Improved Control Strategy for Water Pumping System Fed by Intermittent Renewable Source †


Abstract
:1. Introduction
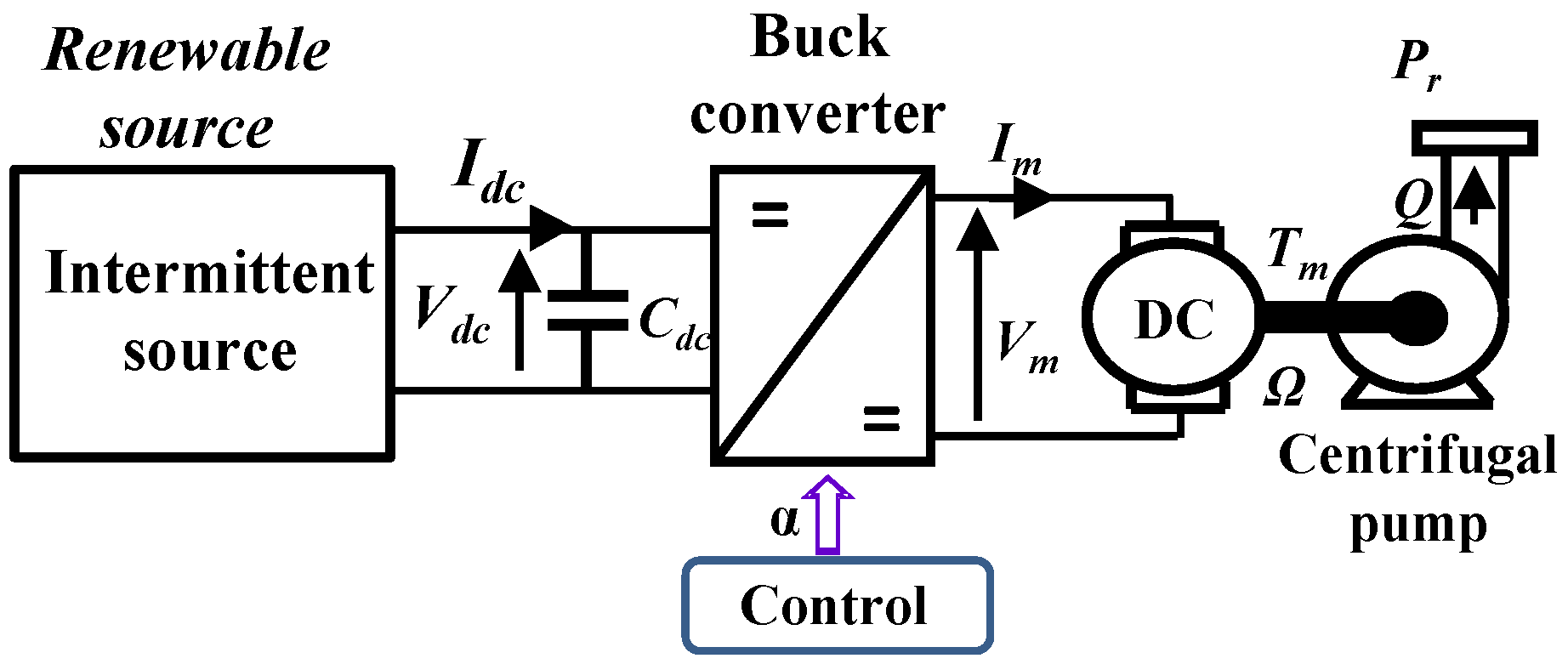
2. The “Storageless” Pumping System Structure
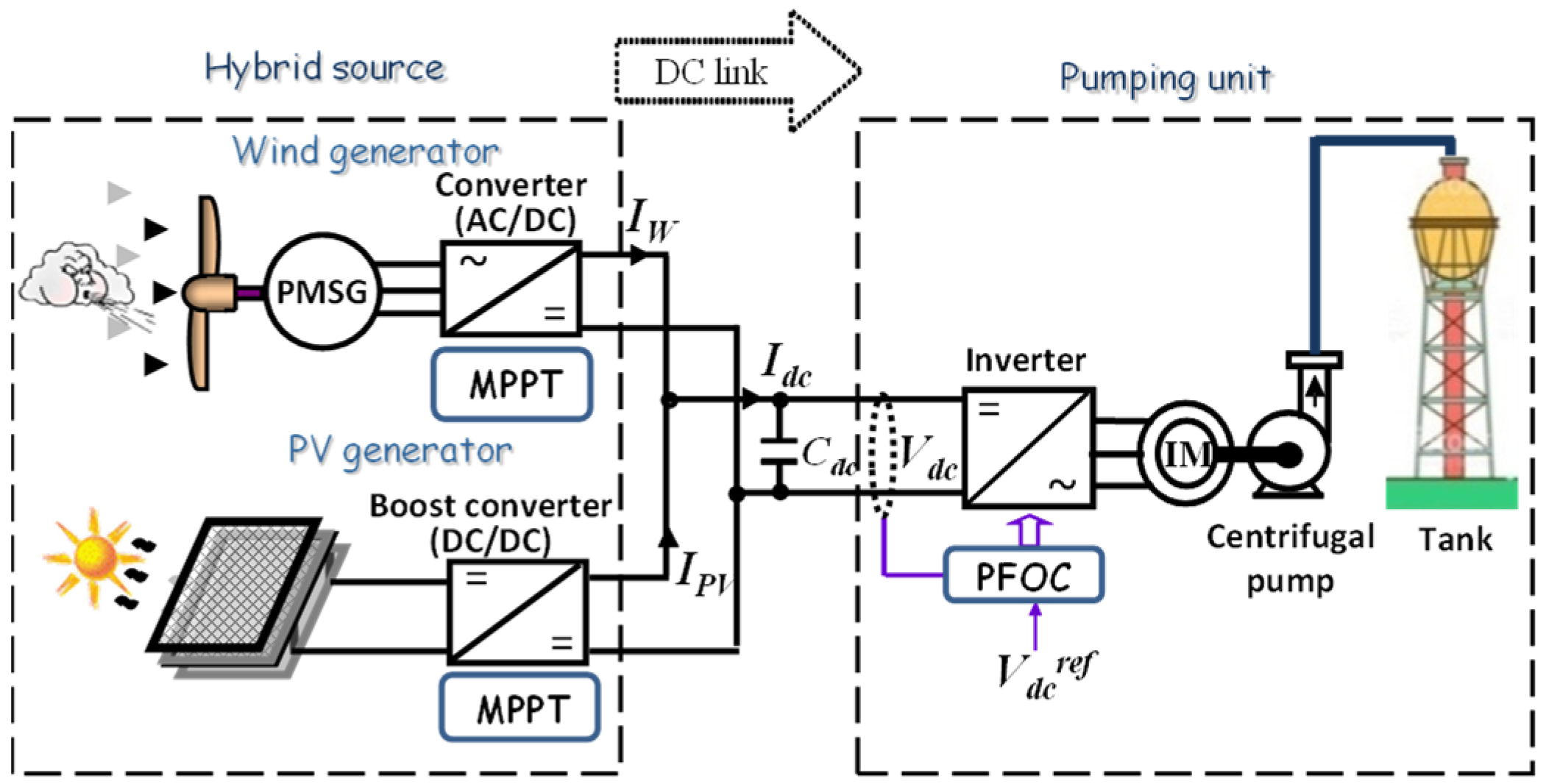
2.1. The “Hybrid Pumping System”
2.2. Steady State System Analysis
3. Design of the Vector Control Strategy
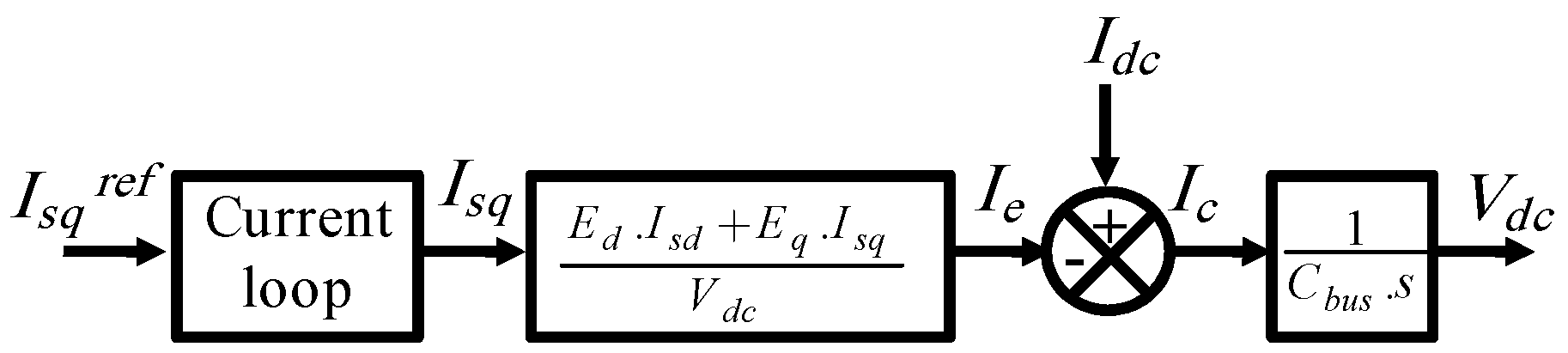
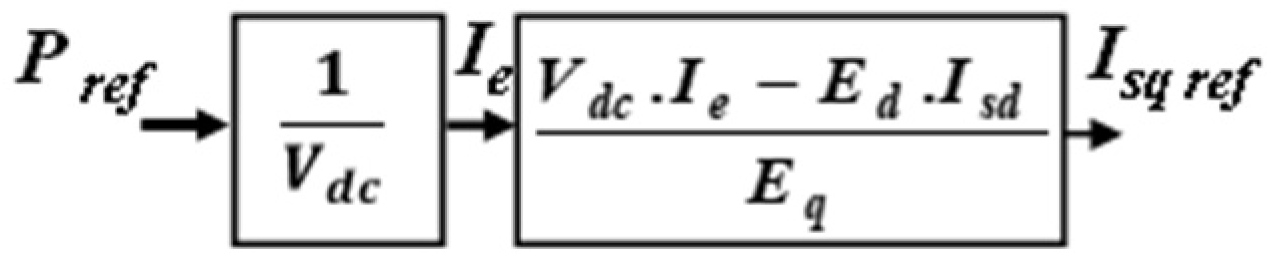
DC Voltage Bus Control
4. Simulations, Experimental Setup and Validation Results
4.1. Simulation Results
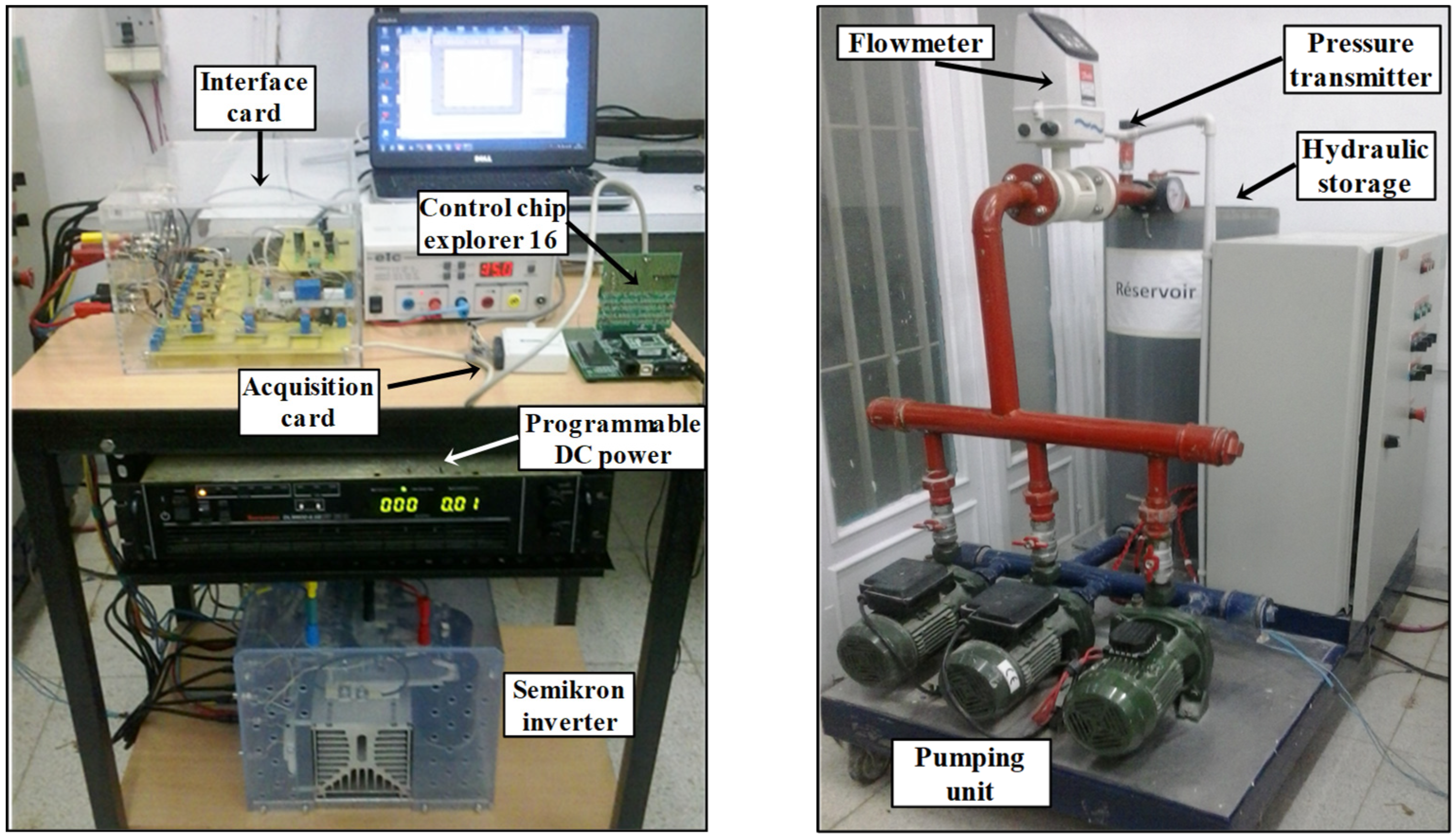
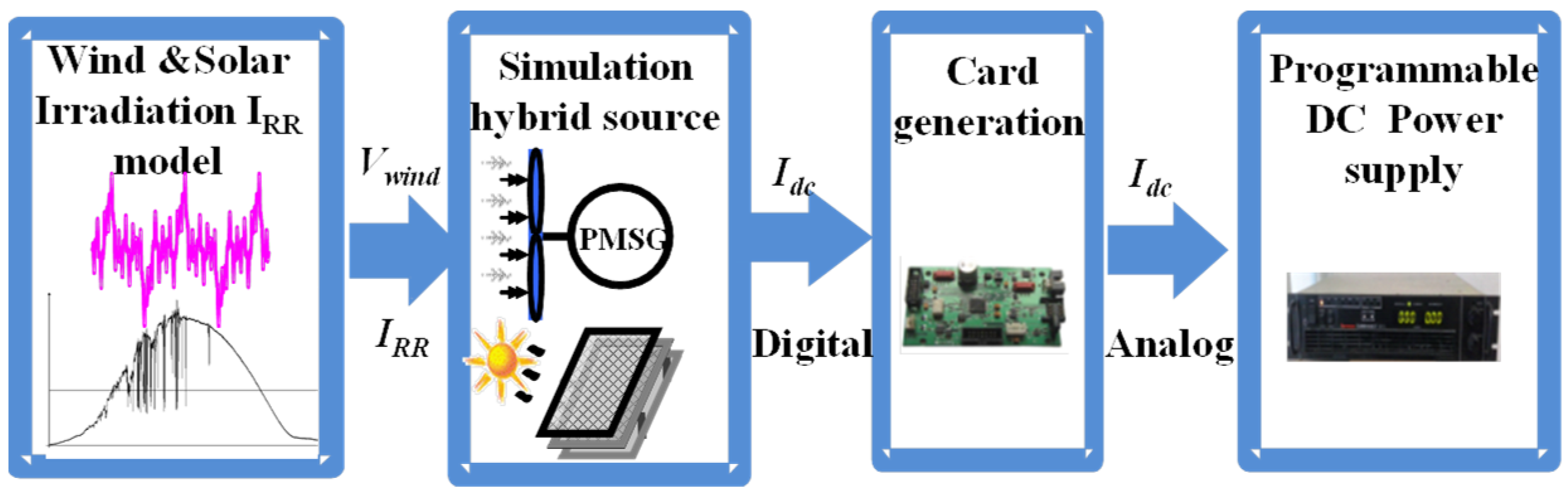
4.2. Experimental Setup
4.3. Experimental Results and Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Rs | Stator resistance |
| Rr | Rotor resistance |
| Ls | Stator inductance |
| Lr | Rotor inductance |
| Msr | Mutual inductance |
| Rsr | Stator rotor equivalent resistance |
| ωs | Stator angular frequency |
| σ | Blondel coefficient |
| Vsd, Vsq | Stator voltage components in dq reference frame |
| Isd, Isq | Stator current components in dq reference frame |
| Ed, Eq | back electromotive force (EMF) components in dq reference frame |
| ϕr, ϕrd, ϕrq | Rotor flux vector and its components in dq reference frame |
| τr | Rotor time constant |
| Idc | DC current in the DC bus |
| Ie | Inverter DC input current |
| Ic | Current in DC bus capacitor |
| Vdc | DC bus voltage |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Parameters | ||
|---|---|---|---|
| Power | 750 W | Rs | 7.5 Ω |
| Voltage | 230 V | Rr | 11 Ω |
| Current | 4.3 A | Ls | 0.484 H |
| Frequency | 50 Hz | Lr | 0.484 H |
| Pole pairs | 1 | Msr | 0.46 H |
| Speed | 2980 rpm | Rsr | 17.436 Ω |
| σ | 0.0967 | ||
References
- Khondoker, M.; Mandal, S.; Gurav, R.; Hwang, S. Freshwater Shortage, Salinity Increase, and Global Food Production: A Need for Sustainable Irrigation Water Desalination—A Scoping Review. Earth 2023, 4, 223–240. [Google Scholar] [CrossRef]
- Mekonnen, M.M.; Hoekstra, A.Y. Sustainability: Four billion people facing severe water scarcity. Sci. Adv. 2016, 2, e1500323. [Google Scholar] [CrossRef]
- Wada, Y.; Flörke, M.; Hanasaki, N.; Eisner, S.; Fischer, G.; Tramberend, S.; Satoh, Y.; Van Vliet, M.T.H.; Yillia, P.; Ringler, C.J.G.M.D.; et al. Modeling global water use for the 21st century: The Water Futures and Solutions (WFaS) initiative and its approaches. Geosci. Model Dev. 2016, 9, 175–222. [Google Scholar] [CrossRef]
- Wang, X.C.; Jiang, P.; Yang, L.; Van Fan, Y.; Klemeš, J.J.; Wang, Y. Extended water-energy nexus contribution to environmentally-related sustainable development goals. Renew. Sustain. Energy Rev. 2021, 150, 111485. [Google Scholar] [CrossRef]
- Vamja, R.V.; Mulla, M.A. Development of grid-interactive inverter utilising induction motor driven photovoltaic water pumping system. IET Power Electron. 2020, 13, 3373–3383. [Google Scholar] [CrossRef]
- Abidi, M.; Ben Rhouma, A.; Belhadj, J. Water-Energy system toward the meeting of an improved Low Voltage Ride Through Capability of Grid-Connected photovoltaic generator: Power-sharing and control issues. Energy Sources Part A Recovery Util. Environ. Eff. 2020, 1–28. [Google Scholar] [CrossRef]
- Liu, B.; Zhou, B.; Yang, D.; Li, G.; Cao, J.; Bu, S.; Littler, T. Optimal planning of hybrid renewable energy system considering virtual energy storage of desalination plant based on mixed-integer NSGA-III. Desalination 2022, 521, 115382. [Google Scholar] [CrossRef]
- Zaibi, M.; Cherif, H.; Champenois, G.; Sareni, B.; Roboam, X.; Belhadj, J. Sizing methodology based on design of experiments for freshwater and electricity production from multi-source renewable energy systems. Desalination 2018, 446, 94–103. [Google Scholar] [CrossRef]
- Vick, B.D.; Neal, B.A. Analysis of off-grid hybrid wind turbine/solar PV water pumping systems. Sol. Energy 2012, 86, 1197–1207. [Google Scholar] [CrossRef]
- Lara, D.D.; Merino, G.G.; Pavez, B.J.; Tapia, J.A. Efficiency assessment of a wind pumping system. Energy Convers. Manag. 2011, 52, 795–803. [Google Scholar] [CrossRef]
- Sadasivam, P.; Kumaravel, M.; Vasudevan, K.; Jhunjhunwala, A. Analysis of subsystems behaviour and performance evaluation of solar photovoltaic powered water pumping system. In Proceedings of the 2013 IEEE 39th Photovoltaic Specialists Conference (PVSC), Tampa, FL, USA, 16–21 June 2013; pp. 2932–2937. [Google Scholar] [CrossRef]
- Dali, M.; Belhadj, J.; Roboam, X. Hybrid solar–wind system with battery storage operating in grid-connected and standalone mode: Control and energy management—Experimental investigation. Energy 2010, 35, 2587–2595. [Google Scholar] [CrossRef]
- Prabhakaran, K.K.; Sunkara, V.; Karthikeyan, A. Single-stage PV-powered boost inverter-fed permanent-magnet synchronous motor-driven water-pumping system. Clean Energy 2022, 6, 726–737. [Google Scholar] [CrossRef]
- Narendra, A.; Venkataramana, N.N.; Panda, A.K.; Tiwary, N.; Kumar, A. A Single-Stage SPV-Fed Reduced Switching Inverter-Based Sensorless Speed Control of IM for Water Pumping Applications. Int. Trans. Electr. Energy Syst. 2022, 2022, 3805791. [Google Scholar] [CrossRef]
- Firatoglu, Z.A.; Yesilata, B. New approaches on the optimization of directly coupled PV pumping systems. Sol. Energy 2004, 77, 81–93. [Google Scholar] [CrossRef]
- Kolhe, M.; Joshi, J.C.; Kothari, D.P. Performance Analysis of a Directly Coupled Photovoltaic Water-Pumping System. IEEE Trans. Energy Convers. 2004, 19, 613–618. [Google Scholar] [CrossRef]
- Mokeddem, A.; Midoun, A.; Kadri, D.; Hiadsi, S.; Raja, I.A. Performance of a directly-coupled PV water pumping system. Energy Convers. Manag. 2011, 52, 3089–3095. [Google Scholar] [CrossRef]
- Angadi, S.; Yaragatti, U.R.; Suresh, Y.; Raju, A.B. Comprehensive review on solar, wind and hybrid wind-PV water pumping systems—An electrical engineering perspective. CPSS Trans. Power Electron. Appl. 2021, 6, 1–19. [Google Scholar] [CrossRef]
- Errouha, M.; Derouich, A.; Nahid-Mobarakeh, B.; Motahhir, S.; El Ghzizal, A. Improvement control of photovoltaic based water pumping system without energy storage. Solar Energy 2019, 190, 319–328. [Google Scholar] [CrossRef]
- Shukla, S.; Singh, B. MPPT control technique for solar powered direct torque control of induction motor drive with a robust speed and parameters adaptation scheme for water pumping. IET Renew. Power Gener. 2018, 13, 273–284. [Google Scholar] [CrossRef]
- Singh, B.; Sharma, U.; Kumar, S. Standalone Photovoltaic Water Pumping System Using Induction Motor Drive with Reduced Sensors. IEEE Trans. Ind. Appl. 2018, 54, 3645–3655. [Google Scholar] [CrossRef]
- Mudlapur, A.; Ramana, V.V.; Damodaran, R.V.; Balasubramanian, V.; Mishra, S. Effect of Partial Shading on PV Fed Induction Motor Water Pumping Systems. IEEE Trans. Energy Convers. 2019, 34, 530–539. [Google Scholar] [CrossRef]
- Shukla, S.; Singh, B. Reduced Current Sensor Based Solar PV Fed Motion Sensorless Induction Motor Drive for Water Pumping. IEEE Trans. Ind. Inform. 2019, 15, 3973–3986. [Google Scholar] [CrossRef]
- Muljadi, E.; Nix, G.; Bialasiewicz, J.T. Analysis of the dynamics of a wind-turbine water-pumping system. IEEE Trans. Power Eng. Soc. Summer Meet. 2000, 4, 2506–2519. [Google Scholar] [CrossRef]
- Bialasiewicz, J.T.; Muljadi, E. Power transfer and time-domain analysis of a wind-turbine water-pumping system. IEEE Trans. Ind. Appl. 2003, 2, 1302–1307. [Google Scholar] [CrossRef]
- Miranda, M.S.; Lyra, R.O.; Silva, S.R. An alternative isolated wind electric pumping system using induction machines. IEEE Trans. Energy Convers. 1999, 14, 1611–1616. [Google Scholar] [CrossRef]
- Rhouma, A.B.; Belhadj, J.; Roboam, X. A pumping system fed by hybrid photovoltaic-wind sources without battery storage Bond graph modeling, control and energy management. In Proceedings of the IMAACA 2010: The 4th International Conference on Integrated Modeling and Analysis in Applied Control and Automation, Fès, Morocco, 13–15 October 2010; pp. 67–72. [Google Scholar]
- Abidi, M.; Rhouma, A.B.; Belhadj, J. Optimal coordinated planning of water-energy system-based MILP algorithm of a multi-pump PV water station by deeming power commitment. Electr. Power Syst. Res. 2023, 220, 109343. [Google Scholar] [CrossRef]
- Software for Modeling Complex Physics. Available online: https://www.20sim.com/ (accessed on 1 August 2023).
- Rhouma, A.B.; Belhadj, J.; Robaom, X. Theoretical and experimental investigation for “storage less” control of a water pumping system fed by intermittent renewable sources. In Proceedings of the 1st International Workshop on Simulation for Energy, Sustainable Development and Environment, SESDE 2013, Athens, Greece, 25–27 September 2013; pp. 7–11. [Google Scholar]
- Rhouma, A.B.; Belhadj, J.; Roboam, X. Energy management and control strategy for water pumping system fed by intermittent renewable sources. In Proceedings of the 12th International Conference on Modeling and Simulation of Electric Machines, Converters and Systems (ELECTRIMACS’2017), Toulouse, France, 4–6 July 2017. [Google Scholar]
- Ali, I.B.; Turki, M.; Belhadj, J.; Roboam, X. Fuzzy Logic for Solving Water-Energy Management Problem in Standalone Water Desalination System: Water-Energy Nexus and Fuzzy System Design. Int. J. Fuzzy Syst. Appl. 2023, 12, 1–28. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ben Rhouma, A.; Roboam, X.; Belhadj, J.; Sareni, B. Improved Control Strategy for Water Pumping System Fed by Intermittent Renewable Source. Energies 2023, 16, 7593. https://doi.org/10.3390/en16227593
Ben Rhouma A, Roboam X, Belhadj J, Sareni B. Improved Control Strategy for Water Pumping System Fed by Intermittent Renewable Source. Energies. 2023; 16(22):7593. https://doi.org/10.3390/en16227593
Chicago/Turabian StyleBen Rhouma, Amine, Xavier Roboam, Jamel Belhadj, and Bruno Sareni. 2023. "Improved Control Strategy for Water Pumping System Fed by Intermittent Renewable Source" Energies 16, no. 22: 7593. https://doi.org/10.3390/en16227593