
Research on Air Gap Magnetic Field Characteristics of Trapezoidal Halbach Permanent Magnet Linear Synchronous Motor Based on Improved Equivalent Surface Current Method

Abstract
:1. Introduction
2. Model of Improved Equivalent Analytical Algorithm
3. Improved Equivalent Analytical Algorithm Modeling and Calculation Results
- The secondary array of the motor is infinite along the z-axis;
- The secondary magnetization of the motor is uniform;
- The motor yoke is made of aluminum. In the calculation, the air, aluminum, and magnet permeability are taken as vacuum permeability.
3.1. Improved Equivalent Surface Current Method
3.2. THDB Calculation Method
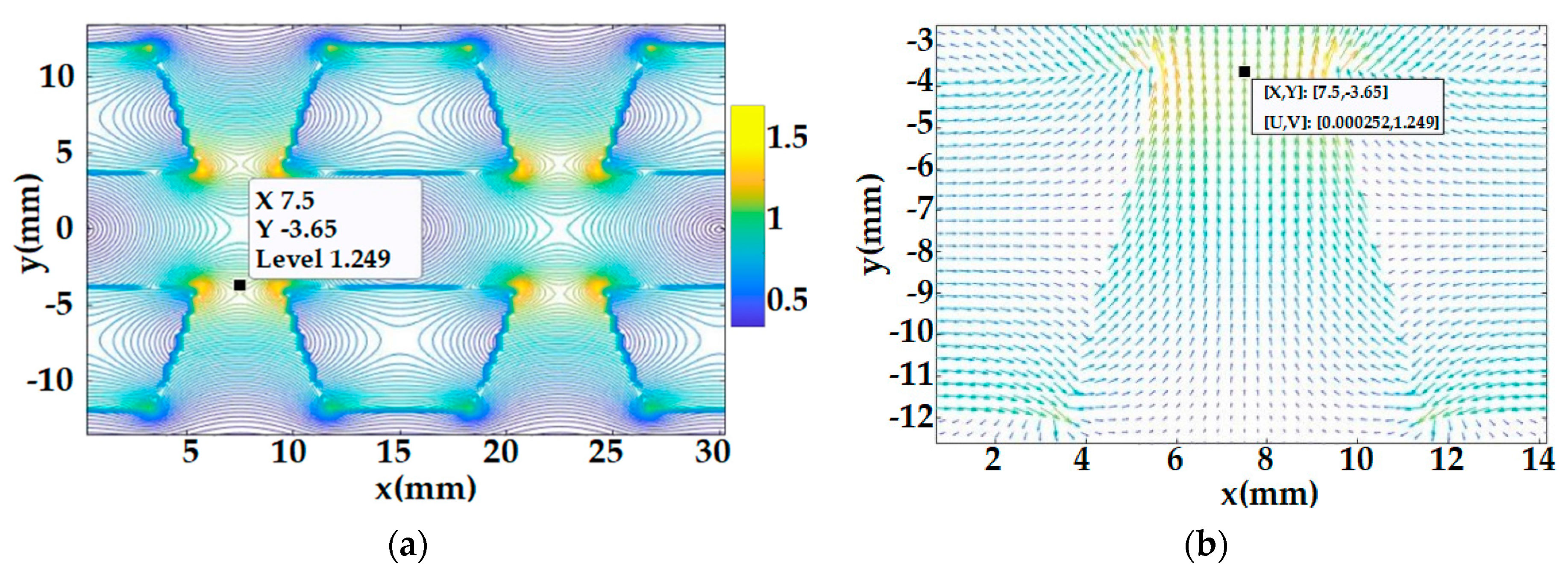
3.3. Calculation Results and Finite Element Verification
4. Analysis of the Influence of Trapezoidal Bottom Angles α and αw, αh, and αg on the Air Gap Magnetic Field
4.1. The Influence of α and αw on the Bpeak(α, αw) and THDB(α, αw) of Air Gap Central Magnetic Field
4.2. Analysis of Influence Mechanism of α and αw on the Bpeak and THDB of Air Gap Central Magnetic Field
5. Conclusions
- We present an improved equivalent surface current analytical algorithm for calculating the coreless PMLSM air gap magnetic field of a two-dimensional Halbach permanent magnet array, with the polygon side length as the element. This algorithm can fully reflect the internal characteristics of the real air gap magnetic field, and the calculation results are completely consistent with those of the finite element method, effectively proving the correctness of the new method;
- Under the coupling effect of the bottom angle α of the trapezoidal magnet, αw, αh, and αh, αw is the most influential factor affecting the Bpeak and THDB among the three magnetic pole structure parameters, and αh and αg have only a monotonic effect on the Bpeak and THDB;
- The maximum Bpeak value of the central magnetic field air gap is around α > 90° and αw < 0.5, and the minimum value of the THDB of the central magnetic field of the air gap changes linearly;
- In the Halbach layout of the magnetic pole array, the “flux convergence” effect and the “equilateral” effect are the main factors influencing the area of the maximum Bpeak and the area of the minimum THDB.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Baloch, N.; Khaliq, S.; Kwon, B. A high force density HTS tubular Vernier machine. In Proceedings of the IEEE International Magnetics Conference, Dublin, Ireland, 24–28 April 2017. [Google Scholar]
- Zhang, C.; Zhu, J.; Han, X. Rotor strength analysis of high-speed surface mounted permanent magnet rotors. Proc. CSEE 2016, 32, 4719–4727. [Google Scholar]
- Yao, Y.; Lu, Q. Comparative study of E-core and C-core modular PM linear machines with different slot/pole combinations. In Proceedings of the IEEE International Magnetics Conference, Dublin, Ireland, 24–28 April 2017. [Google Scholar]
- Wang, K.; Sun, H.; Zhang, L. An overview of rotor pole optimization techniques for permanent magnet synchronous machines. Proc. CSEE 2017, 37, 7304–7317. [Google Scholar]
- Tang, X.; Wang, X.; Sun, S. Analytical analysis and study of reduction methods of cogging torque in line-start permanent magnet synchronous motors. Proc. CSEE 2016, 36, 1395–1403. [Google Scholar]
- Krop, D.C.J.; Lomonova, E.A.; Vandenput, A.J.A. Application of Schwarz-Christoffel mapping to permanent magnet linear motor analysis. IEEE Trans. Magn. 2008, 44, 352–359. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.H.; Song, J.Y.; Kim, D.W. Particle swarm optimization algorithm with intelligent particle number control for optimal design of electric machines. IEEE Trans. Ind. Electron. 2018, 65, 1791–1798. [Google Scholar] [CrossRef]
- Song, J.; Dong, F.; Zhao, J. An efficient multi-objective design optimization method for PMSLM based on extreme learning machine. IEEE Trans. Ind. Electron. 2019, 66, 1001–1011. [Google Scholar] [CrossRef]
- Sheikh-Ghalavand, B.; Vaez-Zadeh, S.; Hassanpour, I.A. An improved magnetic equivalent circuit model for iron-core linear permanent-magnet synchronous motors. IEEE Trans. Magn. 2010, 46, 112–120. [Google Scholar] [CrossRef]
- Du, Y.; Cheng, M.; Chau, K.T. Design and analysis of a new linear primary permanent magnet vernier machine. Trans. China Electrotech. Soc. 2012, 27, 22–30. [Google Scholar]
- Liu, G.; Jiang, S.; Zhao, W. Modular reluctance network simulation of a linear permanent-magnet vernier machine using new mesh generation methods. IEEE Trans. Ind. Electron. 2017, 64, 5323–5332. [Google Scholar] [CrossRef]
- Asfirane, S.; Hlioui, S.; Amara, Y. Global quantities computation using mesh-based generated reluctance networks. IEEE Trans. Magn. 2018, 54, 7002304. [Google Scholar] [CrossRef]
- Lee, M.G.; Gweon, D.G. Optimal design of a double-sided linear motor with a multi-segmented trapezoidal magnet array for a high precision positioning system. J. Magn. Magn. Mater. 2004, 281, 336–346. [Google Scholar] [CrossRef]
- Xue, Z.; Li, H.; Zhou, Y. Analytical prediction and optimization of cogging torque in surface-mounted permanent magnet machines with modified particle swarm optimization. IEEE Trans. Ind. Electron. 2017, 64, 9795–9805. [Google Scholar] [CrossRef]
- Sun, M.; Tang, R.; Han, X. Analysis and modeling for open circuit air gap magnetic field prediction in axial flux permanent magnet machines. Proc. CSEE 2018, 38, 1525–1533. [Google Scholar]
- Zhou, Y.; Lu, H.; Meng, G. Analytical calculation of magnetic field and cogging torque in surface-mounted permanent magnet machines accounting for any eccentric rotor shape. IEEE Trans. Ind. Electron. 2015, 62, 3438–3447. [Google Scholar] [CrossRef]
- Wu, L.; Yin, H.; Wang, D. A nonlinear subdomain and magnetic circuit hybrid model for open-circuit field prediction in surface -mounted PM machines. IEEE Trans. Energy Convers. 2019, 34, 1485–1495. [Google Scholar] [CrossRef]
- Deng, C.; Ye, C.; Yang, J. A Novel Permanent Magnet Linear Motor for the Application of Electromagnetic Launch System. IEEE Trans. Appl. Supercond. 2020, 30, 4902005. [Google Scholar] [CrossRef]
- Boduroglu, A.; Demir, Y. A Novel Track Structure of Double-Sided Linear PM Synchronous Motor for Low Cost and High Force Density Applications. IEEE Trans. Magn. 2021, 57, 8201305. [Google Scholar] [CrossRef]
- Ma, W.; Xi, L.; Zhang, Y. Design and comparison of linear induction motor and superconducting linear synchronous motor for electromagnetic launch. In Proceedings of the International Symposium on Linear Drives for Industry Applications, Wuhan, China, 1–3 July 2021. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| w | the equivalent width of a trapezoidal permanent magnet | 4.8 mm, 10.2 mm |
| h | height of trapezoidal permanent magnet | 9 mm |
| τ | pole pitch | 15 mm |
| g | air gap height | 9 mm |
| M | magnetization | 1.05 × 10 6 A/m |
| μ0 | permeability | 4π × 10−7 T·m/A |
| α | bottom angle of trapezoidal | 70°, 110° |
| Objective Function | Calculation Parameters | |
|---|---|---|
| Bpeak(α, αw) THDB(α, αw) | αg = 0.5 | αh = 0.5 |
| αg = 0.5 | αh = 0.3 | |
| αh = 0.7 | ||
| αh = 0.5 | αg = 0.3 | |
| αg = 0.7 | ||
| Calculation Parameters | Bpeak(α, αw) | THDB(α, αw) |
|---|---|---|
| αh = 0.5, αg = 0.5 (Basic type, Bpeak(α, αw) has a maximum value area, and the minimum value area of THDB is linear.) |  |  |
| αh = 0.3, αg = 0.5 |  | 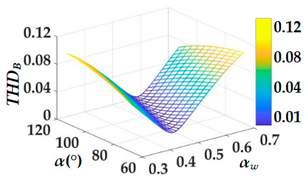 |
| αh = 0.7, αg = 0.5 (The difference in αh affects the Bpeak and THDB trends.) | 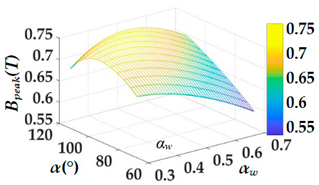 |  |
| αh = 0.5, αg = 0.3 | 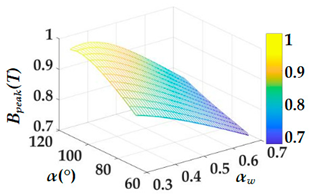 | 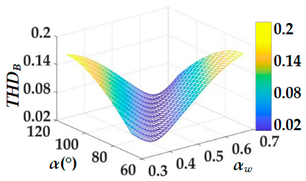 |
| αh = 0.5, αg = 0.7 (The difference in αg affects the steepness of Bpeak and THDB.) | 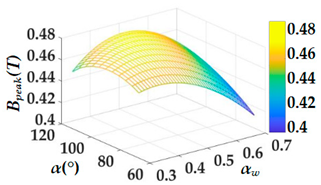 |  |
| α | Bpeak (T) | THDB |
|---|---|---|
| 75° | 0.8754 | 0.0136 |
| 90° | 0.9027 | 0.0475 |
| 105° | 0.9205 | 0.0687 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Zhang, J.; Zhao, X.; Liu, B.; Dong, H. Research on Air Gap Magnetic Field Characteristics of Trapezoidal Halbach Permanent Magnet Linear Synchronous Motor Based on Improved Equivalent Surface Current Method. Energies 2023, 16, 793. https://doi.org/10.3390/en16020793
Li B, Zhang J, Zhao X, Liu B, Dong H. Research on Air Gap Magnetic Field Characteristics of Trapezoidal Halbach Permanent Magnet Linear Synchronous Motor Based on Improved Equivalent Surface Current Method. Energies. 2023; 16(2):793. https://doi.org/10.3390/en16020793
Chicago/Turabian StyleLi, Bo, Jun’an Zhang, Xiaolong Zhao, Bo Liu, and Hao Dong. 2023. "Research on Air Gap Magnetic Field Characteristics of Trapezoidal Halbach Permanent Magnet Linear Synchronous Motor Based on Improved Equivalent Surface Current Method" Energies 16, no. 2: 793. https://doi.org/10.3390/en16020793