

Supplementary Control of Conventional Coordinated Control for 1000 MW Ultra-Supercritical Thermal Power Plant Using One-Step Ahead Control


Abstract
:1. Introduction
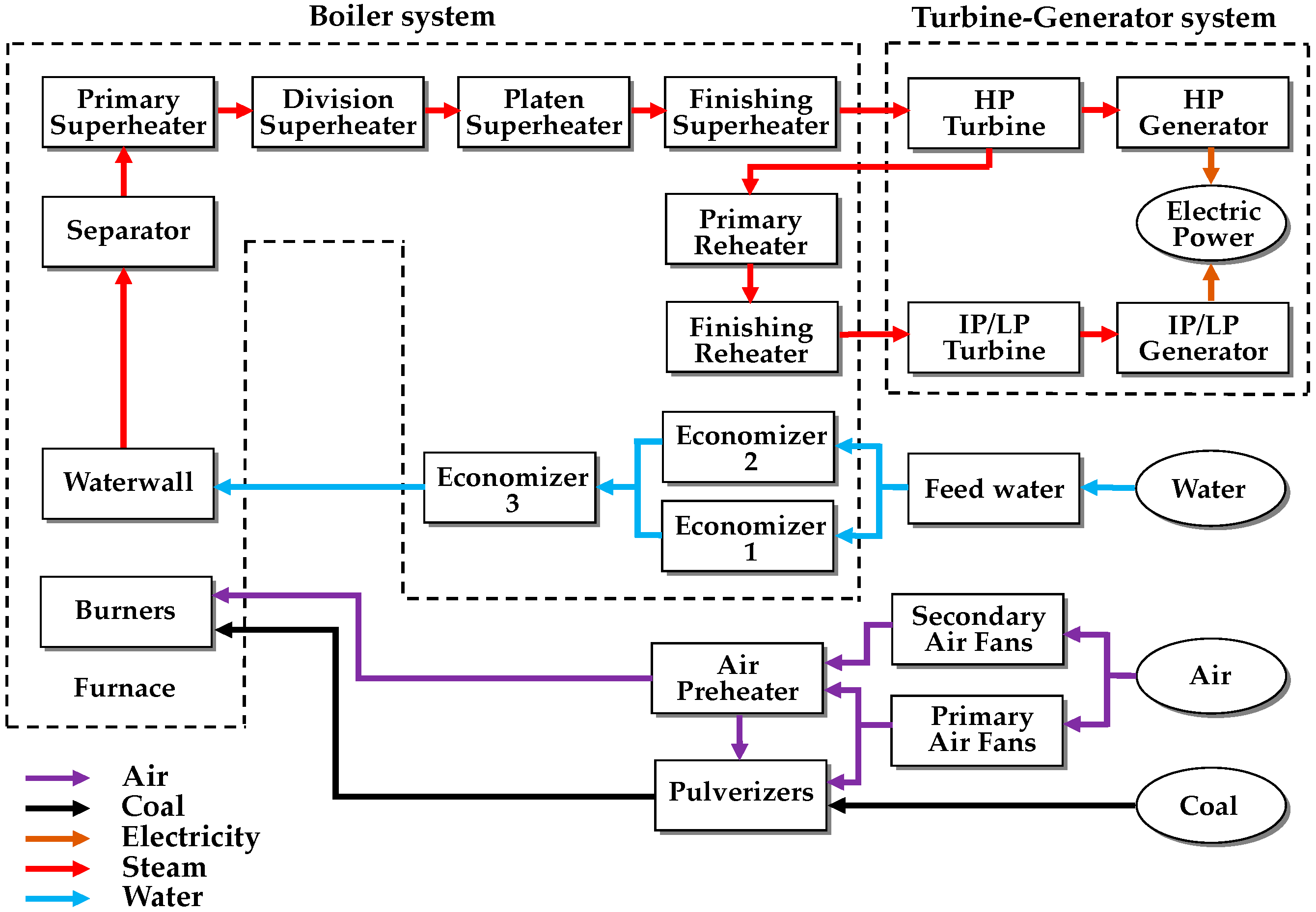
2. 1000 MW Ultra-Supercritical Once-Through Power Plant
3. Conventional and Proposed Boiler Combustion Control System
3.1. Conventional Boiler Combustion System in Coordinated Control
3.2. Proposed Supplementary Control Structure
4. Application to 1000 MW Ultra-Supercritical Once-Through Power Plant
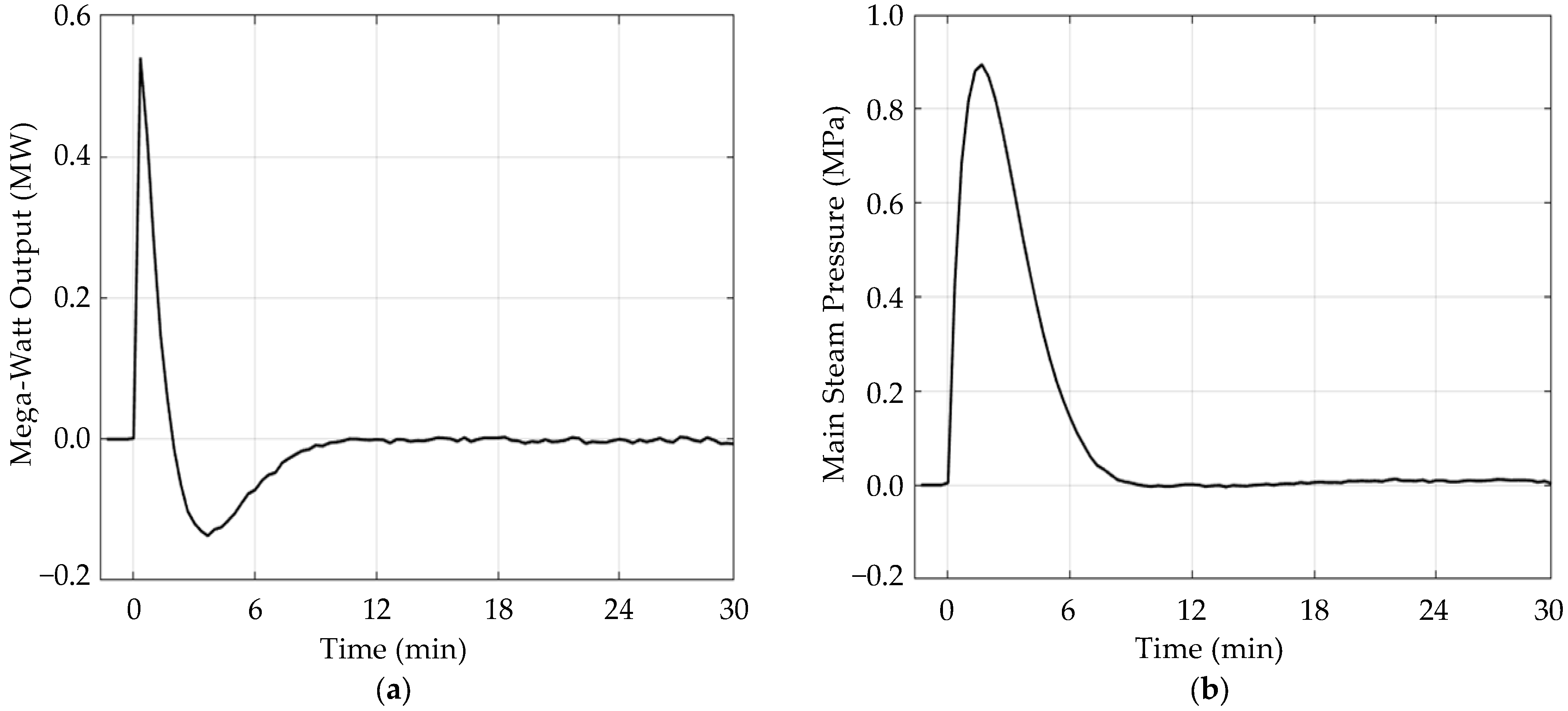
4.1. Obtaining Step Response Data
4.2. Development of the Discrete Prediction Model
4.3. One-Step Ahead Controller Design
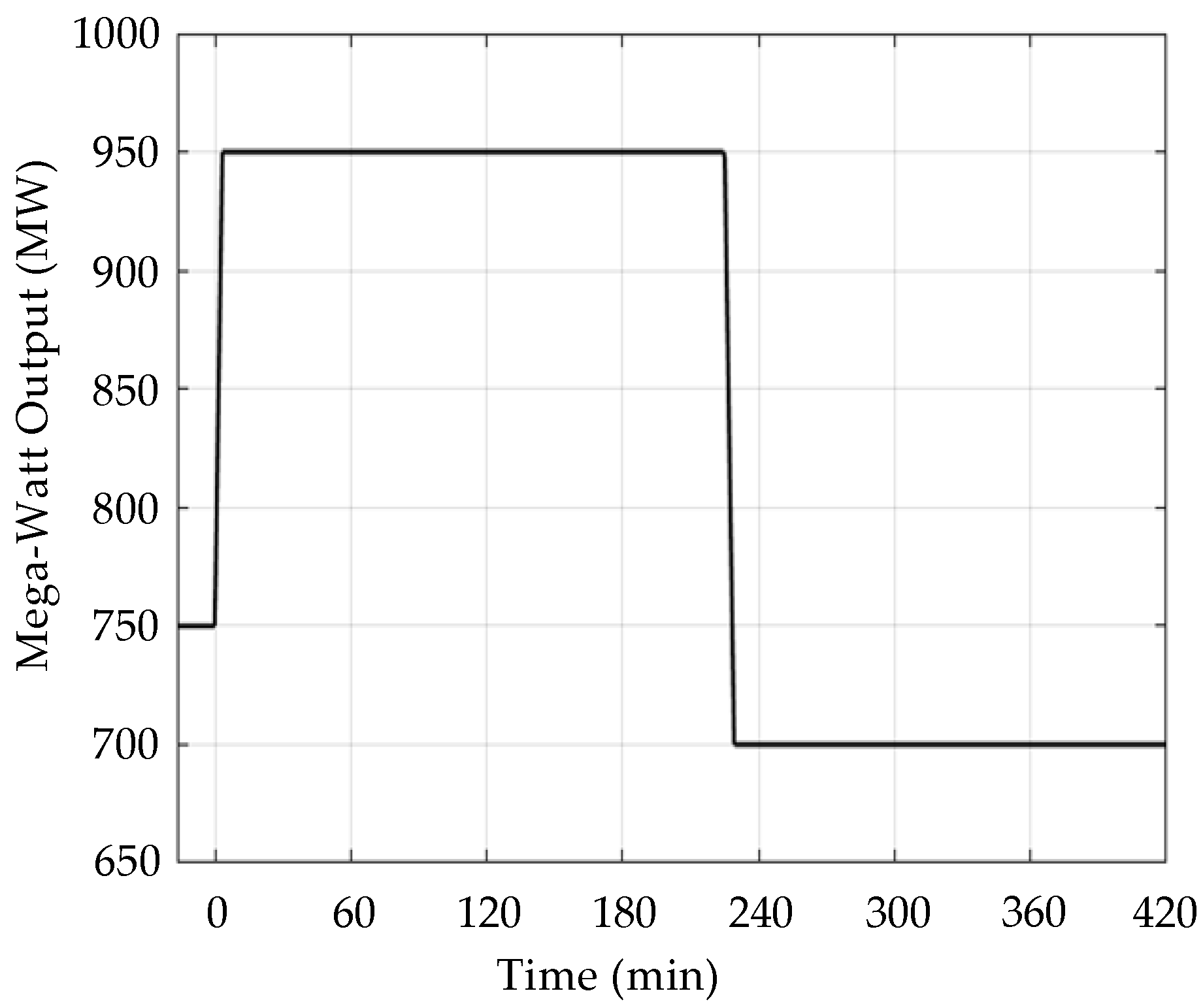
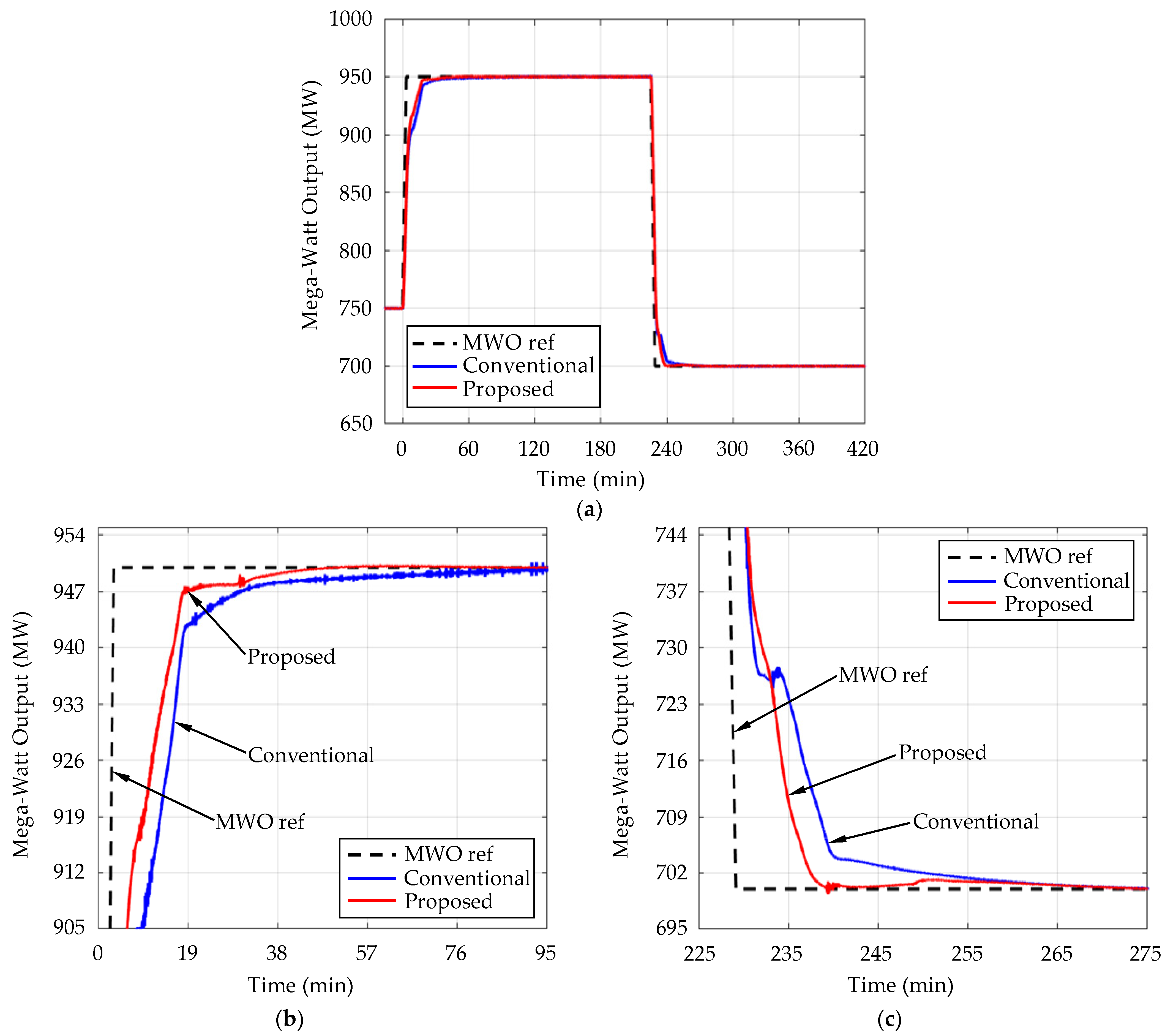
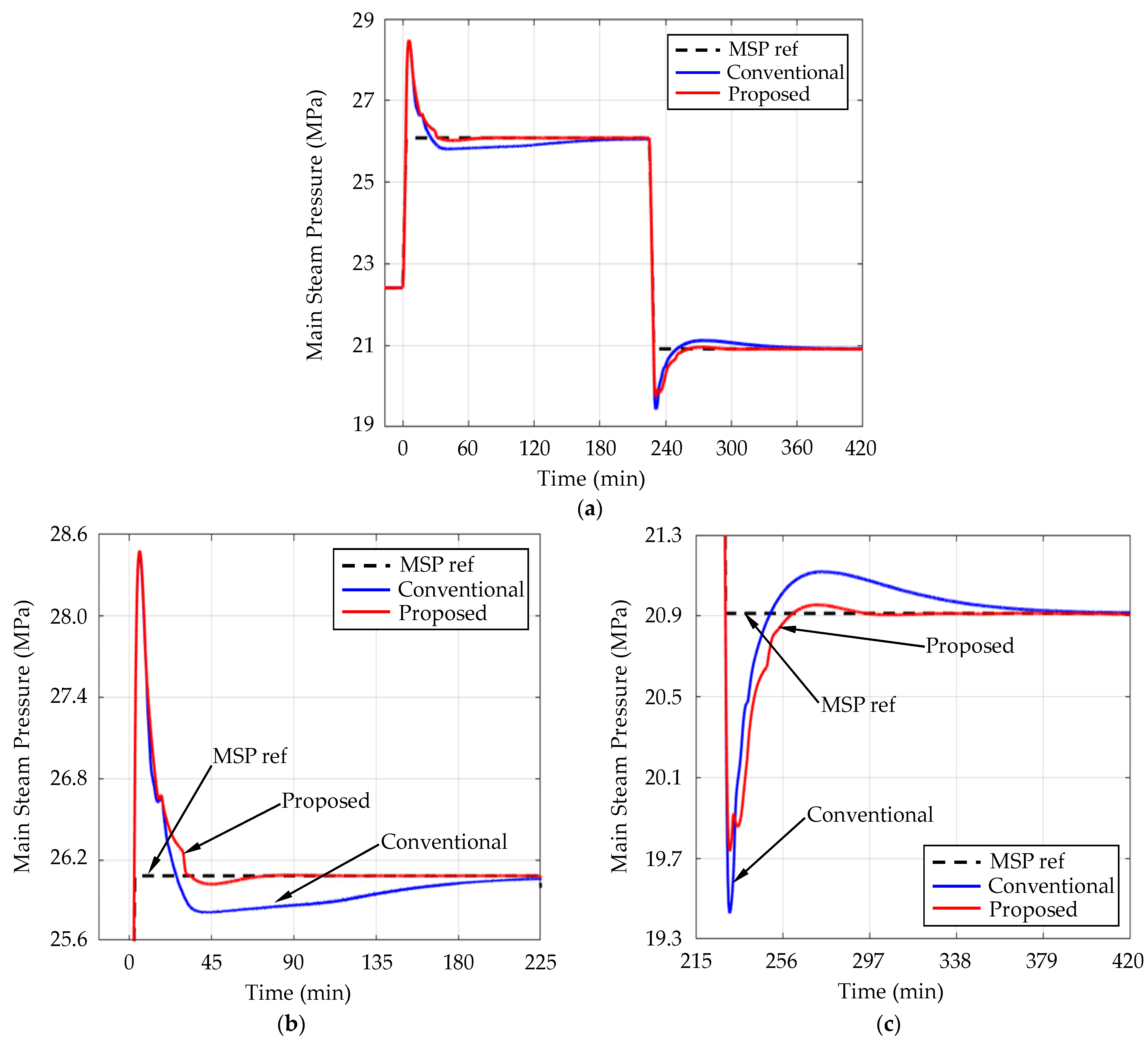
5. Simulation Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mlilo, N.; Brown, J.; Ahfock, T. Impact of intermittent renewable energy generation penetration on the power system networks—A review. Technol. Econ. Smart G. 2021, 6, 25. [Google Scholar] [CrossRef]
- Mokeke, S.; Thamae, L.Z. The impact of intermittent renewable energy generators on Lesotho national electricity grid. Electr. Pow. Syst. Res. 2021, 196, 107196. [Google Scholar] [CrossRef]
- Flynn, D.; Institution of Electrical Engineers. Thermal Power Plant Simulation and Control; Institution of Electrical Engineers: London, UK, 2003. [Google Scholar]
- Tan, W.; Liu, J.; Fang, F.; Chen, Y. Tuning of PID controllers for boiler-turbine units. ISA Trans. 2004, 43, 571–583. [Google Scholar] [CrossRef] [PubMed]
- Arastou, A.; Rabieyan, H.; Karrari, M. Inclusive modelling and parameter estimation of a steam power plant using an LMI-based unknown input reconstruction algorithm. IET Gener. Transm. Distrib. 2022, 16, 1425–1437. [Google Scholar] [CrossRef]
- Sayed, M.; Gharghory, S.M.; Kamal, H.A. Gain tuning PI controllers for boiler turbine unit using a new hybrid jump PSO. J. Electr. Syst. Inf. Technol. 2015, 2, 99–110. [Google Scholar] [CrossRef]
- Ma, L.; Lee, K.Y.; Wang, Z. Intelligent coordinated controller design for a 600 MW supercritical boiler unit based on expanded-structure neural network inverse models. Control Eng. Pract. 2016, 53, 194–201. [Google Scholar] [CrossRef]
- Gao, Y.; Zeng, D.; Ping, B.; Zhang, L.; Liu, J. Research on coordinated control system of drum boiler units considering energy demand decoupling. Control Eng. Pract. 2020, 102, 104562. [Google Scholar] [CrossRef]
- Lee, Y.; Yoo, E.; Lee, T.; Moon, U.C. Supplementary Control of Conventional Coordinated Control for 1000 MW Ultra-supercritical Thermal Power Plant using Dynamic Matrix Control. J. Electr. Eng. Technol. 2018, 13, 97–104. [Google Scholar]
- Fadali, M.S.; Visioli, A. Digital Control Engineering: Analysis and Design, 2nd ed.; Academic Press: Waltham, MA, USA, 2013. [Google Scholar]
- Xi, C.; Liuping, W. Discrete-time one-step ahead prediction control (DOPC) of a Quadcopter UAV with constraints. In Proceedings of the 2016 Australian Control Conference (AuCC), Newcastle, Australia, 3–4 November 2016. [Google Scholar]
- Xiao, Z.; Meng, S.; Lu, N.; Malik, O.P. One-Step-Ahead Predictive Control for Hydroturbine Governor. Math. Probl. Eng. 2015, 2015, 382954. [Google Scholar] [CrossRef]
- Dadone, A.; Dambrosio, L.; Fortunato, B. One step ahead adaptive control technique for wind systems. Energy Conv. Manag. 1998, 39, 399–413. [Google Scholar] [CrossRef]
- Somova, E.V.; Tugov, A.N.; Tumanovskii, A.G. Modern Coal-Fired Power Units for Ultra-Supercritical Steam Conditions (Review). Therm. Eng. 2023, 70, 81–96. [Google Scholar] [CrossRef]
- Cheng, C.; Peng, C.; Zeng, D.; Gang, Y.; Mi, H. An Improved Neuro-fuzzy Generalized Predictive Control of Ultra-supercritical Power Plant. Cogn. Comput. 2021, 13, 1556–1563. [Google Scholar] [CrossRef]
- Rocha, D.H.D.; Silva, R.J. Exergoenvironmental analysis of a ultra-supercritical coal-fired power plant. J. Clean. Prod. 2019, 231, 671–682. [Google Scholar] [CrossRef]
- Liu, X.J.; Kong, X.B.; Hou, G.L.; Wang, J.H. Modeling of a 1000 MW power plant ultra super-critical boiler system using fuzzy-neural network methods. Energy Convers. Manag. 2013, 65, 518–527. [Google Scholar] [CrossRef]
- Zhu, H.; Tan, P.; He, Z.; Zhang, C.; Fang, Q.; Chen, G. Nonlinear model predictive control of USC boiler-turbine power units in flexible operations via input convex neural network. Energy 2022, 255, 124486. [Google Scholar] [CrossRef]
- Dukelow, S.G.; Instrument Society of America. The Control of Boilers; Instrument Society of America: Research Triangle Park, NC, USA, 1986. [Google Scholar]
- Lee, K.; Jeong, K.; Jeon, W.; Bae, Y.; Lee, D. Development of APESS software for power plant simulation. In Proceedings of the ASME 2010 Pressure Vessels and Piping Conference, Washington, DC, USA, 18–22 July 2010. [Google Scholar]
- Zambrano, J.; Sanchis, J.; Herrero, J.M.; Martínez, M. WH-MOEA: A Multi-Objective Evolutionary Algorithm for Wiener-Hammerstein System Identification. A Novel Approach for Trade-Off Analysis Between Complexity and Accuracy. IEEE Access 2020, 8, 228655–228674. [Google Scholar] [CrossRef]
- Aström, K.J.; Wittenmark, B.R. Computer-Controlled Systems: Theory and Design, 3rd ed.; Dover Publications: Mineola, NY, USA, 2011. [Google Scholar]
- Moon, U.C.; Lee, K.Y. Step-Response Model Development for Dynamic Matrix Control of a Drum-Type Boiler–Turbine System. IEEE Trans. Energy Convers. 2009, 24, 423–430. [Google Scholar] [CrossRef]
- Gonzalez-Salazar, M.A.; Kirsten, T.; Prchlik, L. Review of the operational flexibility and emissions of gas- and coal-fired power plants in a future with growing renewables. Renew. Sust. Energ. Rev. 2018, 82, 1497–1513. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameter | MWO | MSP |
|---|---|---|
| 1.1631 | 1.1908 | |
| 0.2096 | −0.0991 | |
| −0.4868 | −0.0428 | |
| 0.0603 | −0.1113 | |
| 0.5394 | 0.4234 | |
| −0.7389 | −0.2490 | |
| −0.1363 | −0.1308 | |
| 0.3356 | −0.0434 |
| MWO (MW) | MSP (MPa) |
|---|---|
| 750 | 22.409 |
| 950 | 26.084 |
| 700 | 20.9135 |
| Performance | First Step Change | Second Step Change |
|---|---|---|
| Sum of squared error | 78.23% | 94.89% |
| Settling time | 64.09% | 79.15% |
| Performance | First Step Change | Second Step Change |
|---|---|---|
| Sum of squared error | 93.37% | 94.66% |
| Settling time | 17.59% | 29.39% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, H.; Choi, Y.; Moon, U.-C.; Lee, K.Y. Supplementary Control of Conventional Coordinated Control for 1000 MW Ultra-Supercritical Thermal Power Plant Using One-Step Ahead Control. Energies 2023, 16, 6197. https://doi.org/10.3390/en16176197
Choi H, Choi Y, Moon U-C, Lee KY. Supplementary Control of Conventional Coordinated Control for 1000 MW Ultra-Supercritical Thermal Power Plant Using One-Step Ahead Control. Energies. 2023; 16(17):6197. https://doi.org/10.3390/en16176197
Chicago/Turabian StyleChoi, Hyuk, Yeongseok Choi, Un-Chul Moon, and Kwang Y. Lee. 2023. "Supplementary Control of Conventional Coordinated Control for 1000 MW Ultra-Supercritical Thermal Power Plant Using One-Step Ahead Control" Energies 16, no. 17: 6197. https://doi.org/10.3390/en16176197