2.1. Machine Topologies
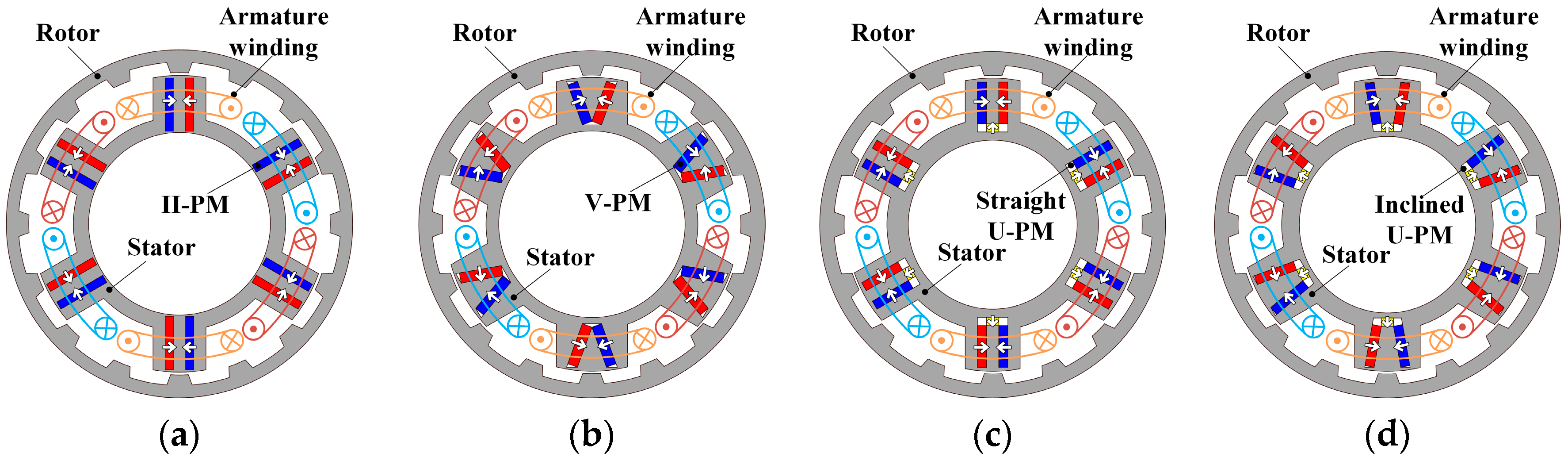
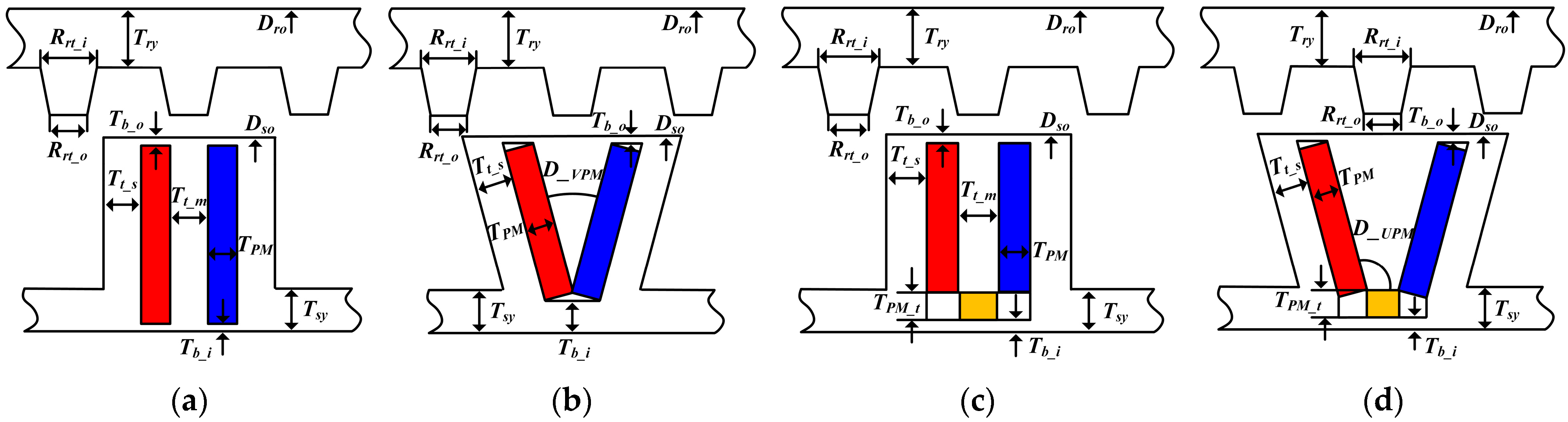
Figure 1 illustrates the topologies of the OR CP-FSPM machines, including the II-PM, V-PM, SU-PM, and IU-PM machines. A salient pole OR design is adopted in CP-FSPM machines, which is absent of windings and PMs. The armature winding coils and PM segments are placed on the stator. The following figures illustrate PM segments in blue, red, and yellow, with segments sharing the same magnetization direction being colored the same. The direction of magnetization is indicated by arrows. Additionally, different colors are used to represent the armature winding coils associated with different phases.
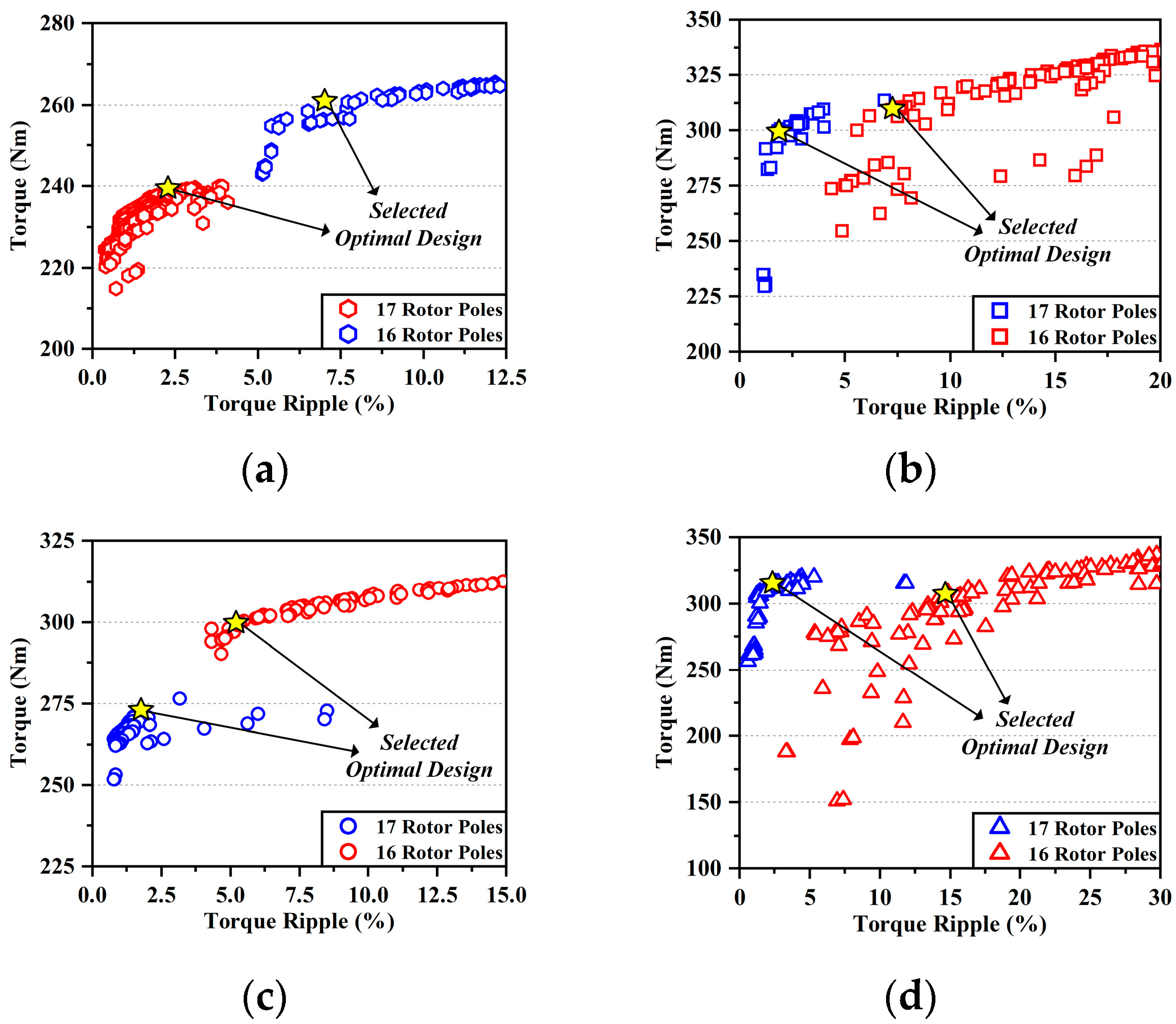
The CP-FSPM machines investigated in this study have six stator slots. In the meantime, machines with 16 (6/16) or 17 (6/17) rotor poles are notable due to the high open-circuit back EMFs and torque densities. On the one hand, concentrated winding (CW) with a high power factor can be applied in 6/16 machines to obtain short end-winding. However, the torque ripple is generally high in even-order rotor pole number machines. On the other hand, distributed winding (DW) is employed in 6/17 machines to achieve a low torque ripple while maintaining a high winding factor. In the following sections, both 6/16 and 6/17 machines are optimized and compared.
A flux-focusing PM array is located on each stator tooth of the CP-FSPM machines, and each array has the same polarity. As shown in
Figure 1, the II-PM and V-PM array are formed of two PM segments, while the SU-PM and IU-PM machines are formed of three segments. The IU-PM machine is proposed by combining the features of the V-PM and SU-PM machines to improve the flux-focusing effect, as shown in
Figure 1d.
Table 1 provides the design parameters. The outer diameter and active stack length of CP-FSPM ma-chines are selected as 340 mm and 80 mm, respectively. The disk-like shape of the ma-chine is suitable for in-wheel applications.
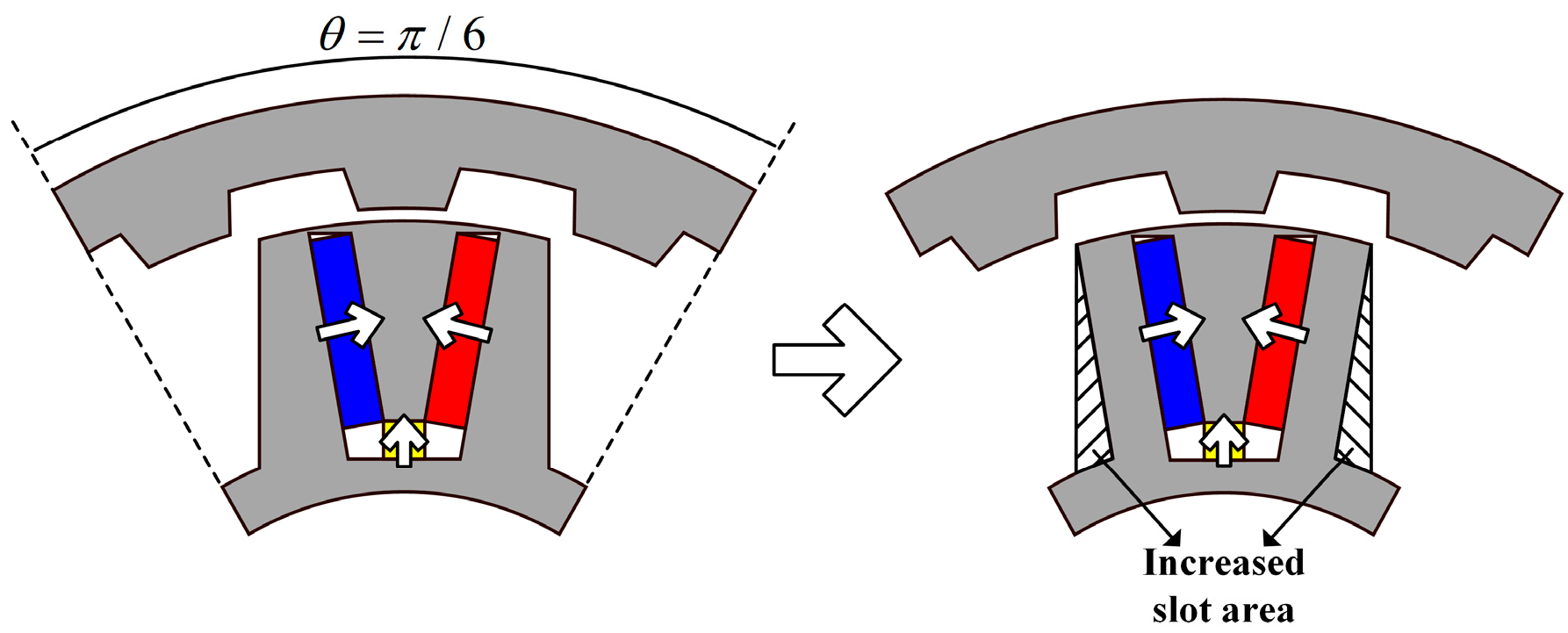
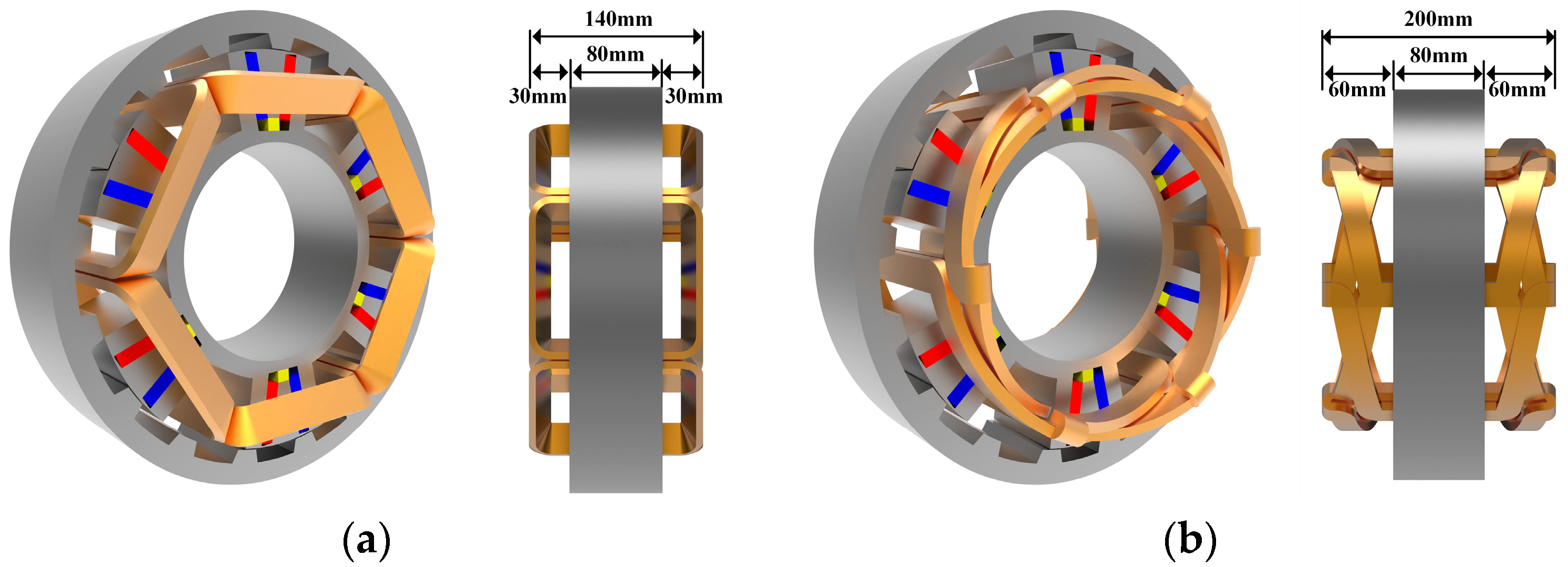
However, the parallel stator tooth design of the IU-PM machine leads to insufficient usage of the stator slot area. Therefore, an unparallel tooth design is adopted, inspired by [
13]. As shown in
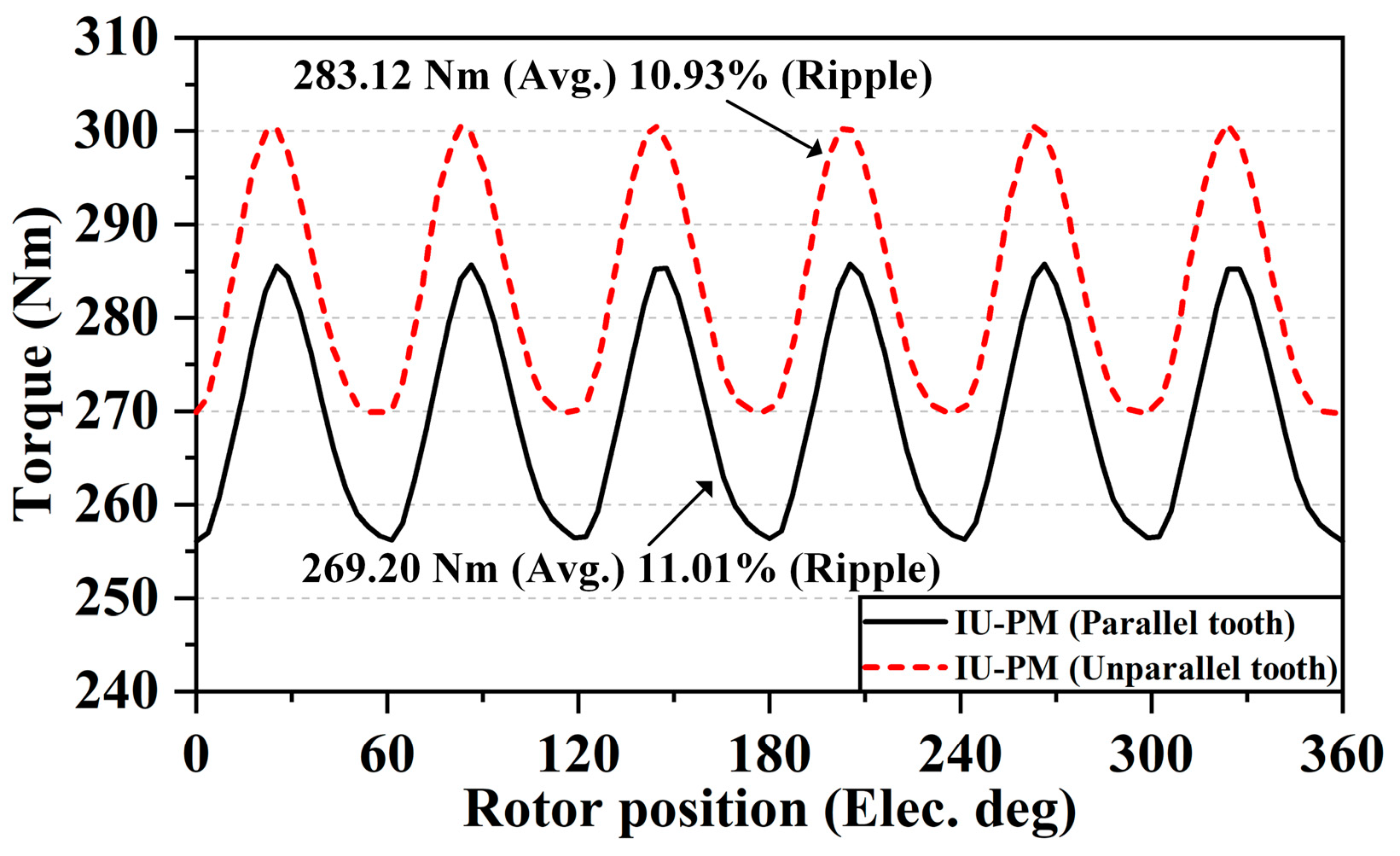
Figure 2, the edges of the stator tooth are inclined to the same angle as the PM segments in the modified design, which increases the slot area without influencing the flow of the magnetic flux circuit. By adopting the improved stator topology, the slot area of the inclined U-PM machine can increase by approximately 10%. In order to explicitly showcase the merit of the unparallel stator tooth design, 6/17 inclined U-PM machines with two types of stator topologies are optimized and compared with a current density of 4 A/mm
2. As shown in
Figure 3, the average torque is improved by 5.17% after modifying the stator topology, although the torque ripple is increased as well. Furthermore, this unparallel stator tooth design is also employed in the V-PM machine.
2.2. Working Principle of CP-FSPM Machines
As one type of stator PM machine, the CP-FSPM machines operate based on the flux modulation effect. This section investigates the machine working principle using a semi-analytical model. The multiple working harmonics of air gap flux density are identified, and the contributions of various harmonics to the open-circuit back EMF are quantitatively analyzed.
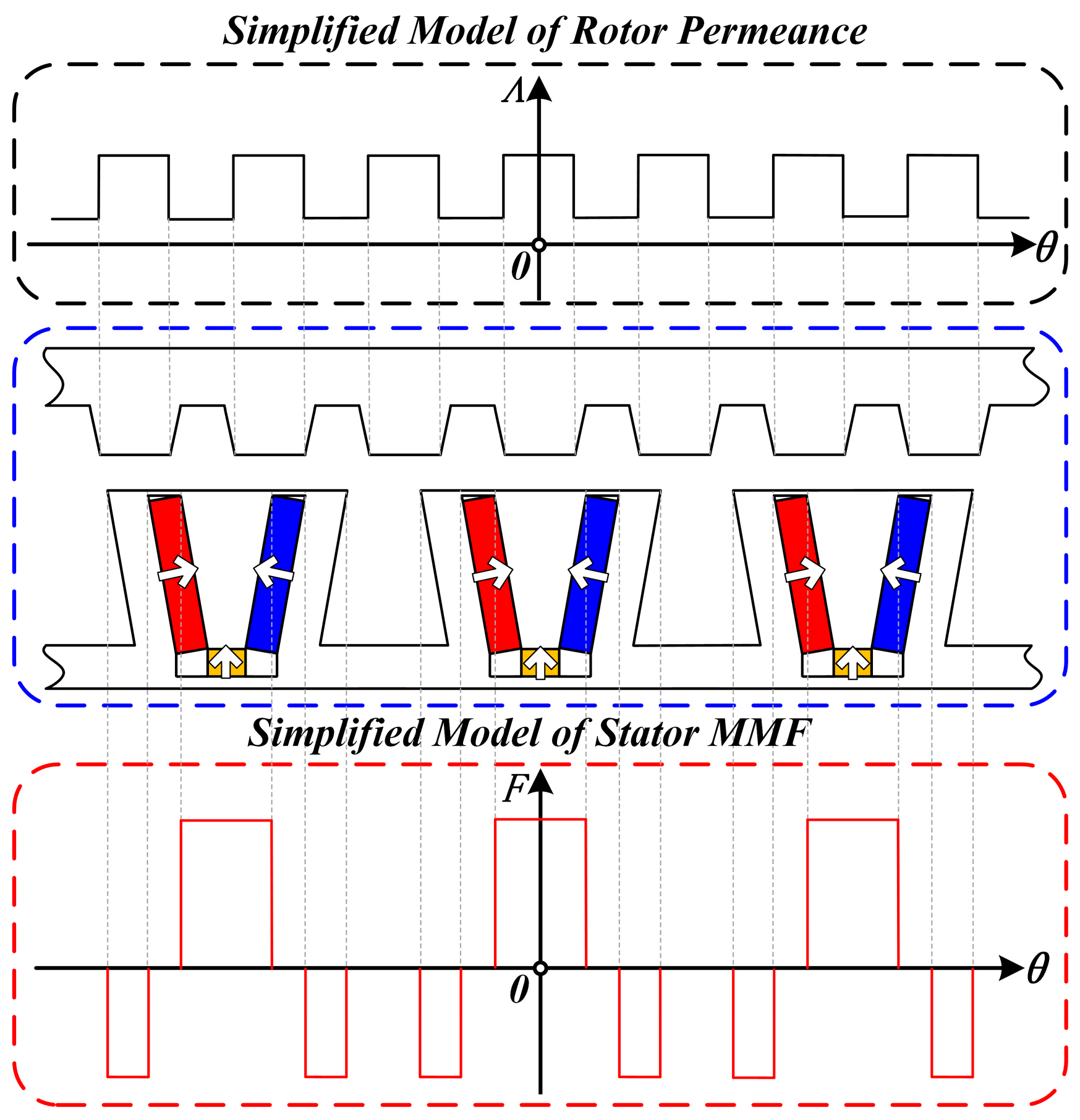
In an open-circuit condition, the simplified models of the rotor permeance model and the stator PM excited MMF are depicted in
Figure 4. The distribution of rotor permeance exhibits an uneven distribution at the air gap side due to the salient pole structure, modulating the stator MMF to generate various harmonics of air gap flux density. The equivalent stator MMF, considering the PM excitation and the modulation effect of stator teeth, is a periodic function [
15], which can be denoted by
where
Fsi is the
i th-order MMF harmonic amplitude, and
Ps is the fundamental PM MMF order, which is equal to the stator slot number in CP-FSPM machines.
As shown in
Figure 4, the permeance model of the salient pole rotor is periodically distributed, which provides the essential flux modulation ability. The rotor permeance function is expressed as
where
L0 is the average permeance value, and Λ
j is the
j th-order harmonic amplitude. In addition,
Nr is the number of rotor poles, and
ωr is the rotor angular speed.
Consequently, the air gap flux density can be derived from (1) and (2), which is shown as
According to (3), the harmonic order of air gap flux density is related to both Ps and Nr. It is worthwhile to further investigate the harmonic components and the corresponding contributions to the generation of open-circuit back EMF.
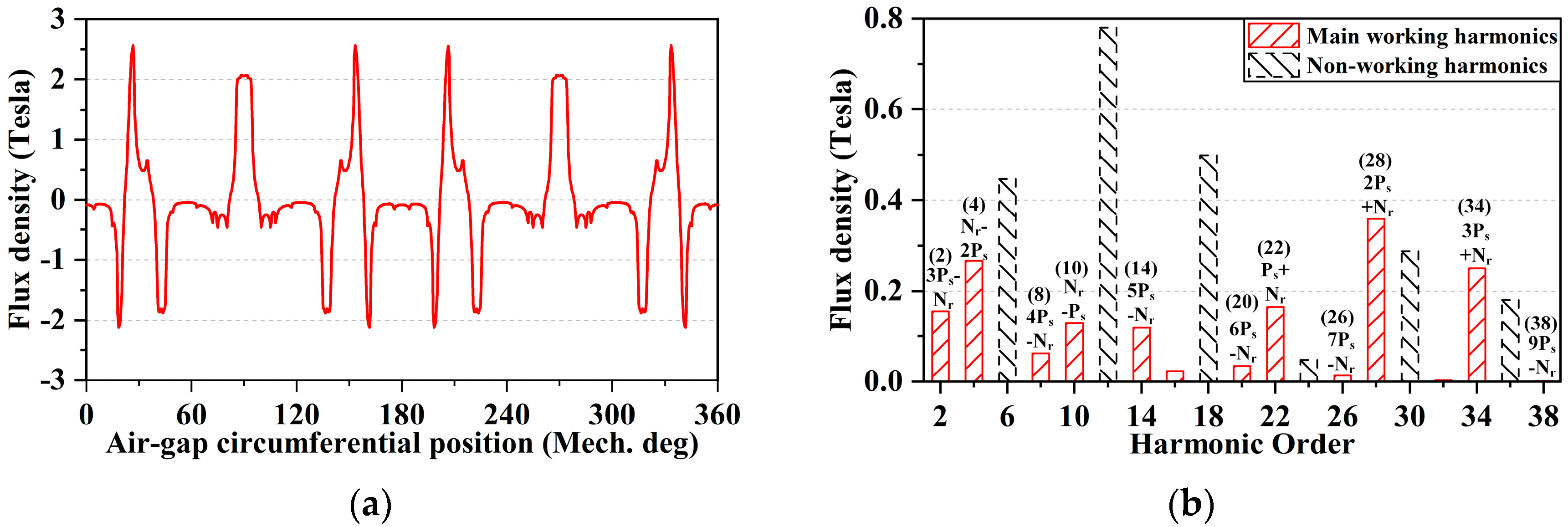
Figure 5a illustrates the finite element analysis (FEA) result of open-circuit air gap flux density considering the flux modulation effect, and the main working harmonics are identified, as shown in
Figure 5b. The high amplitude of the 2nd- and 3rd-order of the 6 pole pairs fundamental harmonic causes the modulated 2, 4, 28, and 34 pole pairs harmonics to have relatively high amplitudes. In addition, the amplitudes of the 10 and 22 pole pairs harmonics are also high, which also significantly affects the back EMF. To quantitatively investigate the contribution of different working harmonics, the back EMF can be derived as
where
rg is the radius of the air gap,
lst is the effective stack length, and
Nw(θ) is the winding function, which can be expressed as
where
Nc is the number of conductors in series per phase,
v is the harmonic order number, and
kwv is the winding factor of the specific harmonic.
Combining (4) and (5), the open-circuit back EMF can be further denoted by
where
n is the pole-pair number of the working harmonic, and
Ban,
kwn, and
ωn are the harmonic amplitude of the air gap flux density, the winding factor of the harmonic, and the electrical angular speed of the harmonic, respectively.
It can be observed from (6) that the key parameters affecting the amplitude of back EMF are
Ban,
kwn, and
ωn. Furthermore, the contributions of multiple working harmonics are quantitatively investigated, as listed in
Table 2.
Due to a high pole ratio, harmonics with small pole pairs have higher electrical angular speeds. Therefore, the 2 and 4 pole pairs harmonics generate a considerable portion of the total back EMF. In contrast, because of the negative values of winding factors, the 8, 10, 20, 22, and 34 pole pairs harmonics produce negative back EMF. Considering the origination of working harmonics, the 2nd- and 3rd-order stator PM MMFs lead to the generation of 2, 4, and 28 pole pairs harmonics, which contribute the most to the back EMF. However, the 1st-order PM MMF is modulated to produce harmonics of 10 and 22 pole pairs, reducing the amplitude of back EMF. Thus, the enhancement of 2nd- and 3rd-order stator PM MMFs is essential to improving the performance of the machine. Moreover, the analytical result of the back EMF is close to the FEA results, with a slight error of 2.55%, validating the accuracy of the MMF-permeance model.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}