
Active Damping Stabilization Techniques for Cascaded Systems in DC Microgrids: A Comprehensive Review



Abstract
1. Introduction
- This paper reviews the active damping compensation techniques for a cascaded system to stabilize the CPL effects in DC MGs. The merits and drawbacks of each scheme are elaborated.
- Stability analysis and stability challenges of cascaded system in DC MGs have been presented.
- The delays in digitally controlled systems and their effect on active damping control have been covered and discussed.
- This review paves the road for further investigation on active damping control strategies and their application in DC MGs.
2. Constant Power Load (CPL) Modelling
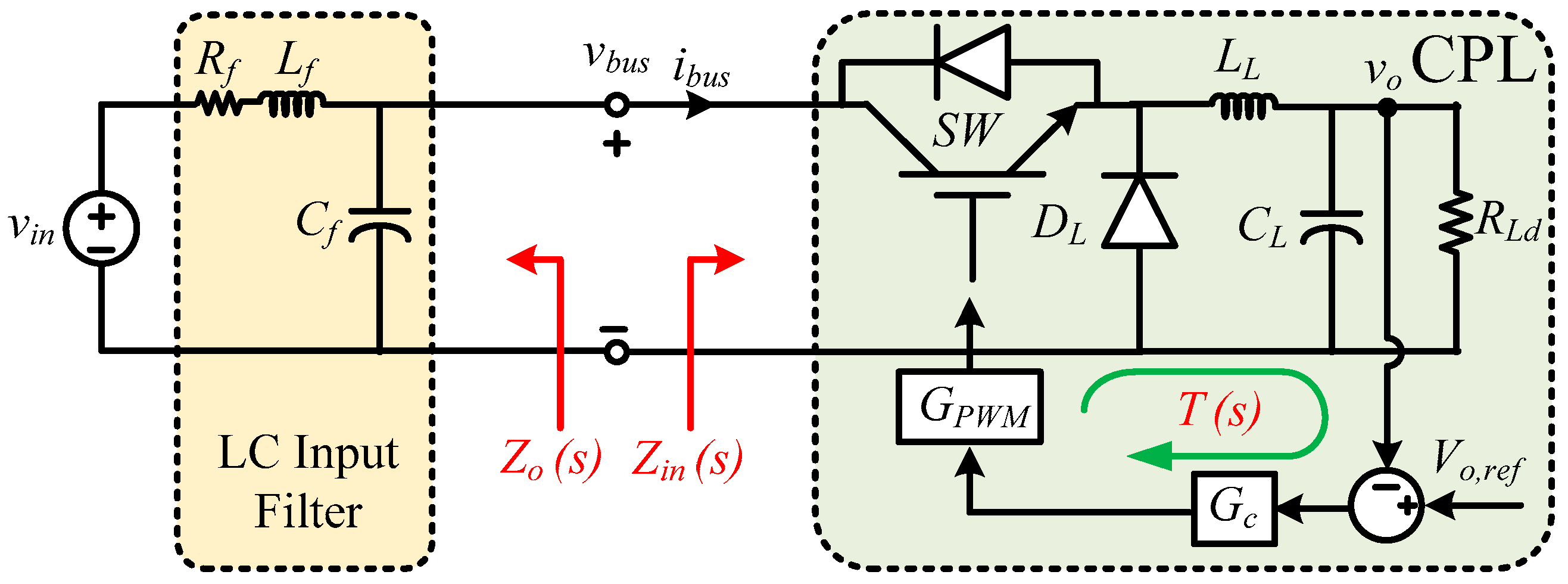
3. Performance and Stability Analysis of Cascaded DC-DC Systems
3.1. The Effect of the Load on the Source Subsystem
3.2. The Effect of the Source on the Load Converter
3.3. Impedance Interaction and Stability Analysis
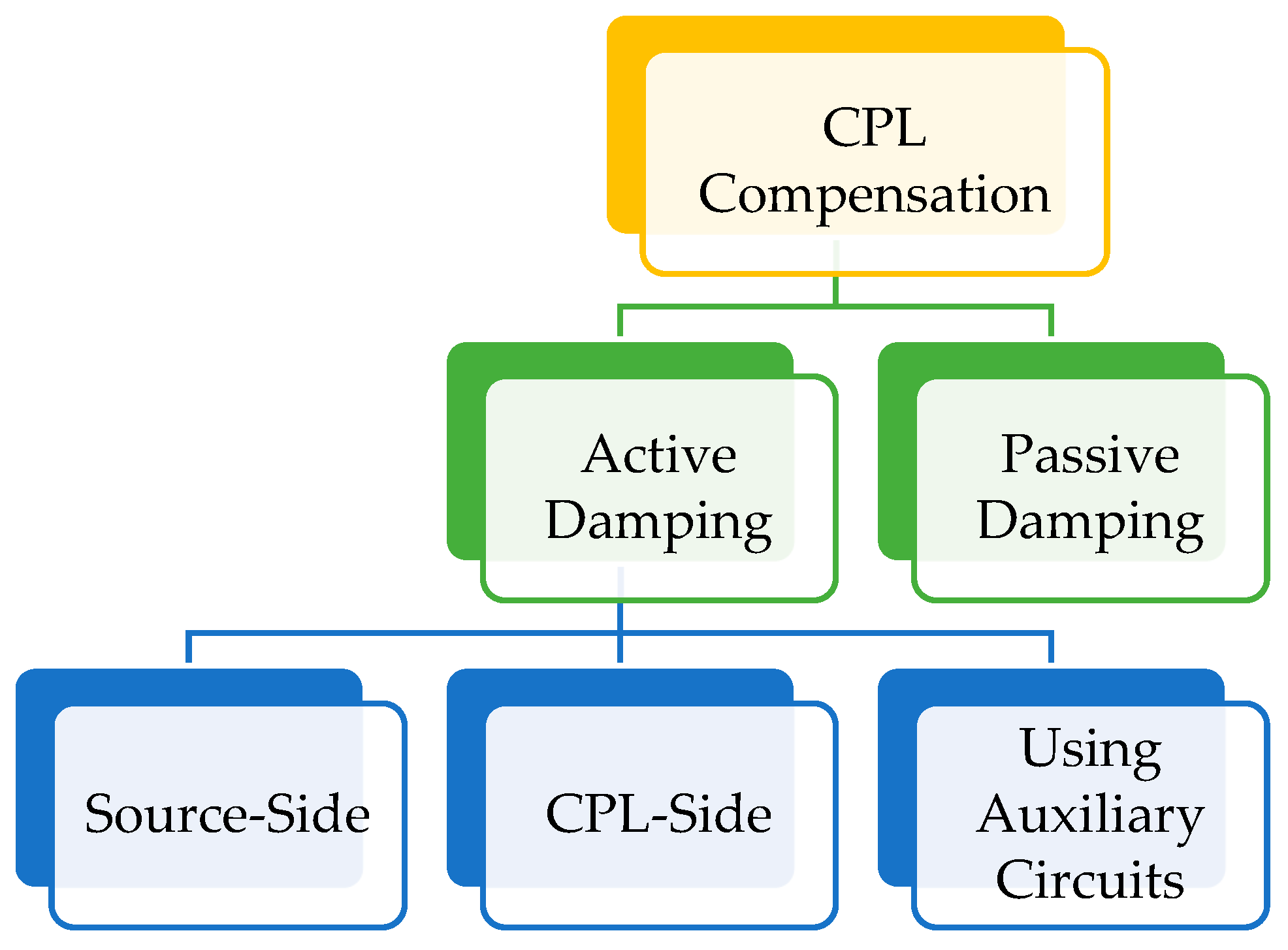
4. Classification of CPL Compensation Techniques
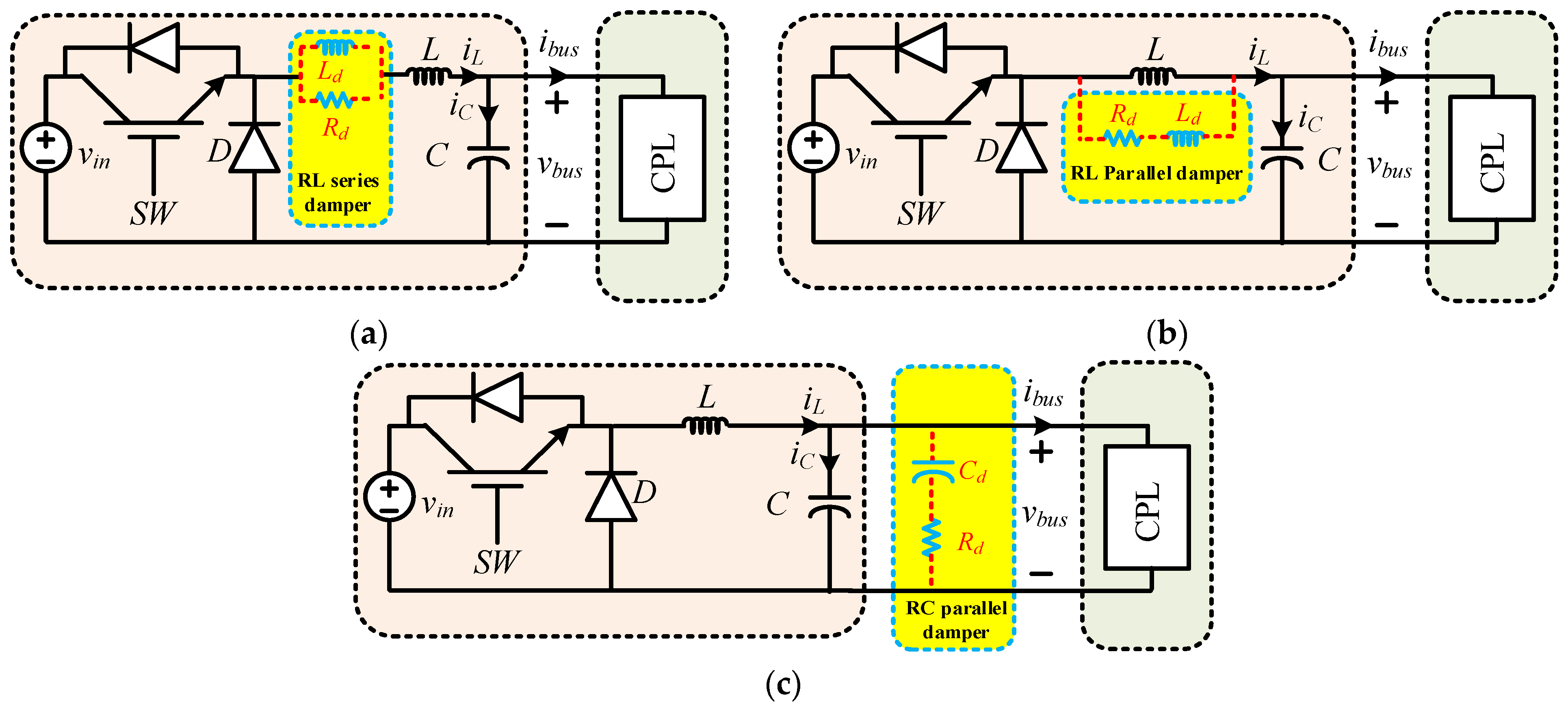
4.1. Passive Damping
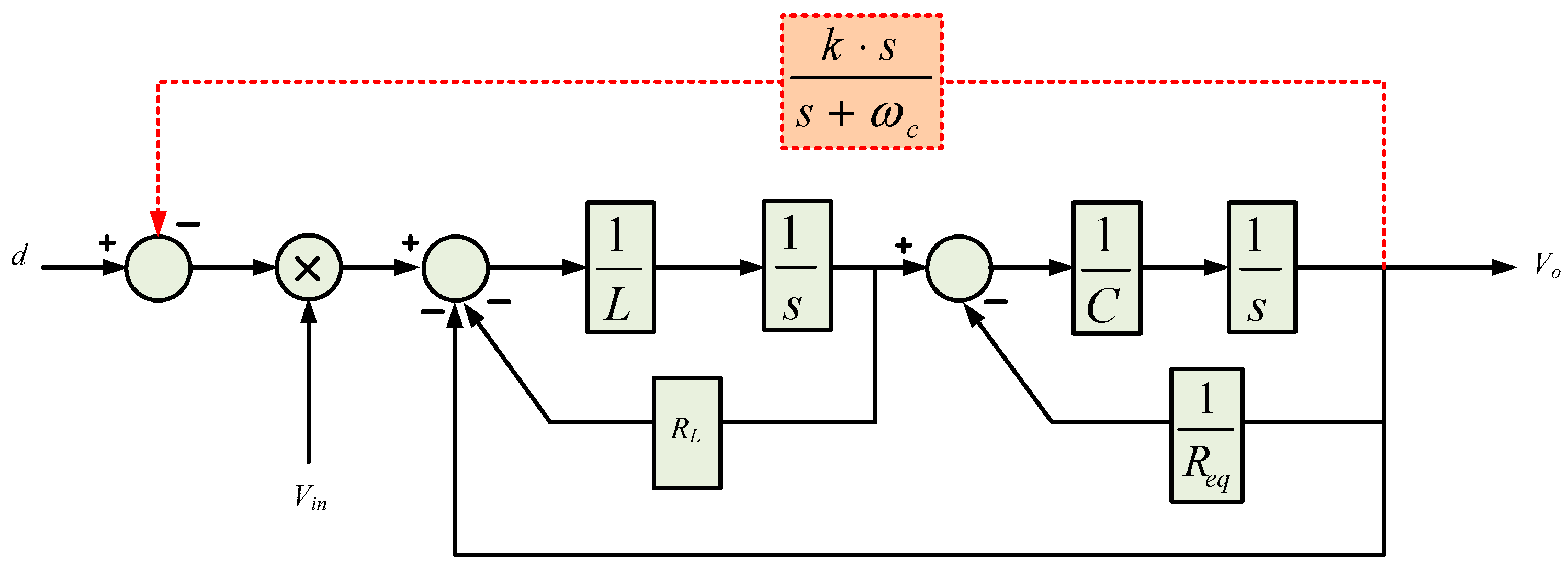
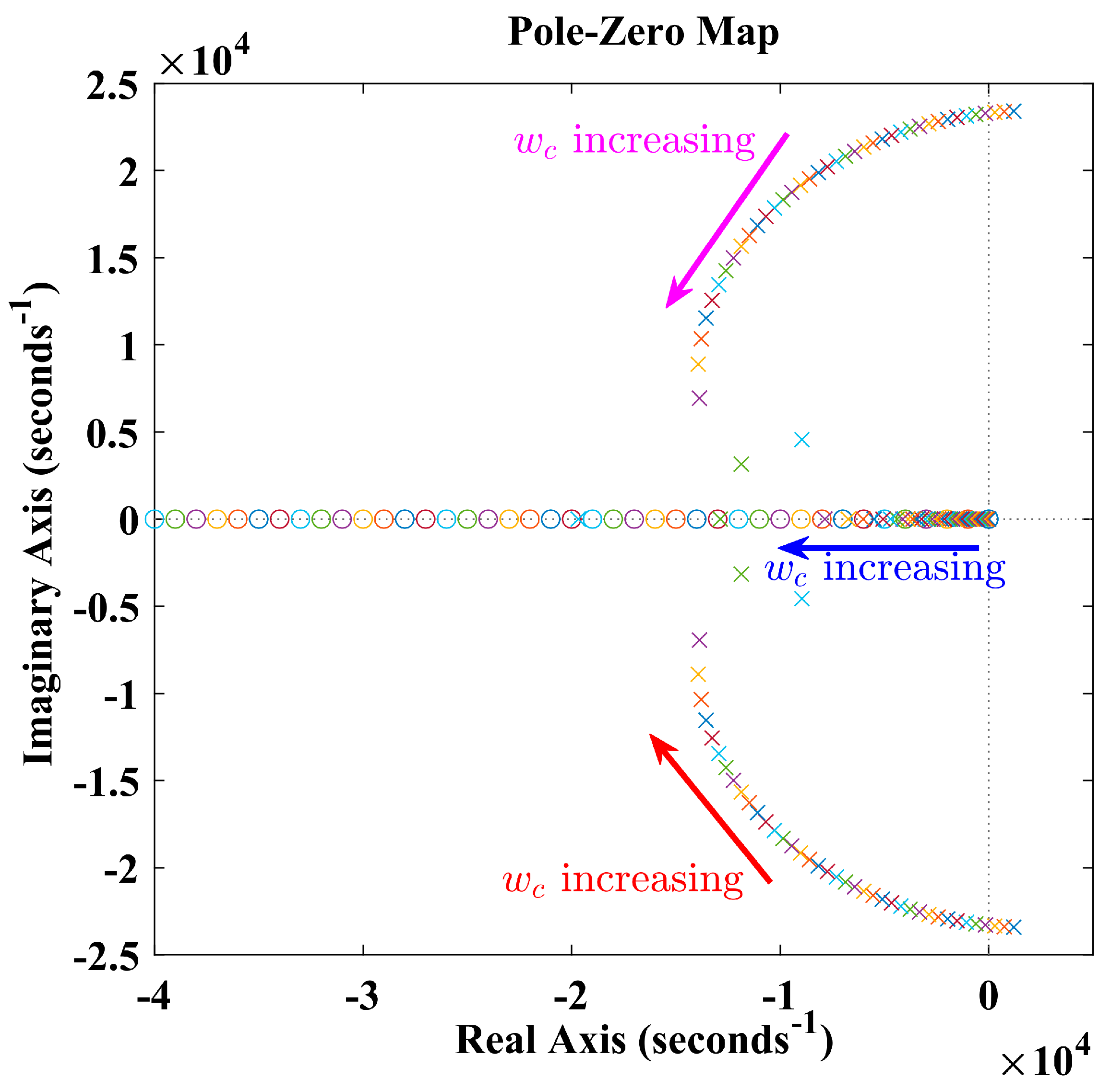
4.2. Active Damping
4.2.1. Source Side Active Damping
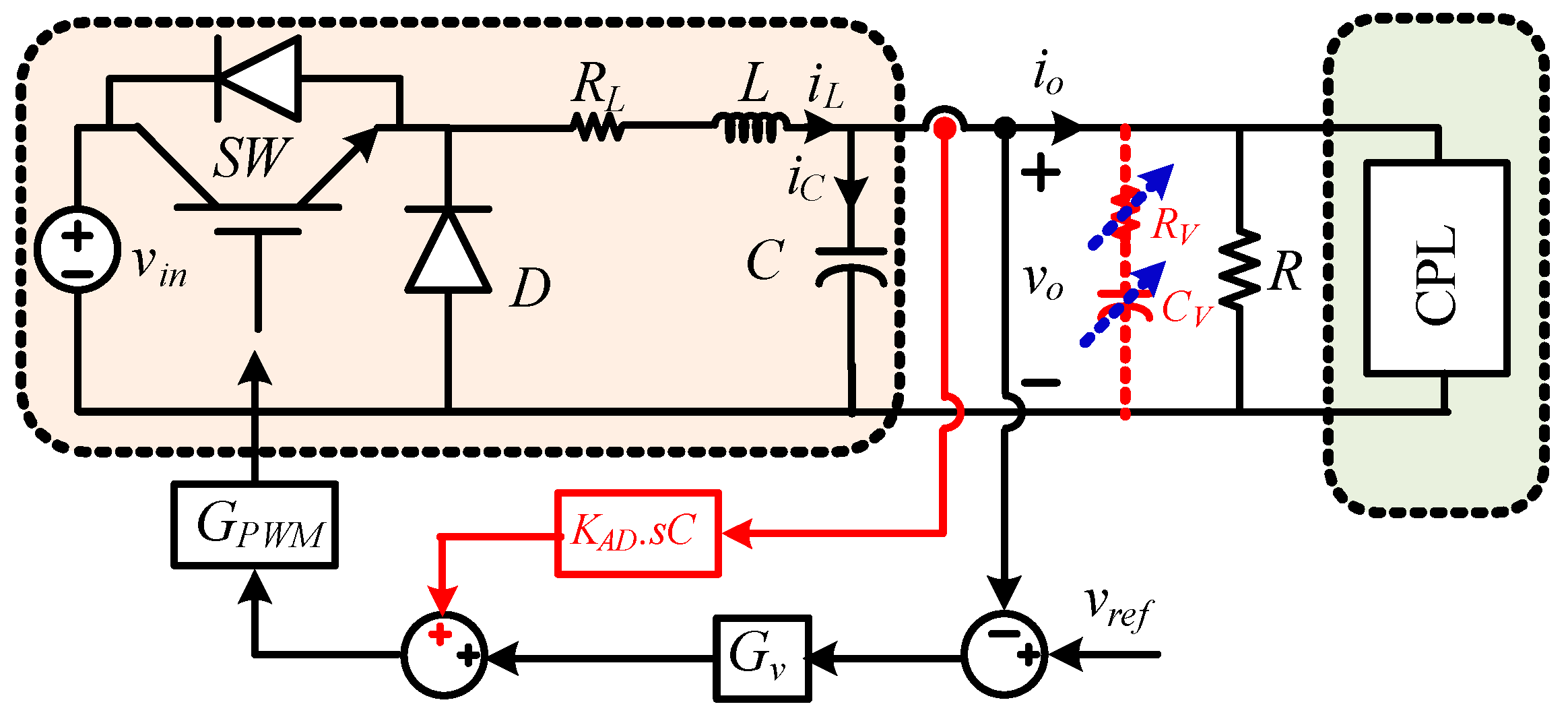
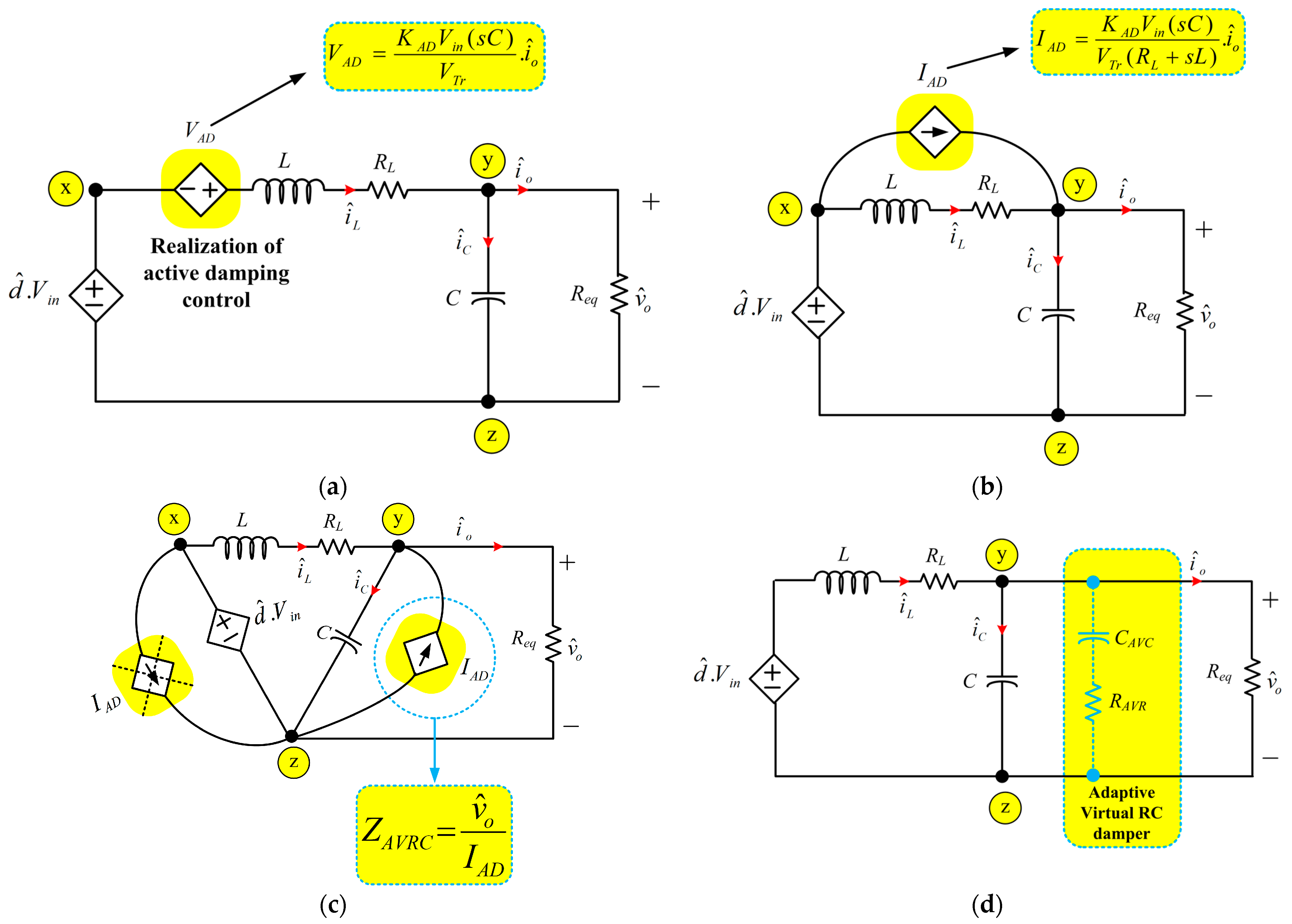
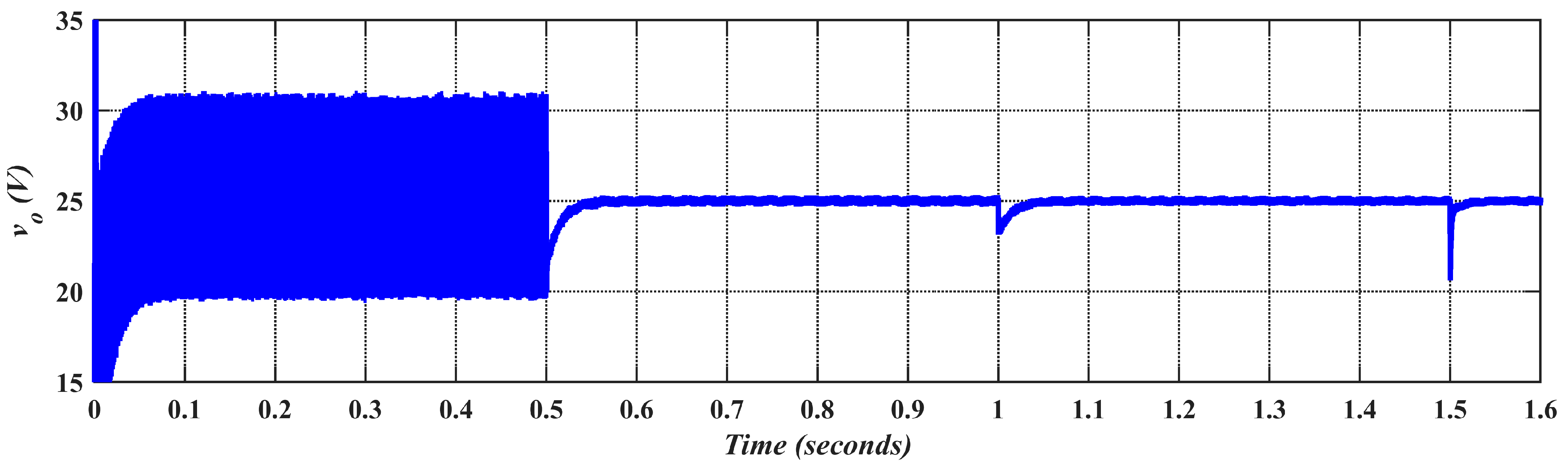
Case study on Source Side Active Damping
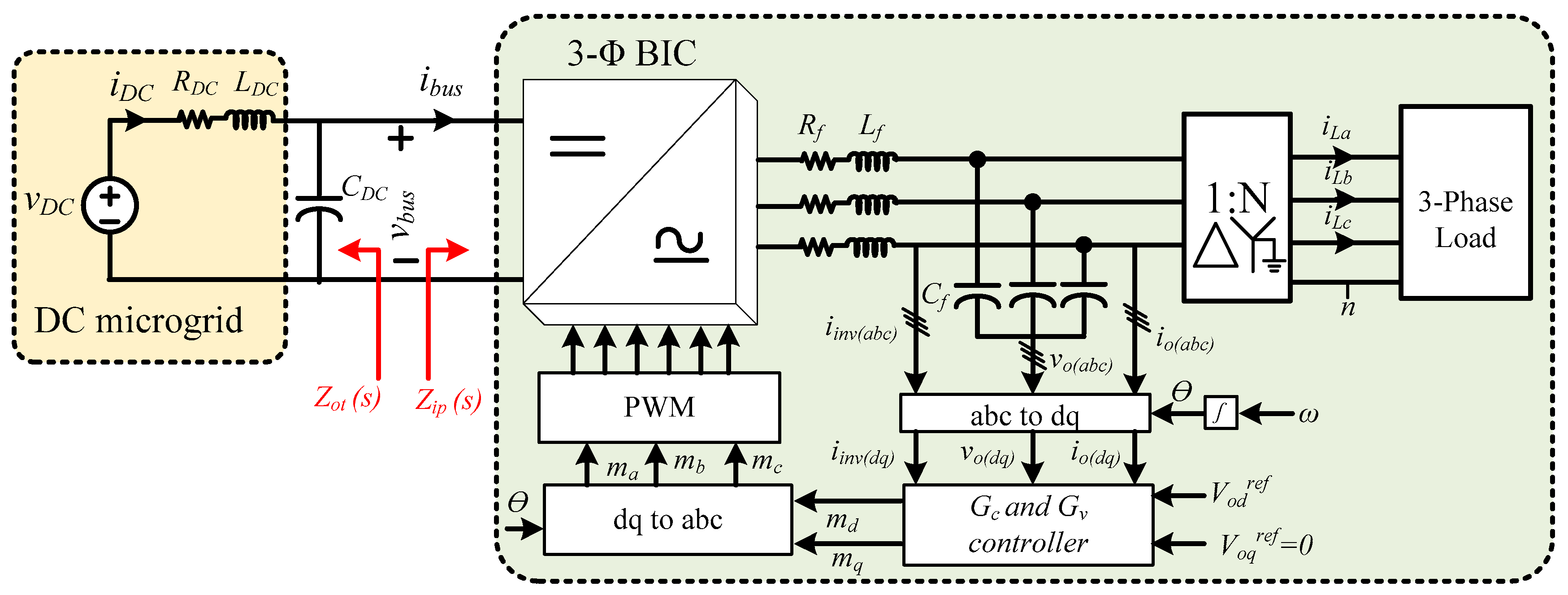
4.2.2. CPL Side Active Damping
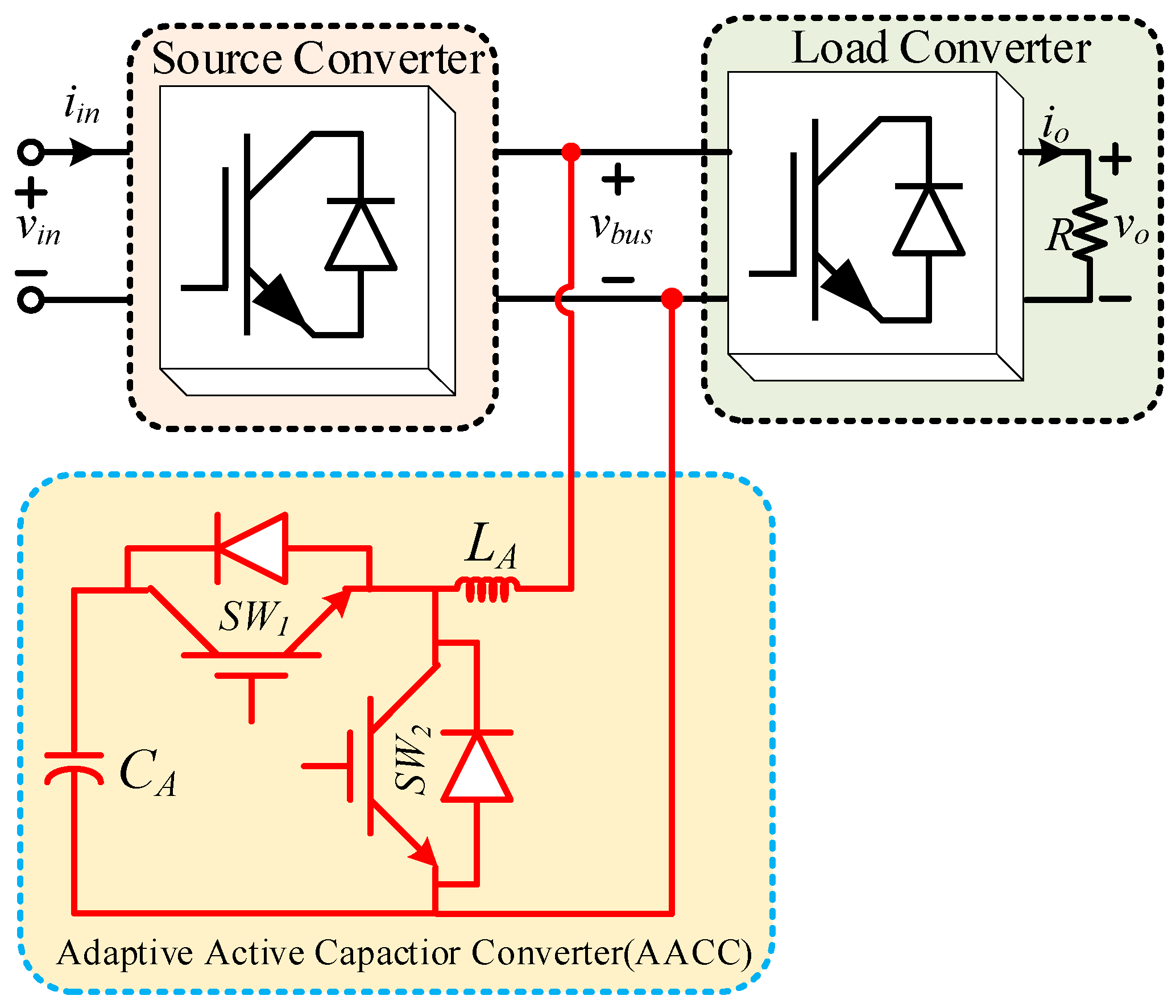
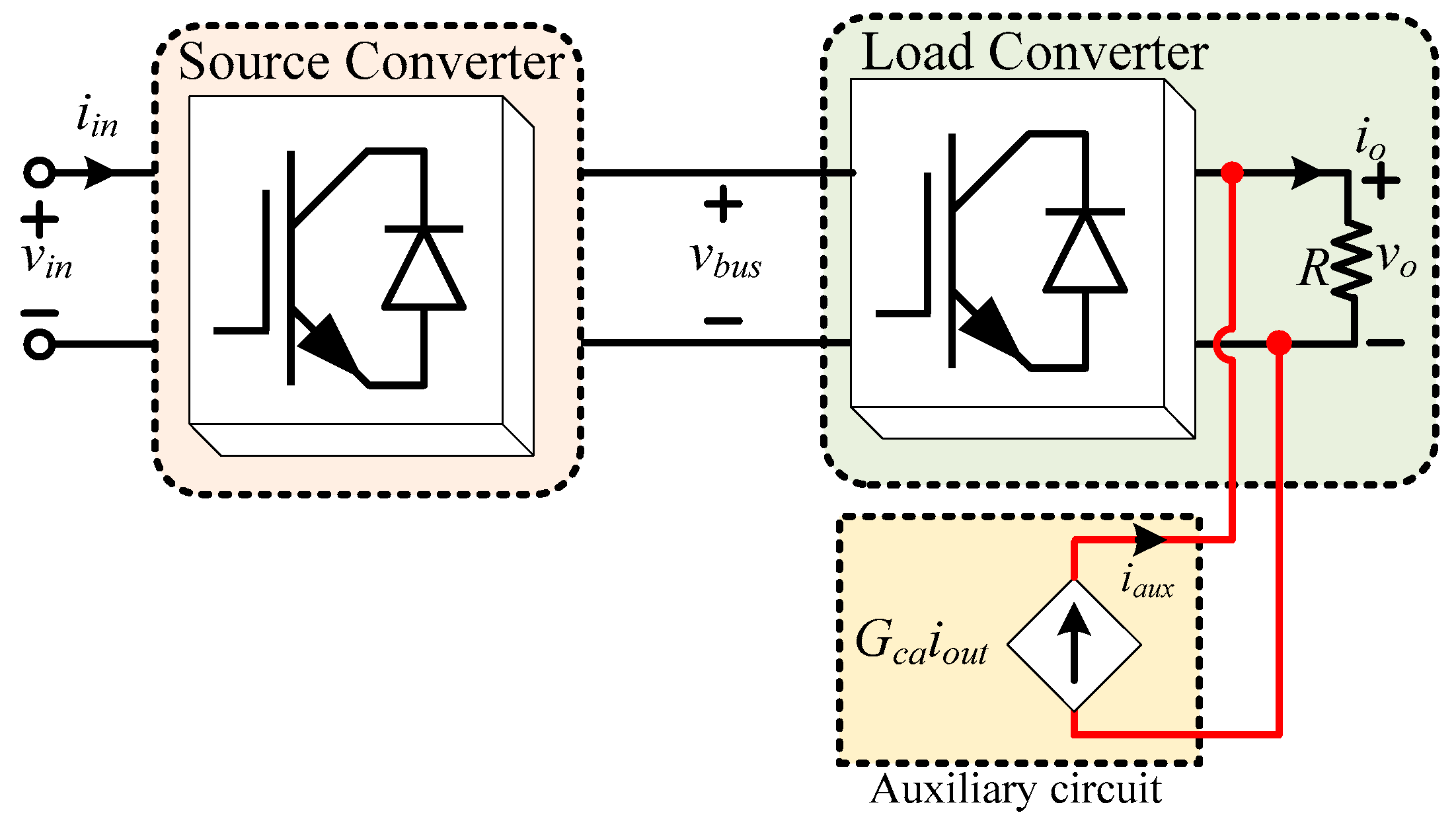
4.2.3. Using Auxiliary Circuits or Intermediate-Level Active Damping
5. The Delays in Digitally Controlled Systems and Their Effect on Active Damping Control
6. Challenges and Future Research Directions
- An investigation of the generalization of active stabilizing techniques is required for the complex DC MGs. Moreover, the stability issues for DC MGs in the presence of dynamic loads and CPLs need to be addressed.
- The linear active damping techniques are operating point-dependent and can compensate only a limited amount of CPL. Therefore, non-linear damping techniques can be investigated to address the above problem.
- Further, the tuning parameters of active damping techniques are converter-dependent and they would vary from one converter to another. Thus, converter-free active damping techniques need to be developed to address the problems of converter dependence.
- The performance of damping techniques depends on converters and the modelling of the complex system and the perfect design of parameters. Therefore, to make model-free stabilization, one can look into data-driven control techniques to improve the stability of the DC MGs.
- In a more complicated DC network with several source converters, interactions between their control loops have an impact on the converter performance. Therefore, the modelling and stability analysis of the much more practical systems, e.g., multi-terminal DC MG with CPL, is required to investigate.
- Research on the optimal placement of CPL (e.g., fast DC chargers for EVs) is further required to ensure the stability of the DC MGs, a practical scenario in an EV parking lot with incoming and outgoing EVs.
- When addressing the effects of CPL in cascaded systems, the majority of active damping techniques focused on small-signal stability, which can only ensure stability for small disturbances. However, the system under large disturbances is also important. Thus, further exploration with large-signal stability is required to ensure the global stability of the system over a wide dynamic range.
- Based on the observations above, we can conclude that the majority of the work is based on a cascaded DC-DC converter system. However, there has been very little work with cascaded DC–AC converter systems or in islanded MGs. Future research is still needed.
- Finally, research that aims to reduce the number of sensors, controller order and implementation complexity is required.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Active damping | |
| Direct Current microgrids | |
| Constant power load | |
| s | Electric vehicles |
| Point of load converter | |
| Department of Energy | |
| Zero-order hold | |
| Active damping | |
| Microgrids | |
| Renewable energy generation | |
| Source-side series virtual impedance | |
| Load-side series virtual impedance | |
| Load-side parallel virtual impedance | |
| Adaptive series virtual impedance | |
| Adaptive parallel virtual impedance | |
| Low pass filter | |
| High pass filter | |
| Bandpass filter | |
| Gain of active damping | |
| Low voltage direct current | |
| Pulse width modulation | |
| Microgrid exchange group | |
| more electric aircraft | |
| negative incremental impedance | |
| Gain and phase margin | |
| Energy source analysis consortium | |
| Maximum peak criterion | |
| Loss-free resistance | |
| Adaptive active capacitor converter |
References
- Fotopoulou, M.; Rakopoulos, D.; Trigkas, D.; Stergiopoulos, F.; Blanas, O.; Voutetakis, S. State of the Art of Low and Medium Voltage Direct Current (DC) Microgrids. Energies 2021, 14, 5595. [Google Scholar] [CrossRef]
- Abraham, D.S.; Verma, R.; Kanagaraj, L.; Giri Thulasi Raman, S.R.; Rajamanickam, N.; Chokkalingam, B.; Sekar, K.M.; Mihet-Popa, L. Electric Vehicles Charging Stations’ Architectures, Criteria, Power Converters, and Control Strategies in Microgrids. Electronics 2021, 10, 1895. [Google Scholar] [CrossRef]
- Al-Ismail, F. DC Microgrid Planning, Operation, and Control: A Comprehensive Review. IEEE Access 2021, 9, 36154–36172. [Google Scholar] [CrossRef]
- Dragicevic, T.; Lu, X.; Vasquez, J.; Guerrero, J. DC Microgrids—Part I: A Review of Control Strategies and Stabilization Techniques. IEEE Trans. Power Electron. 2015, 31, 4876–4891. [Google Scholar] [CrossRef]
- Dragičević, T.; Wheeler, P.; Blaabjerg, F. DC Distribution Systems and Microgrids; IET: Stevenage, UK, 2018. [Google Scholar]
- Han, Y.; Ning, X.; Yang, P.; Xu, L. Review of Power Sharing, Voltage Restoration and Stabilization Techniques in Hierarchical Controlled DC Microgrids. IEEE Access 2019, 7, 149202–149223. [Google Scholar] [CrossRef]
- Smith, M.; Ton, D. Key Connections: The U.S. Department of Energy’s Microgrid Initiative. IEEE Power Energy Mag. 2013, 11, 22–27. [Google Scholar] [CrossRef]
- Gries, M.; Wasynczuk, O.; Selby, B.; Lamm, P. Designing for Large-Displacement Stability in Aircraft Power Systems. SAE Int. J. Aerosp. 2008, 1, 894–902. [Google Scholar] [CrossRef]
- Mukherjee, N.; Strickland, D. Control of Cascaded DC-DC Converter Based Hybrid Battery Energy Storage Systems: Part—I: Stability Issue. IEEE Trans. Ind. Electron. 2015, 63, 2340–2349. [Google Scholar] [CrossRef]
- Julian, A.; Cuzner, R. Design, Modelling and Stability Analysis of an Integrated Shipboard DC Power System. In Proceedings of the 2009 IEEE Electric Ship Technologies Symposium, Baltimore, MD, USA, 20–22 April 2009. [Google Scholar]
- Smithson, S.; Williamson, S. Constant Power Loads in More Electric Vehicles—An Overview. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- Krein, P. Data Center Challenges and Their Power Electronics. CPSS Trans. Power Electron. Appl. 2017, 2, 39–46. [Google Scholar] [CrossRef]
- Kumar, D.; Zare, F.; Ghosh, A. DC Microgrid Technology: System Architectures, AC Grid Interfaces, Grounding Schemes, Power Quality, Communication Networks, Applications, and Standardizations Aspects. IEEE Access 2017, 5, 12230–12256. [Google Scholar] [CrossRef]
- Bhargavi, K.; Jayalakshmi, N.; Gaonkar, D.; Shrivastava, A.; Jadoun, V. A Comprehensive Review on Control Techniques for Power Management of Isolated DC Microgrid System Operation. IEEE Access 2021, 9, 32196–32228. [Google Scholar] [CrossRef]
- Garcés, A. Modeling, Operation, and Analysis of DC Grids: From High Power DC Transmission to DC Microgrids; Academic Press: San Diego, CA, USA, 2021. [Google Scholar]
- Singh, S.; Gautam, A.; Fulwani, D. Constant power loads and their effects in DC distributed power systems: A review. Renew. Sustain. Energy Rev. 2017, 72, 407–421. [Google Scholar] [CrossRef]
- Shafiee, Q.; Dragicevic, T.; Vasquez, J.; Guerrero, J. Modeling, Stability Analysis and Active Stabilization of Multiple DC-Microgrid Clusters. In Proceedings of the 2014 IEEE International Energy Conference (ENERGYCON), Cavtat, Croatia, 13–16 May 2014. [Google Scholar]
- Emadi, A.; Khaligh, A.; Rivetta, C.; Williamson, G. Constant Power Loads and Negative Impedance Instability in Automotive Systems: Definition, Modeling, Stability, and Control of Power Electronic Converters and Motor Drives. IEEE Trans. Veh. Technol. 2006, 55, 1112–1125. [Google Scholar] [CrossRef]
- Bottrell, N.; Prodanovic, M.; Green, T. Dynamic Stability of a Microgrid with an Active Load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. [Google Scholar] [CrossRef]
- Liang, H.; Liu, Z.; Liu, H. Stabilization Method Considering Disturbance Mitigation for DC Microgrids with Constant Power Loads. Energies 2019, 12, 873. [Google Scholar] [CrossRef]
- Ahmadi, R. Dynamic Modeling, Stability Analysis, and Controller Design for DC Distribution Systems. Ph.D. Thesis, Missouri University of Science and Technology, Rolla, MO, USA, 2013. [Google Scholar]
- Riccobono, A.; Santi, E. Comprehensive Review of Stability Criteria for DC Power Distribution Systems. IEEE Trans. Ind. Appl. 2014, 50, 3525–3535. [Google Scholar] [CrossRef]
- Hossain, E.; Perez, R.; Nasiri, A.; Padmanaban, S. A Comprehensive Review on Constant Power Loads Compensation Techniques. IEEE Access 2018, 6, 33285–33305. [Google Scholar] [CrossRef]
- Lorzadeh, O.; Lorzadeh, I.; Soltani, M.; Hajizadeh, A. Source-Side Virtual RC Damper-Based Stabilization Technique for Cascaded Systems in DC Microgrids. IEEE Trans. Energy Convers. 2021, 36, 1883–1895. [Google Scholar] [CrossRef]
- Hussain, M.; Agarwal, V. A Novel Feedforward Stabilizing Technique to Damp Power Oscillations Caused by DC-DC Converters Fed from a DC Bus. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 1528–1535. [Google Scholar] [CrossRef]
- Emadi, A.; Fahimi, B.; Ehsani, M. On the concept of negative impedance instability in the more electric aircraft power systems with constant power loads. SAE Trans. 1999, 108, 689–699. [Google Scholar]
- Griffo, A.; Wang, J. Modeling and stability analysis of hybrid power systems for the more electric aircraft. Electr. Power Syst. Res. 2012, 82, 59–67. [Google Scholar] [CrossRef]
- Zhang, F.; Yan, Y. Start-up process and step response of a DC-DC converter loaded by constant power loads. IEEE Trans. Ind. Electron. 2011, 58, 298–304. [Google Scholar] [CrossRef]
- Jusoh, A.B. The Instability Effect of Constant Power Loads. In Proceedings of the PECon 2004. Proceedings. National Power and Energy Conference, Kuala Lumpur, Malaysia, 29–30 November 2004. [Google Scholar]
- Zamierczuk, M.K.; Cravens, R.C.; Reatti, A. Closed-Loop Input Impedance of PWM Buck-Derived DC-DC Converters. In Proceedings of the Proceedings of IEEE International Symposium on Circuits and Systems—ISCAS’94, London, UK, 30 May–2 June 1994. [Google Scholar]
- Rivetta, C.; Williamson, G.A.; Emadi, A. Constant Power Loads and Negative Impedance Instability in Sea and Undersea Vehicles: Statement of the Problem and Comprehensive Large-Signal Solution. In Proceedings of the IEEE Electric Ship Technologies Symposium, 2005, Philadelphia, PA, USA, 27 July 2005. [Google Scholar]
- Kim, S.; Williamson, S. Negative Impedance Instability Compensation in More Electric Aircraft DC Power Systems Using State Space Pole Placement Control. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference 2011, Chicago, IL, USA, 6–9 September 2011. [Google Scholar]
- Liu, X.; Zhou, Y.; Zhang, W.; Ma, S. Stability Criteria for Constant Power Loads with Multistage LC Filters. IEEE Trans. Veh. Technol. 2011, 60, 2042–2049. [Google Scholar] [CrossRef]
- Emadi, A.; Ehsani, M.; Miller, J.M. Vehicular Electric Power Systems: Land, Sea, Air, and Space Vehicles; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- AL-Nussairi, M.; Bayindir, R.; Padmanaban, S.; Mihet-Popa, L.; Siano, P. Constant Power Loads (CPL) with Microgrids: Problem Definition, Stability Analysis and Compensation Techniques. Energies 2017, 10, 1656. [Google Scholar] [CrossRef]
- Emadi, A.; Ehsani, M. Negative Impedance Stabilizing Controls for PWM DC-DC Converters Using Feedback Linearization Techniques. In Proceedings of the Collection of Technical Papers. 35th Intersociety Energy Conversion Engineering Conference and Exhibit (IECEC) (Cat. No.00CH37022), Las Vegas, NV, USA, 24–28 July 2000. [Google Scholar]
- Rivetta, C.; Emadi, A.; Williamson, G.; Jayabalan, R.; Fahimi, B. Analysis and control of a buck DC-DC converter operating with constant power load in sea and undersea vehicles. IEEE Trans. Ind. Appl. 2006, 42, 559–572. [Google Scholar] [CrossRef]
- Ahmadi, R.; Paschedag, D.; Ferdowsi, M. Analyzing stability issues in a cascaded converter system comprised of two voltage-mode controlled dc-dc converters. In Proceedings of the 2011 Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 6–11 March 2011. [Google Scholar]
- Khaligh, A.; Rahimi, A.; Chakraborty, A.; Emadi, A. Analysis and Stabilization of a Buck-Boost DC-DC Converter Feeding Constant Power Loads in Parallel with Conventional Loads in Vehicular Systems. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006. [Google Scholar]
- Vesti, S.; Oliver, J.; Prieto, R.; Cobos, J.; Suntio, T. Simplified Small-Signal Stability Analysis for Optimized Power System Architecture. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013. [Google Scholar]
- Basso, C.P. Designing Control Loops for Linear and Switching Power Supplies: A Tutorial Guide; Artech House: Norwood, MA, USA, 2012. [Google Scholar]
- Suntio, T. Dynamic Profile of Switched-Mode Converter: Modeling, Analysis and Control; Wiley-VCH: Weinheim, Germany, 2009. [Google Scholar]
- Hassan, M.; Su, C.-L.; Chen, F.-Z.; Lo, K.-Y. Adaptive passivity-based control of a DC-DC boost power converter supplying constant power and constant voltage loads. IEEE Trans. Ind. Electron. 2022, 69, 6204–6214. [Google Scholar] [CrossRef]
- Hassan, M.A.; Su, C.-L.; Pou, J.; Sulligoi, G.; Almakhles, D.; Bosich, D.; Guerrero, J.M. DC shipboard microgrids with constant power loads: A review of Advanced Nonlinear Control Strategies and Stabilization Techniques. IEEE Trans. Smart Grid 2022, 13, 3422–3438. [Google Scholar] [CrossRef]
- Tian, Y.; Loh, P.; Chen, Z.; Deng, F.; Hu, Y. Impedance interactions in bidirectional cascaded converter. IET Power Electron. 2016, 9, 2482–2491. [Google Scholar] [CrossRef]
- Middlebrook, R.D. Input Filter Considerations in Design and Application of Switching Regulators. IEEE Ind. Appl. Soc. Annu. Meet. 1976, IA-12, 366–382. [Google Scholar]
- Li, P.; Lehman, B. Performance prediction of DC-DC converters with impedances as loads. IEEE Trans. Power Electron. 2004, 19, 201–209. [Google Scholar] [CrossRef]
- Pidaparthy, S.; Choi, B. Control Design and Loop Gain Analysis of DC-to-DC Converters Intended for General Load Subsystems. Math. Probl. Eng. 2015, 2015, 426315. [Google Scholar] [CrossRef]
- Mayo-Maldonado, J.; Ruiz-Martinez, O.; Escobar, G.; Maupong, T.; Valdez-Resendiz, J.; Rosas-Caro, J. Power shaping control of DC-DC converters with constant power loads. Control Eng. Pract. 2020, 105, 104639. [Google Scholar] [CrossRef]
- Erickson, R.W.; Dragan, M. Fundamentals of Power Electronics; Kluwer Academic: Norwell, MA, USA, 2001. [Google Scholar]
- Pourmohammad, M.; Toulabi, M.; Rayati, M.; Khajehoddin, S. Load type impacts on the stability and robustness of DC microgrids. Int. J. Electr. Power & Energy Syst. 2022, 140, 108036. [Google Scholar] [CrossRef]
- Lorzadeh, O.; Lorzadeh, I.; Soltani, M.; Hajizadeh, A.; Jessen, K. Active Load Stabilization of Cascaded Systems in DC Microgrids Using Adaptive Parallel-Virtual-Resistance Control Scheme. IEEE J. Emerg. Sel. Top. Power Electron. 2021. [Google Scholar] [CrossRef]
- Emadi, A.; Ehsani, M. Multi-Converter Power Electronic Systems: Definition and Applications. In Proceedings of the 2001 IEEE 32nd Annual Power Electronics Specialists Conference (IEEE Cat. No.01CH37230), Vancouver, BC, Canada, 17–21 June 2001. [Google Scholar]
- Khaligh, A.; Emadi, A.; Williamson, G.A.; Rivetta, C. Constant Power Load Characteristics in Multi-Converter Automotive Power Electronic Intensive Systems; SAE Technical Paper 2005-01-3451; SAE International: Warrendale, PA, USA, 2005. [Google Scholar]
- Khaligh, A.; Emadi, A. Power Alignment, New Digital Control Approach for a DC-DC Flyback Converter with Constant Power Loads. In Proceedings of the 2006 1ST IEEE Conference on Industrial Electronics and Applications, Singapore, 24–26 May 2006. [Google Scholar]
- Tahim, A.; Pagano, D.; Lenz, E.; Stramosk, V. Modeling and Stability Analysis of Islanded DC Microgrids Under Droop Control. IEEE Trans. Power Electron. 2015, 30, 4597–4607. [Google Scholar] [CrossRef]
- Herrera, L.C.; Tsao, B.-H. Analysis and control of energy storage in aircraft power systems with pulsed power loads. SAE Int. J. Aerosp. 2016, 9, 8–13. [Google Scholar] [CrossRef]
- Ansari, S.; Zhang, J.; Singh, R. A review of stabilization methods for DCMG with CPL, the role of bandwidth limits and droop control. Prot. Control Mod. Power Syst. 2022, 7, 2. [Google Scholar] [CrossRef]
- Hankaniemi, M. Dynamical Profile of Switched-Mode Converter—Fact or Fiction? Ph.D. Thesis, Tampere University of Technology, Tampere, Finland, 2007. [Google Scholar]
- Hussain, M.; Mishra, R.; Agarwal, V. A Frequency-Dependent Virtual Impedance for Voltage-Regulating Converters Feeding Constant Power Loads in a DC Microgrid. IEEE Trans. Ind. Appl. 2018, 54, 5630–5639. [Google Scholar] [CrossRef]
- Wu, M.; Lu, D.; Tse, C. Direct and Optimal Linear Active Methods for Stabilization of LC Input Filters and DC/DC Converters Under Voltage Mode Control. IEEE J. Emerg. Sel. Top. Circuits Syst. 2015, 5, 402–412. [Google Scholar] [CrossRef]
- Blaabjerg, F. Control of Power Electronic Converters and Systems; Academic Press: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Sun, J. Small-signal methods for AC Distributed Power Systems—A Review. IEEE Trans. Power Electron. 2009, 24, 2545–2554. [Google Scholar]
- Wang, Y.; Wang, X.; Chen, Z.; Blaabjerg, F. Small-Signal Stability Analysis of inverter-fed power systems using component connection method. IEEE Trans. Smart Grid 2018, 9, 5301–5310. [Google Scholar] [CrossRef]
- Wildrick, C.M.; Lee, F.C.; Cho, B.H.; Choi, B. A method of defining the load impedance specification for a stable distributed power system. IEEE Trans. Power Electron. 1995, 10, 280–285. [Google Scholar] [CrossRef]
- Feng, X.; Ye, Z.; Xing, K.; Lee, F.C.; Borojevic, D. Impedance Specification and Impedance Improvement for DC Distributed Power System. In Proceedings of the 30th Annual IEEE Power Electronics Specialists Conference. Record. (Cat. No.99CH36321), Charleston, SC, USA, 1 July 1999. [Google Scholar]
- Feng, X.; Ye, Z.; Xing, K.; Lee, F.C.; Borojevic, D. Individual Load Impedance Specification for a Stable DC Distributed Power System. In Proceedings of the APEC’99. Fourteenth Annual Applied Power Electronics Conference and Exposition. 1999 Conference Proceedings (Cat. No.99CH36285), Dallas, TX, USA, 14–18 March 1999. [Google Scholar]
- Feng, X.; Liu, J.; Lee, F.C. Impedance specifications for stable DC distributed Power Systems. IEEE Trans. Power Electron. 2002, 17, 157–162. [Google Scholar] [CrossRef]
- Sudhoff, S.D.; Glover, S.F.; Lamm, P.T.; Schmucker, D.H.; Delisle, D.E. Admittance space stability analysis of power electronic systems. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 965–973. [Google Scholar] [CrossRef]
- Sudhoff, S.D.; Glover, S.F. Three-Dimensional Stability Analysis of DC Power Electronics Based Systems. In Proceedings of the 2000 IEEE 31st Annual Power Electronics Specialists Conference. Conference Proceedings (Cat. No.00CH37018), Galway, Ireland, 23 June 2000. [Google Scholar]
- Vesti, S.; Suntio, T.; Oliver, J.A.; Prieto, R.; Cobos, J.A. Effect of control method on impedance-based interactions in a buck converter. IEEE Trans. Power Electron. 2013, 28, 5311–5322. [Google Scholar] [CrossRef]
- Suntio, T.; Messo, T.; Berg, M.; Alenius, H.; Reinikka, T.; Luhtala, R.; Zenger, K. Impedance-Based Interactions in Grid-Tied Three-Phase Inverters in Renewable Energy Applications. Energies 2019, 12, 464. [Google Scholar] [CrossRef]
- Zhang, X.; Ruan, X.; Tse, C. Impedance-Based Local Stability Criterion for DC Distributed Power Systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2015, 62, 916–925. [Google Scholar] [CrossRef]
- Fang, J.; Shuai, Z.; Li, Y.; Wang, Z.; Wu, X.; Shen, X.; Shen, Z.J. Stability Investigation and Improvement for DC Cascade Systems with Simplified Impedance-Based Stability Criterion. CSEE J. Power Energy Syst. 2022. [Google Scholar] [CrossRef]
- Du, W.; Zhang, J.; Zhang, Y.; Qian, Z. Stability Criterion for Cascaded System with Constant Power Load. IEEE Trans. Power Electron. 2013, 28, 1843–1851. [Google Scholar] [CrossRef]
- Dragicevic, T. Dynamic Stabilization of DC Microgrids with Predictive Control of Point-of-Load Converters. IEEE Trans. Power Electron. 2018, 33, 10872–10884. [Google Scholar] [CrossRef]
- Cespedes, M.; Xing, L.; Sun, J. Constant-Power Load System Stabilization by Passive Damping. IEEE Trans. Power Electron. 2011, 26, 1832–1836. [Google Scholar] [CrossRef]
- Erickson, R. Optimal Single Resistors Damping of Input Filters. In Proceedings of the APEC’99. Fourteenth Annual Applied Power Electronics Conference and Exposition. 1999 Conference Proceedings (Cat. No.99CH36285), Dallas, TX, USA, 14–18 March 1999. [Google Scholar]
- Wang, H.; Blaabjerg, F. Reliability of Capacitors for DC-Link Applications in Power Electronic Converters—An Overview. IEEE Trans. Ind. Appl. 2014, 50, 3569–3578. [Google Scholar] [CrossRef]
- Rahimi, A.; Emadi, A. An Analytical Investigation of DC/DC Power Electronic Converters with Constant Power Loads in Vehicular Power Systems. IEEE Trans. Veh. Technol. 2009, 58, 2689–2702. [Google Scholar] [CrossRef]
- Singer, S. Realization of loss-free resistive elements. IEEE Trans. Circuits Syst. 1990, 37, 54–60. [Google Scholar] [CrossRef]
- Radwan, A.; Mohamed, Y. Linear Active Stabilization of Converter-Dominated DC Microgrids. IEEE Trans. Smart Grid 2012, 3, 203–216. [Google Scholar] [CrossRef]
- Lee, J.-S.; Choi, Y.-J. A Stability Improvement Method of DC Microgrid System Using Passive Damping and Proportional-Resonance (PR) Control. Sustainability 2021, 13, 9542. [Google Scholar] [CrossRef]
- Lu, X.; Sun, K.; Guerrero, J.; Vasquez, J.; Huang, L.; Wang, J. Stability Enhancement Based on Virtual Impedance for DC Microgrids with Constant Power Loads. IEEE Trans. Smart Grid 2015, 6, 2770–2783. [Google Scholar] [CrossRef]
- Rahimi, A.; Emadi, A. Active Damping in DC/DC Power Electronic Converters: A Novel Method to Overcome the Problems of Constant Power Loads. IEEE Trans. Ind. Electron. 2009, 56, 1428–1439. [Google Scholar] [CrossRef]
- Ashourloo, M.; Khorsandi, A.; Mokhtari, H. Stabilization of DC Microgrids with Constant-Power Loads by an Active Damping Method. In Proceedings of the 4th Annual International Power Electronics, Drive Systems and Technologies Conference, Tehran, Iran, 13–14 February 2013. [Google Scholar]
- Kumar, R.; Bhende, C.N. A virtual adaptive RC damper control method to suppress voltage oscillation in DC microgrid. Int. J. Electr. Power Energy Syst. 2023, 146, 108795. [Google Scholar] [CrossRef]
- Wu, M.; Lu, D. A Novel Stabilization Method of LC Input Filter with Constant Power Loads without Load Performance Compromise in DC Microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4552–4562. [Google Scholar] [CrossRef]
- Zhang, X.; Zhong, Q.; Ming, W. Source-Side Series-Virtual-Impedance Control Strategy to Stabilize the Cascaded System with Improved Performance. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016. [Google Scholar]
- Aldhaheri, A.; Etemadi, A. Impedance Decoupling in DC Distributed Systems to Maintain Stability and Dynamic Performance. Energies 2017, 10, 470. [Google Scholar] [CrossRef]
- Aldhaheri, A.; Etemadi, A. Adaptive Stabilization and Dynamic Performance Preservation of Cascaded DC-DC Systems by Incorporating Low Pass Filters. Energies 2018, 11, 440. [Google Scholar] [CrossRef]
- Liao, J.; Guo, C.; Huang, Y.; Qiu, G.; Zhou, N.; Wang, Q. Active damping control of cascaded DC converter in DC microgrids based on optimized parallel virtual resistance. IEEE J. Emerg. Sel. Top. Ind. Electron. 2022, 1–10. [Google Scholar] [CrossRef]
- Zhang, X.; Ruan, X.; Zhong, Q.-C. Improving the stability of cascaded DC/DC converter systems via shaping the input impedance of the load converter with a parallel or series virtual impedance. IEEE Trans. Ind. Electron. 2015, 62, 7499–7512. [Google Scholar] [CrossRef]
- Hussain, M.N.; Agarwal, V. Optimal placement of constant power loads at different buses of a DC microgrid ensuring maximum stability margins. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 510–519. [Google Scholar] [CrossRef]
- Hussain, M.N.; Melath, G.; Agarwal, V. An active damping technique for PI and predictive controllers of an interlinking converter in an islanded hybrid microgrid. IEEE Trans. Power Electron. 2021, 36, 5521–5529. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Small-signal stability analysis of three-phase AC systems in the presence of constant power loads based on measured D-q frame impedances. IEEE Trans. Power Electron. 2015, 30, 5952–5963. [Google Scholar] [CrossRef]
- Wen, B.; Burgos, R.; Boroyevich, D.; Mattavelli, P.; Shen, Z. AC stability analysis and dq frame impedance specifications in power-electronics-based Distributed Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1455–1465. [Google Scholar] [CrossRef]
- Zhang, X.; Ming, W.-L.; Zhong, Q.-C.; Ruan, X.-B. Stabilization of a Cascaded DC System via Adding a Virtual Impedance in Parallel with the Load Converter. In Proceedings of the 2015 IEEE 6th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aachen, Germany, 22–25 June 2015. [Google Scholar]
- Zhang, X.; Zhong, Q.-C.; Ming, W.-L. Stabilization of cascaded DC/DC converters via adaptive series-virtual-impedance control of the load converter. IEEE Trans. Power Electron. 2016, 31, 6057–6063. [Google Scholar] [CrossRef]
- Zhang, X.; Zhong, Q.-C.; Ming, W.-L. Stabilization of a cascaded DC converter system via adding a virtual adaptive parallel impedance to the input of the load converter. IEEE Trans. Power Electron. 2016, 31, 1826–1832. [Google Scholar] [CrossRef]
- He, B.; Chen, W.; Li, X.; Shu, L.; Ruan, X. A power adaptive impedance reshaping strategy for cascaded DC system with Buck-type constant power load. IEEE Trans. Power Electron. 2022, 37, 8909–8920. [Google Scholar] [CrossRef]
- Cyriac, S.; Haritha, B.; Kobaku, T.; Ramchand, R. Virtual Impedance-Based Stabilization of Dual Active Bridge Converter Cascaded with LC Filter. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020. [Google Scholar]
- Zhang, X.; Ruan, X.; Kim, H.; Tse, C.K. Adaptive active capacitor converter for improving stability of cascaded DC Power Supply System. IEEE Trans. Power Electron. 2013, 28, 1807–1816. [Google Scholar] [CrossRef]
- Shan, Z.; Fan, S.; Liu, X.; Ding, X.; Li, Z. Transient mitigation using an auxiliary circuit in cascaded DC-DC converter systems with virtual impedance control. IEEE Trans. Ind. Electron. 2022, 69, 4652–4664. [Google Scholar] [CrossRef]
- Pan, D.; Ruan, X.; Bao, C.; Li, W.; Wang, X. Capacitor-current-feedback active damping with reduced computation delay for improving robustness of LCL-type grid-connected inverter. IEEE Trans. Power Electron. 2014, 29, 3414–3427. [Google Scholar] [CrossRef]
- Sun, J.; Vieto, I.; Larsen, E.V.; Buchhagen, C. Impedance-Based Characterization of Digital Control Delay and Its Effects on System Stability. In Proceedings of the 2019 20th Workshop on Control and Modeling for Power Electronics (COMPEL), Toronto, ON, Canada, 17–20 June 2019. [Google Scholar]
- Lorzadeh, I.; Askarian Abyaneh, H.; Savaghebi, M.; Bakhshai, A.; Guerrero, J.M. Capacitor Current Feedback-Based Active Resonance Damping Strategies for Digitally-Controlled Inductive-Capacitive-Inductive-Filtered Grid-Connected Inverters. Energies 2016, 9, 642. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Stabilization Structure | Salient Features | Drawbacks |
|---|---|---|---|
| [24] |  |
|
|
| [52] |  |
|
|
| [60] |  |
|
|
| [85] |  |
|
|
| [86] |  |
|
|
| [88] |  |
|
|
| [89] |  |
|
|
| [90] |  |
|
|
| [91] |  |
|
|
| [92] |  |
|
|
| Ref. | Stabilization Structure | Salient Features | Drawbacks |
|---|---|---|---|
| [25] |  |
|
|
| [61] |  |
|
|
| [93] |  |
|
|
| [98] |  |
|
|
| [99] |  |
|
|
| [100] |  |
|
|
| [101] |  |
|
|
| [102] |  |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, R.; Bhende, C.N. Active Damping Stabilization Techniques for Cascaded Systems in DC Microgrids: A Comprehensive Review. Energies 2023, 16, 1339. https://doi.org/10.3390/en16031339
Kumar R, Bhende CN. Active Damping Stabilization Techniques for Cascaded Systems in DC Microgrids: A Comprehensive Review. Energies. 2023; 16(3):1339. https://doi.org/10.3390/en16031339
Chicago/Turabian StyleKumar, Ranjan, and Chandrashekhar N. Bhende. 2023. "Active Damping Stabilization Techniques for Cascaded Systems in DC Microgrids: A Comprehensive Review" Energies 16, no. 3: 1339. https://doi.org/10.3390/en16031339
APA StyleKumar, R., & Bhende, C. N. (2023). Active Damping Stabilization Techniques for Cascaded Systems in DC Microgrids: A Comprehensive Review. Energies, 16(3), 1339. https://doi.org/10.3390/en16031339