
Economic and Energy Analysis of the Construction of a Wind Farm with Infrastructure in the Baltic Sea
 ,
,  , , and
, , and
Abstract
:1. Introduction
2. Literature Review
- (a)
- Onshore wind power—within this category, we can distinguish:
- -
- Large-scale wind energy—single turbines with capacities usually above 1 MW or wind farms (consisting of several or several dozen wind turbines) producing electricity in order to sell it to the grid;
- -
- Small (distributed) wind energy—single wind turbines with a capacity not exceeding 100 kW, located mainly near homes as an alternative energy source; small wind farms are also used where there is no economic justification for supplying energy from the power grid (e.g., supplying lighting for road signs, billboards, etc.);
- -
- Medium-scale wind energy—individual turbines with capacities in the range of 200–600 kW, connected to the power grid, owned by individuals, small enterprises, or local communities;
- (b)
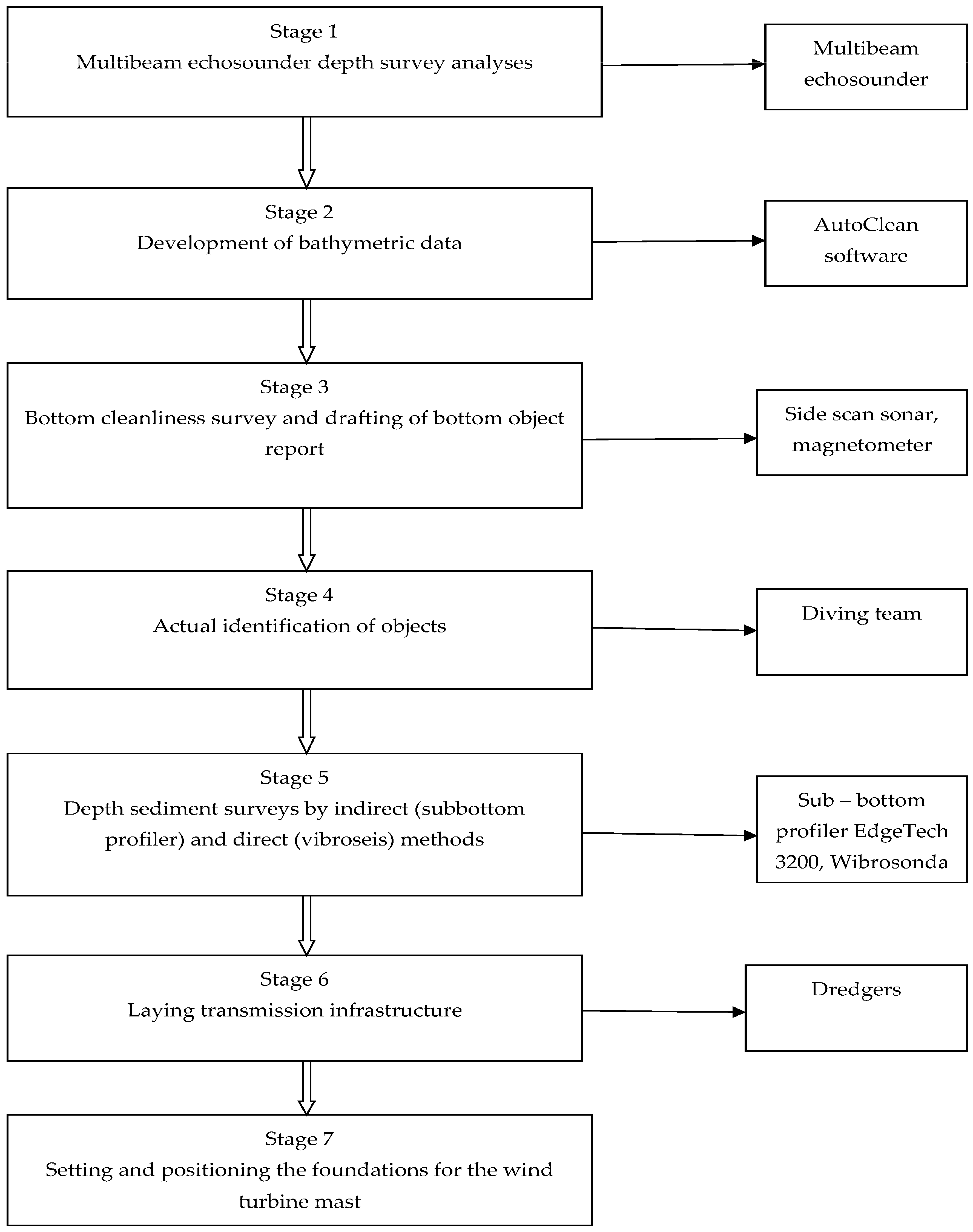
3. Seabed Measurements and Surveys
3.1. Multibeam Echo Sounder Depth Testing
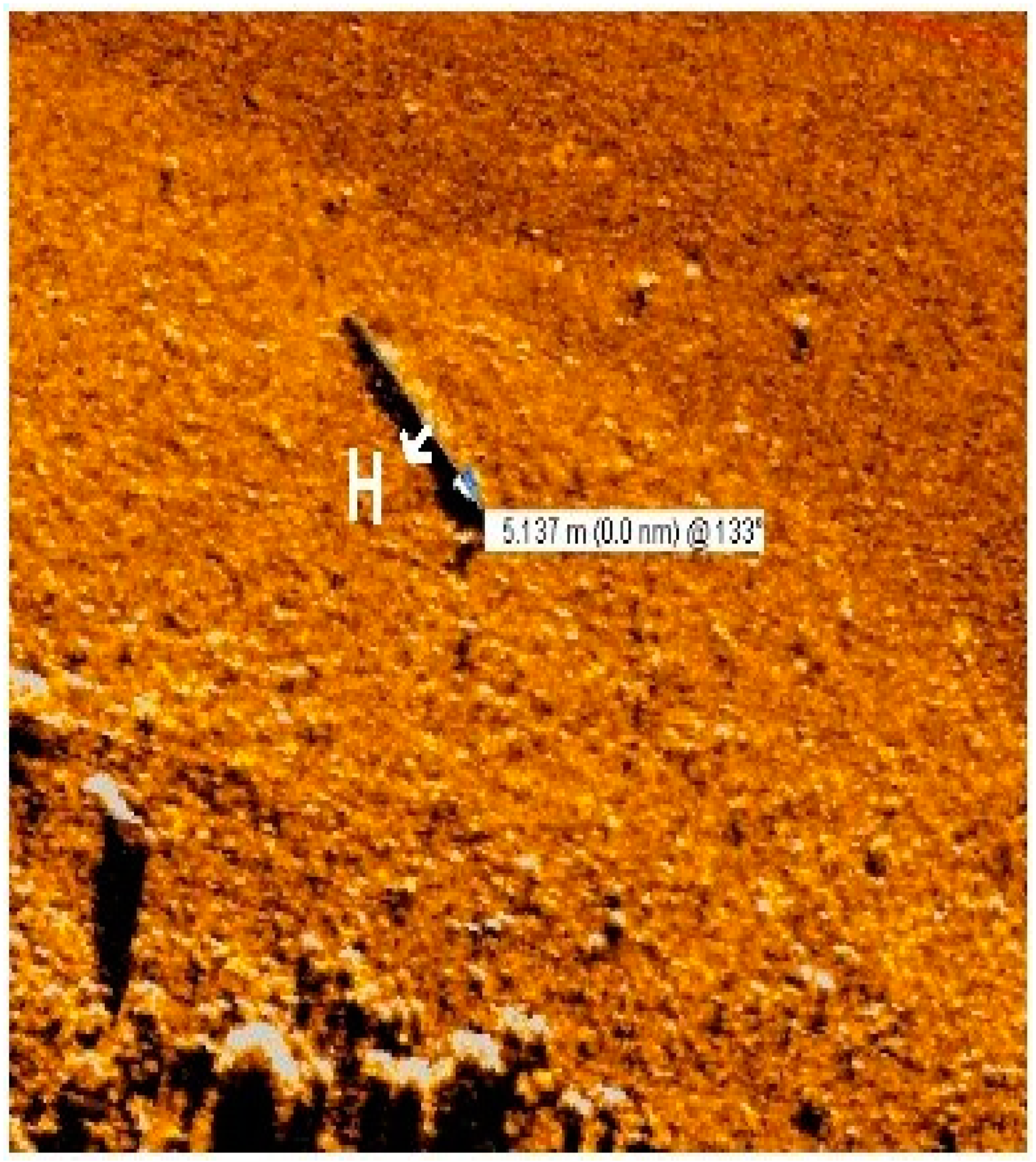
3.2. Bottom Cleanliness Tests and Report of Objects Resting on the Bottom
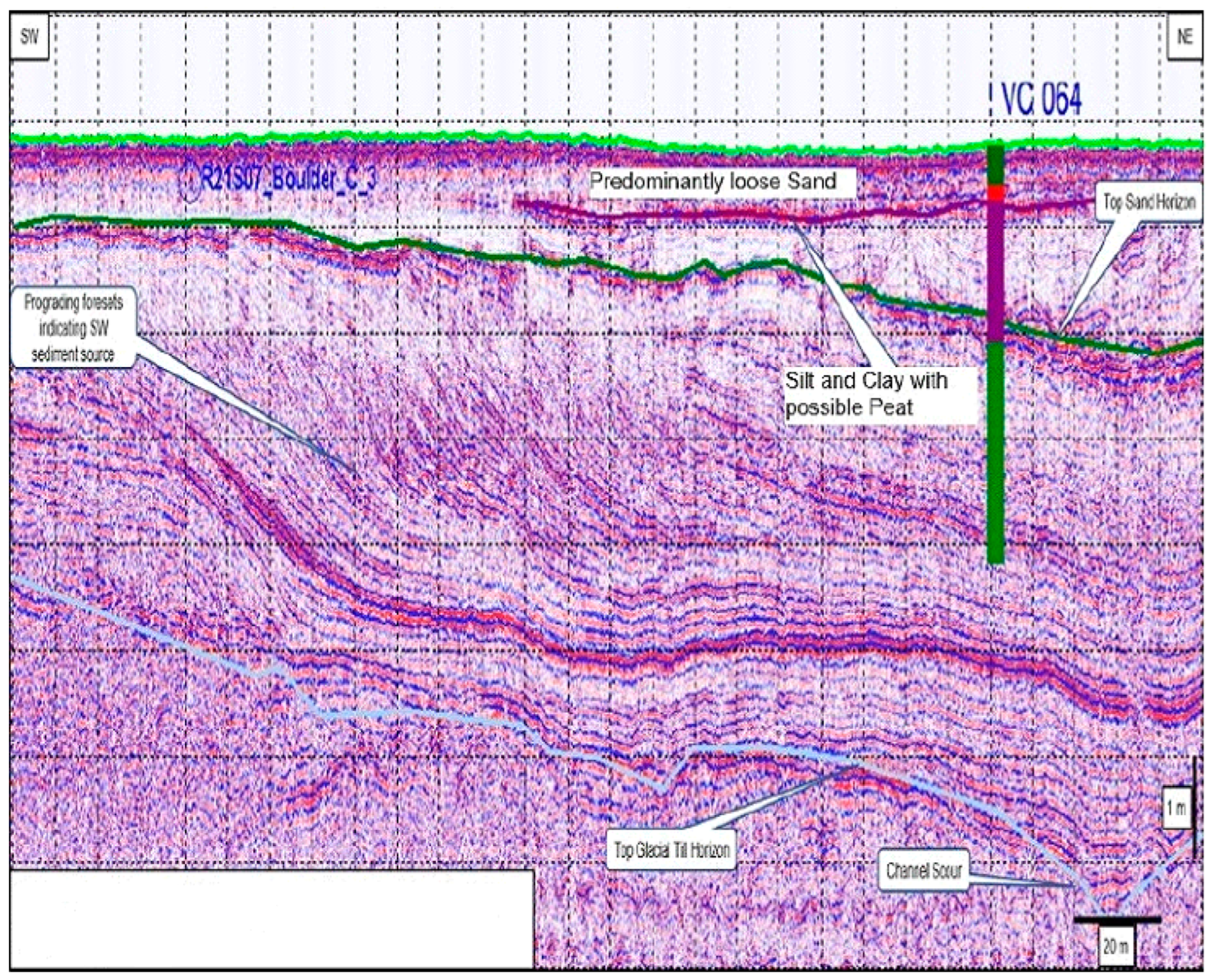
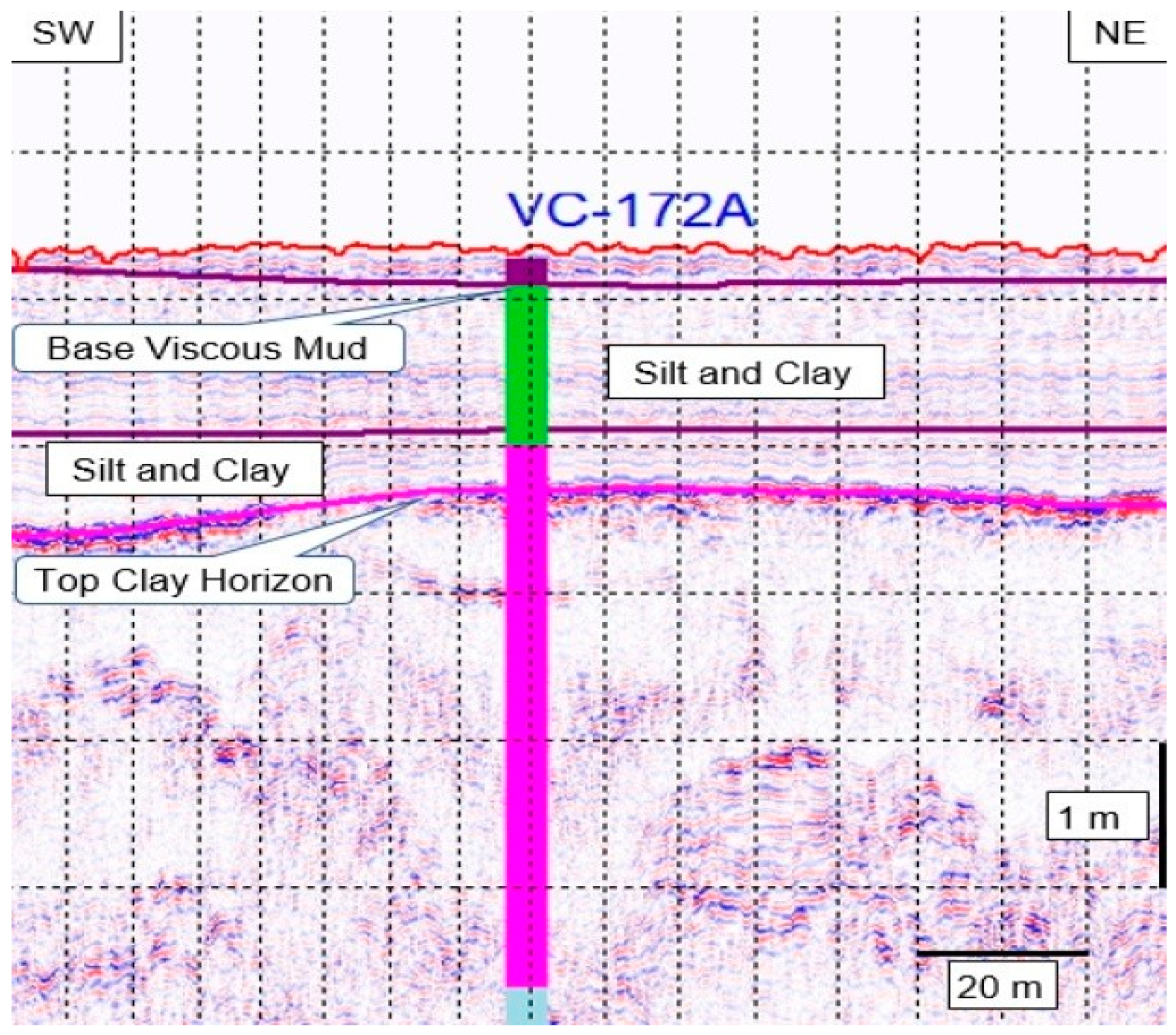
3.3. Sub-Bottom Profiler and Drilling with a Vibro Probe
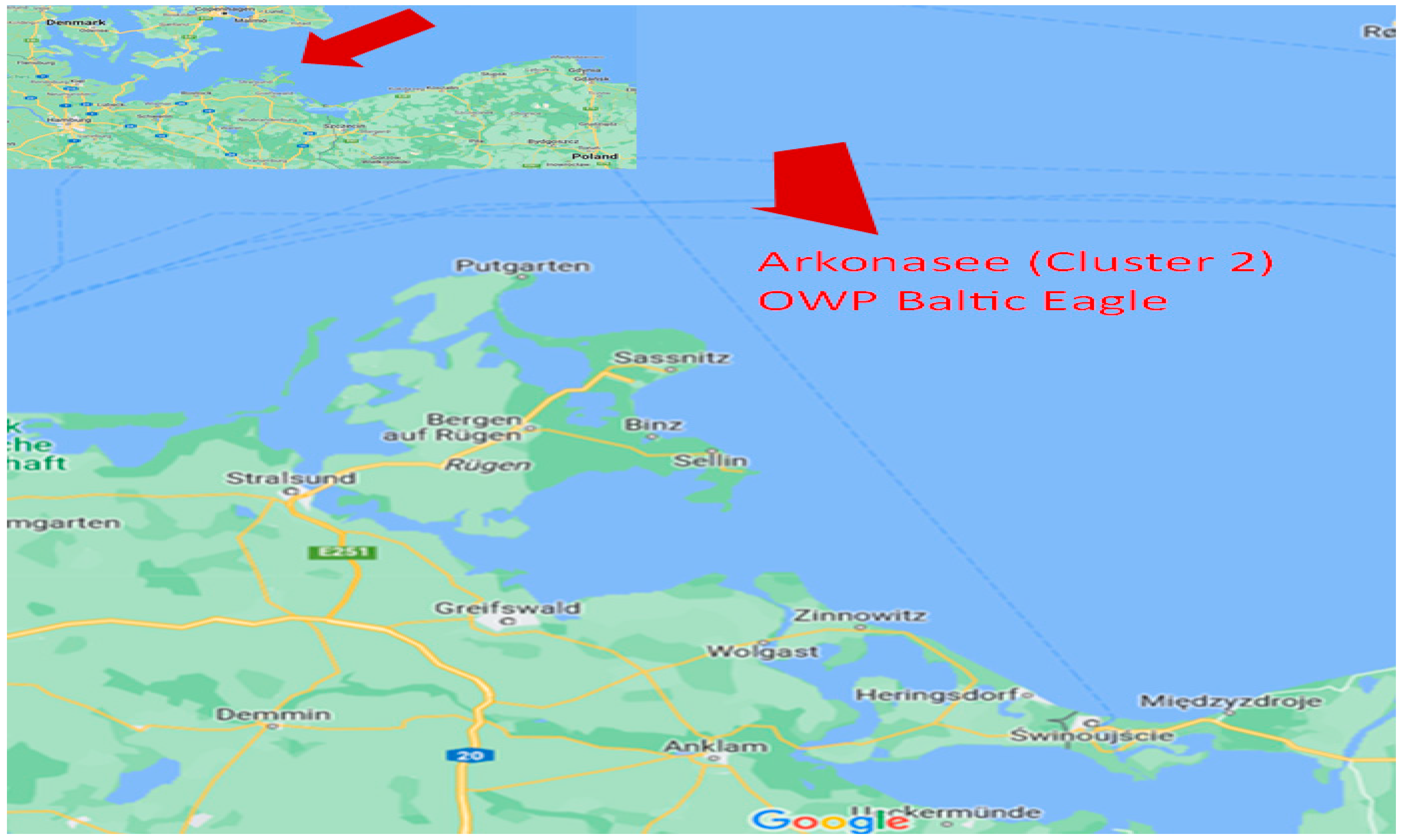
4. Research Area
5. Research Methodology
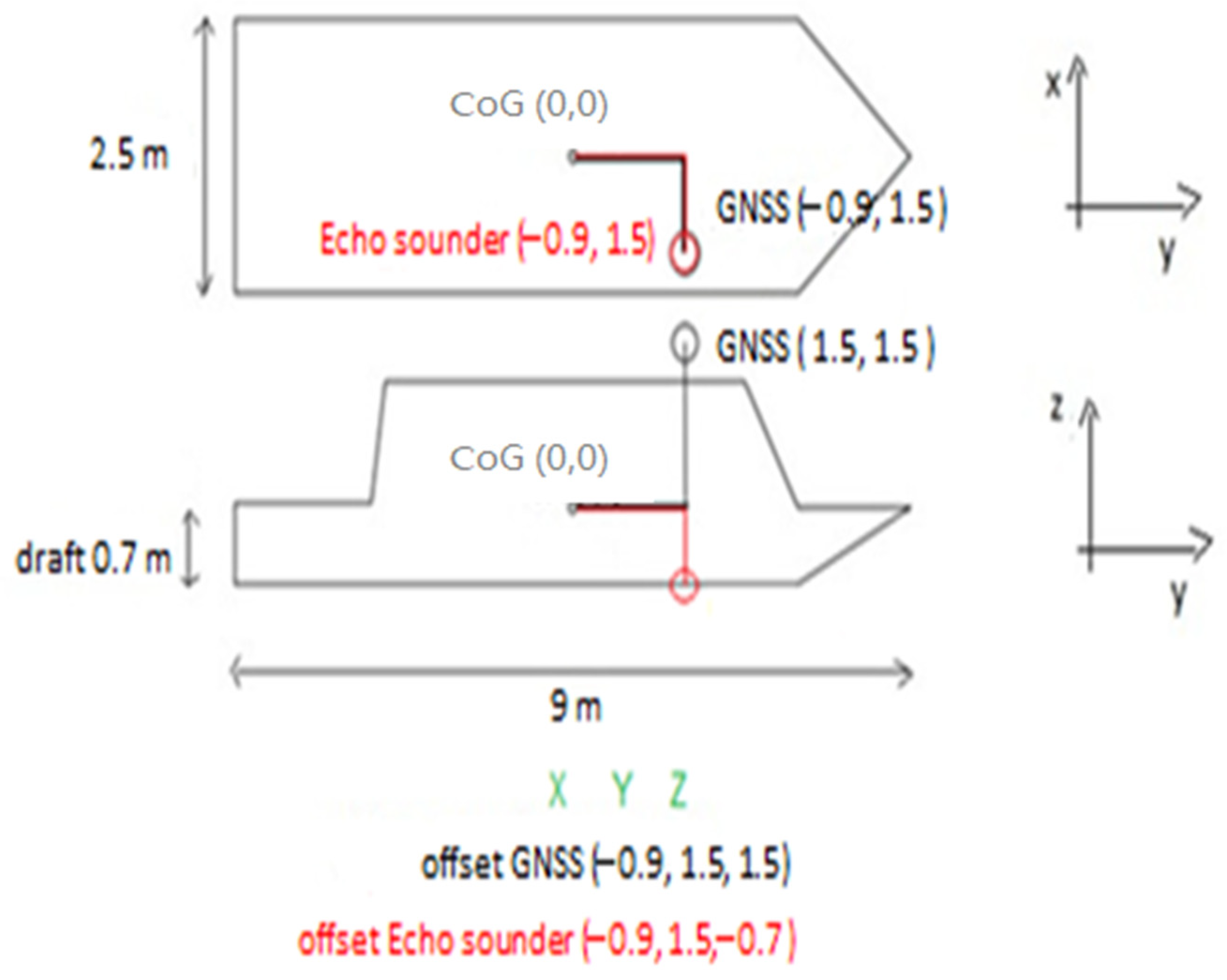
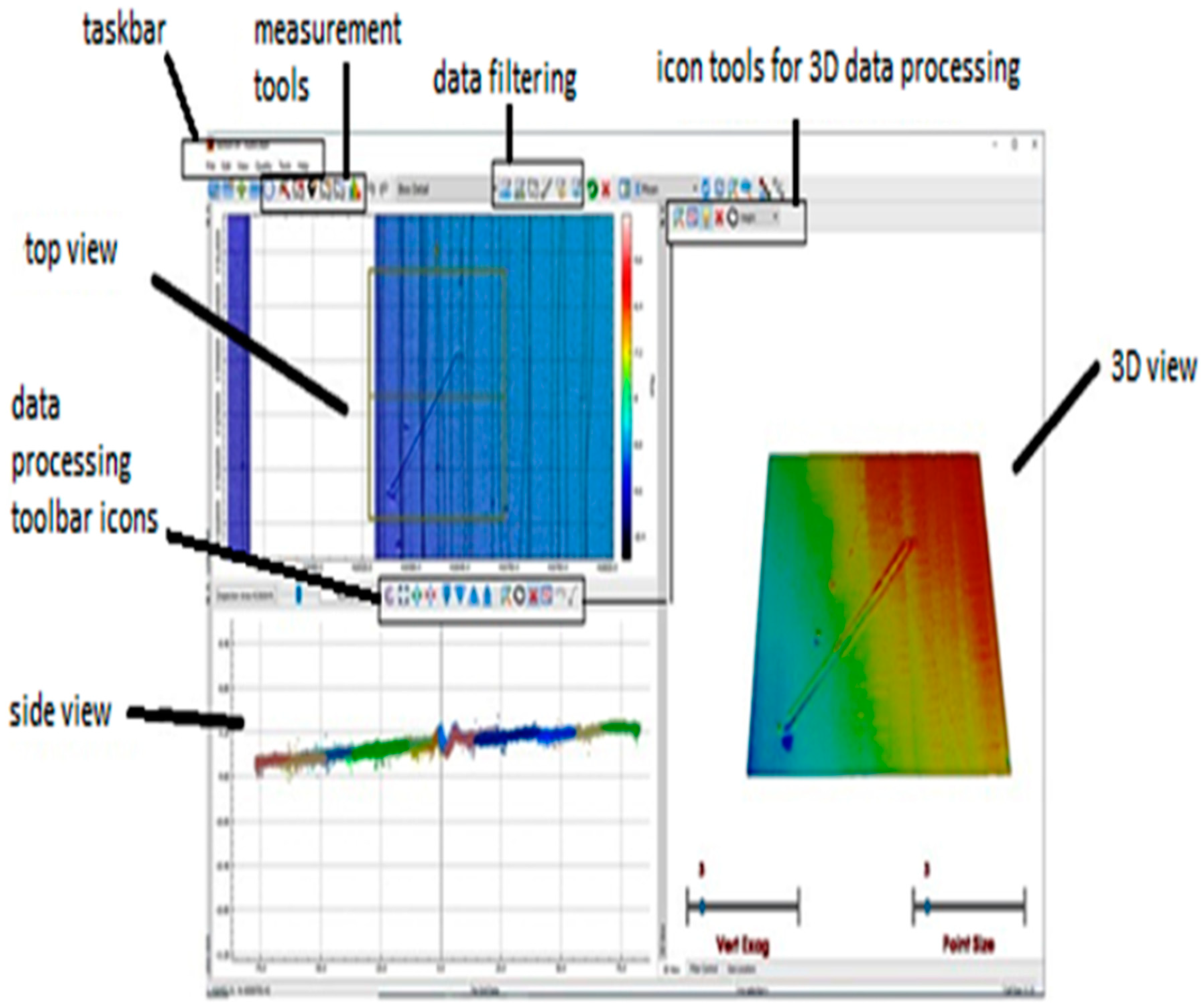
5.1. Methodology of Conducting and Analyzing Depth Surveys with Multibeam Echo Sounder
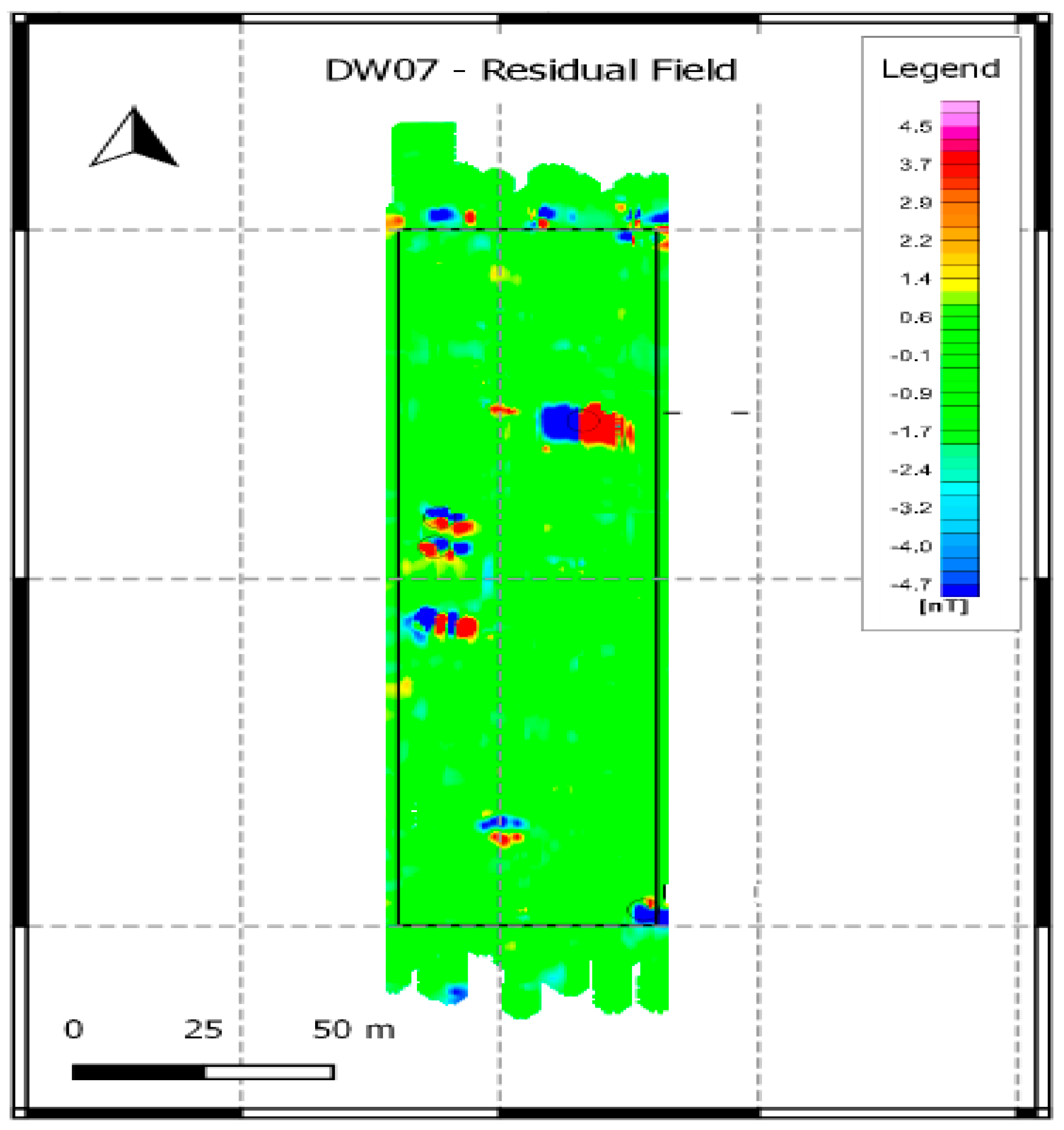
5.2. Methodology of Testing the Purity of the Bottom and Resting on the Bottom of the Magnetometer
5.3. Methodology of Conducting Underground Sediment Research Using Indirect (Subbottom Profiler) and Direct (Vibroprobe) Methods
6. Results
6.1. Analysis of the Scope of Seabed Research
6.2. Analysis of the Human and Equipment Resources Needed to Perform the Research
- -
- 7 days—measurements with the multibeam echo sounder (MBES)—using four measurement teams working in two shifts on two units;
- -
- 15 days—measurements with side sonar towed (SSS)—using two measurement teams working in two shifts on one unit;
- -
- 15 days—sub-bottom profiler (SBP) measurements—using two measurement teams working in two shifts on one unit
- -
- 17 days—magnetometer measurements—using two measurement teams working in two shifts on one unit;
- -
- 30 days—collection of Vibrocore seabed samples—using two measurement teams working in two shifts on one vessel;
- -
- 80 days—data processing—by 25 people involved in data post-processing working on one 12-h shift.
- -
- 15 days—removal of wrecks and other large elements—using two measurement teams working in two shifts on one unit;
- -
- 30 days—removal of boulders and stones—using two measurement teams working in two shifts on one unit;
- -
- 45 days—removal of probable mines/unexploded ordnance—using two measurement teams working in two shifts on one unit.
6.3. Hardware Resources
7. Applications
- -
- Preliminary design work consisting of the delineation of the wind farm site and the route of the underwater transmission line, taking into account ship traffic, sea currents, wind, tides, etc., as well as final design work consisting of the approval of the demarcated area and transmission route or a change of any of the factors due to too high costs of removing wrecks or an inconvenient route of the transmission line, cost EUR 2,016,000;
- -
- Research work consisting of a complete scan of the study area in order to obtain information about the depths of the water reservoir in the designated places, about potential objects at the bottom, about the dimensions of objects located on the bottom, about potentially dangerous objects exhibiting ferromagnetic properties, which may turn out to be unexploded ordnance or underwater mines, and about accurate soil sampling to check the tectonic stability of the soil and prevent overheating of the transmission line, the total cost is EUR 3,326,080;
- -
- Diving and further research work involving the removal of disturbing objects, boulders, stones, unexploded ordnance, wrecks, structures, etc. Total cost: EUR 2,146,500;
- -
- Construction works consist of piling foundations, embedding masts of wind turbines, installing nacelles, blades, and wind turbine accessories, laying and connecting transmission cables and transformers (both on land and on water), obtaining the necessary permits for commissioning the construction, and connecting the power plant to the network. Total cost: EUR 11,868,100;
- -
- The cost of research and diving equipment is EUR 611,000;
- -
- The costs of the measuring units were calculated as a flat rental, with fuel for each working day oscillating around EUR 400 per unit per day.
8. Summary
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Description | Labour—Number of People ** | Man-Hour | Daily Costs | Materials | Price | Equipment * | Price | Daily Total | Total * Days | Projected Number of Days | One-Time Cost |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1. | data analysis and design | 40 | 2800 € | 67,200 € | sea charts, flights | 500 € | - | = | 67,200 € | 2,016,000 € | 30 | 3000 € |
| environmental data | 2500 € | |||||||||||
| 2. | research | 91 | - | - | - | - | - | - | 82,920 € | 3,326,080 € | - | |
| 2.1 | MBES measurement | 16 | 960 € | 23,040 € | - | - | MBES x2 | 150,000 € | 23,840 € | 166,880 € | 7 | 150,000 € |
| ship x2 | 800 € | |||||||||||
| 2.2 | SSS measurement | 8 | 480 € | 11,520 € | - | - | SSS x1 | 100,000 | 11,920 € | 178,800 € | 15 | 100,000 € |
| ship x1 | 400 € | |||||||||||
| 2.3 | SBP measurement | 8 | 480 € | 11,520 € | - | - | SBP x1 | 55,000 € | 11,920 € | 178,800 € | 15 | 55,000 € |
| ship x1 | 400 € | |||||||||||
| 2.4 | magnetometric measurement | 10 | 600 € | 14,400 € | - | - | magnetometer x1 | 75,000 € | 14,800 € | 251,600 € | 17 | 75,000 € |
| ship x1 | 400 € | |||||||||||
| 2.5 | vibrocore samples | 24 | 1440 € | 34,560 € | - | - | ship x1 | 400 € | 2440 € | 1,110,000 € | 30 | - |
| vibro sounder excavator x1 | 600 € | |||||||||||
| 2.6 | data processing | 25 | 1500 € | 18,000 € | software x90 | 63,000 € | computer x30 | 45,000 € | 18,000 € | 1,440,000 € | 80 | 108,000 € |
| 3. | diving work | 54 | - | - | - | - | = | = | 84,360 € | 2,146,500 € | - | - |
| 3.1 | removal of wrecks | 30 | 1800 € | 43,200 € | - | - | tug x4 | 1300 € | 45,200 € | 678,000 € | 15 | - |
| crane on board x1 | 700 € | |||||||||||
| 3.2 | removal of stones | 12 | 720 € | 17,280 € | - | - | dredge x2 | 2300 € | 19,580 € | 587,400 € | 30 | - |
| 3.3 | removal of unexploded ordnance | 12 | 720 € | 17,280 € | containers for unexploded ordnance x20 | 70,000 € | dredge x2 | 2300 € | 19,580 € | 881,100 € | 45 | 120,000 € |
| winch on the ship x2 | 50,000 € | |||||||||||
| 4 | construction | 100 | - | - | - | - | - | - | 155,800 € | 11,868,100 € | - | - |
| 4.1 | piling of foundations | 24 | 1440 € | 34,560 € | connecting cylinders | 7000 € | drilling rig x1 | 400 € | 35,760 € | 3,218,400 € | 90 | 42,000,000 € |
| reinforcement so-called monopiles | 35,000 € | ship x2 | 800 € | |||||||||
| 4.2 | erecting masts | 24 | 1440 € | 34,560 € | mastx30 | 90,000 € | ship with crane x3 | 3000 € | 35,560 € | 3,380,400 € | 90 | 90,000,000 € |
| 4.3 | installation of gondolas and accessories | 24 | 1440 € | 34,560 € | carrycot + shovels + x30 attachments | 300,000,000 € | ship with crane x3 | 3000 € | 35,560 € | 3,380,400 € | 90 | 300,000,000 € |
| 4.4 | location of transmission cables | 12 | 720 € | 17,280 € | cablex393 | 19,530,000 € | dredge x2 | 2300 € | 19,580 € | 1,762,200 € | 90 | 19,530,000 € |
| 4.5 | transformer network setting | 12 | 720 € | 17,280 € | transformer plant x3 | 220,000 € | vessel with crane x2 | 2000 € | 19,280 € | 96,400 € | 5 | 220,000 € |
| 4.6 | network connection | 4 | 240 € | 5760 € | cost of permits and connections | 200,000 € | tools | 300 € | 6060 € | 30,300 € | 5 | 200,000 € |
| * for ships, dredgers and cranes, average operating and fuel costs per day (1 man/day). | labor cost | €19,356,680 | Total cost | 471,917,680 € | ||||||||
| ** in the case of humans, the cost of 1 man-hour. | cost of fittings | 608 000 PLN | ||||||||||
| * cable price approx. 80 $ per meter. | amount | €19,964,680 | ||||||||||
| ** Siemens Gamesa/SG 6.0–154/30 × 6 MW. | ||||||||||||
References
- Gutkowski, B.; Barmański, M.; Witoński, M. Possibilities of Offshore Energy Development in the Baltic Sea, “Czysta Energia”; 2009; No. 1. Available online: http://yadda.icm.edu.pl/baztech/element/bwmeta1.element.baztech-year-1643-126X-czysta_energia-2009 (accessed on 10 May 2023).
- Czyżak, P.; Sikorski, M.; Wrona, A. Wind in Your Sails. The 10H Principle and the Potential of Onshore Wind Energy in Poland; Instrat Policy Note 01/2021. 2021, p. 3. Available online: https://instrat.pl/wp-content/uploads/2021/05/Instrat-Wiatr-w-z%CC%87agle.pdf (accessed on 15 May 2023).
- Global Wind Energy Council. Capturing Green Recovery Opportunities from Wind Power in Developing Economies; Global Wind Energy Council: Brussels, Belgium, 2022; p. 11. [Google Scholar]
- Soliński, I.; Soliński, B.; Solińska, M. The role and significance of wind energy in the renewable energy sector. Polityka Energetyczna 2008, 11, 1. [Google Scholar]
- Bukowski, M.; Gąska, J.; Kosuń, M.; Śniegocki, A. The Impact of Wind Energy on the Polish Labour Market; Warsaw Institute of Economic Studies: Warsaw, Poland, 2015. [Google Scholar]
- McKinsey & Company. Development of Offshore Wind Energy in Poland. Prospects and Assessment of the Impact on the Local Economy; McKinsey & Company: New York, NY, USA, 2016. [Google Scholar]
- Streimikiene, D. Comparative Assessment of Energy Poverty in Baltic States and Visegrad Countries. Montenegrin J. Econ. 2023, 19, 185–194. [Google Scholar] [CrossRef]
- Streimikiene, D.; Mikalauskiene, A. Comparative assessment of renewable energy development in Baltic States. Montenegrin J. Econ. 2022, 17, 95–106. [Google Scholar] [CrossRef]
- Jones, S.L.; Petrel, A. Sub-Basin Marine Survey (GA0335/SOL5463) SubBottom Profiler Processing Report; Australian Ocean Data Network: Hobart, Australia, 2014. [Google Scholar]
- O’Kelly, B.; Arshad, M. Offshore wind turbine foundations–analysis and design. In Offshore Wind Farms; Elsevier: Amsterdam, The Netherlands, 2016; pp. 589–610. [Google Scholar]
- Štreimikienė, D. Externalities of power generation in Visegrad countries and their integration through support of renewables. Econ. Sociol. 2021, 14, 89–102. [Google Scholar] [CrossRef]
- Streimikiene, D. Renewable energy technologies in households: Challenges and low carbon energy transition justice. Econ. Sociol. 2022, 15, 108–120. [Google Scholar] [CrossRef]
- Streimikiene, D. Ranking of Baltic States on progress towards the main energy security goals of European energy union strategy. J. Int. Stud. 2020, 13, 24–37. [Google Scholar] [CrossRef]
- Musial, W.; Spitsen, P.; Beiter, P.; Duffy, P.; Marquis, M.; Cooperman, A.; Hammond, R.; Shields, M. Offshore Wind Market Report: 2021 Edition; Department of Energy: Washington, DC, USA, 2021.
- Da, Z.; Xiliang, Z.; Jiankun, H.; Qimin, C. Offshore wind energy development in China: Current status and future perspective. Renew. Sustain. Energy Rev. 2011, 15, 4673–4684. [Google Scholar] [CrossRef]
- Janekova, J.; Fabianova, J.; Rosova, A. Environmental and economic aspects in decision making of the investment project “wind park”. Pol. J. Manag. Stud. 2016, 13, 90–100. [Google Scholar] [CrossRef]
- Bayati, I.; Facchinetti, A.; Fontanella, A.; Giberti, H.; Belloli, M. A wind tunnel/HIL setup for integrated tests of Floating Offshore Wind Turbines. J. Phys. Conf. Ser. 2018, 1037, 052025. [Google Scholar] [CrossRef]
- Bayati, I.; Belloli, M.; Facchinetti, A.; Giberti, H. A 6DOF/Hil setup for wind tunnel hybrid tests on a 1/75 scale model of a 10 MW floating wind turbine. In Proceedings of the 23rd Conference of the Italian Association of Theoretical and Applied Mechanics, Salerno, Italy, 4–7 September 2017; Centro Servizi d’Ateneo Srl: Cagliari, Italy, 2017; Volume 4, pp. 611–624. [Google Scholar]
- Stewart, G.M.; Lackner, M.A.; Robertson, A.; Jonkman, J.; Goupee, A.J. Calibration and validation of a FAST floating wind turbine model of the DeepCwind scaled tension-leg platform. In Proceedings of the 22nd International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012. [Google Scholar]
- Jasińska-Biliczak, A. Smart-City Citizen Engagement: The Answer to Energy Savings in an Economic Crisis? Energies 2022, 15, 8828. [Google Scholar] [CrossRef]
- Androniceanu, A.; Georgescu, I.; Dobrin, C.; Dragulanescu, I.V. Multifactorial components analysis of the renewable energy sector in the oecd countries and managerial implications. Pol. J. Manag. Stud. 2020, 22, 36–49. [Google Scholar] [CrossRef]
- Choe, D.E.; Kim, H.C.; Kim, M.H. Sequence-based modeling of deep learning with LSTM and GRU networks for structural damage detection of floating offshore wind turbine blades. Renew. Energy 2021, 174, 218–235. [Google Scholar] [CrossRef]
- Chen, H.; Liu, H.; Chu, X.; Liu, Q.; Xue, D. Anomaly detection and critical SCADA parameters identification for wind turbines based on LSTM-AE neural network. Renew. Energy 2021, 172, 829–840. [Google Scholar] [CrossRef]
- IEC 61400-3-1:2019; Design Requirements for Offshore Wind Turbines. International Electrotechnical Commission: Geneva, Switzerland, 2009.
- Korovkin, K.; Dulebenets, E.; Bezrukovs, M.; Zikmanis, A.; Blumberga, J. Techno-economic assessment of offshore wind energy development in the Baltic Sea. Renew. Energy 2022, 184, 711–722. [Google Scholar] [CrossRef]
- Zikmanis, A.; Bezrukovs, M.; Korovkin, K.; Blumberga, J. Assessing the environmental impact of offshore wind energy in the Baltic Sea. J. Environ. Manag. 2021, 298, 113558. [Google Scholar] [CrossRef]
- Shafiei, A.; Fuso Nerini, F.; Möller, T. Power-to-gas energy storage for offshore wind farms in the Baltic Sea. J. Energy Storage 2022, 47, 103367. [Google Scholar]
- Jiménez-Arroyo, M.P.; Ortigueira, M.P.; Burgos-Montes, J.C. The potential of floating wind energy in the Baltic Sea. J. Renew. Sustain. Energy 2022, 14, 054704. [Google Scholar] [CrossRef]
- Bezrukovs, M.; Korovkin, K.; Zikmanis, A.; Blumberga, J. Socio-economic impacts of offshore wind energy development in the Baltic Sea. Energy Policy 2022, 161, 163–173. [Google Scholar]
- Jonkman, J.M. Dynamics of offshore floating wind turbines—Model development and verification. Wind. Energy Int. J. Prog. Appl. Wind. Power Convers. Technol. 2009, 12, 459–492. [Google Scholar] [CrossRef]
- Barooni, M.; Ali, N.A.; Ashuri, T. An open-source comprehensive numerical model for dynamic response and loads analysis of floating offshore wind turbines. Energy 2018, 154, 442–454. [Google Scholar] [CrossRef]
- Johlas, H.M.; Martínez-Tossas, L.A.; Churchfield, M.J.; Lackner, M.A.; Schmidt, D.P. Floating platform effects on power generation in spar and semisubmersible wind turbines. Wind Energy 2021, 24, 901–916. [Google Scholar] [CrossRef]
- Grządel, A. Single-beam sonar in hydrographic measurements. Prz. Mor. 2006, 4, 11–28. Available online: https://scholar.google.pl/scholar?hl=pl&as_sdt=0,5&cluster=14351008529271935887 (accessed on 15 May 2023).
- Shah, K.A.; Meng, F.; Li, Y.; Nagamune, R.; Zhou, Y.; Rhine, Z.; Jiang, Z. A synthesis of feasible control methods for floating offshore wind turbine system dynamics. Renew. Sustain. Energy Rev. 2021, 151, 111525. [Google Scholar] [CrossRef]
- Grządel, A.; Nowak, D.; Snake, M. Detection and Location of Underwater Objects with Side Sonar as an Element of Navigation Safety Buses: Technology, Operation, Transport Systems, No 1/2017. pp. 42–47. Available online: http://yadda.icm.edu.pl/baztech/element/bwmeta1.element.baztech-f21758d0-3e0d-4f67-bb6e-af272297fac1 (accessed on 15 May 2023).
- Kim, B.; Yu, S.C. Imaging sonar based real-time underwater object detection utilizing AdaBoost method. In Proceedings of the 2017 IEEE Underwater Technology (UT), Busan, Republic of Korea, 21–24 February 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Valdenegro, M. Object recognition in forward-looking sonar images with Convolutional Neural Networks. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Rajkoomar, M.; Marimuthu, F.; Naicker, N.; Mvunabandi, J.D. A meta-analysis of the economic impact of carbon emissions in Africa. Environ. Econ. 2022, 13, 89–100. [Google Scholar] [CrossRef]
- Uijlings, J.; Sande, K.; Gevers, T.; Smeulders, A. Selective Search for Object Recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Liljeback, P.; Haugstuen, I.U.; Pettersen, K.Y. Path following control of planar snake robots using a cascaded approach. IEEE Trans. Control. Syst. Technol. 2012, 20, 111–126. [Google Scholar]
- Zhang, G.Q.; Zhang, X.K. Concise robust adaptive pathfollowing control of underactuated ships using DSC and MLP. IEEE J. Ocean. Eng. 2014, 39, 685–694. [Google Scholar] [CrossRef]
- McKay, J.; Gerg, I.; Monga, V.; Raj, R. What’s Mine is Yours: Pretrained CNNs for Limited Training Sonar ATR. In Proceedings of the OCEANS 2017—Anchorage, Anchorage, AK, USA, 18–21 September 2017. [Google Scholar]
- Alshalali, T.; Josyula, D. Fine-Tuning of Pre-Trained Deep Learning Models with Extreme Learning Machine. In Proceedings of the 2018 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 12–14 December 2018; pp. 469–473. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A. SSD: Single Shot MultiBox Detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Cham, Swizerland, 2016; Volume 9905, pp. 21–37. [Google Scholar]
- Hu, G.; Wang, K.; Peng, Y.; Qiu, M.; Shi, J.; Liu, L. Deep Learning Methods for Underwater Target Feature Extraction and Recognition. Comput. Intell. Neurosci. 2018, 2018, 1214301. [Google Scholar] [CrossRef]
- Cubuk, E.D.; Zoph, B.; Mane, D.; Vasudevan, V.; Le, Q.V. AutoAugment: Learning Augmentation Policies from Data. arXiv 2018, arXiv:1805.09501. [Google Scholar]
- Tontini, F.C.; Carmisciano, C.; Ciminale, M.; Grassi, M.; Lusiani, P.; Monti, S.; Stefanelli, P. High resolution Marine magneticsurveys for searching underwater cultural resources. Ann. Geophys. 2006, 49, 1167–1168. [Google Scholar]
- Brzezińska, A.; Cichowska, D.; Gajewski, Ł.; Konieczny, W.; Kubacka, M.; Nowak, J. Report on Marine Magnetometric Measurements in the Gdańsk Deep Region; Department of Operational Oceanography, Maritime Institute in Gdańsk: Gdańsk, Poland, 2012. [Google Scholar]
- Müller, S.; Wunderlich, J.; Hümbs, P.; Erdmann, S. High-Resolution Sub- Bottom Profiling for the “Shallow Survey” Common Data Set using the Parametric Echosounder SES-2000. In Proceedings of the Shallow Survey 2005 4th International Conference, Plymouth, UK, 12–15 September 2005; pp. 1–4. [Google Scholar]
- Sohn, S.I.; Oh, J.H.; Lee, Y.S. Design of a full-cellpowered catamaran-type unmanned surface vehicle. IEEE J. Ocean. Eng. 2015, 40, 388–396. [Google Scholar] [CrossRef]
- Li, J.H.; Lee, P.M.; Jun, B.H.; Lim, Y.K. Point-to-point navigation of underactuated ships. Automatica 2008, 44, 3201–3205. [Google Scholar] [CrossRef]
- Xu, H.T.; Soares, C.G. Vector field path following for surface marine vessel and parameter identification based on LS-SVM. Ocean. Eng. 2016, 113, 151–161. [Google Scholar] [CrossRef]
- Perera, A.D.; Gunathilaka, M.D.E.K. Rapid Assessment Survey Using Side Scan Sonar: International Obligations and Role of Hydrography in Ensuring Safety of Navigation–Case Study of the Aftermath of MV X-Press Pearl Incident. J. Geospat. Surv. 2022, 2, 7–10. [Google Scholar] [CrossRef]
- Davis, K.J.; Vianna, G.M.S.; Meeuwig, J.J.; Meekan, M.; Pannell, D. Estimating the economic benefits and costs of highly-protected marine protected areas. Ecosphere 2019, 10, e02879. [Google Scholar] [CrossRef]
- Medeiros, P.R.; Souza, A.T.; Ilarri, M.I. Habitat use and behavioral ecology of the juveniles of two sympatric damselfishes (Actinopterygii: Pomacentridae) in the south-western Atlantic Ocean. J. Fish Biol. 2010, 77, 1599–1615. [Google Scholar] [CrossRef] [PubMed]
- Zoph, B.; Cubuk, E.D.; Ghiasi, G.; Lin, T.Y.; Shlens, J.; Le, Q.V. Learning Data Augmentation Strategies for Object Detection. arXiv 2019, arXiv:1906.11172. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Banaszak, C.; Gawlik, A.; Szcześniak, P.; Rabe, M.; Widera, K.; Bilan, Y.; Łopatka, A.; Gutowska, E. Economic and Energy Analysis of the Construction of a Wind Farm with Infrastructure in the Baltic Sea. Energies 2023, 16, 6088. https://doi.org/10.3390/en16166088
Banaszak C, Gawlik A, Szcześniak P, Rabe M, Widera K, Bilan Y, Łopatka A, Gutowska E. Economic and Energy Analysis of the Construction of a Wind Farm with Infrastructure in the Baltic Sea. Energies. 2023; 16(16):6088. https://doi.org/10.3390/en16166088
Chicago/Turabian StyleBanaszak, Cezary, Andrzej Gawlik, Paweł Szcześniak, Marcin Rabe, Katarzyna Widera, Yuriy Bilan, Agnieszka Łopatka, and Ewelina Gutowska. 2023. "Economic and Energy Analysis of the Construction of a Wind Farm with Infrastructure in the Baltic Sea" Energies 16, no. 16: 6088. https://doi.org/10.3390/en16166088