
A New Vehicle-Specific Power Model for the Estimation of Hybrid Vehicle Emissions


Abstract
:1. Introduction
2. Materials and Methods
2.1. Measurement and Equipment
2.2. VSP Model
3. Results and Discussion
3.1. Vehicle Models
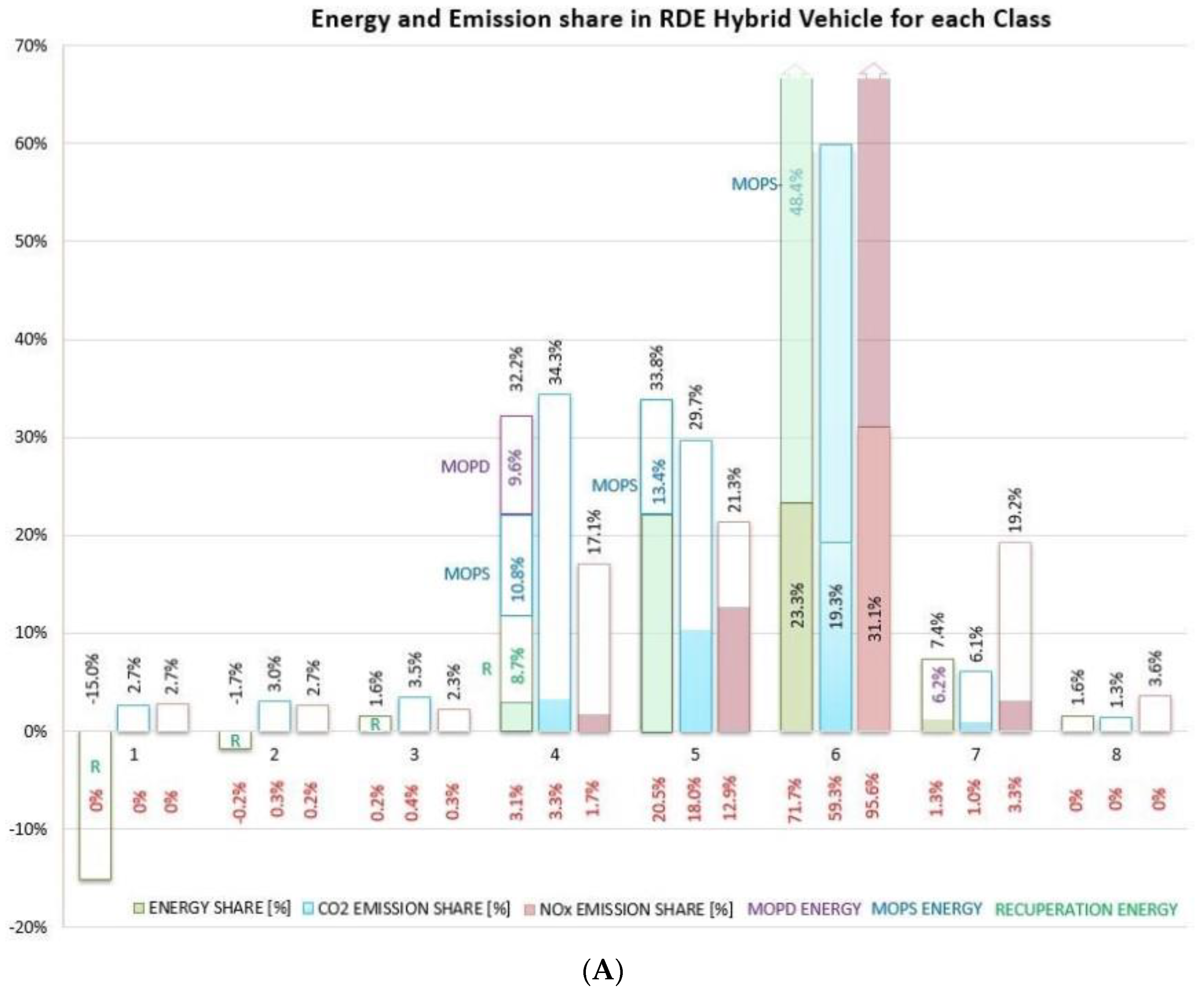
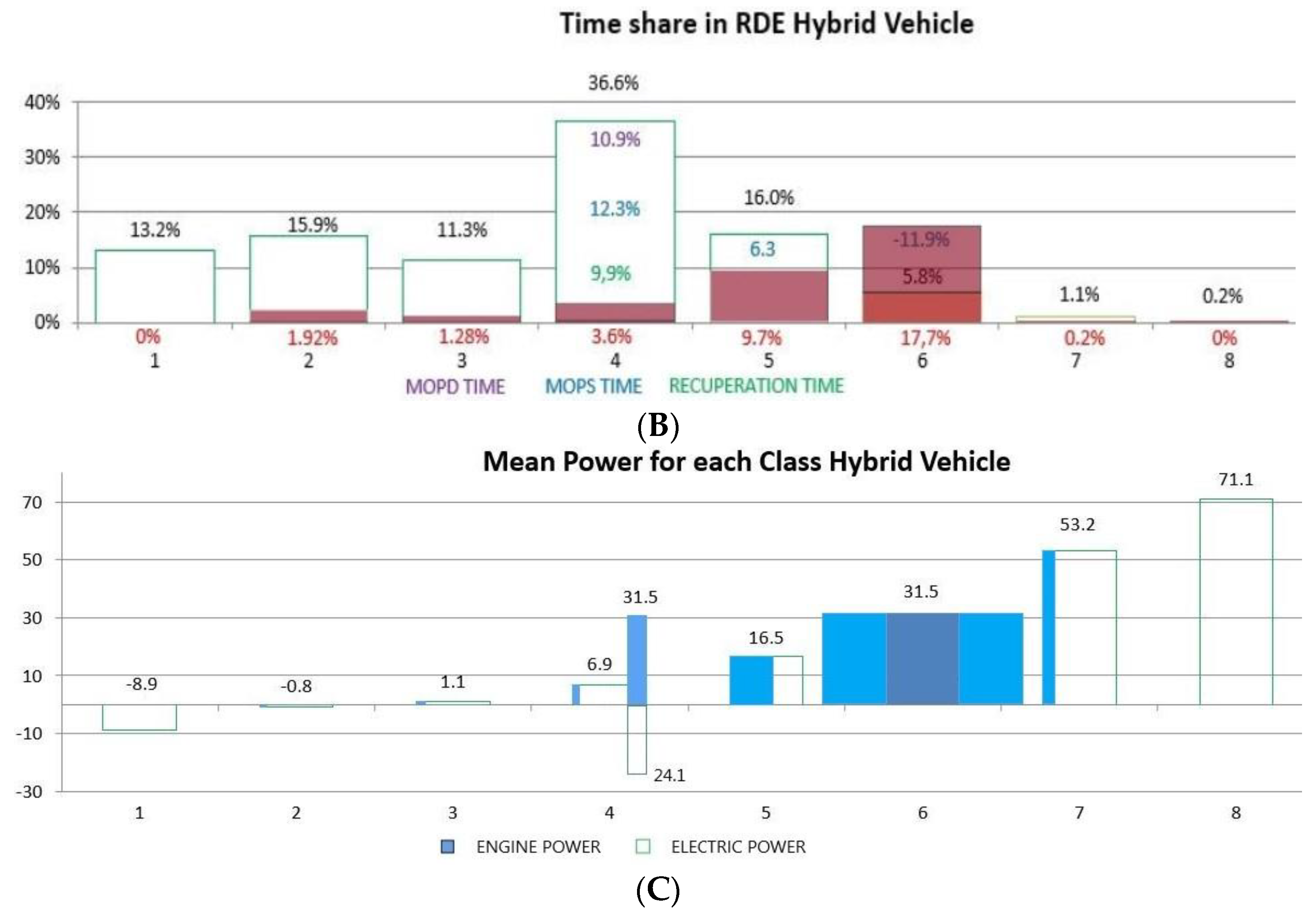
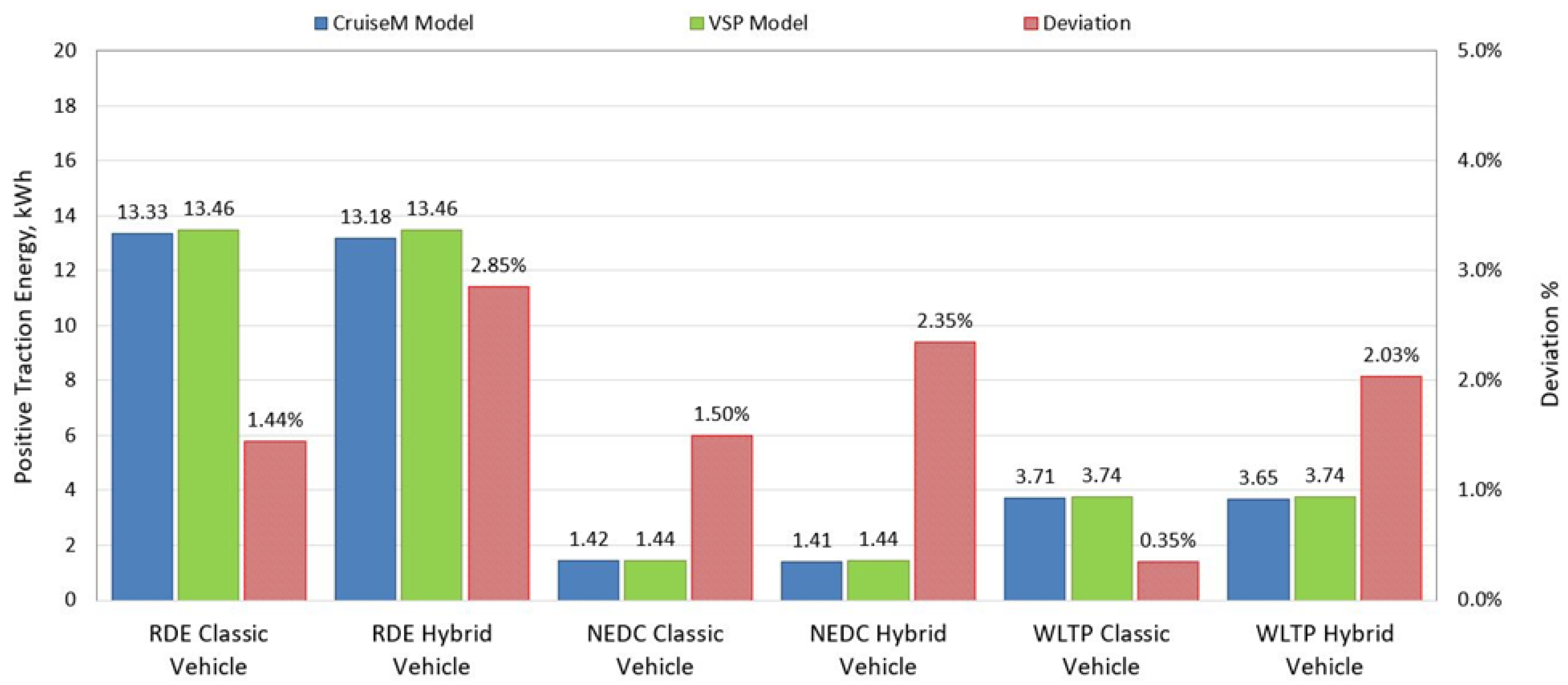
3.2. Testing of Hybrid and VSP Vehicle Models in RDE, NEDC and WLTC Driving Cycles
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DOC | Diesel oxidation catalyst |
| DPF | Diesel particulate filter |
| EGR | Exhaust gas recirculation |
| EM | Electric machine |
| EMS | Energy management strategy |
| EV | Electric vehicle |
| GPS | Global position system |
| HEV | Hybrid electric vehicle |
| ICE | Internal combustion engine |
| KE | Kinetic energy |
| LPG | Liquid petroleum gas |
| NEDC | New European driving cycle |
| OBD | On-board diagnostics |
| PE | Potential energy |
| PEMS | Portable emission measurement system |
| RDE | Real driving emission |
| TM | Technical mass |
| VSP | Vehicle specific power |
| WLTP | Worldwide harmonized light vehicle test procedure |
| f0, f1, f2 | Coast down analyses free factor, linear factor, quadratic factor |
| Etr | Traction energy |
| Faero | Aerodynamics resistance force |
| Froll | Rolling resistance force |
| Fres | Resistance force |
| h | Height |
| m | Mass |
| Mx | Total mass of x emission |
| mx,j | Mass of x emission in j power class |
| mx,k | Mass of x emission in k interval |
| Pc,j | Power j-class |
| Pe,j | Engine power j-class |
| Pwheel | Wheel power |
| Tj,mwa | j class engine ICE operating time |
| v | Velocity |
| Wbr | Braking energy |
| wmwa,j | Mechanical energy due to the shift of the ICE operating region |
| Ws,mwa | Total stored energy due to the shift of the ICE operating region |
| Wtr,j | Traction energy from ICE in class j |
| wtr,j | Drive shaft traction energy in class j |
| α | Regenerative braking factor |
| γj | Stored energy share in class j |
| ηg, ηst, ηm | Generator, storage, motor efficiency |
| ηgb, ηf | Gearbox, final drive efficiency |
References
- News European Parliament. EU Ban on the Sale of New Petrol and Diesel Cars from 2035 Explained. Available online: https://www.europarl.europa.eu/news/en/headlines/economy/20221019STO44572/eu-ban-on-sale-of-new-petrol-and-diesel-cars-from-2035-explained (accessed on 26 August 2023).
- Regulation (EU) 2023/851 of the European Parliament and of the Council of 19 April 2023. Available online: https://eur-lex.europa.eu/eli/reg/2023/851 (accessed on 5 December 2023).
- Mali, B.; Shrestha, A.; Chapagain, A.; Bishwokarma, R.; Kumar, P.; Gonzalez-Longatt, F. Challenges in the penetration of electric vehicles in developing countries with a focus on Nepal. Renew. Energy Focus 2022, 40, 1–12. [Google Scholar] [CrossRef]
- Ktistakis, M.A.; Pavlovic, J.; Fontaras, G. Sampling Approaches for Road Vehicle Fuel Consumption Monitoring; EUR 30420 EN; Publications Office of the European Union: Luxembourg, 2021; ISBN 978-92-76-23986-4. [Google Scholar] [CrossRef]
- Regulation (EU) 2019/631 of the European Parliament and of the Council of 17 April 2019 Setting CO2 Emission Performance Standards for New Passenger Cars and for New Light Commercial Vehicles, and Repealing Regulations (EC) No 443/2009 and (EU) No 510/2011. 2019. Available online: http://data.europa.eu/eli/reg/2019/631/oj (accessed on 5 December 2023).
- Takaishi, T.; Numata, A.; Nakano, R.; Sakaguchi, K. Approach to High Efficiency Diesel and Gas Engines. Mitsubishi Heavy Ind. Rev. 2008, 45, 21–24. [Google Scholar]
- Regulation of the European Parliament and of the Council on Type-Approval of Motor Vehicles and Engines and of Systems, Components and Separate Technical Units Intended for such Vehicles, with Respect to Their Emissions and Battery Durability (Euro 7) and Repealing Regulations (EC) No 715/2007 and (EC) No 595/2009. Available online: https://ec.europa.eu/transparency/documents-register/api/files/COM(2022)586_0/090166e5f39c64d8?rendition=false (accessed on 5 December 2023).
- Annexes (1–6) to the Proposal for a Regulation of the European Parliament and the Council on Type-Approval of Motor Vehicles and Engines and of Systems, Components and Separate Technical Units Intended for Such Vehicles, with Respect to Their Emissions and Battery Durability (Euro 7) and Repealing Regulations (EC) No 715/2007 and (EC) No 595/2009. Available online: https://ec.europa.eu/transparency/documents-register/api/files/COM(2022)586_1/090166e5f39c64bb?rendition=false (accessed on 5 December 2023).
- Maurer, R.; Kossioris, T.; Sterlepper, S.; Günther, M.; Pischinger, S. Achieving Zero-Impact Emissions with a Gasoline Passenger Car. Atmosphere 2023, 14, 313. [Google Scholar] [CrossRef]
- Morgan, J.P. Driving into 2025: The Future of Electric Vehicles. Available online: https://www.jpmorgan.com/insights/global-research/autos/electric-vehicles (accessed on 25 May 2022).
- Kozina, A.; Radica, G.; Nižetić, S. Analysis of methods towards reduction of harmful pollutants from diesel engines. J. Clean. Prod. 2020, 262, 121105. [Google Scholar] [CrossRef]
- Reshma, S.; Samuel, E.R.; Unnikrishnan, A. A Review of various internal combustion engine and electric propulsion in hybrid electric vehicles. In Proceedings of the 2019 2nd International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kannur, India, 5–6 July 2019; IEEE: Piscataway, NJ, USA, 2019; Volume 1, pp. 316–321. [Google Scholar]
- Ravi, S.S.; Mazumder, J.; Sun, J.; Brace, C.; Turner, J.W. Techno-Economic assessment of synthetic E-Fuels derived from atmospheric CO2 and green hydrogen. Energy Convers. Manag. 2023, 291, 117271. [Google Scholar] [CrossRef]
- Vučetić, A.; Sraga, V.; Bućan, B.; Ormuž, K.; Šagi, G.; Ilinčić, P.; Lulić, Z. Real Driving Emission from Vehicle Fuelled by Petrol and Liquefied Petroleum Gas (LPG). Cogn. Sustain. 2022, 1, 1–8. [Google Scholar] [CrossRef]
- Medževeprytė, U.K.; Makaras, R.; Lukoševičius, V.; Kilikevičius, S. Application and Efficiency of a Series-Hybrid Drive for Agricultural Use Based on a Modified Version of the World Harmonized Transient Cycle. Energies 2023, 16, 5379. [Google Scholar] [CrossRef]
- Schulze, S.; Feyerl, G.; Pischinger, S. Advanced ECMS for hybrid electric heavy-duty trucks with predictive battery discharge and adaptive operating strategy under real driving conditions. Energies 2023, 16, 5171. [Google Scholar] [CrossRef]
- Kampker, A.; Offermanns, C.; Heimes, H.; Bi, P. Meta-analysis on the Market Development of Electrified Vehicles. ATZ Worldw. 2021, 123, 58–63. [Google Scholar] [CrossRef]
- Sabri, M.; Danapalasingam, K.A.; Rahmat, M.F. A review on hybrid electric vehicles architecture and energy management strategies. Renew. Sustain. Energy Rev. 2016, 53, 1433–1442. [Google Scholar] [CrossRef]
- Bayindir, K.Ç.; Gözüküçük, M.A.; Teke, A. A comprehensive overview of hybrid electric vehicle: Powertrain configurations, powertrain control techniques and electronic control units. Energy Convers. Manag. 2011, 52, 1305–1313. [Google Scholar] [CrossRef]
- Zhang, P.; Yan, F.; Du, C. A comprehensive analysis of energy management strategies for hybrid electric vehicles based on bibliometrics. Renew. Sustain. Energy Rev. 2015, 48, 88–104. [Google Scholar] [CrossRef]
- Salmasi, F.R. Control strategies for hybrid electric vehicles: Evolution, classification, comparison, and future trends. IEEE Trans. Veh. Technol. 2007, 56, 2393–2404. [Google Scholar] [CrossRef]
- Ali, A.M.; Söffker, D. Towards optimal power management of hybrid electric vehicles in real-time: A review on methods, challenges, and state-of-the-art solutions. Energies 2018, 11, 476. [Google Scholar] [CrossRef]
- Liu, W. Introduction to Hybrid Vehicle System Modeling and Control; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Enang, W.; Bannister, C. Modelling and control of hybrid electric vehicles (A comprehensive review). Renew. Sustain. Energy Rev. 2017, 74, 1210–1239. [Google Scholar] [CrossRef]
- Chan, C.C.; Bouscayrol, A.; Chen, K. Electric, hybrid, and fuel-cell vehicles: Architectures and modeling. IEEE Trans. Veh. Technol. 2009, 59, 589–598. [Google Scholar] [CrossRef]
- Onori, S.; Serrao, L.; Rizzoni, G. Hybrid Electric Vehicles: Energy Management Strategies; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Tran, D.-D.; Vafaeipour, M.; El Baghdadi, M.; Barrero, R.; Van Mierlo, J.; Hegazy, O. Thorough state-of-the-art analysis of electric and hybrid vehicle powertrains: Topologies and integrated energy management strategies. Renew. Sustain. Energy Rev. 2020, 119, 109596. [Google Scholar] [CrossRef]
- Sun, X.; Cao, Y.; Jin, Z.; Tian, X.; Xue, M. An adaptive ECMS based on traffic information for plug-in hybrid electric buses. IEEE Trans. Ind. Electron. 2022, 70, 9248–9259. [Google Scholar] [CrossRef]
- Sun, X.; Jin, Z.; Xue, M.; Tian, X. Adaptive ECMS with Gear Shift Control by Grey Wolf Optimization Algorithm and Neural Network for Plug-in Hybrid Electric Buses. IEEE Trans. Ind. Electron. 2023, 71, 667–677. [Google Scholar] [CrossRef]
- Ciesla, C.; Keribar, R.; Morel, T. Engine/Powertrain/Vehicle Modeling Tool Applicable to All Stages of the Design Process; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2000; ISSN 0148-7191. [Google Scholar]
- Zhou, M.; Jin, H. Development of a transient fuel consumption model. Transp. Res. Part D Transp. Environ. 2017, 51, 82–93. [Google Scholar] [CrossRef]
- Duarte, G.; Varella, R.A.; Gonçalves, G.; Farias, T. Effect of battery state of charge on fuel use and pollutant emissions of a full hybrid electric light duty vehicle. J. Power Source 2014, 246, 377–386. [Google Scholar] [CrossRef]
- Jimenez-Palacios, J.L. Understanding and Quantifying Motor Vehicle Emissions with Vehicle Specific Power and TILDAS Remote Sensing; Massachusetts Institute of Technology: Cambridge, MA, USA, 1998. [Google Scholar]
- Functional Mock-Up Interface Specification. Available online: https://fmi-standard.org (accessed on 5 December 2023).
- Commission Regulation (EU) No 459/2012 of 29 May 2012 amending Regulation (EC) No 15/2007 of the European Parliament and of the Council and Commission Regulation (EC) No 692/2008 as Regards Emissions from Light Passenger and Commercial Vehicles (Euro 6) Text with EEA Relevance. Available online: https://eur-lex.europa.eu/eli/reg/2012/459/oj (accessed on 5 December 2023).
- Preda, I.; Covaciu, D.; Ciolan, G. Coast Down Test–Theoretical and Experimental Approach; Transilvania University Press: Braşov, Romania, 2010. [Google Scholar]
- Zhang, F.; Wang, L.; Coskun, S.; Pang, H.; Cui, Y.; Xi, J. Energy management strategies for hybrid electric vehicles: Review, classification, comparison, and outlook. Energies 2020, 13, 3352. [Google Scholar] [CrossRef]
- Lee, J.; Nelson, D.J. Rotating inertia impact on propulsion and regenerative braking for electric motor driven vehicles. In Proceedings of the 2005 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 7 September 2005; IEEE: Piscataway, NJ, USA, 2005; p. 7. [Google Scholar]
- Commission Regulation (EU) 2016/427; Amending Regulation (EC) No 692/2008 as Regards Emissions from Light Passenger and Commercial Vehicles (Euro 6). 2016. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX%3A32016R0427 (accessed on 5 December 2023).
- Kozina, A.; Radica, G.; Nižetić, S. Hybrid Vehicles Emissions Assessment. In Proceedings of the 2021 6th International Conference on Smart and Sustainable Technologies (SpliTech), Bol and Split, Croatia, 8–11 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Analyzer | NO/NO2 and CO/CO2/N2O | THC/CH4 | Particle Counter |
|---|---|---|---|
| Measuring method | Non-Dispersive Ultra Violet-NDUV Non-Dispersive Infra Red-NDIR | Flame Ionization Detector-FID | Advanced diffusion charger |
| Measuring range | NO: 0–5000 ppm | THC: 0–30,000 ppmC1 | ~1500–~2.5 × 107 #/cm3 |
| NO2: 0–2500 ppm | |||
| CO: 0–5% vol. | |||
| CO2: 0–20% vol. | CH4: 0–10,000 ppmC1 | ||
| N2O: 0–2000 ppm | |||
| Zero Drift/8 h | NO/NO2: 2 ppm | ±5 ppm C1/8 h | |
| CO: 20 ppm | |||
| CO2: 0.1% vol. | |||
| N2O: 20 ppm | |||
| Accuracy | 0.3% FS |
| Power Class No. | Pc,j (kW) from | Pc,j (kW) to |
|---|---|---|
| 1 | −∞ | −2.368 |
| 2 | −2.368 | 0.000 |
| 3 | 0.000 | 2.368 |
| 4 | 2.368 | 11.840 |
| 5 | 11.840 | 23.680 |
| 6 | 23.680 | 44.992 |
| 7 | 44.992 | 66.304 |
| 8 | 66.304 | ∞ |
| Classic Vehicle | RDE Cycle | RDE (1/km) | Deviation | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Measured | CruiseM | VSP | Measured | CruiseM | VSP | CruiseM | CruiseM (%) | VSP | VSP (%) | |
| Distance (km) | 86.21 | 86.63 | 86.21 | 1.000 | 1.005 | 1.000 | 0.005 | 0.48% | 0.000 | 0.00% |
| Positive traction energy (kWh) | 13.37 | 13.33 | 13.46 | 0.155 | 0.154 | 0.156 | −0.035 | 0.22% | 0.092 | 0.69% |
| Negative traction energy (kWh) | −2.14 | −2.22 | −2.27 | −0.0248 | −0.0256 | −0.0263 | −0.080 | 3.26% | −0.130 | 6.08% |
| CO2 emission (g) | 10,540 | 10,556 | 10,540 | 122.2 | 121.9 | 122.2 | 16.259 | −0.33% | 0.000 | 0.00% |
| NOx emission (mg) | 39,806 | 40,051 | 39,806 | 461.7 | 462.3 | 461.7 | 245.136 | 0.13% | 0.000 | 0.00% |
| Consumption (kg) | 3.366 | 3.371 | 3.366 | 0.039 | 0.039 | 0.039 | 0.005 | −0.33% | 0.000 | 0.00% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kozina, A.; Vidović, T.; Radica, G.; Vučetić, A. A New Vehicle-Specific Power Model for the Estimation of Hybrid Vehicle Emissions. Energies 2023, 16, 8094. https://doi.org/10.3390/en16248094
Kozina A, Vidović T, Radica G, Vučetić A. A New Vehicle-Specific Power Model for the Estimation of Hybrid Vehicle Emissions. Energies. 2023; 16(24):8094. https://doi.org/10.3390/en16248094
Chicago/Turabian StyleKozina, Ante, Tino Vidović, Gojmir Radica, and Ante Vučetić. 2023. "A New Vehicle-Specific Power Model for the Estimation of Hybrid Vehicle Emissions" Energies 16, no. 24: 8094. https://doi.org/10.3390/en16248094
APA StyleKozina, A., Vidović, T., Radica, G., & Vučetić, A. (2023). A New Vehicle-Specific Power Model for the Estimation of Hybrid Vehicle Emissions. Energies, 16(24), 8094. https://doi.org/10.3390/en16248094