
Reducing Traction Energy Consumption with a Decrease in the Weight of an All-Metal Gondola Car

Abstract
:1. Introduction
2. Materials and Methods
2.1. Traction Energy Consumption Depending on the Weight of a Gondola Car
2.2. Theoretical Preconditions for Reducing the Weight of an All-Metal Gondola Car
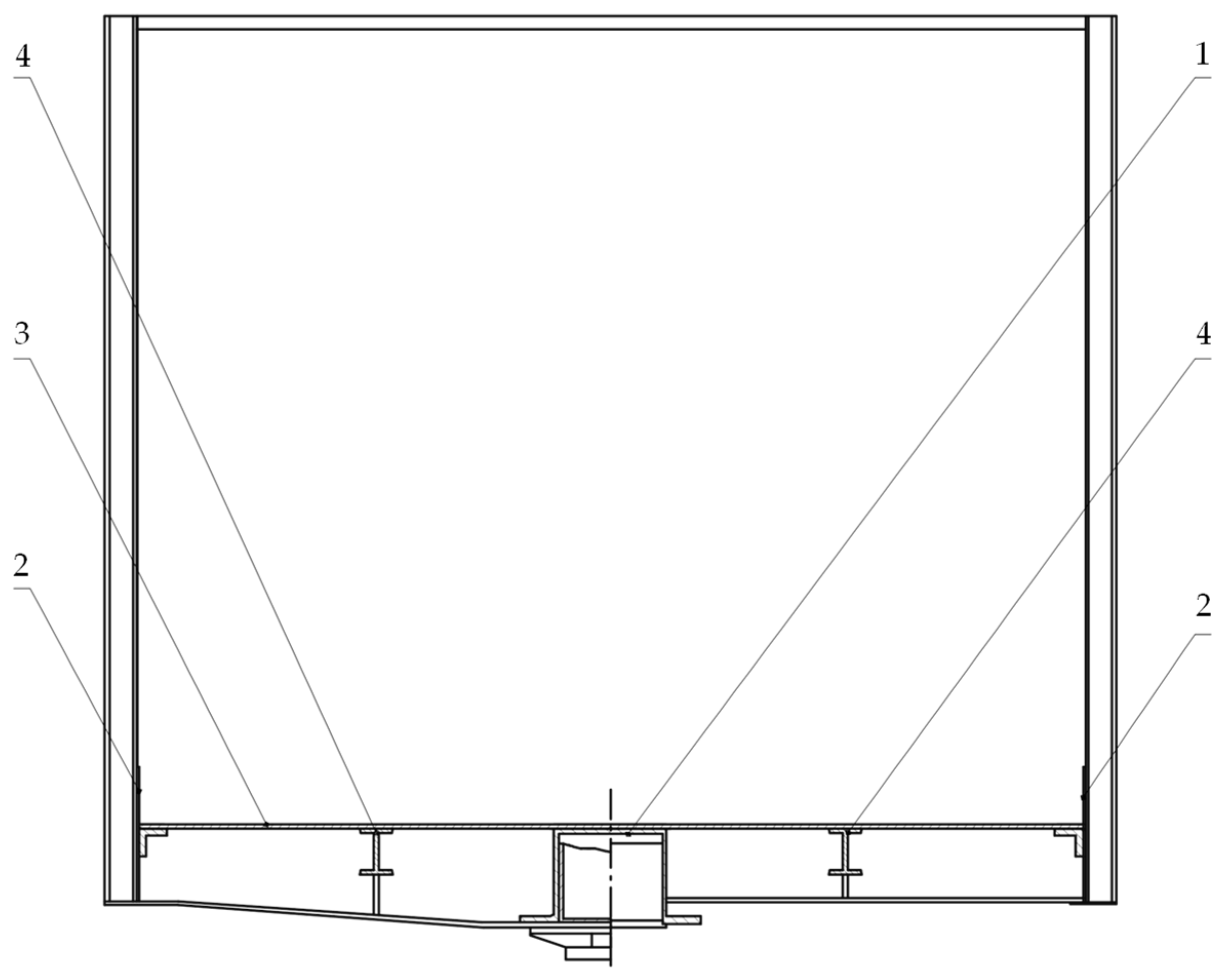
2.3. Method for Studying Stresses and Strains of the Blind Floor of an All-Metal Gondola Car Subsection
3. Results and Discussion
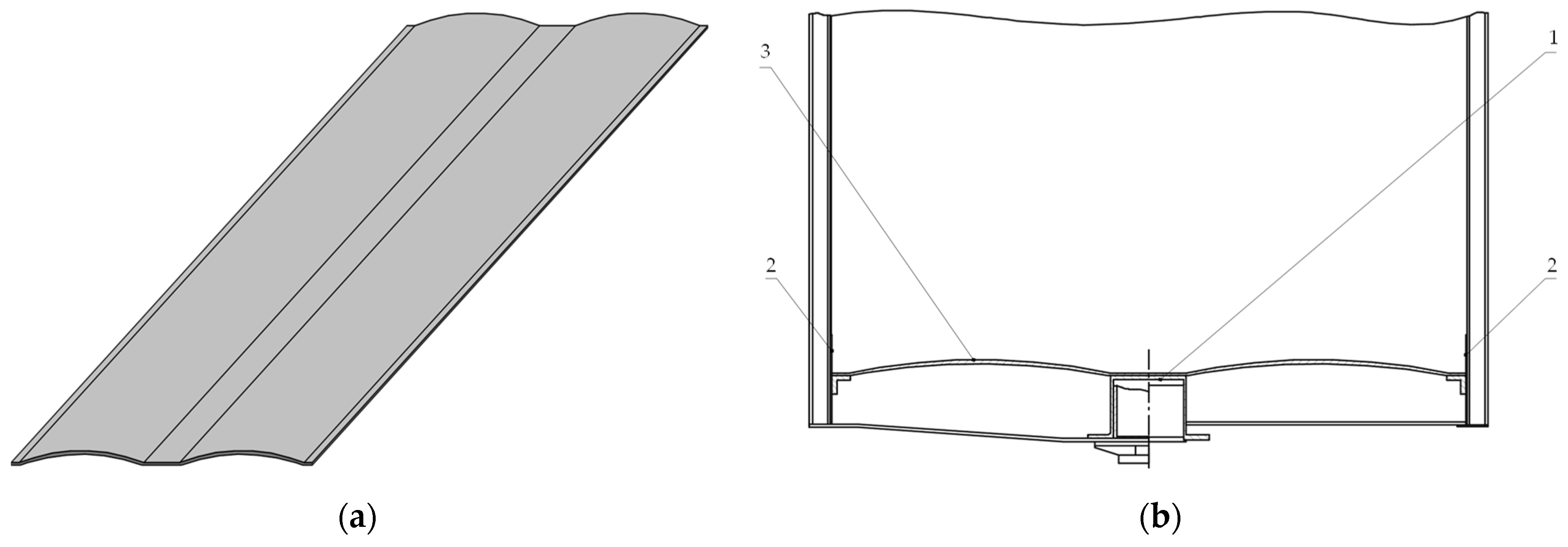
3.1. The Form of the Blind Floor of the All-Metal Gondola Car
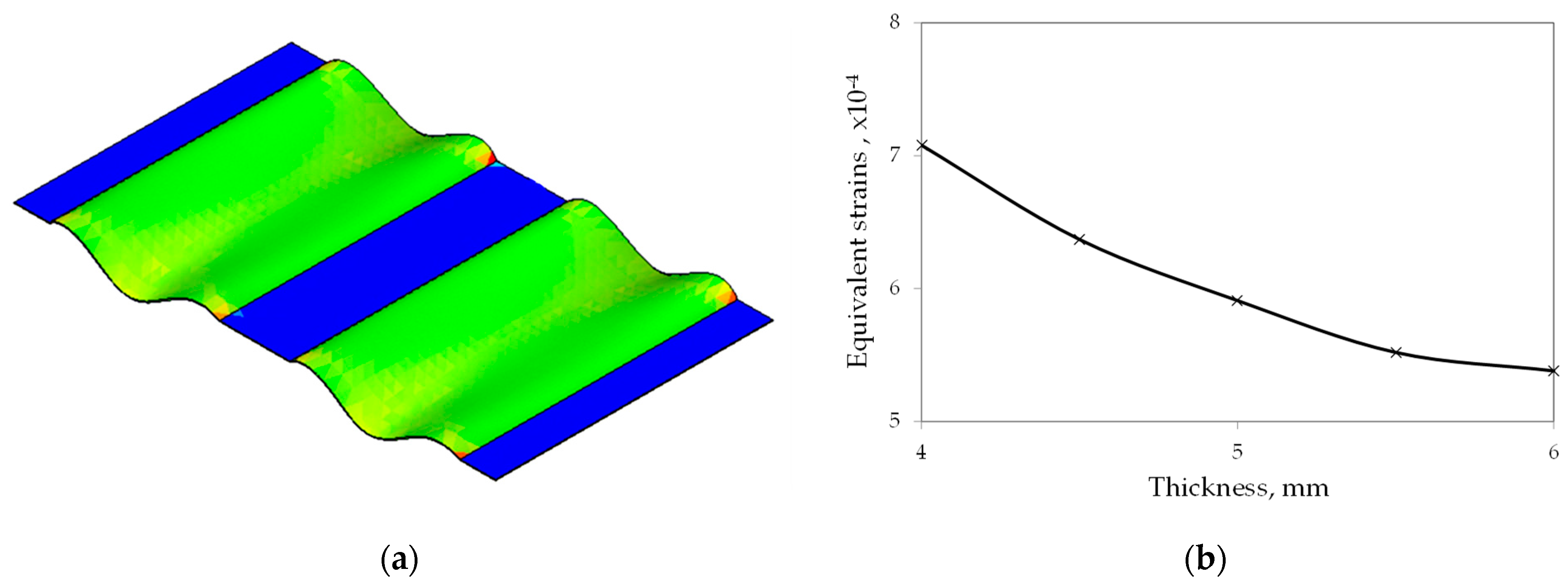
3.2. The Results of the Study of the Strength of the Blind Floor of an All-Metal Gondola Car
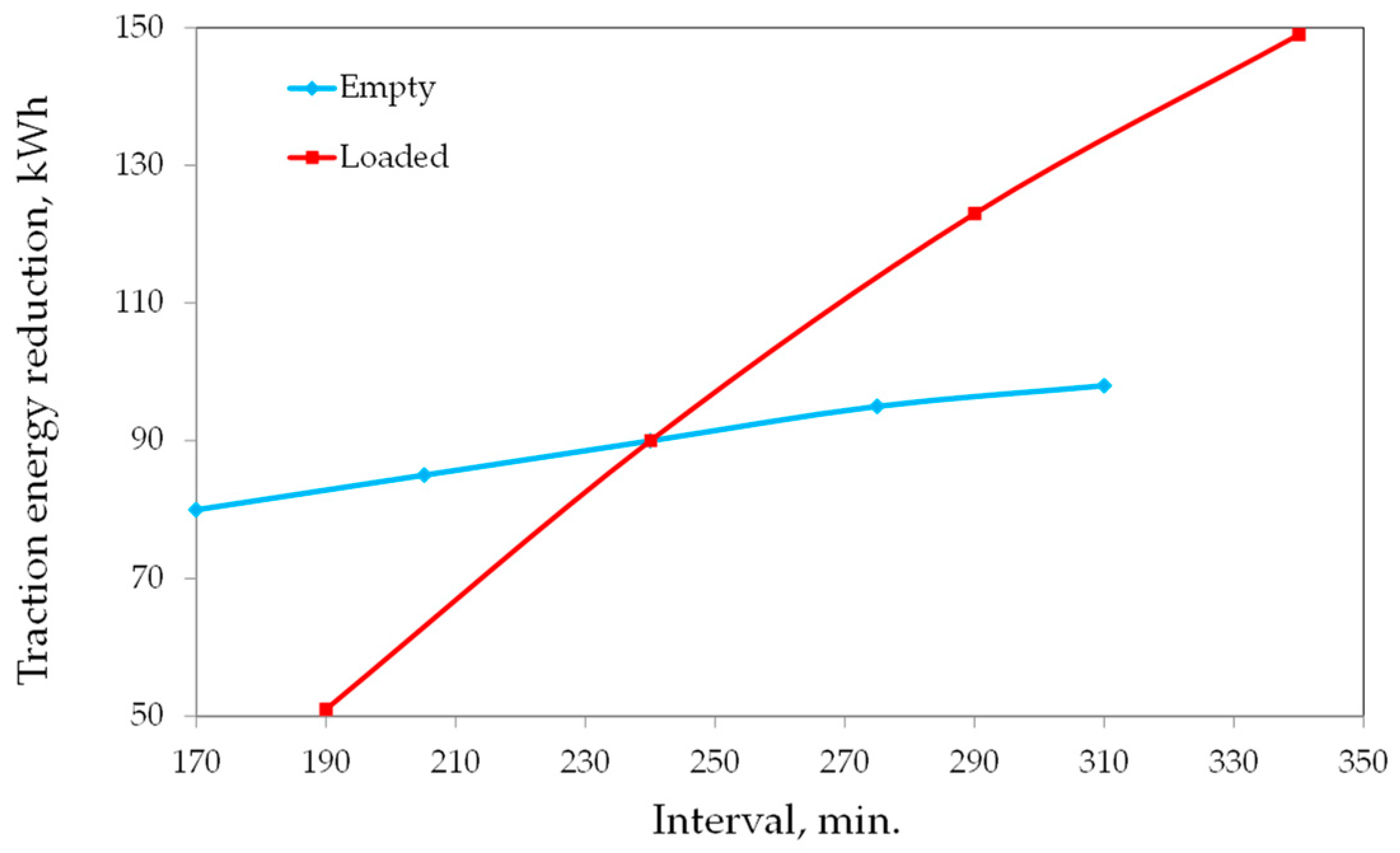
3.3. Traction Energy Consumption
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Baranovskyi, D.; Muradian, L.; Bulakh, M. The Method of Assessing Traffic Safety in Railway Transport. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2021; Volume 042075, pp. 1–6. [Google Scholar]
- Shvets, A.O. Dynamic indicators influencing design solution for modernization of the freight rolling stock. FME Trans. 2021, 49, 673–683. [Google Scholar] [CrossRef]
- Su, S.; Tang, T.; Wang, Y. Evaluation of Strategies to Reducing Traction Energy Consumption of Metro Systems Using an Optimal Train Control Simulation Model. Energies 2016, 9, 105. [Google Scholar] [CrossRef]
- Andryushchenko, A.; Kolpahchyan, P.; Zarifyan, A. Reduction of electric locomotive’s energy consumption by scalable tractive power control. Transp. Probl. 2018, 13, 103–110. [Google Scholar] [CrossRef]
- Huang, Y.; Yang, L.; Tang, T.; Gao, Z.; Cao, F.; Li, K. Train speed profile optimization with on-board energy storage devices: A dynamic programming based approach. Comput. Ind. Eng. 2018, 126, 149–164. [Google Scholar] [CrossRef]
- Baranovskyi, D.; Myamlin, S.; Podosonov, D.; Muradian, L. Determination of the filler concentration of the composite material to reduce the wear of the central bowl of the rail truck bolster. Ain Shams Eng. J. 2023, 102232. [Google Scholar] [CrossRef]
- Baranovskyi, D.; Myamlin, S. The criterion of development of processes of the self-organization of subsystems of the second level in tribosystems of diesel engine. Sci. Rep. 2023, 13, 5736. [Google Scholar] [CrossRef]
- Gao, Z.; Yang, L. Energy-saving operation approaches for urban rail transit systems. Front. Eng. Manag. 2019, 6, 139–151. [Google Scholar] [CrossRef]
- Zhang, R.; Yin, S.; Ye, M.; Yang, Z.; He, S. A Timetable Optimization Model for Urban Rail Transit with Express/Local Mode. J. Adv. Transp. 2021, 2021, 5589185. [Google Scholar] [CrossRef]
- Yildiz, A.; Arikan, O.; Keskin, K. Traction energy optimization considering comfort parameter: A case study in Istanbul metro line. Electr. Power Syst. Res. 2023, 218, 109196. [Google Scholar] [CrossRef]
- Shang, F.; Zhan, J.; Chen, Y. Energy-Saving Train Regulation for Metro Lines Using Distributed Model Predictive Control. Energies 2020, 13, 5483. [Google Scholar] [CrossRef]
- Su, S.; Wang, X.; Cao, Y.; Yin, J. An Energy-Efficient Train Operation Approach by Integrating the Metro Timetabling and Eco-Driving. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4252–4268. [Google Scholar] [CrossRef]
- Baranovskyi, D.; Bulakh, M.; Myamlin, S.; Kebal, I. New Design of the Hatch Cover to Increase the Carrying Capacity of the Gondola Car. Adv. Sci. Technol. Res. J. 2022, 16, 186–191. [Google Scholar] [CrossRef]
- Wang, X.; Xiao, Z.; Chen, M.; Sun, P.; Wang, Q.; Feng, X. Energy-Efficient Speed Profile Optimization and Sliding Mode Speed Tracking for Metros. Energies 2020, 13, 6093. [Google Scholar] [CrossRef]
- He, D.; Yang, Y.; Chen, Y.; Deng, J.; Shan, S.; Liu, J.; Li, X. An integrated optimization model of metro energy consumption based on regenerative energy and passenger transfer. Appl. Energy 2020, 264, 114770. [Google Scholar] [CrossRef]
- He, D.; Zhang, L.; Guo, S.; Chen, Y.; Shan, S.; Jian, H. Energy-efficient train trajectory optimization based on improved differential evolution algorithm and multi-particle model. J. Clean. Prod. 2021, 304, 127163. [Google Scholar] [CrossRef]
- Liu, W.; Tang, T.; Su, S.; Yin, J.; Cao, Y.; Wang, C. Energy-Efficient Train Driving Strategy with Considering the Steep Downhill Segment. Processes 2019, 7, 77. [Google Scholar] [CrossRef]
- Baranovskyi, D.; Myamlin, S.; Bulakh, M.; Podosonov, D.; Muradian, L. Determination of the Filler Concentration of the Composite Tape. Appl. Sci. 2022, 12, 11044. [Google Scholar] [CrossRef]
- Rocha, A.; Araújo, A.; Carvalho, A.; Sepulveda, J. A New Approach for Real Time Train Energy Efficiency Optimization. Energies 2018, 11, 2660. [Google Scholar] [CrossRef]
- Lingaitis, L.P.; Mjamlin, S.; Baranovsky, D.; Jastremskas, V. Experimental Investigations on Operational Reliability of Diesel Locomotyves Engines. Eksploat. I Niezawodn. Maint. Reliab. 2012, 14, 6–11. [Google Scholar]
- Mazurkow, A.; Witkowski, W.; Kalina, A.; Wierzba, B.; Oleksy, M. The efect of oil feeding type and oil grade on the oil film bearing capacity. Eksploat. I Niezawodn. Maint. Reliab. 2021, 23, 381–386. [Google Scholar] [CrossRef]
- Lingaitis, L.P.; Mjamlin, S.; Baranovsky, D.; Jastremskas, V. Prediction methodology of durability of locomotives diesel engines. Eksploat. I Niezawodn. Maint. Reliab. 2012, 14, 154–159. [Google Scholar]
- Pu, Q.; Zhu, X.; Liu, J.; Cai, D.; Fu, G.; Wei, D.; Sun, J.; Zhang, R. Integrated optimal design of speed profile and Fuzzy PID controller for train with multifactor consideration. IEEE Access 2020, 8, 152146–152160. [Google Scholar] [CrossRef]
- Chmielowiec, A. Algorithm for error-free determination of the variance of all contiguous subsequences and fixed-length con-tiguous subsequences for a sequence of industrial measurement data. Comput. Stat. 2021, 36, 2813–2840. [Google Scholar] [CrossRef]
- Chmielowiec, A.; Litwin, P. Efficient Inverted Index Compression Algorithm Characterized by Faster Decompression Com-pared with the Golomb-Rice Algorithm. Entropy 2021, 23, 296. [Google Scholar] [CrossRef] [PubMed]
- Douglas, H.; Roberts, C.; Hillmansen, S.; Schmid, F. An assessment of available measures to reduce traction energy use in railway networks. Energy Convers. Manag. 2015, 106, 1149–1165. [Google Scholar] [CrossRef]
- Kalina, A.; Mazurkow, A.; Witkowski, W.; Wierzba, B.; Oleksy, M. Properties of elasto-hydrodynamic oil film in meshing of harmonic drive gears. Materials 2021, 14, 1194. [Google Scholar] [CrossRef] [PubMed]
- Baranovskyi, D.; Bulakh, M.; Michajłyszyn, A.; Myamlin, S.; Muradian, L. Determination of the Risk of Failures of Locomotive Diesel Engines in Maintenance. Energies 2023, 16, 4995. [Google Scholar] [CrossRef]
- Montrone, T.; Pellegrini, P.; Nobili, P. Real-time energy consumption minimization in railway networks. Transp. Res. Part D Transp. Environ. 2018, 65, 524–539. [Google Scholar] [CrossRef]
- Tian, Z.; Zhao, N.; Hillmansen, S.; Roberts, C.; Dowens, T.; Kerr, C. SmartDrive: Traction Energy Optimization and Applications in Rail Systems. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2764–2773. [Google Scholar] [CrossRef]
- Blanco-Castillo, M.; Fernández-Rodríguez, A.; Fernández-Cardador, A.; Cucala, A.P. Eco-Driving in Railway Lines Considering the Uncertainty Associated with Climatological Conditions. Sustainability 2022, 14, 8645. [Google Scholar] [CrossRef]
- Tupaj, M.; Orłowicz, A.W.; Mróz, M.; Trytek, A.; Dolata, A.J.; Dziedzic, A. A Study on Material Properties of Intermetallic Phases in a Multicomponent Hypereutectic Al-Si Alloy with the Use of Nanoindentation Testing. Materials 2020, 13, 5612. [Google Scholar] [CrossRef] [PubMed]
- Kida, M.; Koszelnik, P. Investigation of the Presence and Possible Migration from Microplastics of Phthalic Acid Esters and Polycyclic Aromatic Hydrocarbons. J. Polym. Environ. 2020, 29, 599–611. [Google Scholar] [CrossRef]
- Zhang, D.; Tang, Y.; Peng, Q.; Dong, C.; Ye, Y. Effect of mass distribution on curving performance for a loaded wagon. Nonlinear Dyn. 2021, 104, 2259–2273. [Google Scholar] [CrossRef]
- Sandrini, G.; Gadola, M.; Chindamo, D.; Candela, A.; Magri, P. Exploring the Impact of Vehicle Lightweighting in Terms of Energy Consumption: Analysis and Simulation. Energies 2023, 16, 5157. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, J. Advanced lightweight materials for Automobiles: A review. Mater. Des. 2022, 221, 110994. [Google Scholar] [CrossRef]
- Deepati, A.K.; Alhazmi, W.; Benjeer, I. Mechanical characterization of AA5083 aluminum alloy welded using resistance spot welding for the lightweight automobile body fabrication. Mater. Today Proc. 2021, 45, 5139–5148. [Google Scholar] [CrossRef]
- Sateesh, N.; Subbiah, R.; Nookaraju, B.; Nagaraju, D.S. Achieving safety and weight reduction in automobiles with the application of composite material. Mater. Today Proc. 2022, 62, 4469–4472. [Google Scholar] [CrossRef]
- Czerwinski, F. Current Trends in Automotive Lightweighting Strategies and Materials. Materials 2021, 14, 6631. [Google Scholar] [CrossRef]
- Ulianov, C.; Önder, A.; Peng, Q. Analysis and selection of materials for the design of lightweight railway vehicles. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2018; Volume 292, p. 012072. [Google Scholar] [CrossRef]
- Özdemir, A.; Önder, A. An environmental life cycle comparison of various sandwich composite panels for railway passenger vehicle applications. Environ. Sci. Pollut. Res. 2020, 27, 45076–45094. [Google Scholar] [CrossRef]
- Słowiński, M. An Analysis of CFRP Application in the Construction of Rail Vehicles. Probl. Kolejnictwa Railw. Rep. 2021, 65, 105–113. [Google Scholar] [CrossRef]
- Mistry, P.; Johnson; Galappaththi, U. Selection and ranking of rail vehicle components for optimal lightweighting using composite materials. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 235, 390–402. [Google Scholar] [CrossRef]
- Winnett, J.; Hoffrichter, A.; Iraklis, A.; McGordon, A.; Hughes, D.J.; Ridler, T.; Mallinson, N. Development of a very light rail vehicle. In Proceedings of the Institution of Civil Engineers Transpor; Thomas Telford Ltd.: London, UK, 2017; pp. 231–242. [Google Scholar]
- Galimova, F.; Khurmatov, Y.; Abdulloev, M.; Jumabekov, B.; Sultonaliev, D.; Ergeshova, D. Modern Gondola with Lightweight Body. In XIV International Scientific Conference “INTERAGROMASH 2021”; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1043–1050. [Google Scholar] [CrossRef]
- Panchenko, S.; Gerlici, J.; Vatulia, G.; Lovska, A.; Ravlyuk, V.; Harusinec, J. Studying the load of composite brake pads under high-temperature impact from the rolling surface of wheels. EUREKA Phys. Eng. 2023, 4, 155–167. [Google Scholar] [CrossRef]
- Popov, E.S.; Shinsky, O.I. Performance quality analysis of brake iron and composite pads for railway rolling composition. Litiyo i Met. (Foundry Prod. Met.) 2021, 1, 27–37. [Google Scholar] [CrossRef]
- Robinson, M.; Carruthers, J.; O’Neill, C.; Ingleton, S.; Grasso, M. Transport of DE-LIGHT: The design and prototyping of a light-weight crashworthy rail vehicle driver’s cab. Procedia-Soc. Behav. Sci. 2012, 48, 672–681. [Google Scholar] [CrossRef]
- Mistry, P. Johnson Lightweighting of railway axles for the reduction of unsprung mass and track access charges. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2020, 234, 958–968. [Google Scholar] [CrossRef]
- Bruni, S.; Mistry, P.J.; Johnson, M.S.; Bernasconi, A.; Carboni, M.; Formaggioni, D.; Carra, G.; Macchiavello, S.; Ferrante, E.; Kaiser, I.; et al. A vision for a lightweight railway wheelset of the future. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 236, 1179–1197. [Google Scholar] [CrossRef]
- Mistry, P.J.; Johnson, M.S.; Li, S.; Bruni, S.; Bernasconi, A. Parametric sizing study for the design of a lightw eight composite railway axle. Compos. Struct. 2021, 267, 113851. [Google Scholar] [CrossRef]
- Cecchel, S.; Chindamo, D.; Turrini, E.; Carnevale, C.; Cornacchia, G.; Gadola, M.; Panvini, A.; Volta, M.; Ferrario, D.; Golimbioschi, R. Impact of reduced mass of light commercial vehicles on fuel consumption, CO2 emissions, air quality, and socio-economic costs. Sci. Total. Environ. 2018, 613–614, 409–417. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Main Data | Units | Value |
|---|---|---|
| The length of the train section | km | 200 |
| The interval of train running time on the train section, which consisted of loaded all-metal gondola cars | minutes | 190–340 |
| The interval of train running time on the train section, which consisted of empty all-metal gondola cars | minutes | 170–310 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bulakh, M.; Klich, L.; Baranovska, O.; Baida, A.; Myamlin, S. Reducing Traction Energy Consumption with a Decrease in the Weight of an All-Metal Gondola Car. Energies 2023, 16, 6733. https://doi.org/10.3390/en16186733
Bulakh M, Klich L, Baranovska O, Baida A, Myamlin S. Reducing Traction Energy Consumption with a Decrease in the Weight of an All-Metal Gondola Car. Energies. 2023; 16(18):6733. https://doi.org/10.3390/en16186733
Chicago/Turabian StyleBulakh, Maryna, Leszek Klich, Oleksandra Baranovska, Anastasiia Baida, and Sergiy Myamlin. 2023. "Reducing Traction Energy Consumption with a Decrease in the Weight of an All-Metal Gondola Car" Energies 16, no. 18: 6733. https://doi.org/10.3390/en16186733
APA StyleBulakh, M., Klich, L., Baranovska, O., Baida, A., & Myamlin, S. (2023). Reducing Traction Energy Consumption with a Decrease in the Weight of an All-Metal Gondola Car. Energies, 16(18), 6733. https://doi.org/10.3390/en16186733