
Optimized Distributed Cooperative Control for Islanded Microgrid Based on Dragonfly Algorithm

Abstract
:1. Introduction
- A novel SDCC for optimal voltage and frequency restoration and active and reactive power sharing is proposed in this study. This approach to therapy is based on PR and virtual impedance droop control in stationary reference frames and intelligent distributed SC optimized by the dragonfly algorithm.
- The paper examines the impact of computational budget limits and the deployment of optimization strategies on resource consumption, ultimately leading to optimal efficiency.
- The article aims to enhance system performance and reduce resource demands by developing precise models that are compatible with constrained processors and using optimization strategies.
- Evaluating the effectiveness of the technique through a comparative analysis of the system’s resilience in the event of communication loss and its reliability during plug-and-play operation.
2. Preliminaries and MG Control Review
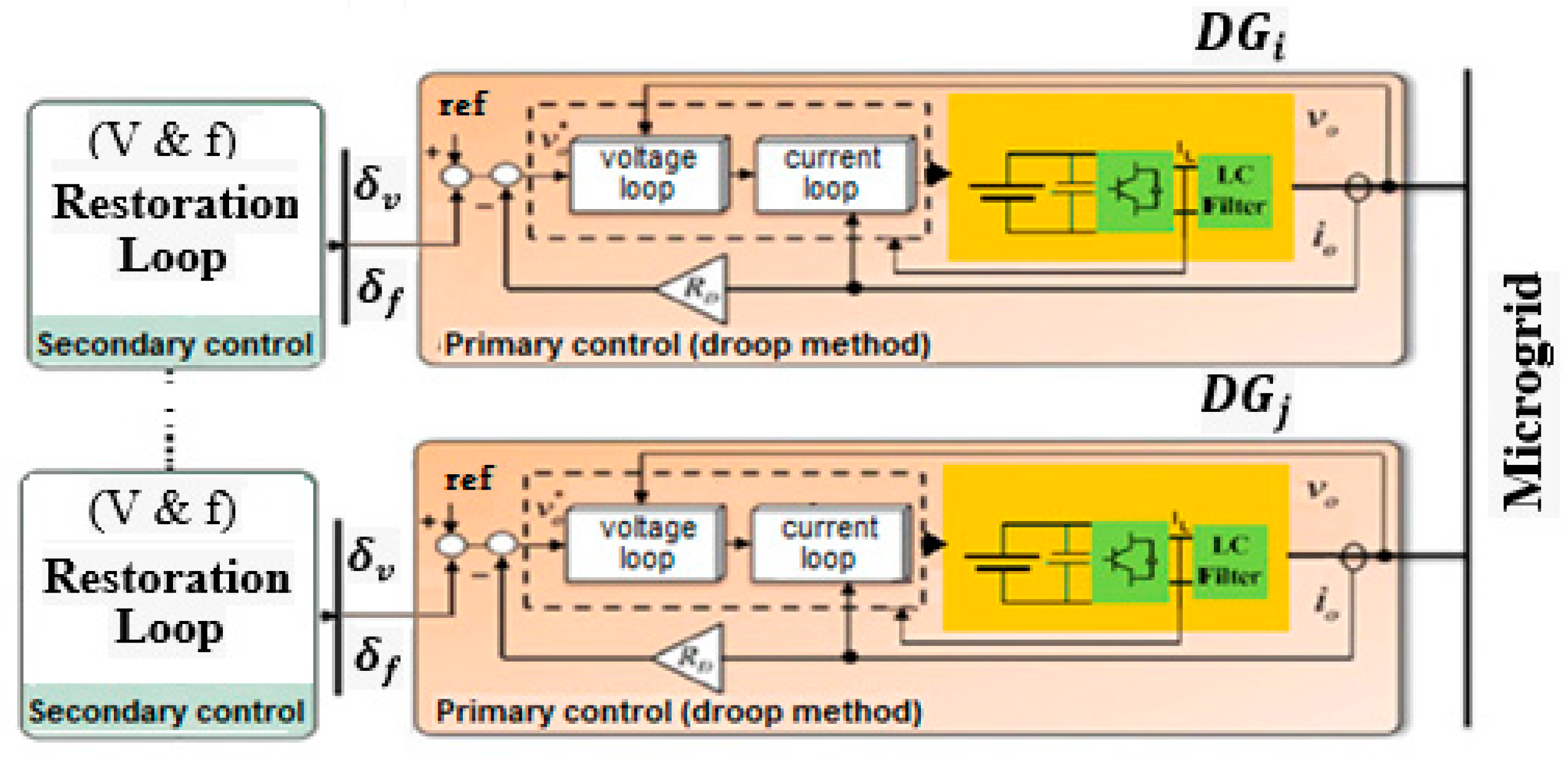
2.1. Primary Level Review
2.2. Cooperative Control Objective
2.3. Secondary Level Review
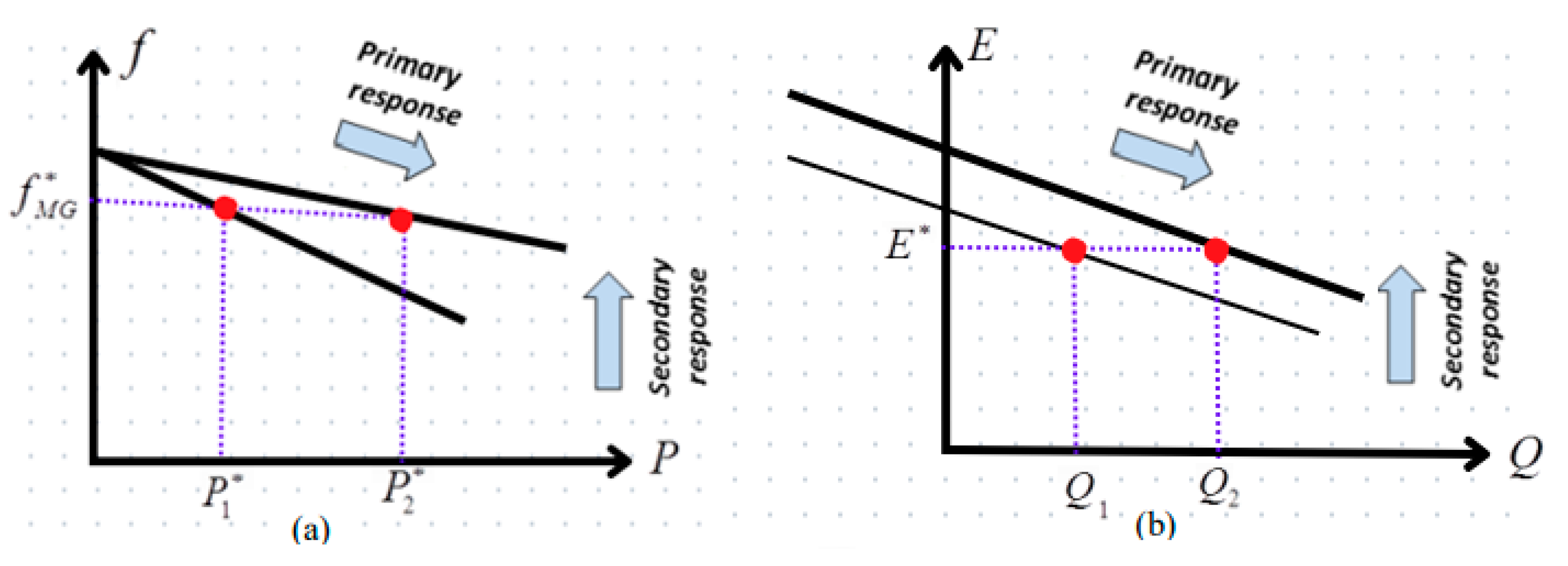
2.3.1. Frequency Control
2.3.2. Voltage Control
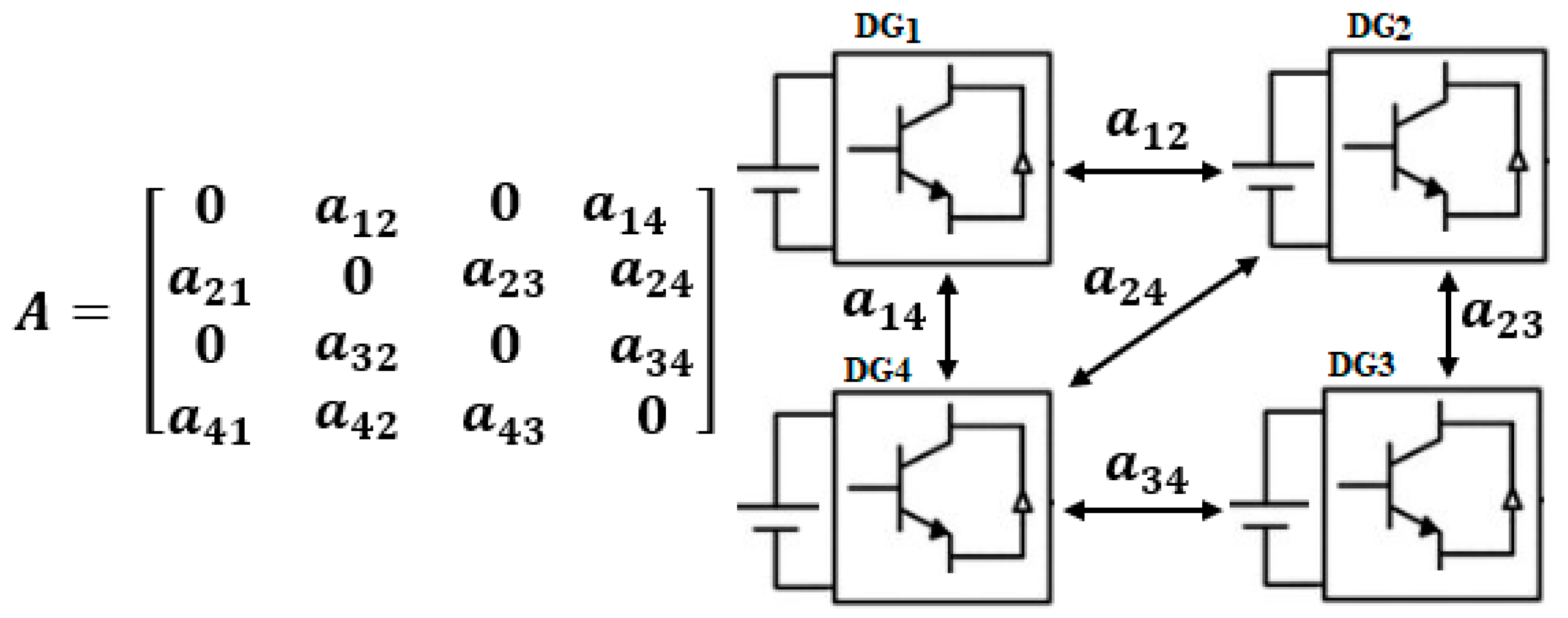
2.4. Graph Theory Concept
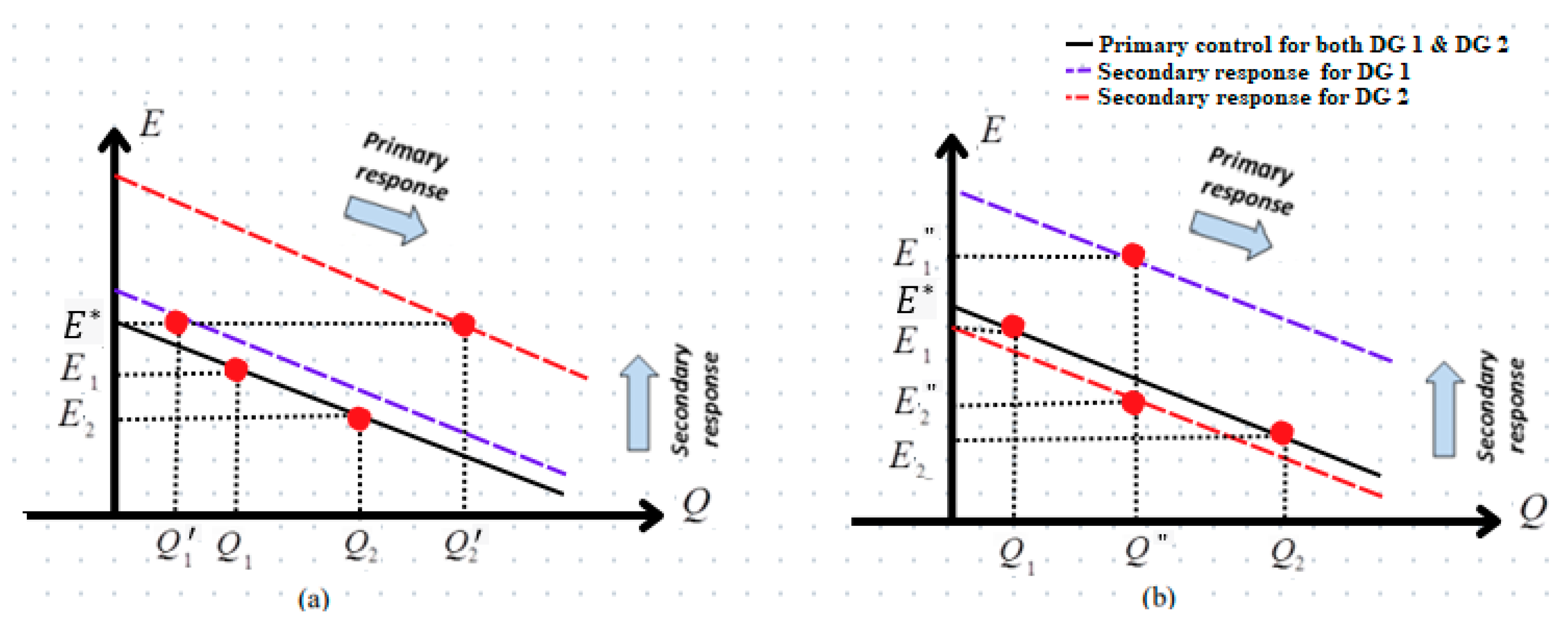
3. Voltage Control Restrictions
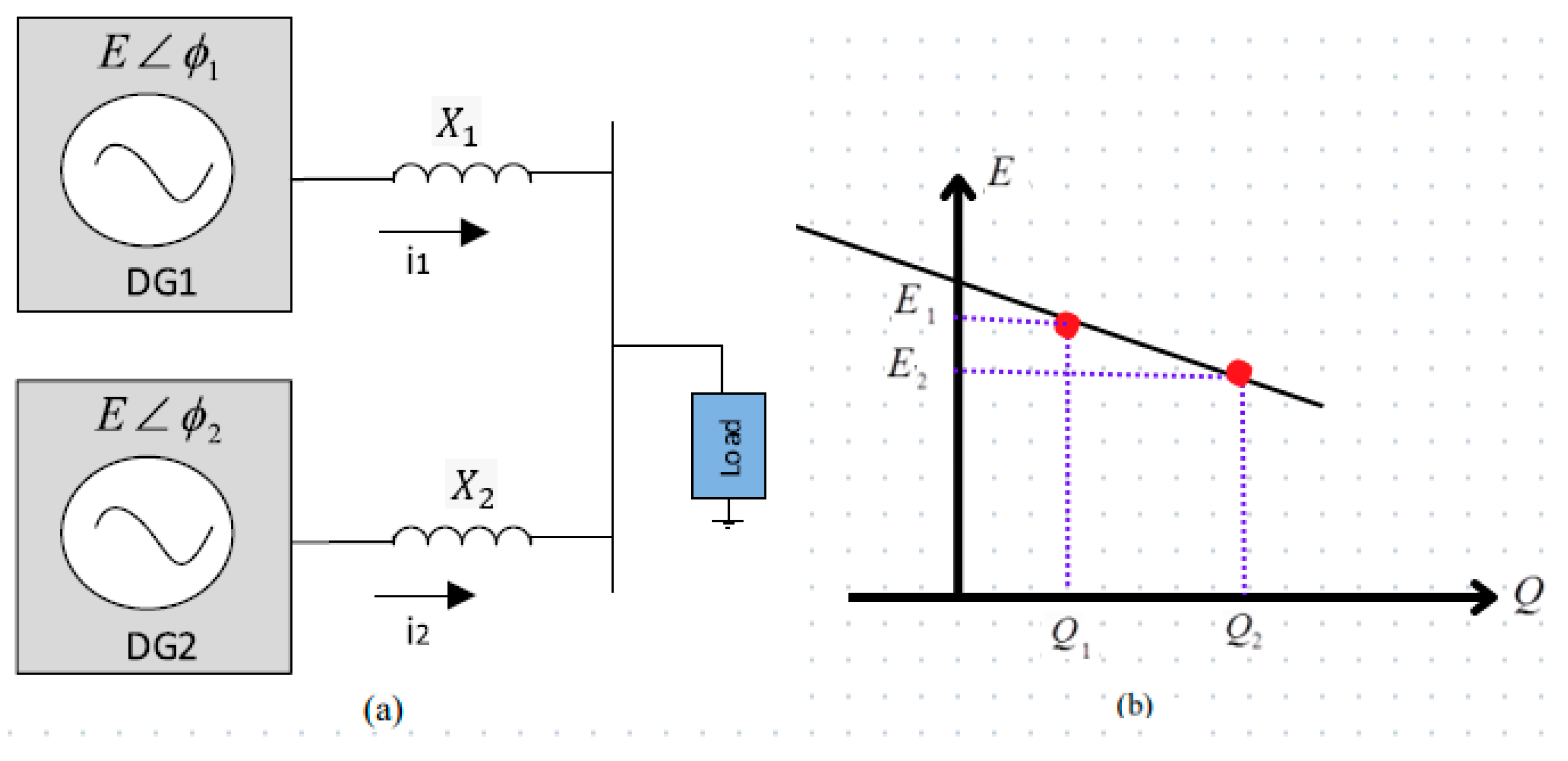
3.1. Standard Secondary Control and E-Q Droop without Power Sharing
3.2. Secondary Control and E-Q Droop with Power Sharing
4. Methodology: Stochastic Distributed Cooperative Control (SDCC)
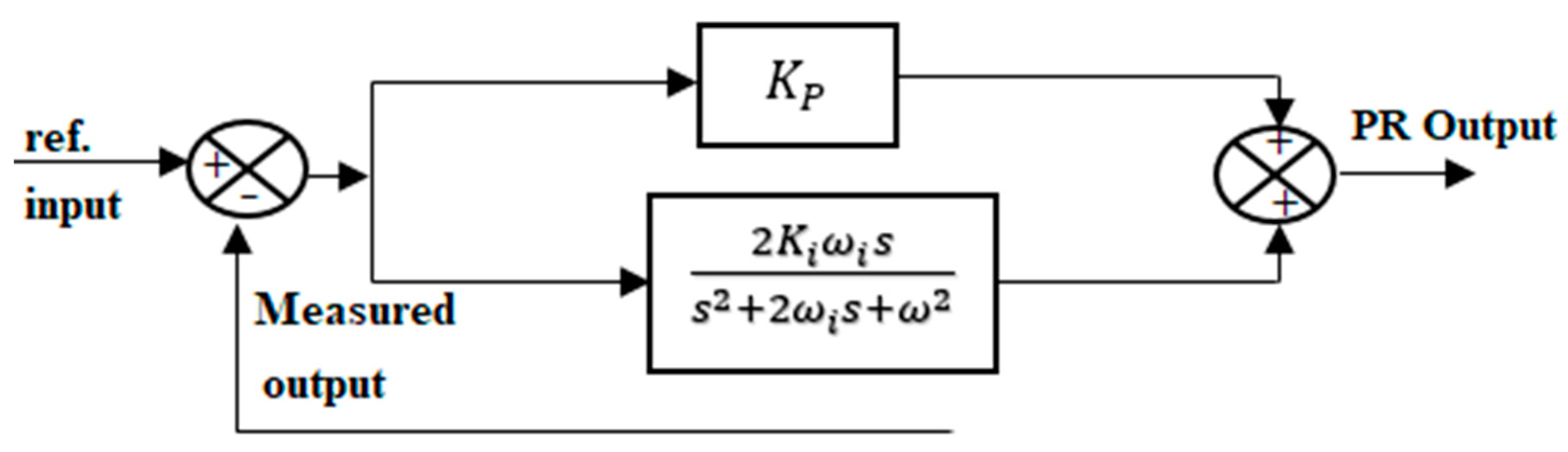
4.1. Proportional Resonant (PR) Droop Control in Stationary Reference
4.2. Virtual Impedance Loop and Droop Control in Stationary Reference
4.3. Intelligent Distributed Secondary Control Design
4.3.1. Dragonfly Algorithm
| Algorithm 1: DA representation Pseudocode [27] | ||
| Initially, the dragonfly population is denoted by the notation | ||
| Commence with the step vectors , where i ranges from 1 to n. | ||
| while termination requirement has not been fulfilled. | ||
| Calculate the objective values for each individual dragonfly. | ||
| Upgrade the adversary, as well as the source of food. | ||
| Upgrade the adjustable settings s, a, c, f, e, w. | ||
| Estimate the output of the Equations (32)–(36). | ||
| Upgrade the radius of the adjacent region. | ||
| if At least one dragonfly is in the neighborhood | ||
| The velocity vector computation is carried out according to Equation (37) | ||
| The position vector is updated according to Equation (38) | ||
| else | ||
| The position vector is updated according to Equation (39) | ||
| end | ||
| The new positions are confirmed and rectified by boundaries. | ||
| End | ||
| The best dragonfly is saved in order to use in simulation | ||
4.3.2. Intelligent Distributed Secondary Control Optimized by Dragonfly Algorithm
4.3.3. Optimization Objective Functions
Frequency Objective Function
Voltage and Reactive Power Objective Functions
5. Experimental Results and Discussion
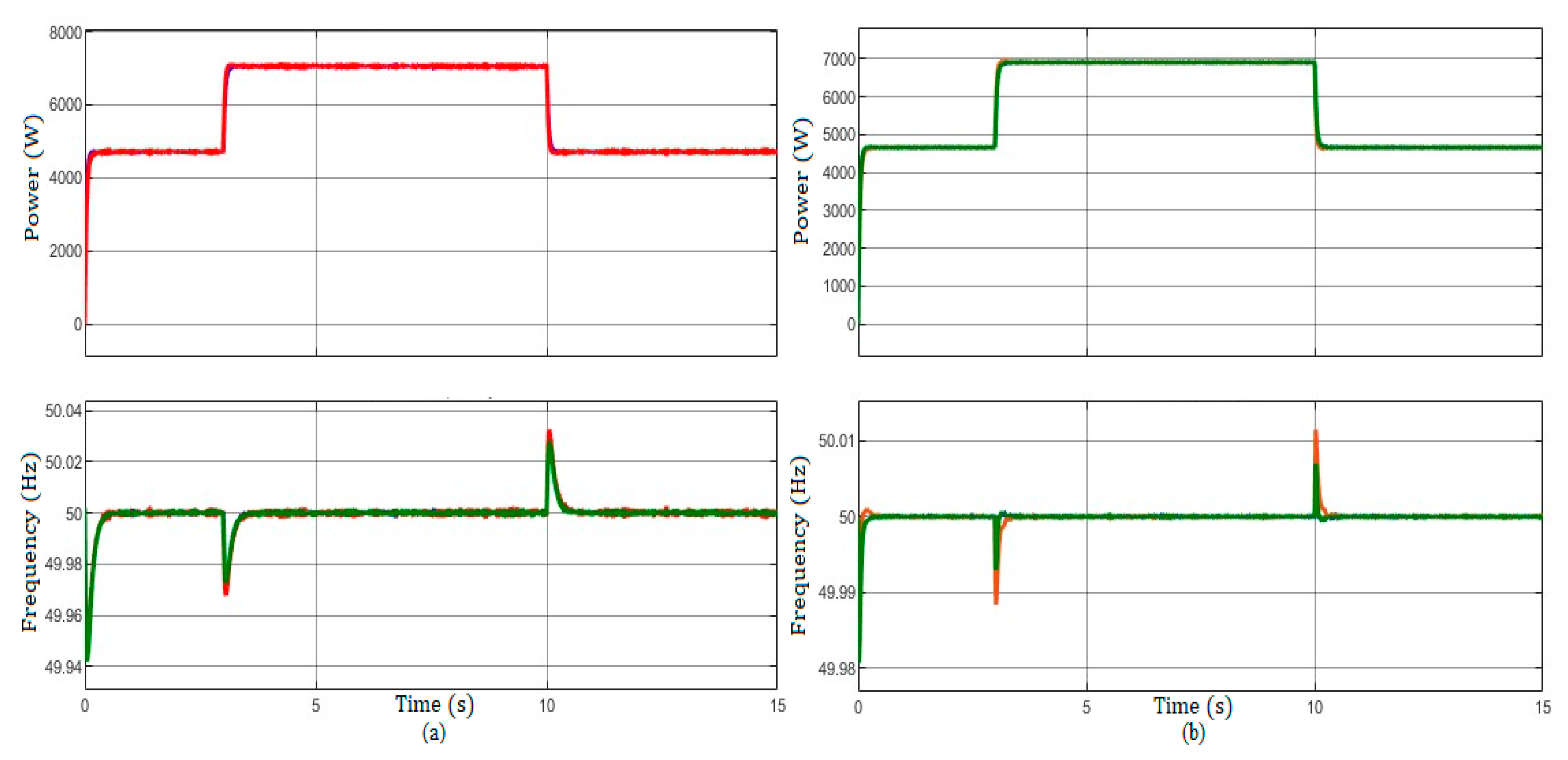
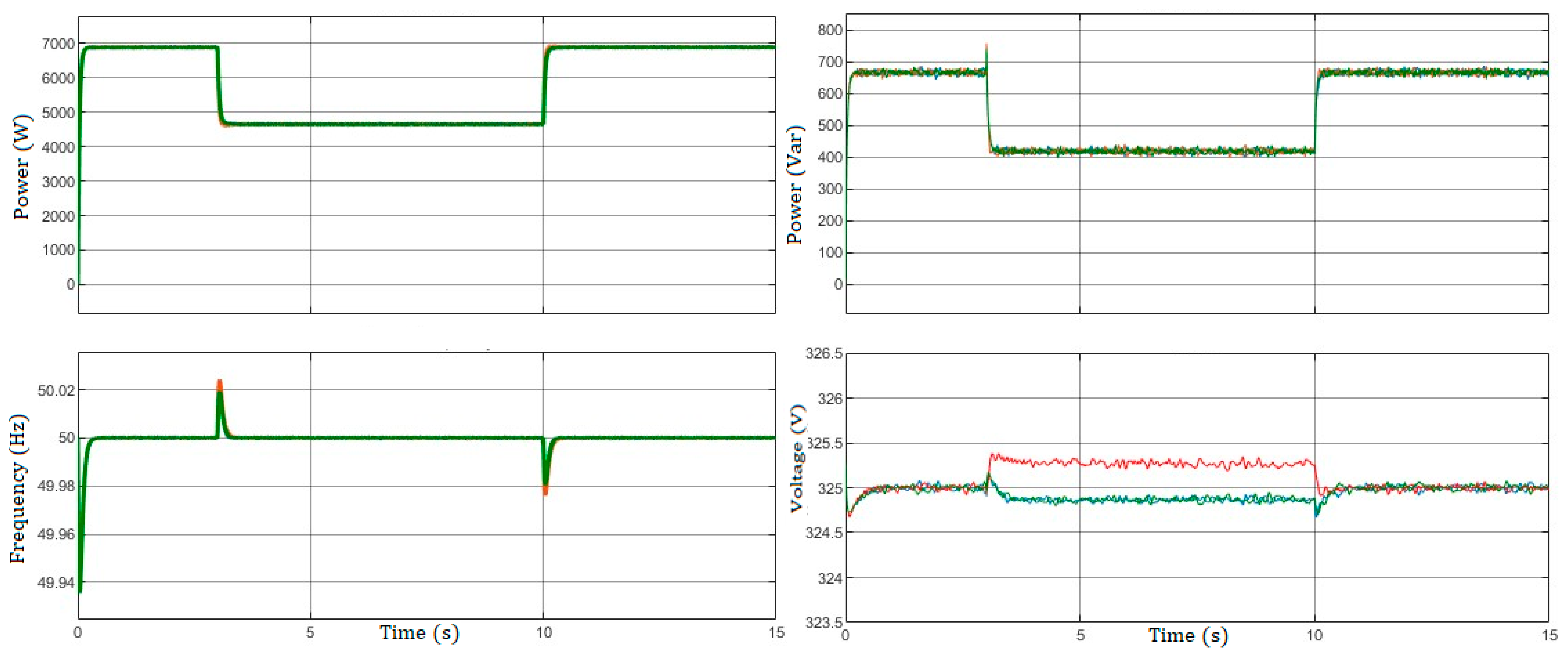
5.1. Active Power and Frequency Evaluation
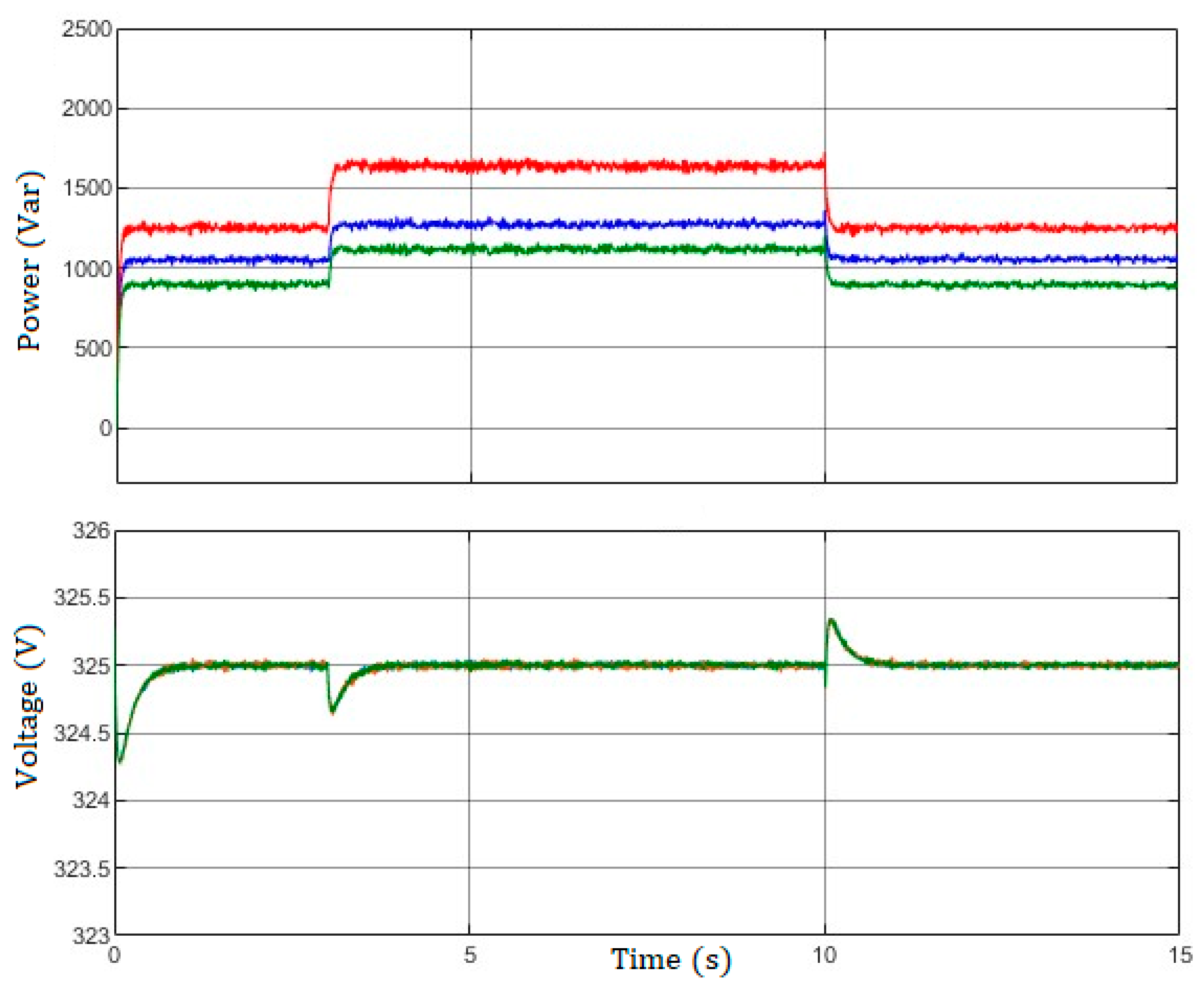
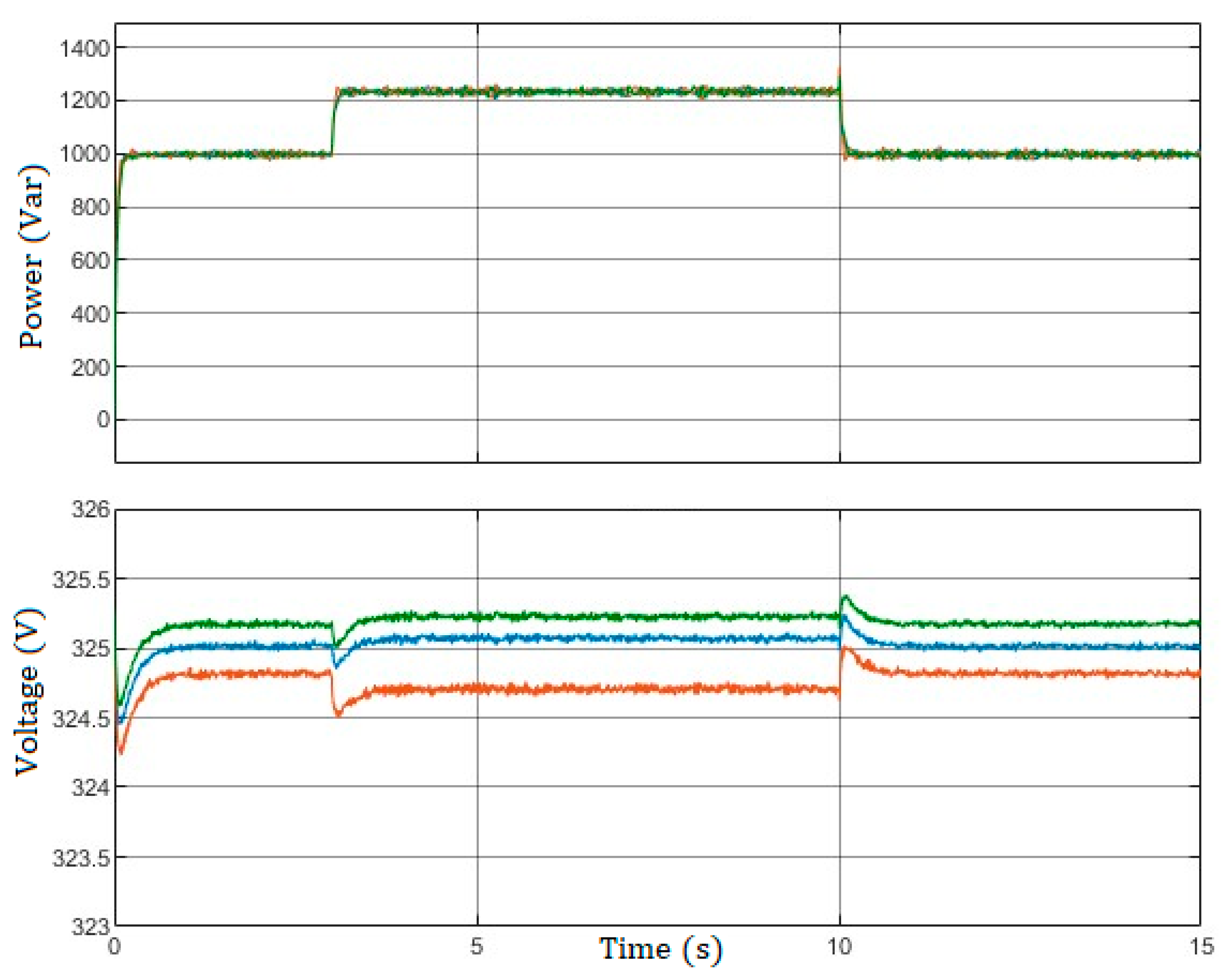
5.2. Reactive Power and Voltage Evaluation
5.2.1. Adjusting for the Equitable Regulation of Voltage
5.2.2. Adjusting for the Equitable Distribution of Reactive Power
5.2.3. Balancing Voltage and Reactive Power for Optimal Equity
5.3. Communication Connection Failure
5.4. Plug and Play Study
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zolfaghari, M.; Gharehpetian, G.B.; Shafie-khah, M.; Catalão, J.P.S. Comprehensive review on the strategies for controlling the interconnection of AC and DC microgrids. Int. J. Electr. Power Energy Syst. 2022, 136, 107742. [Google Scholar] [CrossRef]
- Morstyn, T.; Hredzak, B.; Agelidis, V.G. Control Strategies for Microgrids with Distributed Energy Storage Systems: An Overview. IEEE Trans. Smart Grid 2018, 9, 3652–3666. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids—A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Khorsandi, A.; Baghaee, H.R.; Sadati, N.; Moghaddam, S.S.; Guerrero, J.M. Voltage and Frequency Consensusability of Autonomous Microgrids Over Fading Channels. IEEE Trans. Energy Convers. 2021, 36, 149–158. [Google Scholar] [CrossRef]
- Khayat, Y.; Shafiee, Q.; Heydari, R.; Naderi, M.; Dragicevic, T.; Simpson-Porco, J.W.; Dorfler, F.; Fathi, M.; Blaabjerg, F.; Guerrero, J.M.; et al. On the Secondary Control Architectures of AC Microgrids: An Overview. IEEE Trans. Power Electron. 2020, 35, 6482–6500. [Google Scholar] [CrossRef]
- Saeed, A.T.; Taha, M.Q.; Ahmed, A.K. Tracking technique for the sudden change of PV inverter load. Int. J. Power Electron. Drive Syst. 2019, 10, 2076–2083. [Google Scholar] [CrossRef]
- Zhang, Z.; Babayomi, O.; Dragicevic, T.; Heydari, R.; Garcia, C.; Rodriguez, J.; Kennel, R. Advances and opportunities in the model predictive control of microgrids: Part I–primary layer. Int. J. Electr. Power Energy Syst. 2022, 134, 107411. [Google Scholar] [CrossRef]
- Shan, Y.; Ma, L.; Yu, X. Hierarchical Control and Economic Optimization of Microgrids Considering the Randomness of Power Generation and Load Demand. Energies 2023, 16, 5503. [Google Scholar] [CrossRef]
- Micallef, A.; Apap, M.; Spiteri-Staines, C.; Guerrero, J.M.; Vasquez, J.C. Reactive Power Sharing and Voltage Harmonic Distortion Compensation of Droop Controlled Single Phase Islanded Microgrids. IEEE Trans. Smart Grid 2014, 5, 1149–1158. [Google Scholar] [CrossRef]
- Javed, H.; Muqeet, H.A.; Shehzad, M.; Jamil, M.; Khan, A.A.; Guerrero, J.M. Optimal Energy Management of a Campus Microgrid Considering Financial and Economic Analysis with Demand Response Strategies. Energies 2021, 14, 8501. [Google Scholar] [CrossRef]
- Vinothine, S.; Widanagama Arachchige, L.N.; Rajapakse, A.D.; Kaluthanthrige, R. Microgrid Energy Management and Methods for Managing Forecast Uncertainties. Energies 2022, 15, 8525. [Google Scholar] [CrossRef]
- Li, Z.; Cheng, Z.; Liang, J.; Si, J.; Dong, L.; Li, S. Distributed Event-Triggered Secondary Control for Economic Dispatch and Frequency Restoration Control of Droop-Controlled AC Microgrids. IEEE Trans. Sustain. Energy 2020, 11, 1938–1950. [Google Scholar] [CrossRef]
- Ding, L.; Han, Q.-L.; Zhang, X.-M. Distributed Secondary Control for Active Power Sharing and Frequency Regulation in Islanded Microgrids Using an Event-Triggered Communication Mechanism. IEEE Trans. Ind. Inform. 2019, 15, 3910–3922. [Google Scholar] [CrossRef]
- Sun, W.; Fang, Z.; Huang, L.; Li, Q.; Li, W.; Xu, X. Distributed robust secondary control of islanded microgrid with stochastic time-varying delays and external disturbances. Int. J. Electr. Power Energy Syst. 2022, 143, 108448. [Google Scholar] [CrossRef]
- Che, L.; Liu, X.; Li, Z.; Wen, Y. False Data Injection Attacks Induced Sequential Outages in Power Systems. IEEE Trans. Power Syst. 2019, 34, 1513–1523. [Google Scholar] [CrossRef]
- Peng, C.; Sun, H.; Yang, M.; Wang, Y.-L. A Survey on Security Communication and Control for Smart Grids Under Malicious Cyber Attacks. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1554–1569. [Google Scholar] [CrossRef]
- Yu, L.; Shi, D.; Xu, G.; Guo, X.; Jiang, Z.; Jing, C. Consensus Control of Distributed Energy Resources in a Multi-Bus Microgrid for Reactive Power Sharing and Voltage Control. Energies 2018, 11, 2710. [Google Scholar] [CrossRef]
- Dong, J.; Gong, C.; Bao, J.; Zhu, L.; Hou, Y.; Wang, Z. Secondary-Frequency and Voltage-Regulation Control of Multi-Parallel Inverter Microgrid System. Energies 2022, 15, 8533. [Google Scholar] [CrossRef]
- Khayat, Y.; Naderi, M.; Shafiee, Q.; Batmani, Y.; Fathi, M.; Guerrero, J.M.; Bevrani, H. Decentralized Optimal Frequency Control in Autonomous Microgrids. IEEE Trans. Power Syst. 2019, 34, 2345–2353. [Google Scholar] [CrossRef]
- Lou, G.; Gu, W.; Wang, L.; Xu, B.; Wu, M.; Sheng, W. Decentralized secondary voltage and frequency control scheme for islanded microgrid based on adaptive state estimator. IET Gener. Transmiss. Distrib. 2017, 11, 3683–3693. [Google Scholar] [CrossRef]
- Malek, H.; Dadras, S.; Yin, C.; Chen, Y. Fractional Order Proportional-Resonant Controller. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 3086–3091. [Google Scholar]
- Heydari, R.; Dragicevic, T.; Blaabjerg, F. High-bandwidth secondary voltage and frequency control of VSC-based AC microgrid. IEEE Trans. Power Electron. 2019, 34, 11320–11331. [Google Scholar] [CrossRef]
- Zhang, Y.; Shotorbani, A.M.; Wang, L.; Mohammadi-Ivatloo, B. Distributed secondary control of a microgrid with a generalized pi finite-time controller. IEEE Open Access J. Power Energy 2021, 8, 57–67. [Google Scholar] [CrossRef]
- Shan, Y.; Hu, J.; Chan, K.W.; Islam, S. A Unified Model Predictive Voltage and Current Control for Microgrids with Distributed Fuzzy Cooperative Secondary Control. IEEE Trans. Ind. Inform. 2021, 17, 8024–8034. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, H.; Gu, W.; Xu, Y.; Li, Z. Optimal distributed control for secondary frequency and voltage regulation in an islanded microgrid. IEEE Trans. Ind. Inform. 2019, 15, 225–235. [Google Scholar] [CrossRef]
- Sharbafi, M.A.; Lucas, C.; Daneshvar, R. Motion Control of Omni-Directional Three-Wheel Robots by Brain-Emotional-Learning-Based Intelligent Controller. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2010, 40, 630–638. [Google Scholar] [CrossRef]
- Mirjalili, S. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2016, 27, 1053–1073. [Google Scholar] [CrossRef]
- Asadi, Y.; Eskandari, M.; Mansouri, M.; Savkin, A.V.; Pathan, E. Frequency and Voltage Control Techniques through Inverter-Interfaced Distributed Energy Resources in Microgrids: A Review. Energies 2022, 15, 8580. [Google Scholar] [CrossRef]
- Heiba, B.; Yahya, A.M.; Taha, M.Q.; Khezam, N.; Mahmoud, A.K. Performance analysis of 30MW wind power plant in an operation mode in Nouakchott, Mauritania. Int. J. Power Electron. Drive Syst. 2021, 12, 532–541. [Google Scholar]
- Yang, Y.H.; Deng, C.; Xie, X.; Ding, L. Distributed Resilient Secondary Control for AC Microgrid Under FDI Attacks. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 2570–2574. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W.; Shafiee, Q.; Dörfler, F.; Vasquez, J.C.; Guerrero, J.M.; Bullo, F. Secondary Frequency and Voltage Control of Islanded Microgrids via Distributed Averaging. IEEE Trans. Ind. Electron. 2015, 62, 7025–7038. [Google Scholar] [CrossRef]
- Alkhafaji, A.S.; Trabelsi, H. Uses of Superconducting Magnetic Energy Storage Systems in Microgrids under Unbalanced Inductive Loads and Partial Shading Conditions. Energies 2022, 15, 8597. [Google Scholar] [CrossRef]
- Saeed, F.N.; Sultan, A.J. Hybrid PID-Fuzzy Controller for AGC in Two Thermal Area. J. Eng. Appl. Sci. 2018, 13, 9245–9251. [Google Scholar]
- Taha, M.Q.; Lpizra, M.A. Design a new PWM switching technique in multilevel converters. In Proceedings of the 2016 Annual Connecticut Conference on Industrial Electronics, Technology and Automation (CT-IETA), Bridgeport, CT, USA, 14 October 2016; pp. 1–4. [Google Scholar]
- Tayab, U.B.; Roslan, M.A.B.; Hwai, L.J.; Kashif, M. A review of droop control techniques for microgrid. Renew. Sustain. Energy Rev. 2017, 76, 717–727. [Google Scholar] [CrossRef]
- Rajanna, B.V.; Rao, G.J.; Shrivastava, S.K. Defining control strategies for micro grids islanded operation with maximum power point tracking using a fuzzy logic control scheme. Int. J. Power Electron. Drive Syst. 2016, 7, 723–733. [Google Scholar] [CrossRef]
- Vasquez, E.J.C.; Guerrero, J.M.; Savaghebi, M.; Eloy-Garcia, J.; Teodorescu, R. Modeling, Analysis, and Design of Stationary-Reference-Frame Droop-Controlled Parallel Three-Phase Voltage Source Inverters. IEEE Trans. Ind. Electron. 2013, 60, 1271–1280. [Google Scholar] [CrossRef]
- Li, Q.; Peng, C.; Chen, M.; Chen, F.; Kang, W.; Guerrero, J.M.; Abbott, D. Networked and Distributed Control Method with Optimal Power Dispatch for Islanded Microgrids. IEEE Trans. Ind. Electron. 2017, 64, 493–504. [Google Scholar] [CrossRef]
- Ferreira, D.; Silva, S.; Silva, W.; Brandao, D.; Bergna, G.; Tedeschi, E. Overview of Consensus Protocol and Its Application to Microgrid Control. Energies 2022, 15, 8536. [Google Scholar] [CrossRef]
- Mohammed, M.K.; Taha, M.Q.; Salih, F.F.; Saeed, F.N. Optimization and fault diagnosis of 132 kV substation low-voltage system using electrical transient analyzer program. Int. J. Electr. Comput. Eng. 2023, 13, 2375–2383. [Google Scholar] [CrossRef]
- Çelik, E. Design of new fractional order PI–fractional order PD cascade controller through dragonfly search algorithm for advanced load frequency control of power systems. Soft Comput. 2021, 25, 1193–1217. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Level | ||
|---|---|---|
| Primary | ||
| Secondary (s) | ||
| Power sharing (“) | - |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| System Data | |||
| AC voltage | 325.2 | V | |
| MG frequency | 50 | Hz | |
| Filter impedance | 0.5 | ||
| 5 | |||
| Output impedance | 0.065 | ||
| 1 | |||
| T. line impedance | 0.065 | ||
| 1 | |||
| Output inductance | C | 10 | |
| DC voltage | 800 | V | |
| PR controller gains for voltage/current | |||
| PR voltage loop | , | 10, 0.1 | |
| PR current loop | , | 10, 0.1 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-dulaimi, F.N.S.; Kurnaz, S. Optimized Distributed Cooperative Control for Islanded Microgrid Based on Dragonfly Algorithm. Energies 2023, 16, 7675. https://doi.org/10.3390/en16227675
Al-dulaimi FNS, Kurnaz S. Optimized Distributed Cooperative Control for Islanded Microgrid Based on Dragonfly Algorithm. Energies. 2023; 16(22):7675. https://doi.org/10.3390/en16227675
Chicago/Turabian StyleAl-dulaimi, Falah Noori Saeed, and Sefer Kurnaz. 2023. "Optimized Distributed Cooperative Control for Islanded Microgrid Based on Dragonfly Algorithm" Energies 16, no. 22: 7675. https://doi.org/10.3390/en16227675
APA StyleAl-dulaimi, F. N. S., & Kurnaz, S. (2023). Optimized Distributed Cooperative Control for Islanded Microgrid Based on Dragonfly Algorithm. Energies, 16(22), 7675. https://doi.org/10.3390/en16227675