
Optimization of Air Handler Controllers for Comfort Level in Smart Buildings Using Nature Inspired Algorithm

Abstract
:1. Introduction
- Optimization of air handler controllers;
- ACMV system modeling with thermal comfort, which illustrates how the NL-ARX method was used to create a nonlinear model based on the ACMV system’s thermal dynamics and energy behavioral patterns;
- Positioning of Temperature Sensors;
- Simulation Model;
- Optimization of ACMV Control System: This subsection describes how the FA and PSO methods were used to optimize the ACMV control system.
2. ACMV Related Algorithm and Thermal Comfort
2.1. Optimization Algorithms
2.2. Thermal Comfort
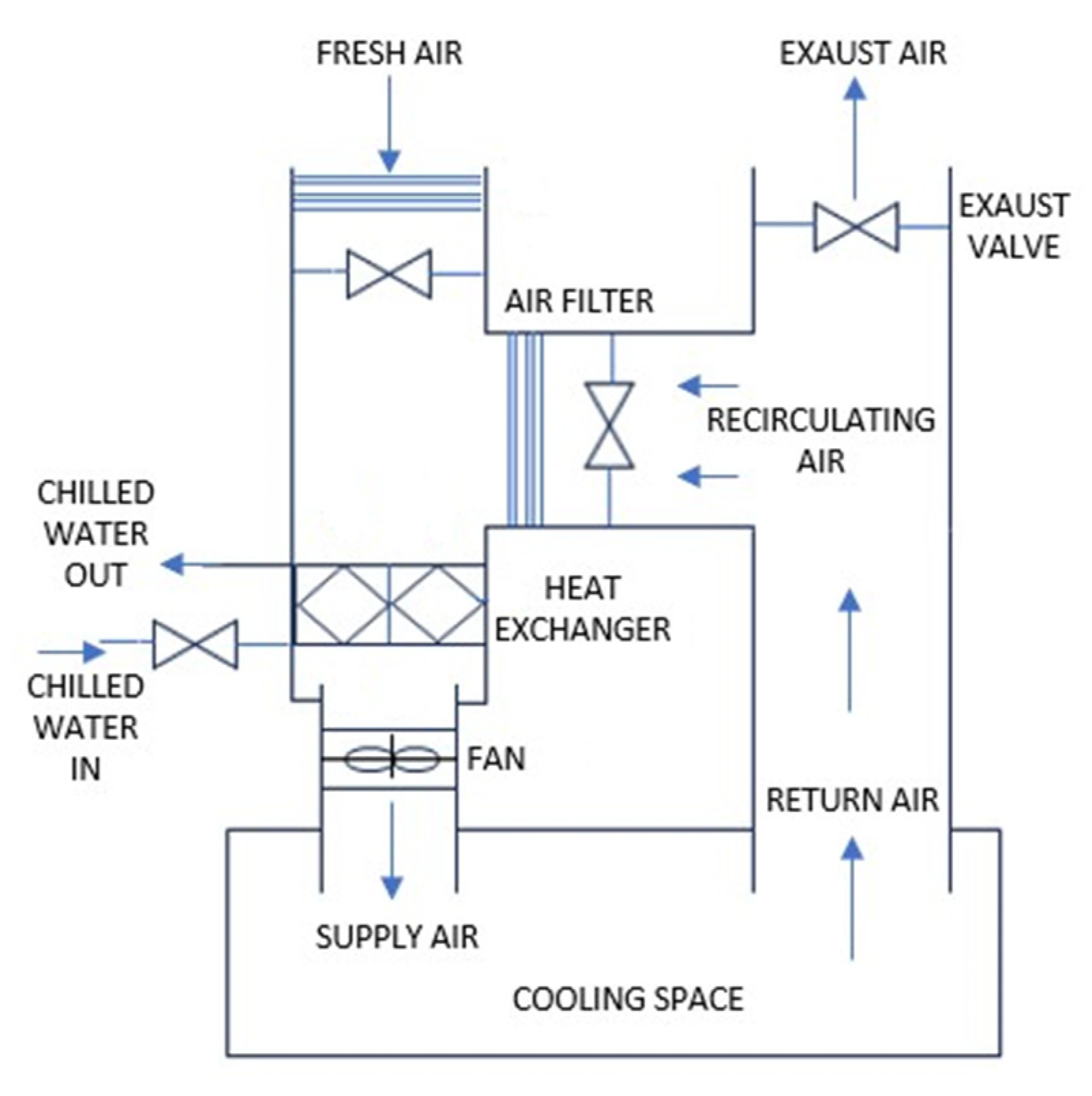
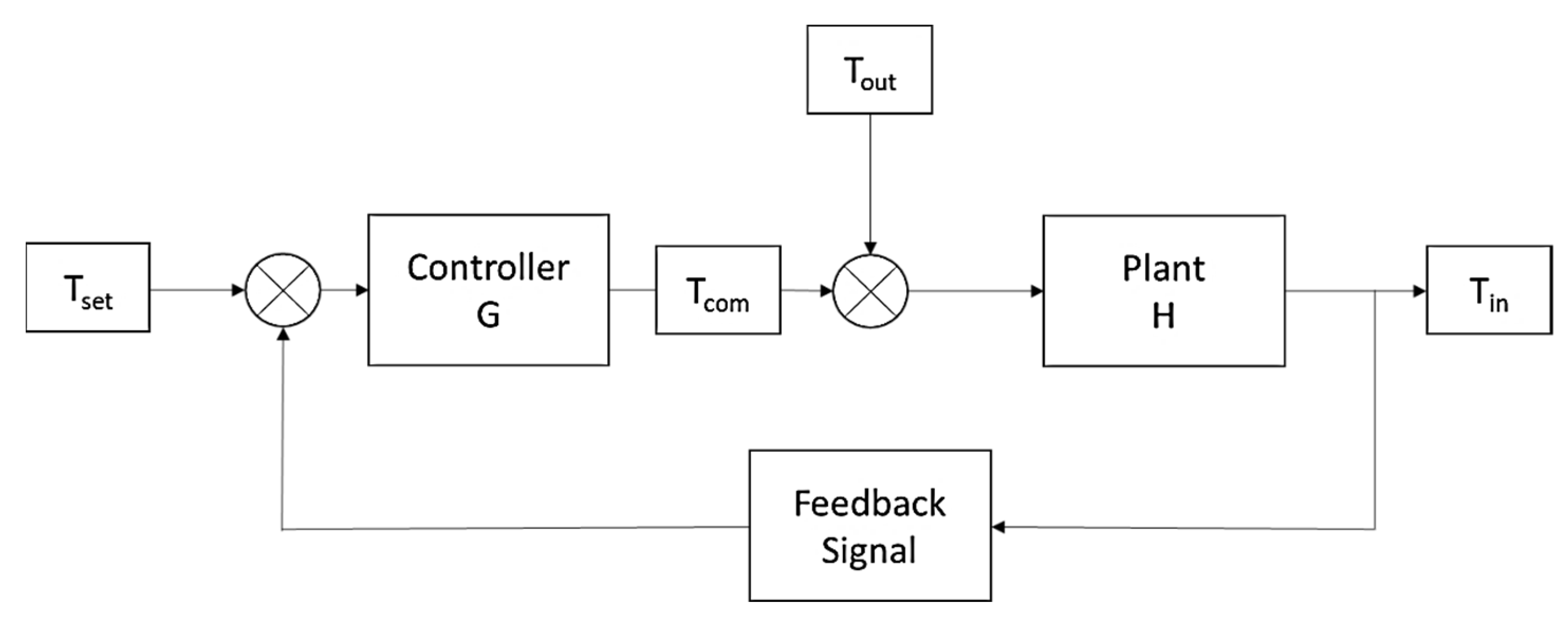
2.3. ACMV System
2.4. ACMV Modelling
2.5. NL-ARX
3. Air Handler Controller Optimization
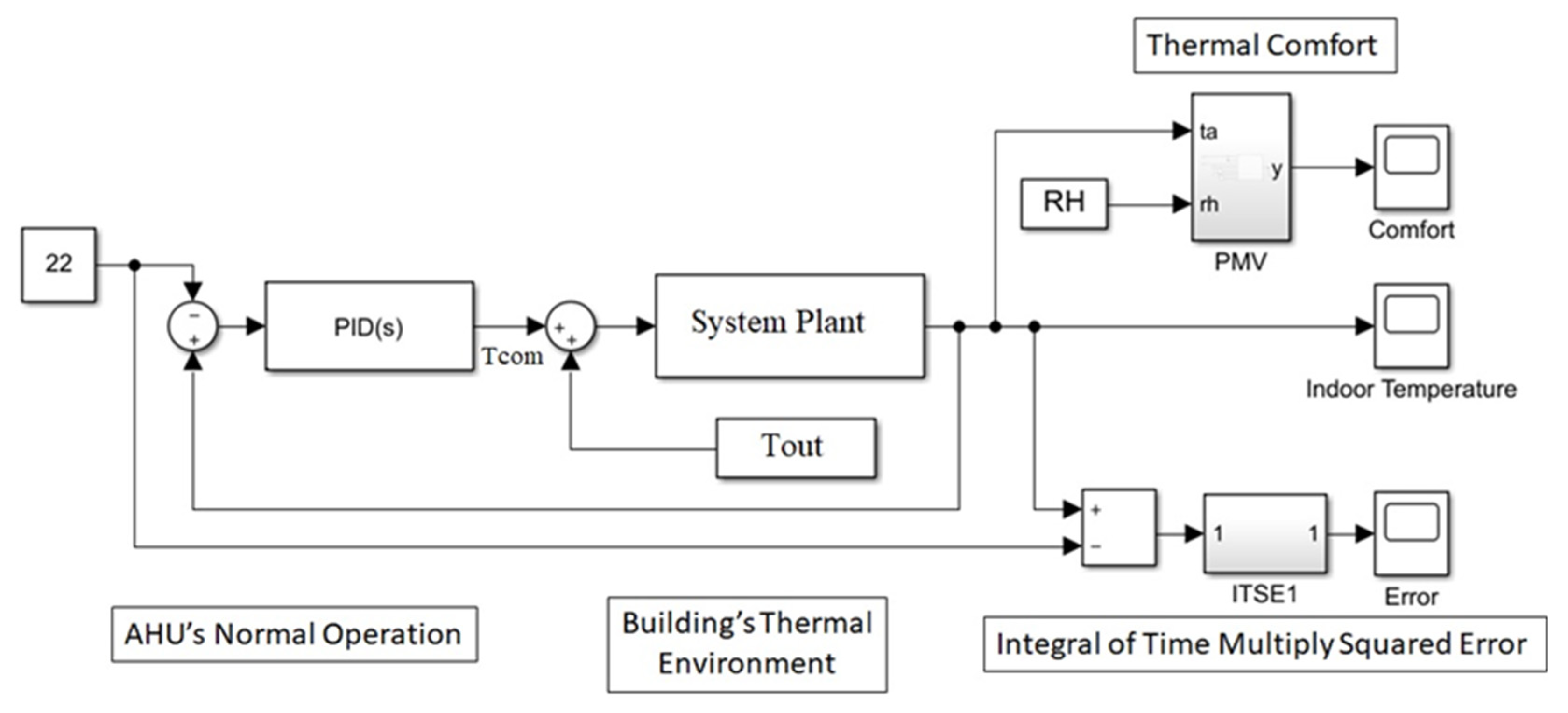
3.1. Modelling of ACMV Systems with Thermal Comfort
3.2. Temperature Sensors Placement
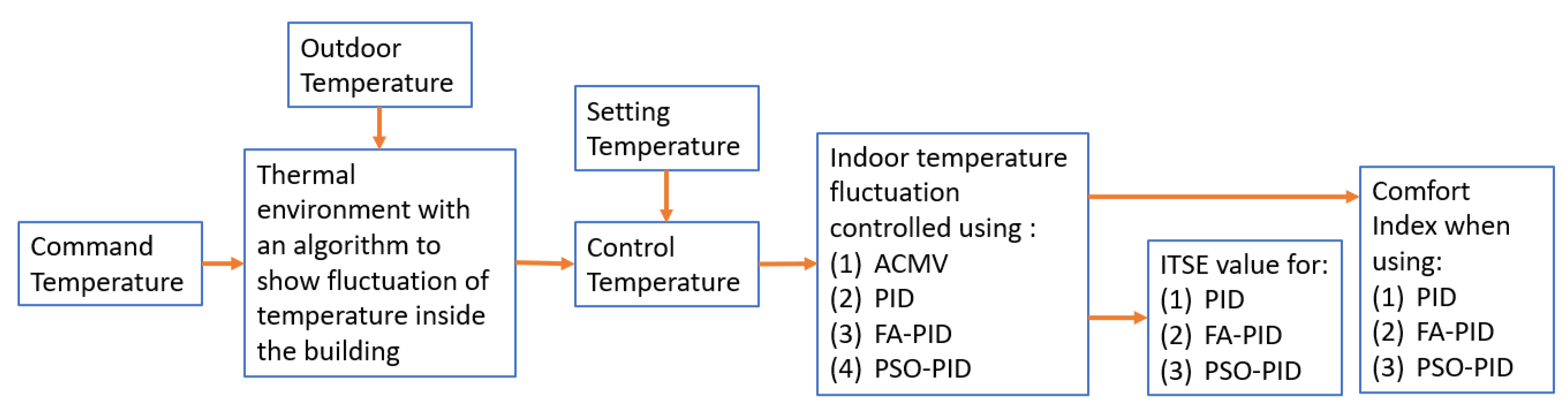
3.3. Simulation Model
3.4. Optimization of ACMV Control System
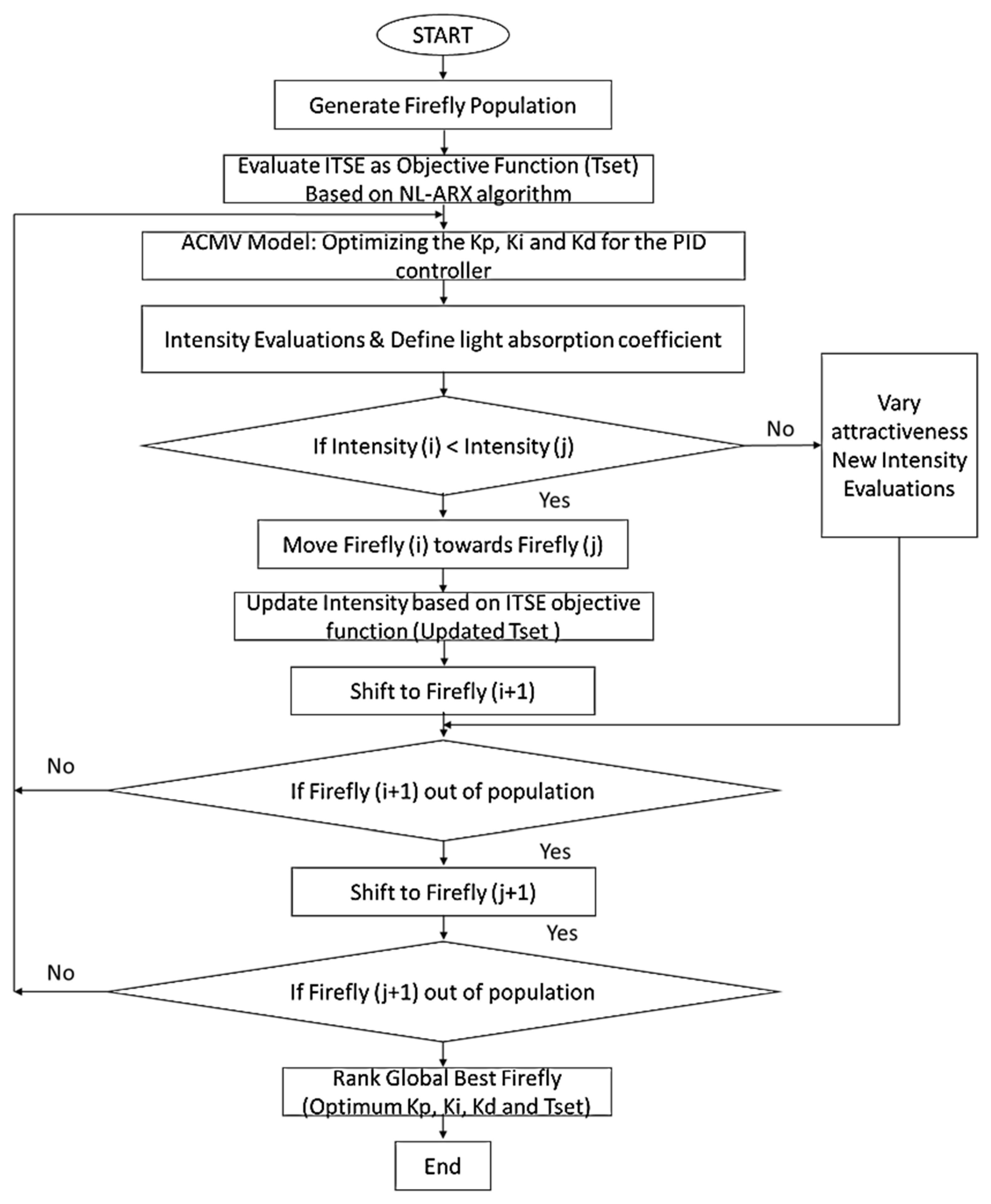
3.4.1. FA
- Fireflies, whether male or female, will constantly emit light to attract one another;
- The fireflies’ attraction is proportionate to their brightness. As a result, fireflies are drawn to and migrate in response to greater levels of light. As the distance between two light rises, the intensity of the light reduces;
- The resultant brightness level indicates the objective function’s value.
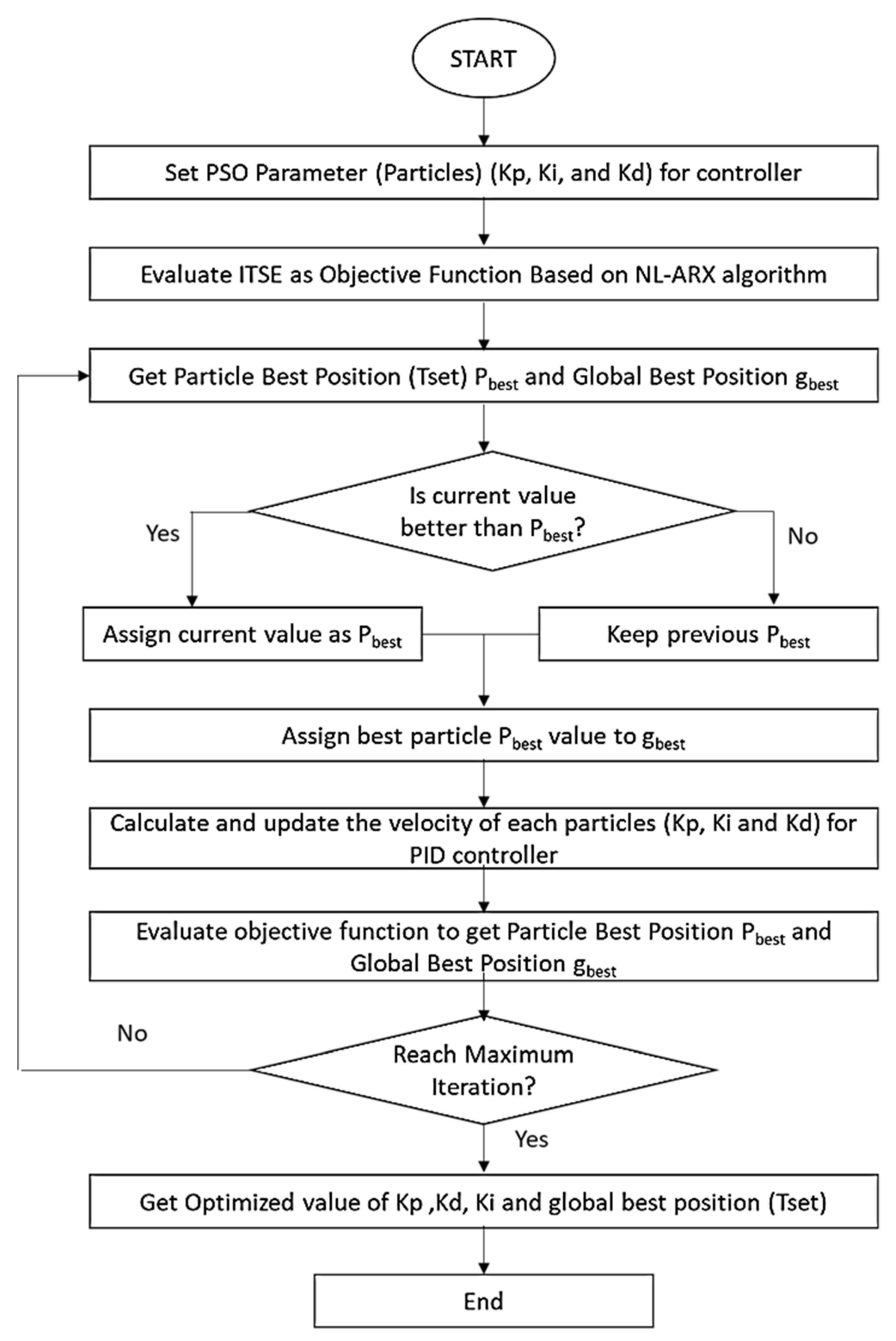
3.4.2. PSO
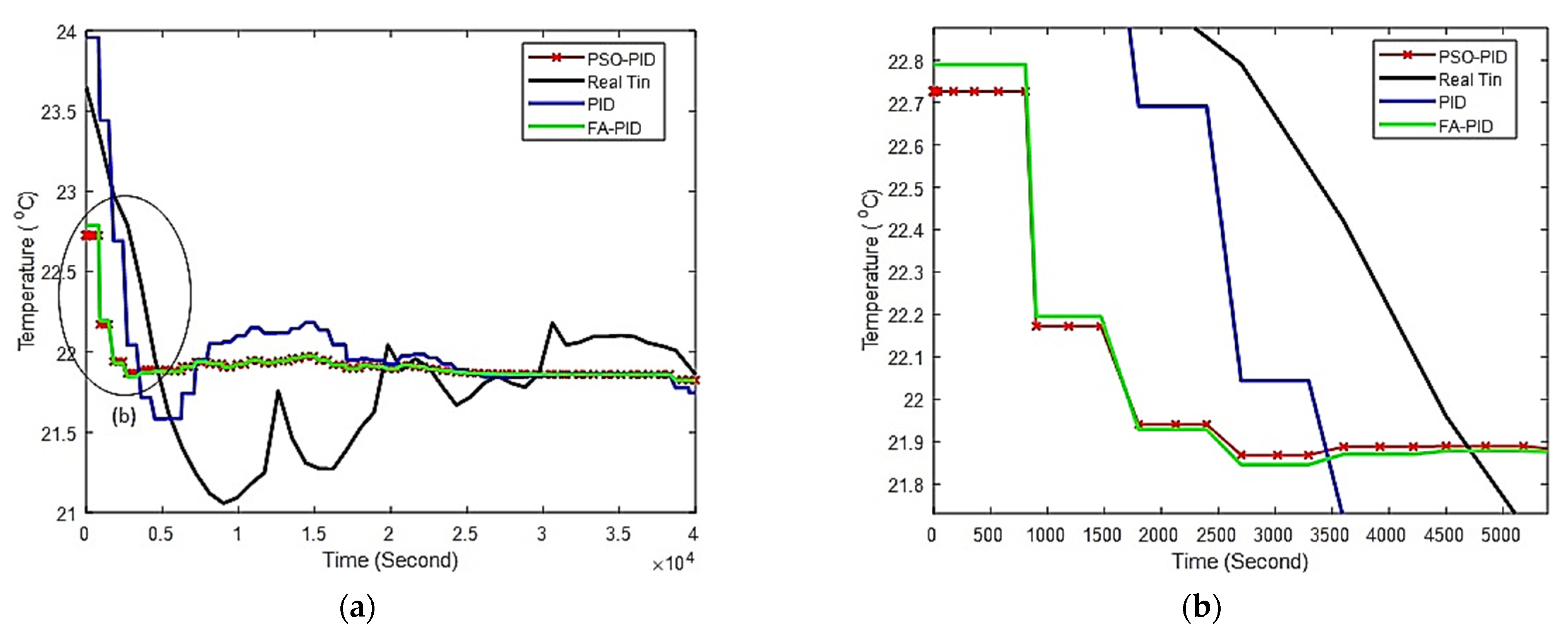
4. Results and Discussion
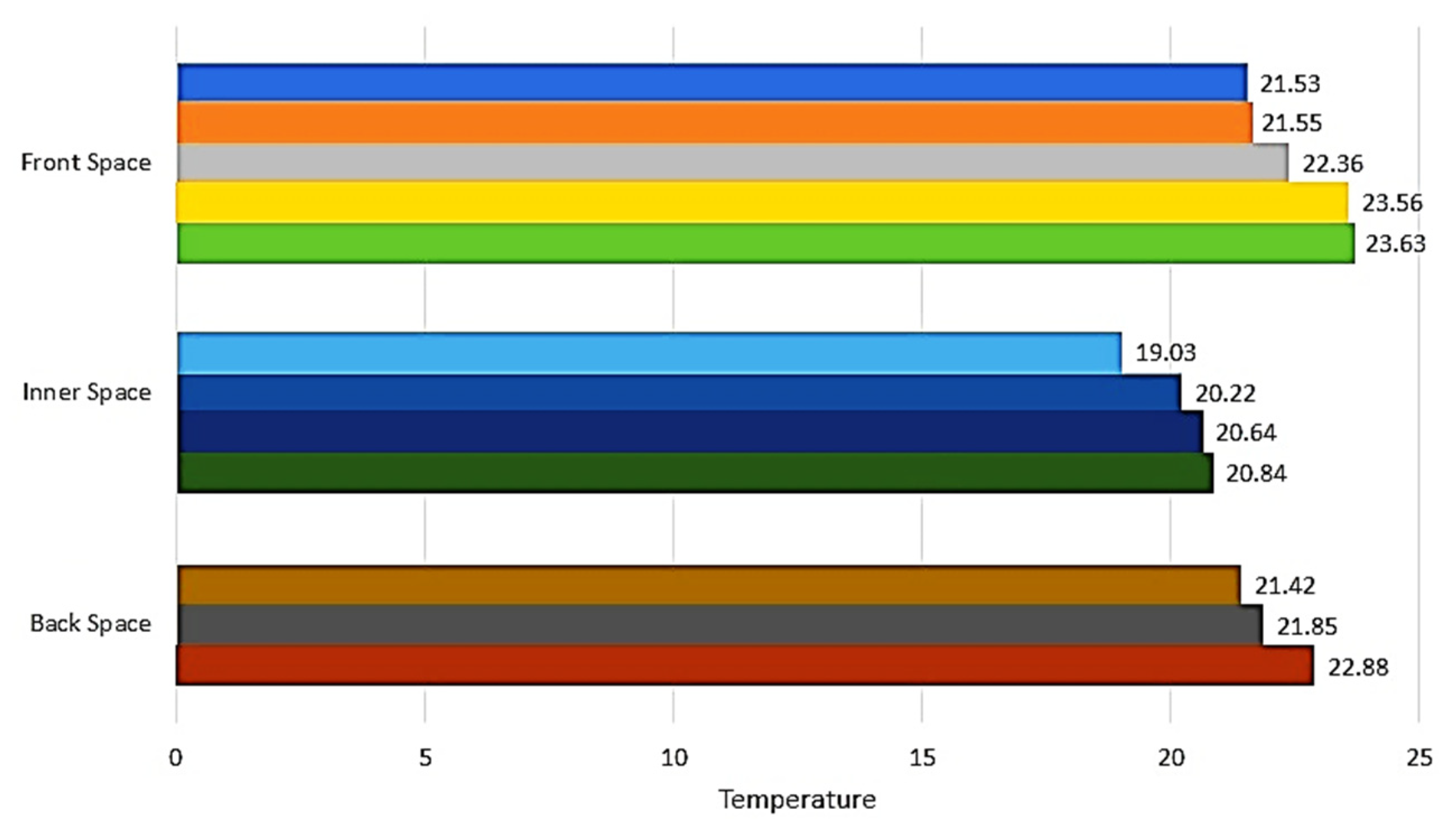
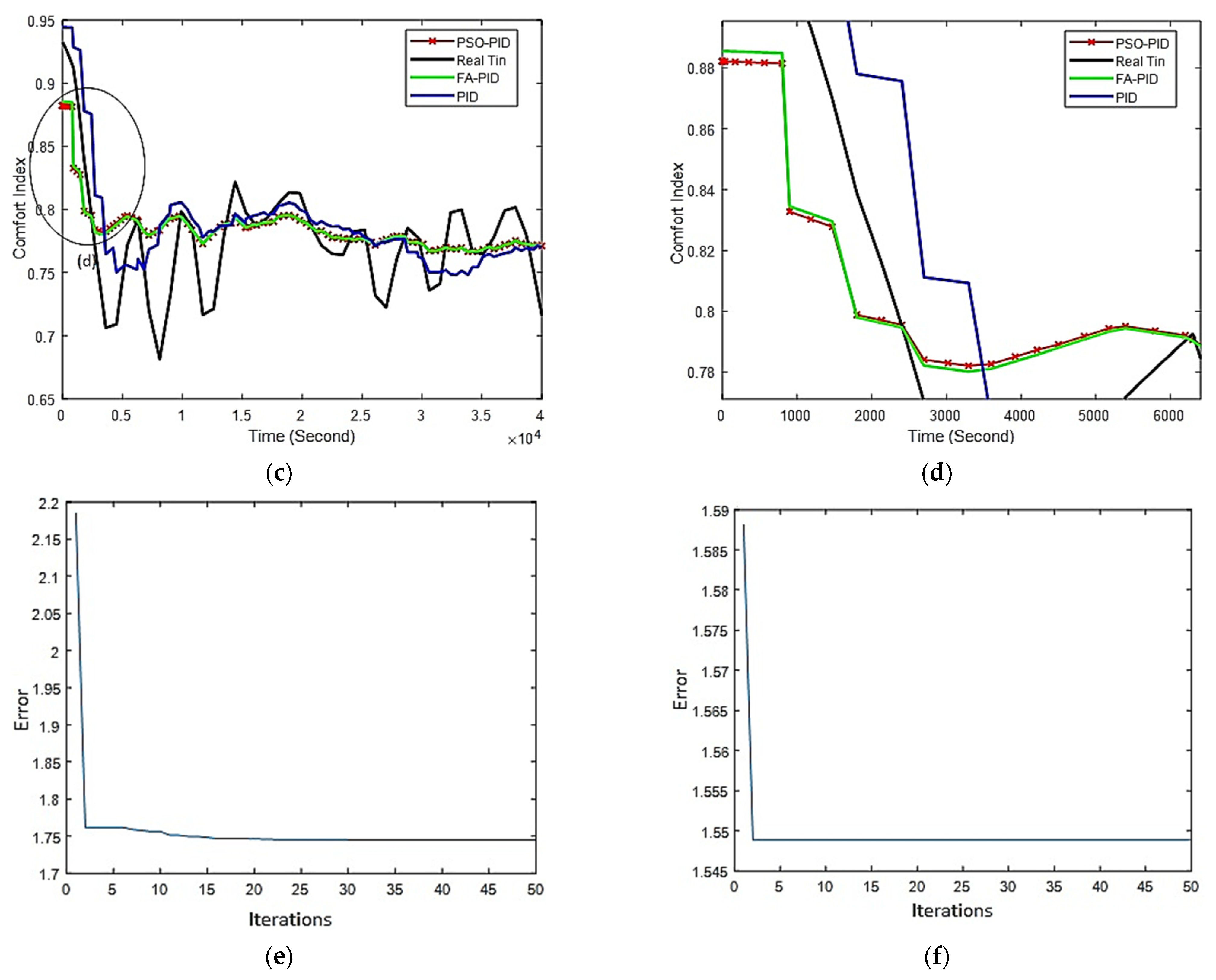
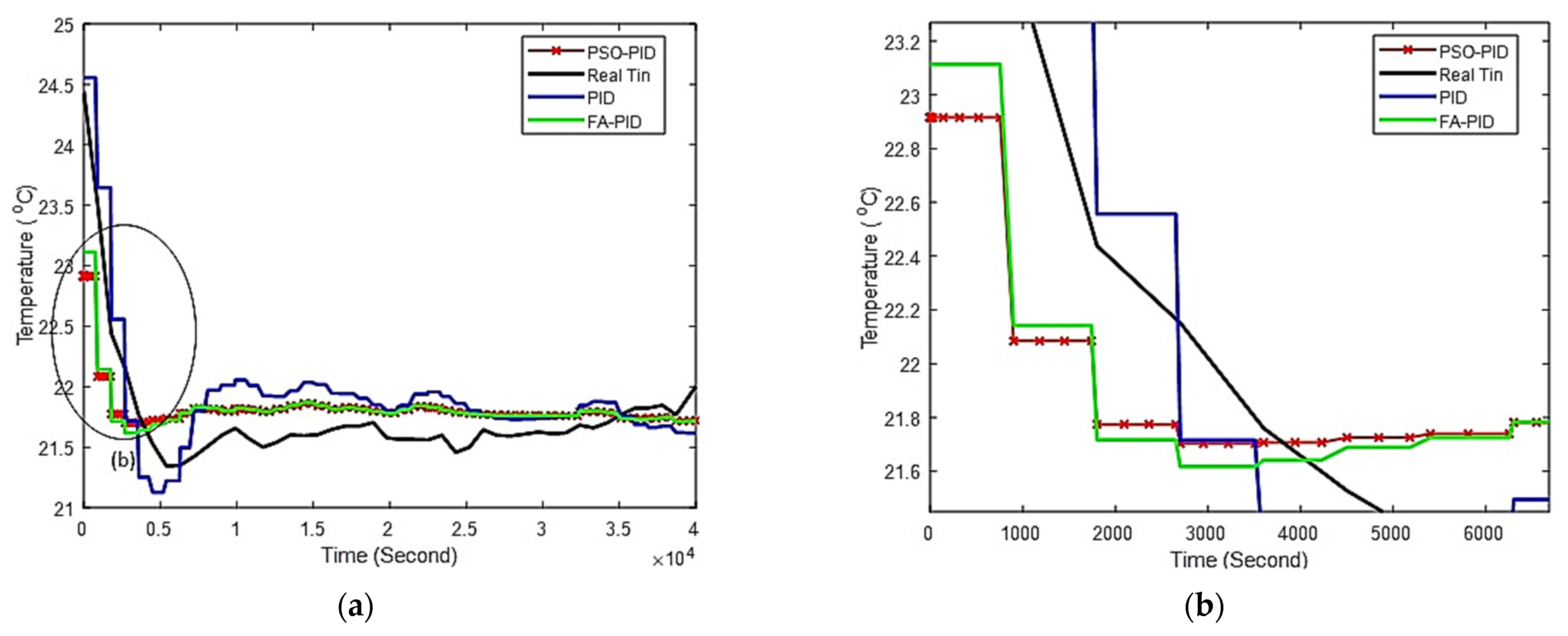
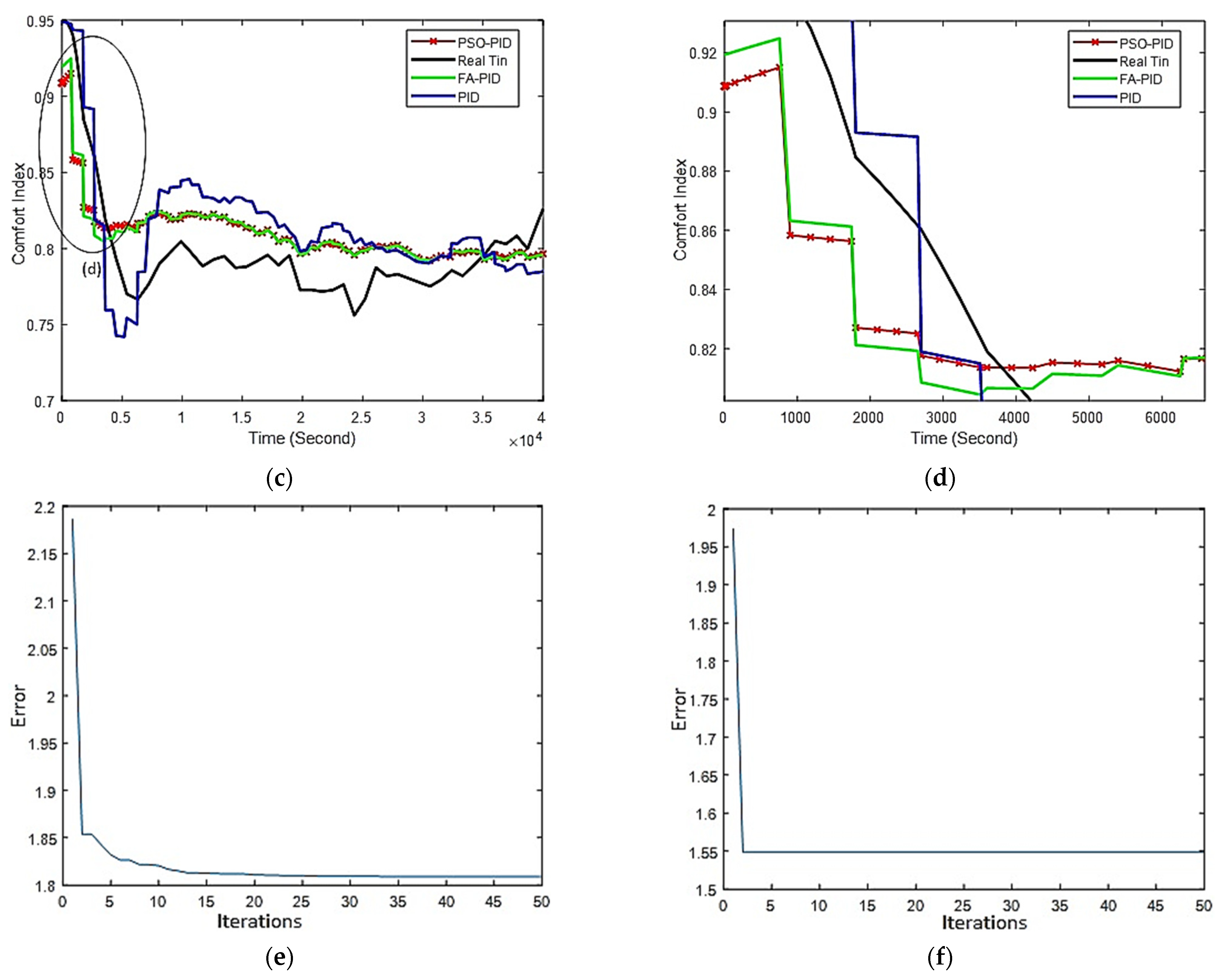
4.1. Result Analysis
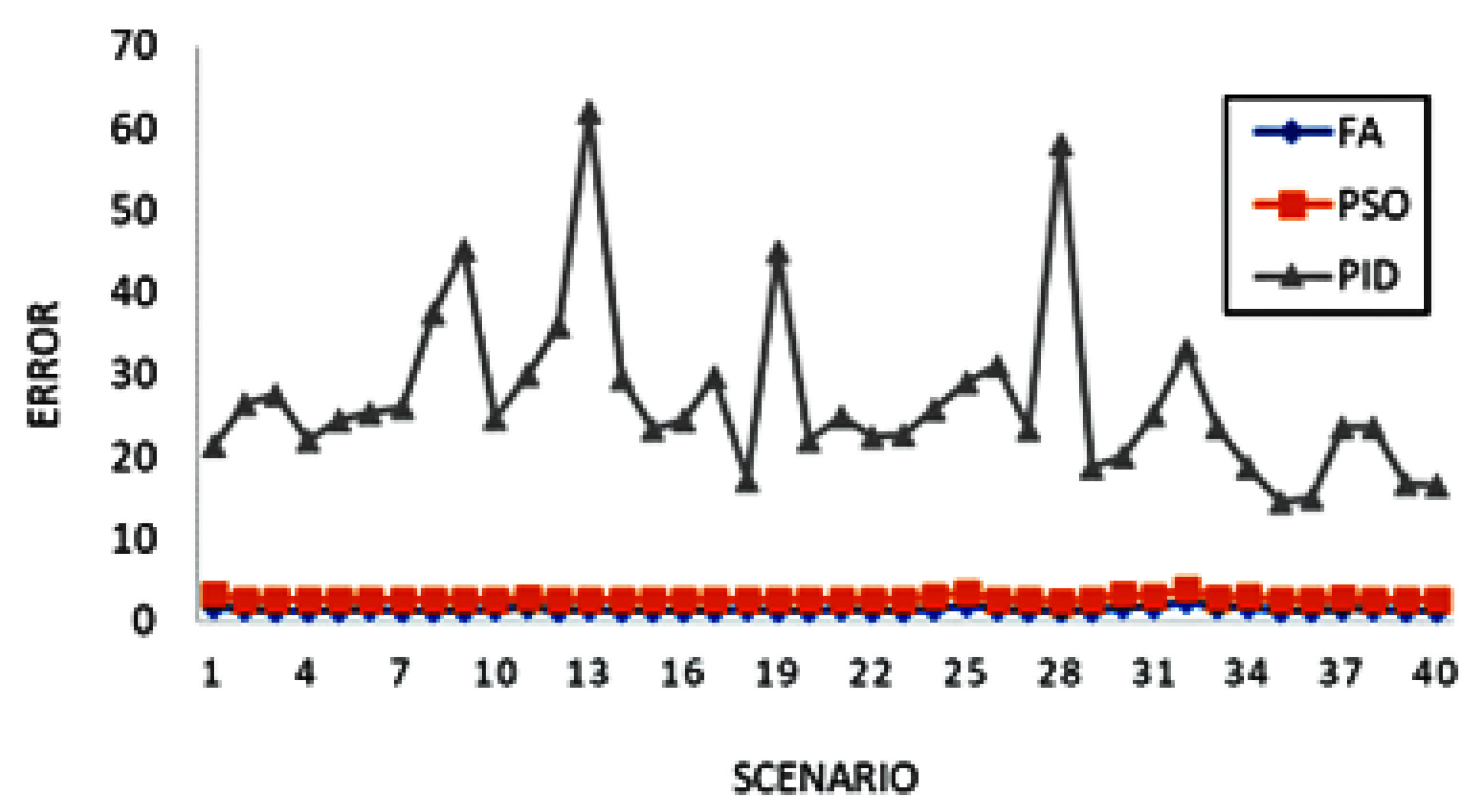
4.2. ITSE Value Comparison between PID, FA-PID, and PSO-PID
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature and Abbreviations
| Nomenclature | |
| M | Metabolic energy production, W/m2 |
| W | Rate of mechanical work, W/m2 |
| Ta | Ambient air temperature, °C |
| Tr | Mean radiant temperature, °C |
| Qdiff | Heat loss via diffusion, W |
| Qevap | Heat loss via evaporation, W |
| Qresp | Heat loss vis respiration, W |
| fcl | Clothing surface area factor |
| T | Temperature, °C |
| var | Relative air velocity, m/s |
| lcl | Basic clothing insulation, clo |
| rh | Relative humidity, % |
| Pa | Water vapour partial pressure, (Pa) |
| hc | Convective heat transfer coefficient, W/(m2·K) |
| Abbreviations | |
| ACMV | Air-Conditioning and Mechanical Ventilation |
| AHU | Air Handling Unit |
| ARX | Autoregressive Exogenous |
| ARIMA | Autoregressive Integrated Moving Average |
| ARMAX | Autoregressive Moving Average Exogenous |
| ASHRAE | American Society of Heating, Refrigeration, and Air Conditioning Engineers |
| BAS | Building Automation System |
| CDWP | Condenser Water Pump |
| CHWP | Chilled Water Pump |
| FA | Firefly Algorithm |
| FA-PID | PID controller optimized by Firefly Algorithm |
| FCU | Fan Coil Unit |
| GA | Genetic Algorithm |
| GBI | Green Building Index |
| HVAC | Heating, Ventilation, and Air-Conditioning |
| IGV | Intake Guide Vanes |
| ITSE | Integral of Time Multiply Squared Error |
| MET | Malaysian Meteorology Department |
| MITI | Ministry of International Trade and Industry |
| NL-ARX | Nonlinear Autoregressive with Exogenous |
| NNARX | Neural Network-Based Nonlinear Autoregressive |
| PID | Proportional, Integral and Derivative |
| PMV | Predicted Mean Vote |
| PPD | Percentage of Dissatisfied |
| PSO | Particle Swarm Optimization |
| PSO-PID | PID controller optimized by Particle Swarm Optimization |
| SCHWP | Secondary Chilled Water Pump |
| Command Temperature | |
| Tin | Indoor Temperature |
| Tout | Outdoor Temperature |
| Setting temperature | |
| ΔT | Temperature Difference |
| v | Relative Airflow Velocity |
| VAV | Variable Air Valve/Volume |
| VSD | Variable Speed Drive |
| W | Rate of Mechanical Work |
References
- Saber, E.; Tham, K.; Leibundgut, H. A Review of High Temperature Cooling Systems in Tropical Buildings. Build. Environ. 2016, 96, 237–249. [Google Scholar] [CrossRef]
- Jayamaha, L. Energy-Efficient Building Systems; McGraw-Hill: New York, NY, USA, 2006. [Google Scholar]
- Ho, J.; Jindal, G.; Low, M. Singapore’s Intended Nationally Determined Contribution for Cop21 Climate Conference in Paris; Energy Studies Institute: Singapore, 2015. [Google Scholar]
- Hassana, S.; Zinb, M.; Majid, A.; Balubaida, S.; Hainina, R. Building Energy Consumption in Malaysia: An Overview. J. Teknol. 2014, 7, 33–38. [Google Scholar] [CrossRef]
- National Environment Agency. Stricter Energy Performance Standards for Air Conditioners; NEA: Singapore, 2016. [Google Scholar]
- Katili, A.R.; Boukhanouf, R.; Wilson, R. Space Cooling in Buildings in Hot and Humid Climates—A Review of the Effect of Humidity on the Applicability of Existing Cooling Techniques. In Proceedings of the 14th International Conference on Sustainable Energy Technologies—SET, Nottingham, UK, 25–27 August 2015. [Google Scholar]
- Shaikh, P.H.; Nor, N.B.M.; Sahito, A.A.; Nallagownden, P.; Elamvazuthi, I.; Shaikh, M.S. Building Energy for Sustainable Development in Malaysia: A Review. Renew. Sustain. Energy Rev. 2017, 75, 1392–1403. [Google Scholar] [CrossRef]
- Saidur, R. Energy Consumption, Energy Savings, And Emission Analysis in Malaysian Office Buildings. Energy Policy 2009, 37, 4104–4113. [Google Scholar] [CrossRef]
- Roonak, D. Assessing the Thermal Comfort and Ventilation in Malaysia and The Surrounding Regions. Renew. Sustain. Energy Rev. 2015, 48, 681–691. [Google Scholar]
- Bouw, M.D.; Dubois, S.; Dekeyser, L.; Vanhellemont, Y. Energy Efficiency and Comfort of Historic Buildings; Flanders Heritage Agency: Brussels, Belgium, 2016. [Google Scholar]
- Jylhä, K.; Jokisalo, J.; Ruosteenoja, K.; Pilli-Sihvola, K.; Kalamees, T.; Seitola, T.; Mäkelä, H.M.; Hyvönen, R.; Laapas, M.; Drebs, A. Energy Demand for The Heating and Cooling of Residential Houses in Finland in a Changing Climate. Energy Build. 2015, 99, 104–116. [Google Scholar] [CrossRef]
- Bob, M.; Noam, S.; Eerang, P.; Alon, K. The [Limited] Impact of Weather on Tourist Behavior in an Urban Destination. J. Travel Res. 2015, 54, 442–455. [Google Scholar]
- Ebrahimi, H.; Barakat, S.; Moradi, B.; Dehghan, H.; Sheykhdarani, S. Assessment of Thermal Comfort within Dormitory of Isfahan University. Int. J. Occup. Hyg. 2019, 12, 1–9. [Google Scholar]
- McQuiston, F.C.; Parker, J.D.; Spitler, J.D. Heating, Ventilating and Air-Conditioning Analysis and Design; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
- Mechaqrane, A.; Zouak, M. A Comparison of Linear and Neural Network ARX Models Applied to a Prediction of the Indoor Temperature of a Building. Neural Comput. Appl. 2004, 13, 32–37. [Google Scholar]
- Amaran, S.; Sahinidis, N.V.; Sharda, B.; Bury, S.J. Simulation Optimization: A Review of Algorithms and Applications. Ann. Oper. Res. 2016, 240, 351–380. [Google Scholar] [CrossRef]
- Akyol, S.; Alatas, B. Plant Intelligence-Based Metaheuristic Optimization Algorithms. Artif. Intell. Rev. 2017, 47, 417–462. [Google Scholar] [CrossRef]
- Alatas, H.; Bingöl, H. Comparative Assessment of Light-Based Intelligent Search and Optimization Algorithms. Light Eng. 2020, 28, 51–59. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.-S.; He, X. Firefly Algorithm: Recent Advances and Applications. Int. J. Swarm Intell. 2013, 1, 1–14. [Google Scholar] [CrossRef]
- Hu, X.; Eberhart, R. Adaptive Particle Swarm Optimization: Detection and Response to Dynamic Systems. In Proceedings of the 2002 Congress on Evolutionary Computation, Honolulu, HI, USA, 12–17 May 2002. [Google Scholar]
- Shaikh, P.H.; Nor, N.B.M.; Nallagownden, P.; Elamvazuthi, I. Intelligent Multi-Objective Optimization for Building Energy and Comfort Management. J. King Saud Univ. Eng. Sci. 2018, 30, 195–204. [Google Scholar] [CrossRef]
- Zhai, D.; Chaudhuri, T.; Soh, Y.C. Modeling and Optimization of Different Sparse Augmented Firefly Algorithms for ACMV Systems Under Two Case Studies. Build. Environ. 2017, 125, 129–142. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, R.; Wang, L. Intelligent Multi-Agent Control for Integrated Building and Micro-Grid Systems. In Proceedings of the Innovative Smart Grid Technologies (ISGT) 2011, Anaheim, CA, USA, 17–19 January 2011; pp. 1–7. [Google Scholar]
- Wang, L.; Wang, Z.; Yang, R. Intelligent Multiagent Control System for Energy and Comfort Management in Smart and Sustainable Buildings. IEEE Trans. Smart Grid 2012, 3, 605–617. [Google Scholar] [CrossRef]
- Yang, R.; Wang, L. Development of Multi-Agent System for Building Energy and Comfort Management Based on Occupant Behaviors. Energy Build. 2013, 56, 1–7. [Google Scholar] [CrossRef]
- Yang, R.; Wang, L. Control strategy optimization for energy efficiency and comfort management in HVAC systems. In Proceedings of the 2015 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 18–20 February 2015; pp. 1–5. [Google Scholar]
- Ali, S.; Kim, D. Energy Conservation and Comfort Management in Building Environment. Int. J. Innov. Comput. Inf. Control 2013, 9, 2229–2244. [Google Scholar]
- Griego, D.; Krarti, M.; Hernández-Guerrero, A. Optimization of Energy Efficiency and Thermal Comfort Measures for Residential Buildings in Salamanca, Mexico. Energy Build. 2012, 54, 540–549. [Google Scholar] [CrossRef]
- Huang, H.; Kato, S.; Hu, R. Optimum Design for Indoor Humidity by Coupling Genetic Algorithm with Transient Simulation Based on Contribution Ratio of Indoor Humidity and Climate Analysis. Energy Build. 2012, 47, 208–216. [Google Scholar] [CrossRef]
- Lee, K.-P.; Cheng, T.-A. A Simulation–Optimization Approach for Energy Efficiency of Chilled Water System. Energy Build. 2012, 54, 290–296. [Google Scholar] [CrossRef]
- Li, B.; Gangadhar, S.; Cheng, S.; Verma, P.K. Predicting User Comfort Level Using Machine Learning for Smart Grid Environments. In Proceedings of the Innovative Smart Grid Technologies (ISGT) 2011, Anaheim, CA, USA, 17–19 January 2011; pp. 1–6. [Google Scholar]
- Abras, S.; Ploix, S.; Pesty, S.; Jacomino, M. A Multi-Agent Home Automation System for Power Management. In Informatics in Control Automation and Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 59–68. [Google Scholar]
- Singhvi, V.; Krause, A.; Guestrin, C.; Garrett, J.H.; Matthews, H.S. Intelligent Light Control Using Sensor Networks. In Proceedings of the Third International Conference on Embedded Networked Sensor Systems, San Diego, CA, USA, 2–4 November 2005; pp. 218–229. [Google Scholar]
- Guillemin, A.; Morel, N. An Innovative Lighting Controller Integrated in A Self- Adaptive Building Control System. Energy Build. 2001, 33, 477–487. [Google Scholar] [CrossRef]
- ISO 7730:2005; Ergonomics of the Thermal Environment. ISO: Geneva, Switzerland, 2005.
- Auliciems, A.; Szokolay, S.V. Thermal Comfort; Department of Architecture, The University of Queensland: Brisbane, Australia, 2007. [Google Scholar]
- Satoru, T.; Sho, M.; Takayuki, M. Prediction of Whole-body Thermal Sensation in the Non-steady State Based on Skin Temperature. Build. Environ. 2013, 68, 123–133. [Google Scholar]
- Ricardo, F.; Natalia, G.; Roberto, L. A Review of Human Thermal Comfort in the Built Environment. Energy Build. 2015, 105, 178–205. [Google Scholar]
- Montgomery, R.; McDowall, R. Fundamentals of HVAC Control Systems; American Society of Heating, Refrigerating and Air-Conditioning Engineers, Inc.: Peachtree Corners, GA, USA, 2007. [Google Scholar]
- Deara, R.; Gail, B. Thermal Comfort in Naturally Ventilated Buildings: Revisions to ASHRAE Standard 55. Energy Build. 2002, 34, 549–561. [Google Scholar] [CrossRef]
- Fanger, P.O. Thermal Comfort: Analysis and Applications in Environmental Engineering; Danish Technical Press: København, Denmark, 1970. [Google Scholar]
- Streinu-Cercel, A.; Costoiu, S.; Mârza, M.; Streinu-Cercel, A.; Mârza, M. Models for the Indices of Thermal Comfort. J. Med. Life 2008, 1, 148–156. [Google Scholar]
- Tai, K.J.; Hyun, L.J.; Ho, C.S.; Young, Y.G. Development of the Adaptive PMV Model for Improving Prediction Performances. Energy Build. 2015, 98, 100–105. [Google Scholar]
- The Engineering ToolBox. Met—Metabolic Rate. 2004. Available online: https://www.engineeringtoolbox.com/met-metabolic-rate-d_733.html (accessed on 7 November 2019).
- The Engineering ToolBox. Clothing and Thermal Insulation. 2004. Available online: https://www.engineeringtoolbox.com/clo-clothing-thermal-insulation-d_732.html (accessed on 7 November 2019).
- Kreider, J.F.; Curtiss, P.S.; Rabl, A. Heating and Cooling of Buildings; McGraw Hill Inc.: New York, NY, USA, 2002. [Google Scholar]
- Building Automation System. Air Handling Unit Level 31; MITI Building: Kuala Lumpur, Malaysia, 2015. [Google Scholar]
- Okochi, G.S.; Yao, Y. A Review of Recent Developments and Technological Advancements of Variable-Air-Volume (VAV) Air-Conditioning Systems. Renew. Sustain. Energy Rev. 2016, 59, 784–817. [Google Scholar] [CrossRef]
- Coelho, L.D.S.; Askarzadeh, A. An Enhanced Bat Algorithm Approach for Reducing Electrical Power Consumption of Air Conditioning Systems Based on Differential Operator. Appl. Therm. Eng. 2016, 99, 834–840. [Google Scholar] [CrossRef]
- Ruano, A.E.; Crispim, E.M.; Conceição, E.Z.E.; Lúcio, M.M.J.R. Prediction of Building’s Temperature Using Neural Networks Models. Energy Build. 2006, 38, 682–694. [Google Scholar] [CrossRef]
- Underwood, C.P. HVAC Control Systems: Modelling, Analysis and Design; Routledge: London, UK, 2002. [Google Scholar]
- Jimenez, M.J.; Madsen, H. Models for Describing the Thermal Characteristics of Building Components. Build. Environ. 2008, 43, 152–162. [Google Scholar] [CrossRef]
- The MathWorks. Nonlinear ARX Models. Available online: https://www.mathworks.com/help/ident/ug/what-are-nonlinear-arx-models.html (accessed on 7 November 2019).
- Ogata, K. Modern Control Engineering; Prentice Hall: Hoboken, NJ, USA, 2010. [Google Scholar]
- Acosta, A.; Gonzalez, A.; Zamarreno, J.; Alvarez, V. Energy Savings and Guaranteed Thermal Comfort in Hotel Rooms Through Nonlinear Model Predictive Controllers. Energy Build. 2016, 129, 59–68. [Google Scholar] [CrossRef]
- Kim, J.; Hong, T.; Jeong, J.; Koo, C.; Jeong, K. An Optimization Model for Selecting the Optimal Green Systems by Considering the Thermal Comfort and Energy Consumption. Appl. Energy 2016, 169, 682–695. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Yang, X.-S.; Talatahari, S.; Alavi, A.H. Firefly Algorithm with Chaos. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 89–98. [Google Scholar] [CrossRef]
- Engelbrecht, A.P. Fundamentals of Computational Swarm Intelligence, 1st ed.; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- ASHRAE Standard 55-2020; American Society of Heating, Refrigerating and Air-Conditioning Engineers. ASHRAE: Peachtree Corners, GA, USA, 2020; Thermal Environmental Conditions for Human Occupancy. Available online: https://www.ashrae.org/standards-research--technology/standards--guidelines (accessed on 15 July 2023).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimization Technique | Author | Basic Principle |
|---|---|---|
| FA | D. Zhai et al., 2017 [22] | The optimization of ACMV system for thermal comfort using the FA. |
| MOPSO | Rui Yang et al., 2011, 2012, 2013, 2015 [23,24,25,26] | Adjusting the temperature, lighting, and air quality to the building occupier proposed levels to reduce energy consumption. |
| MIGA | Safdar et al., 2013 [27] | Optimizing energy use based on the comfort index. |
| GA | Griego et al., 2012 [28] | Using data from occupant comfort as a guide to manage energy and heat. |
| GA | Huang et al., 2012 [29] | Ratios of energy, heat, and humidity for optimization. |
| PSO & Hooke–Jeeves | Lee et al., 2012 [30] | Optimization to reconcile the tension between comfort and energy |
| MOGA | Bei et al., 2011 [31] | Energy, thermal comfort, and lighting scheduled controls with discrete predictive models. |
| Bellman–Ford | Shadi et al., 2008 [32] | Techniques for scheduling to maximize energy and thermal comfort. |
| GA-ANN | Singhvi et al., 2005 [33] Guillemin et al., 2001 [34] | Optimizing energy use to provide thermal comfort |
| Abbreviation | Phrase |
|---|---|
| AHU | |
| Constant | Value |
|---|---|
| Parameter | Value |
|---|---|
| Number of particles | 20 |
| Number of iterations | 50 |
| 0.4 | |
| 0.9 | |
| 2 | |
| 2 |
| Controller | Kp | Ki | Kd | ITSE | |
|---|---|---|---|---|---|
| FA-PID | −18.5909 | −0.008 | 2000 | 1.741 | |
| PSO-PID | −20 | 1.549 | |||
| FA-PID | −15.679 | 1.809 | |||
| PSO-PID | −20 | 1.549 | |||
| FA-PID | −18.004 | 1.707 | |||
| PSO-PID | −20 | 1.598 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aziz, M.; Kadir, K.; Azman, H.K.; Vijyakumar, K. Optimization of Air Handler Controllers for Comfort Level in Smart Buildings Using Nature Inspired Algorithm. Energies 2023, 16, 8064. https://doi.org/10.3390/en16248064
Aziz M, Kadir K, Azman HK, Vijyakumar K. Optimization of Air Handler Controllers for Comfort Level in Smart Buildings Using Nature Inspired Algorithm. Energies. 2023; 16(24):8064. https://doi.org/10.3390/en16248064
Chicago/Turabian StyleAziz, Miqdad, Kushsairy Kadir, Haziq Kamarul Azman, and Kanendra Vijyakumar. 2023. "Optimization of Air Handler Controllers for Comfort Level in Smart Buildings Using Nature Inspired Algorithm" Energies 16, no. 24: 8064. https://doi.org/10.3390/en16248064