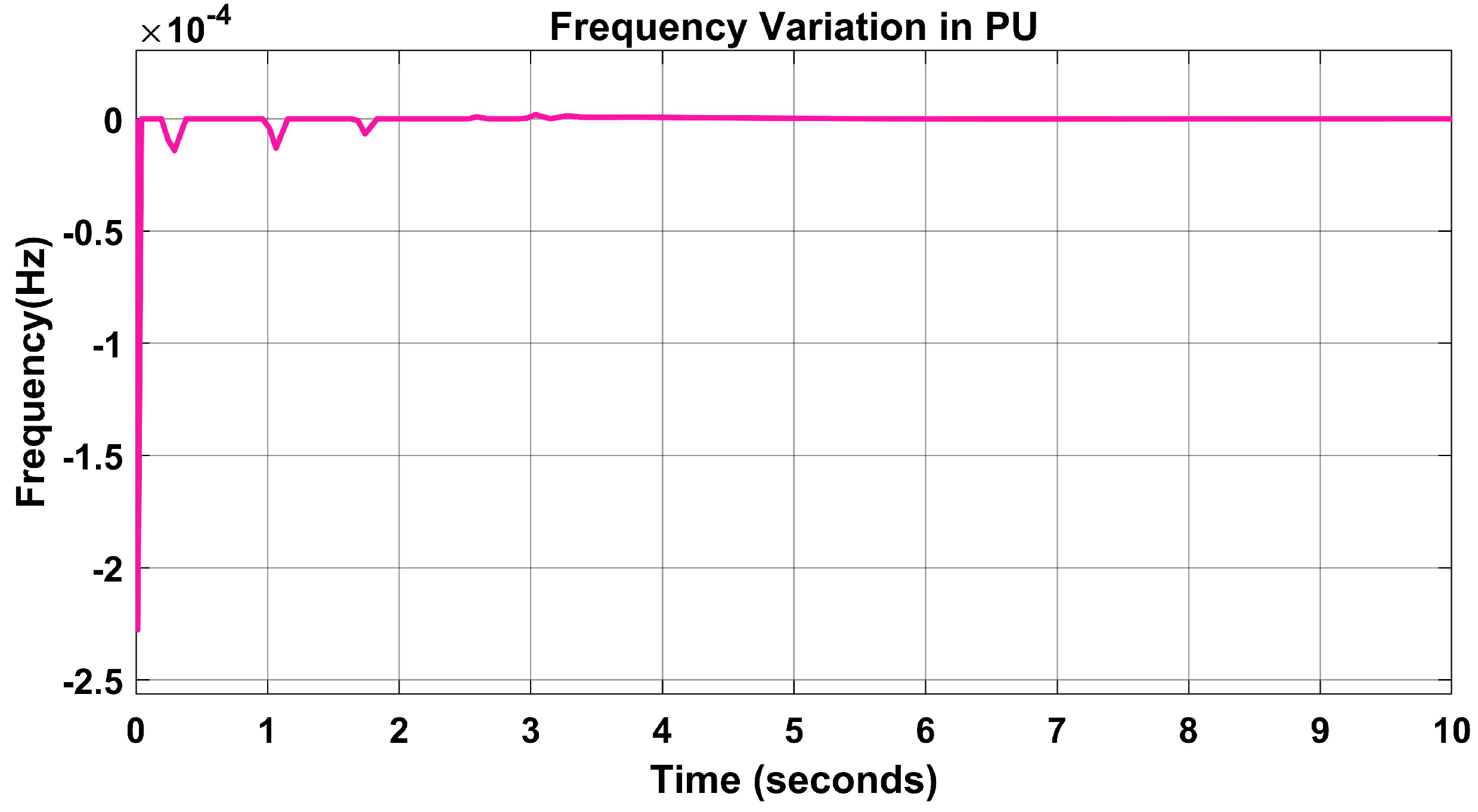
6.1. Frequency Control Using the PSO Algorithm
6.2. Comparing the PSO-PID Controller Algorithm with Other LFC Techniques
- Automatic generation control (AGC): AGC is a control system that adjusts the output of generators in response to variations in frequency to maintain the balance between generation and load. When the frequency falls, AGC may automatically boost the output of other generators to compensate for the lost generation, restoring the frequency to its usual range.
- Load shedding: Load shedding is a control method used to minimise power system demand during times of low generation or high demand. Load shedding may be used to lower the load on the system and assist in restoring the frequency to its normal range in the case of a frequency deviation. This may include disconnecting individual loads or lowering the electricity usage of specific consumers or areas.
- Reserve capacity: The generating capacity available to the system beyond the predicted demand is called reserve capacity. Reserve capacity is crucial because it acts as a buffer to absorb unforeseen occurrences like the abrupt loss of a generator. By ensuring that the system has appropriate reserve capacity, the frequency variation may be corrected rapidly without jeopardising system stability.
- Interconnection with surrounding systems: Interconnection with neighbouring power systems may offer new generation sources while also assisting in balancing energy supply and demand across a larger region. Interconnection with surrounding systems may give extra assistance to help restore the frequency to its normal range in the case of a frequency deviation.
- Energy storage: Energy storage technologies, such as batteries or pumped hydro storage, may be utilised to store surplus generating capacity and release it as required, therefore assisting in maintaining system stability. Frequency variation may be swiftly rectified and system stability maintained by deploying energy storage to offer extra assistance to the system during times of low generation.Power system operators may use these steps to guarantee that the frequency stays within a small range, reducing the danger of power outages or equipment damage.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| LFC | Load Frequency Control |
| PSO | Particle Swarm Optimisation |
| PDPI | Proportional Derivative Proportional Integral |
| PID | Proportional Integral Derivative |
| DWT | Discrete Wavelet Transform |
| ITAE | Integral Time Absolute Error |
| GRC | Generation Rate Constraint |
| AGC | Automatic Generation Control |
| MPC | Model Predictive Control |
| GA | Genetic Algorithm |
References
- Parmar, K.S.; Majhi, S.; Kothari, D. Load frequency control of a realistic power system with multi-source power generation. Int. J. Electr. Power Energy Syst. 2012, 42, 426–433. [Google Scholar] [CrossRef]
- Sarker, M.A.A.; Hasan, A.K. Load frequency Control in Power system. SEU J. Sci. Eng. 2016, 10, 24–30. [Google Scholar]
- Samarakoon, K.B. Use of Smart Meters for Frequency and Voltage Control. Ph.D. Thesis, Cardiff University, Cardiff, UK, 2012. [Google Scholar]
- Indonesia, B.K. Rules for Machinery Installations. Rules Classif. Constr. 2019, 3, 2–26. [Google Scholar]
- Zografos, D. Power System Inertia Estimation and Frequency Response Assessment. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2019. [Google Scholar]
- Shayeghi, H.; Jalili, A.; Shayanfar, H. Multi-stage fuzzy load frequency control using PSO. Energy Convers. Manag. 2008, 49, 2570–2580. [Google Scholar] [CrossRef]
- Anuradhika, K.; Dash, P. Genetic Algorithm-Based Load Frequency Control of a Grid-Connected Microgrid in Presence of Electric Vehicles. In Sustainable Energy and Technological Advancements: Proceedings of ISSETA 2021; Springer: Berlin/Heidelberg, Germany, 2022; pp. 435–447. [Google Scholar]
- Safari, A.; Babaei, F.; Farrokhifar, M. A load frequency control using a PSO-based ANN for micro-grids in the presence of electric vehicles. Int. J. Ambient Energy 2021, 42, 688–700. [Google Scholar] [CrossRef]
- Dhillon, S.S.; Lather, J.S.; Marwaha, S. Multi area load frequency control using particle swarm optimization and fuzzy rules. Procedia Comput. Sci. 2015, 57, 460–472. [Google Scholar] [CrossRef] [Green Version]
- Lastomo, D.; Setiadi, H.; Djalal, M.R. Enabling PID and SSSC for load frequency control using Particle Swarm Optimization. In Proceedings of the 2017 3rd International Conference on Science in Information Technology (ICSITech), Bandung, Indonesia, 25–26 October 2017; IEEE: New York, NY, USA; pp. 182–187. [Google Scholar]
- Gupta, D.K.; Jha, A.V.; Appasani, B.; Srinivasulu, A.; Bizon, N.; Thounthong, P. Load frequency control using hybrid intelligent optimization technique for multi-source power systems. Energies 2021, 14, 1581. [Google Scholar] [CrossRef]
- Sahoo, P.K.; Mohapatra, S.; Gupta, D.K.; Panda, S. Multi verse optimized fractional order PDPI controller for load frequency control. IETE J. Res. 2022, 68, 3302–3315. [Google Scholar] [CrossRef]
- Sakellariou, N. Current and potential decommissioning scenarios for end-of-life composite wind blades. Energy Syst. 2018, 9, 981–1023. [Google Scholar] [CrossRef]
- Kom, C.H. Understanding interphase power controller: A description. J. Electr. Eng. Electron. Control Comput. Sci. 2020, 6, 19–24. [Google Scholar]
- Fan, W.; Hu, Z.; Veerasamy, V. PSO-Based Model Predictive Control for Load Frequency Regulation with Wind Turbines. Energies 2022, 15, 8219. [Google Scholar] [CrossRef]
- Kunya, A.; Argin, M.; Kucuksari, S. Optimal load frequency control of multi-area power system considering incremental control action. In Proceedings of the 2019 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 7–8 February 2019; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Gözde, H.; Taplamacıoğlu, M.; Kocaarslan, I.; Çam, E. Particle swarm optimization based load frequency control in a single area power system. Univ. Pitesti Comput. Sci. Sci. Bull. 2008, 2. [Google Scholar]
- Sarir, N.; Morsli, S.; Allaoui, T.; Denai, M. Optimal fractional-order pi control design for a variable speed PMSG-based wind turbine. J. Eur. Syst. Autom. 2021, 915–922. [Google Scholar]
- Kullapadayachi Govindaraju, S.; Sivalingam, R.; Panda, S.; Sahu, P.R.; Padmanaban, S. Frequency Control of Power System with Distributed Sources by Adaptive Type 2 Fuzzy PID Controller. Electr. Power Comp. Syst. 2023, 1–22. [Google Scholar] [CrossRef]
- Qin, Z.; Liu, D.; Hua, H.; Cao, J. Privacy preserving load control of residential microgrid via deep reinforcement learning. IEEE Trans. Smart Grid 2021, 12, 4079–4089. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. A discrete binary version of the particle swarm algorithm. In Computational Cybernetics and Simulation Proceedings of the 1997 IEEE International Conference on Systems, Man, and Cybernetics, Orlando, FL, USA, 12–15 October 1997; IEEE: New York, NY, USA, 1997; Volume 5, pp. 4104–4108. [Google Scholar]
- Shariati, M.; Mafipour, M.S.; Mehrabi, P.; Bahadori, A.; Zandi, Y.; Salih, M.N.; Nguyen, H.; Dou, J.; Song, X.; Poi-Ngian, S. Application of a hybrid artificial neural network-particle swarm optimization (ANN-PSO) model in behavior prediction of channel shear connectors embedded in normal and high-strength concrete. Appl. Sci. 2019, 9, 5534. [Google Scholar] [CrossRef] [Green Version]
- Angeline, P.J. Using selection to improve particle swarm optimization. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings. IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; IEEE: New York, NY, USA, 1998; pp. 84–89. [Google Scholar]
- Rao, R.N.; Reddy, P.R.K. PSO based tuning of PID controller for a Load frequency control in two area power system. Int. J. Eng. Res. Appl. 2015, 1, 1499–1505. [Google Scholar]
- Mahboob Ul Hassan, S.; Ramli, M.A.; Milyani, A.H. Robust Load Frequency Control of Hybrid Solar Power Systems using Optimization techniques. Front. Energy Res. 2022, 10, 730. [Google Scholar] [CrossRef]
- Yang-Wu, S.; Xun, M.; Ao, P.; Yang-Guang, W.; Ting, C.; Ding, W.; Jian, Z. Load frequency control strategy for wind power grid-connected power systems considering wind power forecast. In Proceedings of the 2019 IEEE 3rd Conference on Energy Internet and Energy System Integration (EI2), Changsha, China, 8–10 November 2019; IEEE: New York, NY, USA, 2019; pp. 1124–1128. [Google Scholar]
- Tur, M.R.; Wadi, M.; Shobole, A.; Ay, S. Load frequency control of two area interconnected power system using fuzzy logic control and PID controller. In Proceedings of the 2018 7th International Conference on Renewable Energy Research and Applications (ICRERA), Paris, France, 14–17 October 2018; IEEE: New York, NY, USA, 2018; pp. 1253–1258. [Google Scholar]
- Qiu, Q.; Ma, R.; Kurths, J.; Zhan, M. Swing equation in power systems: Approximate analytical solution and bifurcation curve estimate. Chaos Interdiscip. J. Nonlinear Sci. 2020, 30, 013110. [Google Scholar] [CrossRef]
- Glover, J.D.; Sarma, M.S.; Overbye, T. Power System Analysis & Design, SI Version; Cengage Learning: Boston, MA, USA, 2012. [Google Scholar]
- Kumari, K.; Shankar, G.; Kumari, S.; Gupta, S. Load frequency control using ANN-PID controller. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Aung, S.S.; Htike, Z.M. Modeling and Simulation of Load Frequency Control for Three Area Power System Using Proportional Integral Derivative (PID) Controller. Am. Sci. Res. J. Eng. Technol. Sci. 2016, 26, 301–315. [Google Scholar]
- Tan, W. Unified tuning of PID load frequency controller for power systems via IMC. IEEE Trans. Power Syst. 2009, 25, 341–350. [Google Scholar] [CrossRef]
- Dhanasekaran, B.; Kaliannan, J.; Baskaran, A.; Dey, N.; Tavares, J.M.R. Load Frequency Control Assessment of a PSO-PID Controller for a Standalone Multi-Source Power System. Technologies 2023, 11, 22. [Google Scholar] [CrossRef]
- Çam, E.; Kocaarslan, I. Load frequency control in two area power systems using fuzzy logic controller. Energy Convers. Manag. 2005, 46, 233–243. [Google Scholar] [CrossRef]
- Çam, E. Application of fuzzy logic for load frequency control of hydroelectrical power plants. Energy Convers. Manag. 2007, 48, 1281–1288. [Google Scholar] [CrossRef]
- Arya, Y. Improvement in automatic generation control of two-area electric power systems via a new fuzzy aided optimal PIDN-FOI controller. ISA Trans. 2018, 80, 475–490. [Google Scholar] [CrossRef]
- Mohammed, A.J.; Al-Majidi, S.D.; Al-Nussairi, M.K.; Abbod, M.F.; Al-Raweshidy, H.S. Design of a Load Frequency Controller based on Artificial Neural Network for Single-Area Power System. In Proceedings of the 2022 57th International Universities Power Engineering Conference (UPEC), Istanbul, Turkey, 30 August–2 September 2022; IEEE: New York, NY, USA, 2022; pp. 1–5. [Google Scholar]
- Osman, A.M.; Magzoub, M.A.; Salem, A. Load Frequency Control in Two Area Power System using GA, SA and PSO Algorithms: A Comparative Study. In Proceedings of the 2021 31st Australasian Universities Power Engineering Conference (AUPEC), Perth, WA, Australia, 26–30 September 2021; IEEE: New York, NY, USA, 2021; pp. 1–8. [Google Scholar]
- Babakhani, Q.M. Load Frequency Control in Two Area Power System Using Sliding Mode Control. J. Artif. Intell. Electr. Eng. 2014, 3, 24–36. [Google Scholar]
- Appikonda, P.; Kasibhatla, R.S. Design of support vector machine controller for hybrid power system automatic generation control. Energy Sources Part A Recover. Util. Environ. Eff. 2022, 44, 3883–3907. [Google Scholar] [CrossRef]
- Hemeida, A.; Mohamed, S.; Mahmoud, M. Load frequency control using optimized control techniques. JES J. Eng. Sci. 2020, 48, 1119–11136. [Google Scholar] [CrossRef]
- Raj, T.D.; Kumar, C.; Kotsampopoulos, P.; Fayek, H.H. Load Frequency Control in Two-Area Multi-Source Power System Using Bald Eagle-Sparrow Search Optimization Tuned PID Controller. Energies 2023, 16, 2014. [Google Scholar] [CrossRef]
- Feleke, S.; Satish, R.; Salkuti, S.R.; Abdelaziz, A.Y. Load Frequency Control in Two-Area Interconnected Systems Using DE-PID and PSO-PID. In Power Quality in Microgrids: Issues, Challenges and Mitigation Techniques; Springer: Berlin/Heidelberg, Germany, 2023; pp. 391–407. [Google Scholar]
- Nireekshana, N.; Ramachandran, R.; Narayana, G. A Novel Swarm Approach for Regulating Load Frequency in Two-Area Energy Systems. Int. J. Electr. Electron. Res. 2023, 11, 371–377. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Specification |
|---|---|
| Normal frequency (Hz) | 50 Hz |
| Turbine-rated power (PL) | 300 MW |
| The turbine time constant () | 0.5 s |
| Governor time constant () | 0.2 s |
| Governor speed regulation (R) | 0.05 PU |
| Generator inertia constant (H) | 5 s |
| Load variation (D) | 0.8 |
| Controller Used | Settling Time (s) | Controller Error | Overshoot | Reference |
|---|---|---|---|---|
| FUZZY Controller | 7.20 | 0.2% | 0.027 | [34] |
| Fuzzy Controller | 15.4 | 2.5% | 2.33 | [35] |
| PID Controller | 16.58 | 0.732 | 0.0206 | [36] |
| ANN-PID Controller | 6.5 | 0.04% | 0.1090 | [30] |
| Optimal ANN | 50.0 | 0.06% | 3.4 | [37] |
| ANFIS Controller | 8.5 | - | −0.45 | [38,39] |
| SVM Controller | 10.5 | 7.09% | 0.25 | [40] |
| GA-PID Controller | 21.8 | 0.0075% | 0.04 | [7] |
| GA-PID Controller | 5.0 | 0.50025% | 0.0 | [41] |
| BESSO-PID Controller | 10.4767 | - | 0.0001 | [42] |
| DE-PID Controller | 11.1892 | - | 0.001 | [43] |
| PID-PSO Controller | 2.93 | 0.055% | 0.052 | [44] |
| Proposed Algorithm with PID | 5.0 | 0.0005757 | 0.45 | |
| Proposed Algorithm with PSO-PID | 0.0 | 0.0005757 | 0.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ogar, V.N.; Hussain, S.; Gamage, K.A.A. Load Frequency Control Using the Particle Swarm Optimisation Algorithm and PID Controller for Effective Monitoring of Transmission Line. Energies 2023, 16, 5748. https://doi.org/10.3390/en16155748
Ogar VN, Hussain S, Gamage KAA. Load Frequency Control Using the Particle Swarm Optimisation Algorithm and PID Controller for Effective Monitoring of Transmission Line. Energies. 2023; 16(15):5748. https://doi.org/10.3390/en16155748
Chicago/Turabian StyleOgar, Vincent N., Sajjad Hussain, and Kelum A. A. Gamage. 2023. "Load Frequency Control Using the Particle Swarm Optimisation Algorithm and PID Controller for Effective Monitoring of Transmission Line" Energies 16, no. 15: 5748. https://doi.org/10.3390/en16155748