

Electric Vehicle Fast Charging: A Congestion-Dependent Stochastic Model Predictive Control under Uncertain Reference

 , ,
, ,  and
and
Abstract
:1. Introduction
- The reduction of the power flow at the POC of the service area with the main grid, which is essential in order to reduce operation costs of the service area;
- The tracking of the charging power demand for each charging PEV (i.e., the controller must strive to assign to each PEV the power it requires), which is needed in order to assure minimum charging times for the drivers;
- A third requirement is related with the operation of the ESS. It is desirable to avoid the ESS to become fully depleted during operation, since in this case, it cannot contribute to balance future charging demand peaks.
1.1. Literature Review
1.2. Paper Contributions
- We provide a stochastic MPC formulation for the service area control problem, assuming knowledge of the expected value of the charging demand, which is a realistic assumption, since it can be estimated by the service area operator from the historical data. The proposed formulation overcomes the drawback of deterministic MPC ones, which rely on the accurate knowledge of the demand profiles, which cannot be assumed in the fast-charging use case.
- The performances of two possible hardware configurations for the service area are compared, highlighting the peculiarities of each one.
- The proposed controller jointly manages the ESS control and also the charging station control, allowing to optimize the performance of the service area, while maximizing the experience of the users, by lowering the charging power to the PEVs only in periods of extreme congestion in the service area, by the means of a state-dependent weight in the MPC objective function.
- Finally, the proposed MPC objective function adapts (through a congestion-dependent weight) to the congestion state of the service area, which further improves the performance in terms of peak reduction at the POC with the grid.
1.3. Paper Structure
2. Problem Formalization
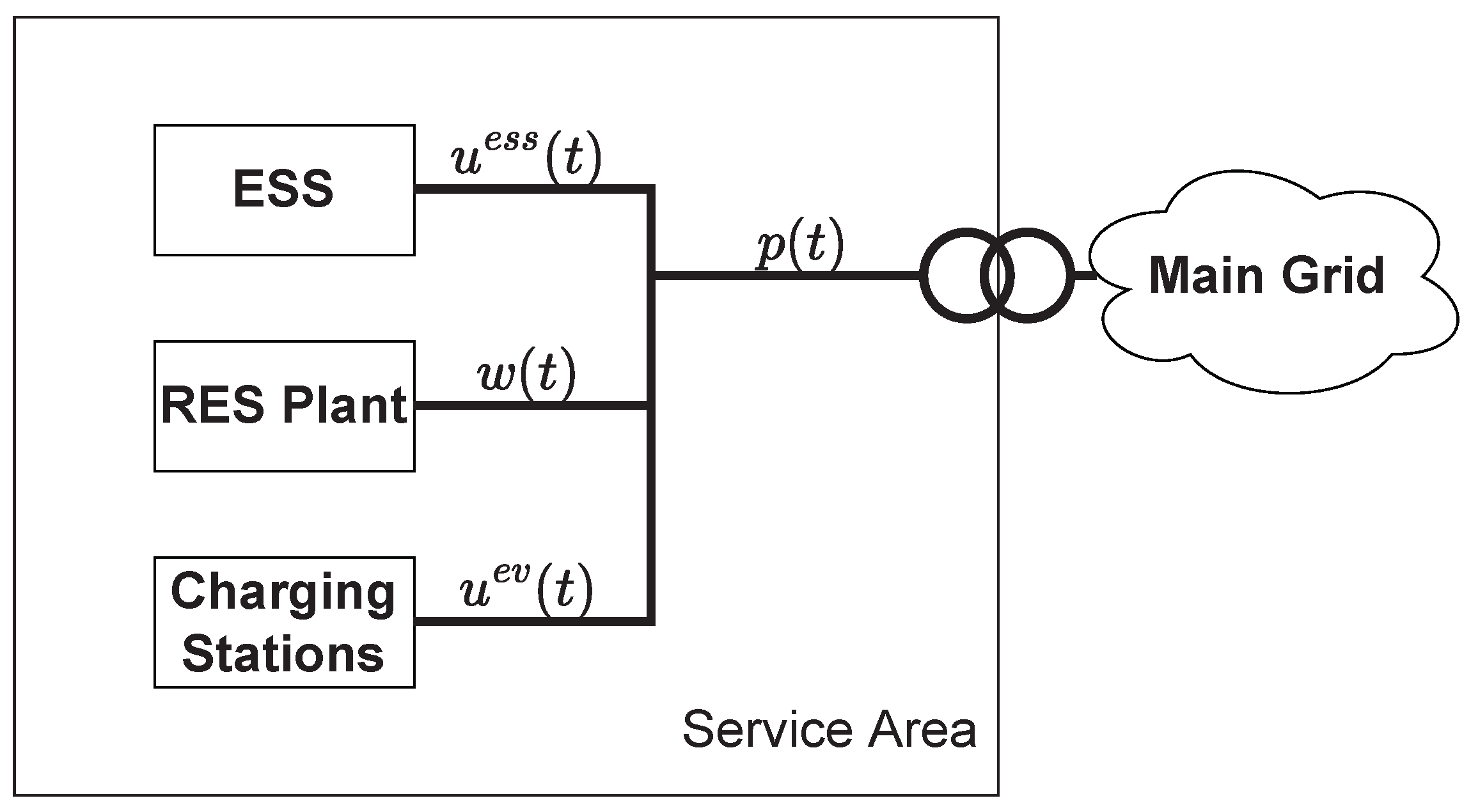
2.1. Case 1—BUS Configuration
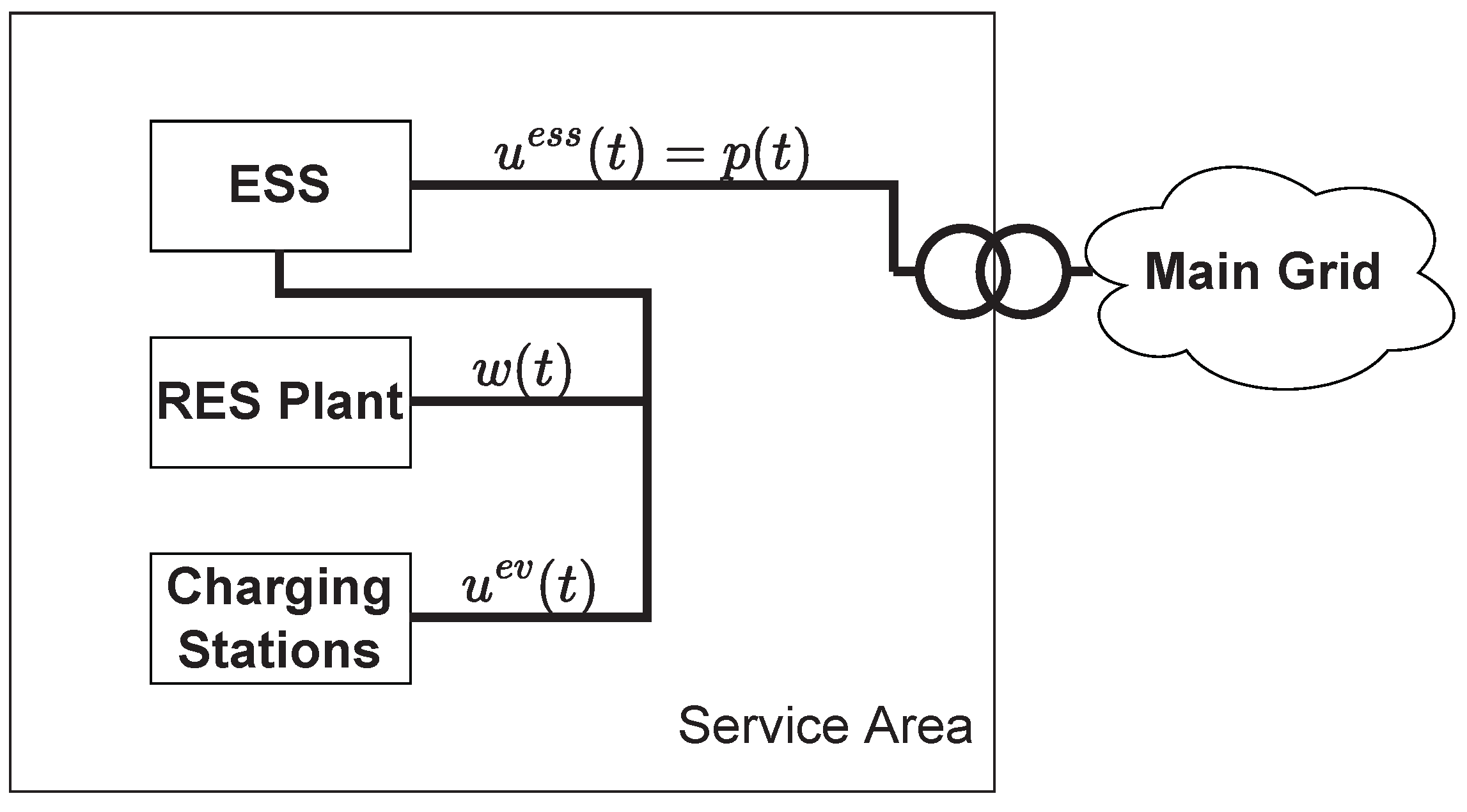
2.2. Case 2—UPS Configuration
3. Simulation Results
3.1. Simulation Setup
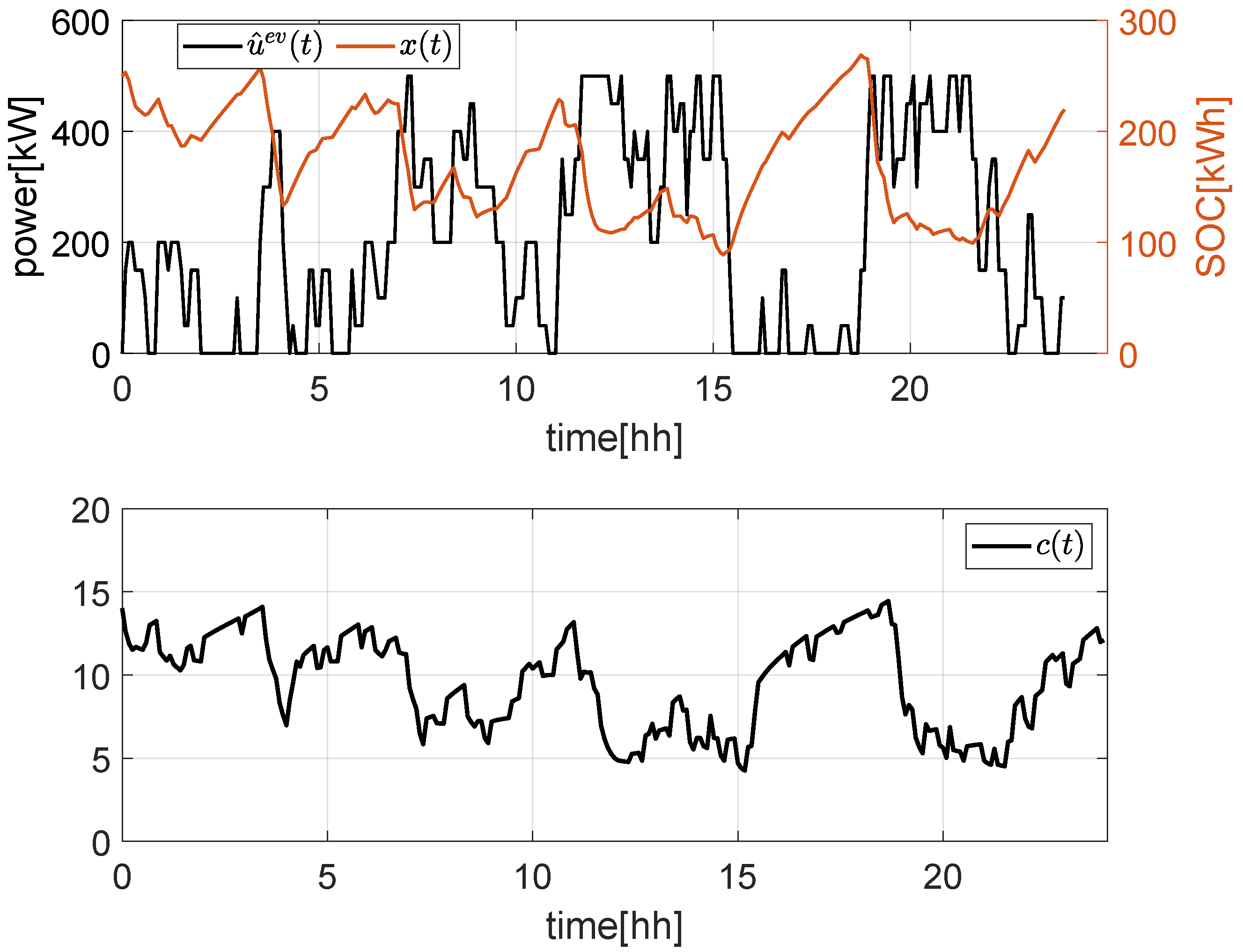
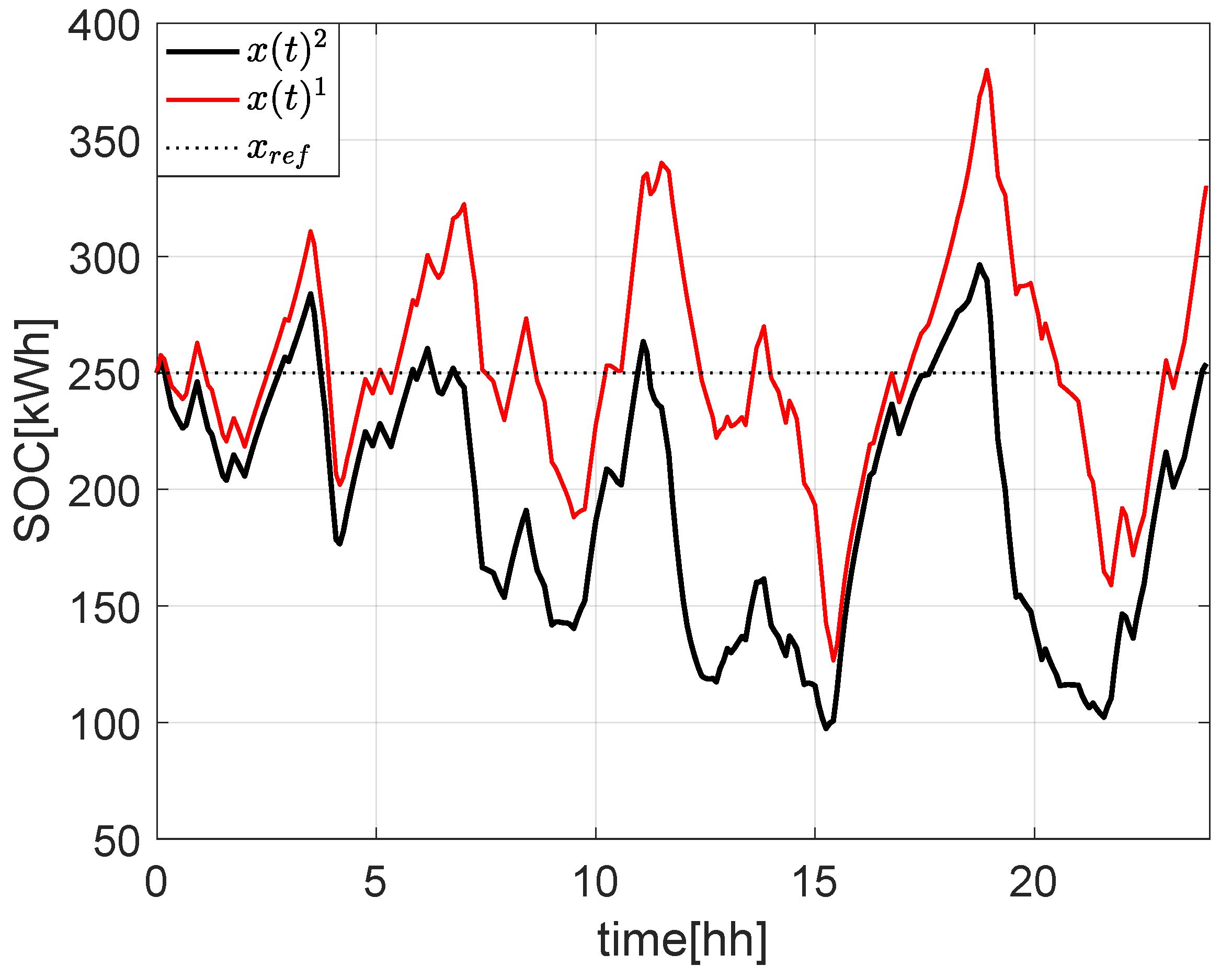
3.2. Simulation 1: Comparison between Fixed and Variable Weight for the Charging Power Tracking Term
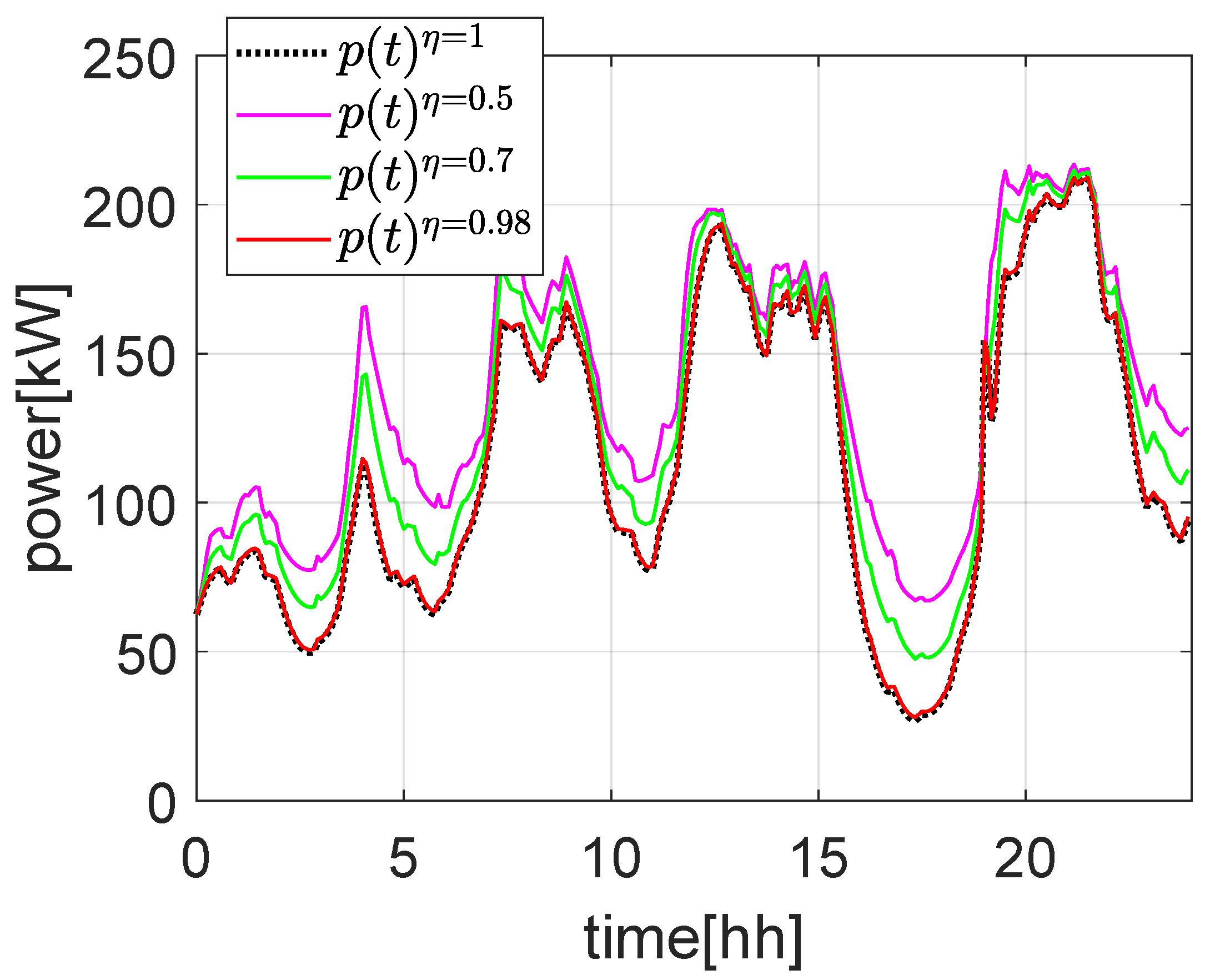
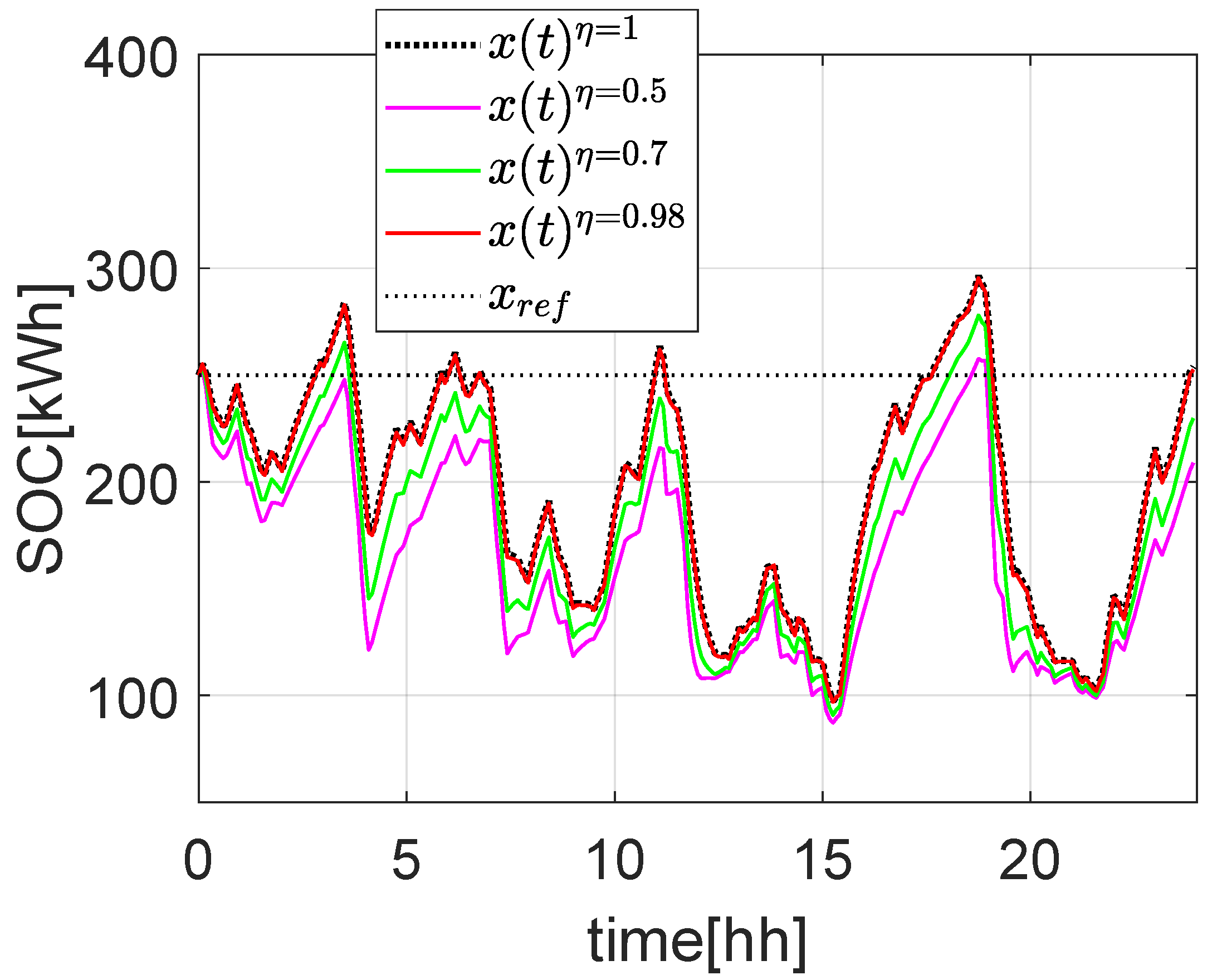
3.3. Simulation 2: Effects of Power Losses
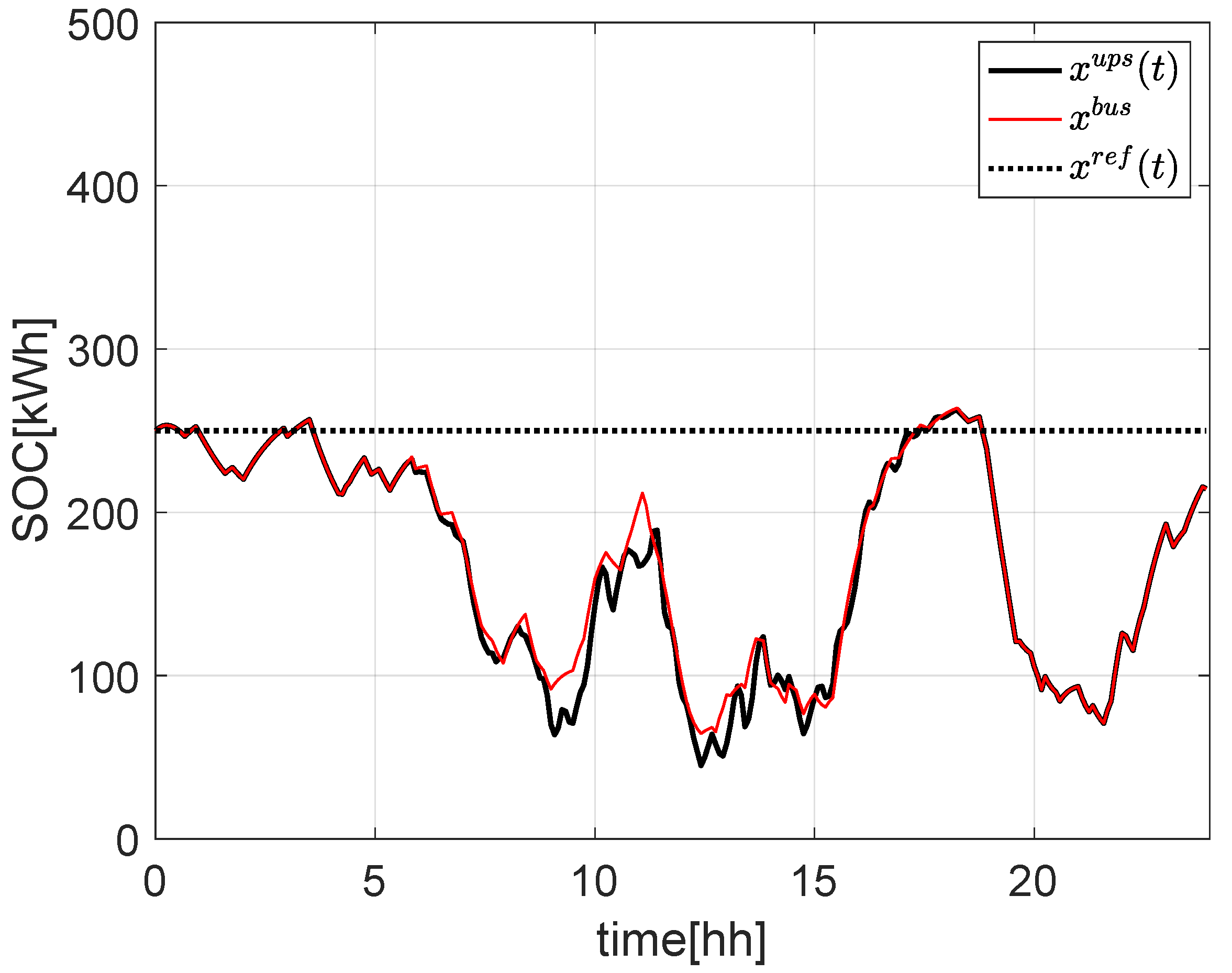
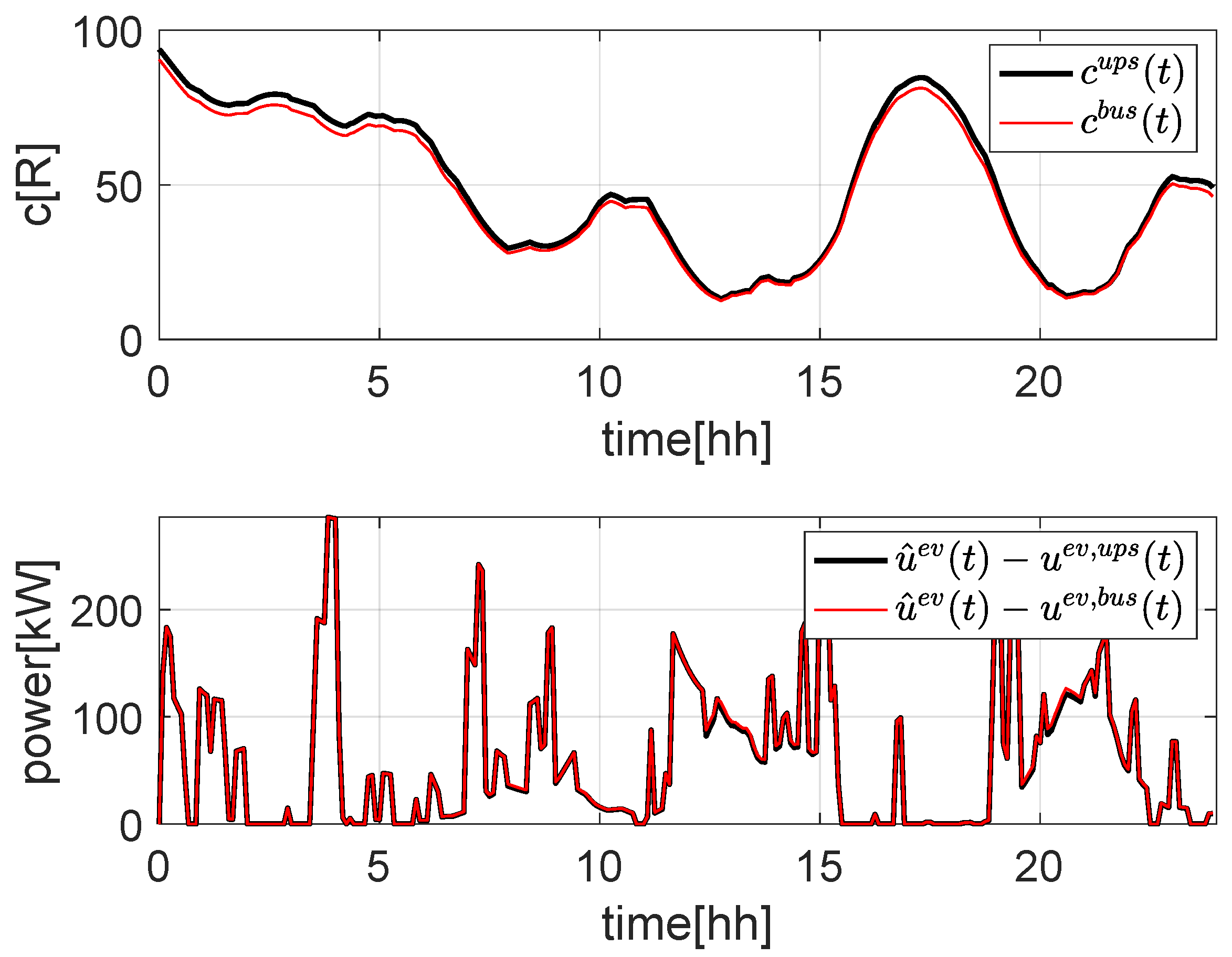
3.4. Simulation 3: Comparison between BUS and UPS Configuration in Case of Uncertainties
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ESS | Energy Storage System |
| MPC | Model Predictive Control |
| PEV | Plug-in Electric Vehicles |
| POC | Point of Connection |
| PMP | Pontryagin Minimum Principle |
| RES | Renewable Energy Sources |
| SOC | State-of-Charge |
References
- Szumska, E.M. Electric Vehicle Charging Infrastructure along Highways in the EU. Energies 2023, 16, 895. [Google Scholar] [CrossRef]
- Negarestani, S.; Fotuhi-Firuzabad, M.; Rastegar, M.; Rajabi-Ghahnavieh, A. Optimal sizing of storage system in a fast charging station for plug-in hybrid electric vehicles. IEEE Trans. Transp. Electrif. 2016, 2, 443–453. [Google Scholar] [CrossRef]
- Kim, N.; Cha, S.; Peng, H. Optimal control of hybrid electric vehicles based on Pontryagin’s minimum principle. IEEE Trans. Control Syst. Technol. 2010, 19, 1279–1287. [Google Scholar]
- Heymann, B.; Bonnans, J.F.; Martinon, P.; Silva, F.J.; Lanas, F.; Jiménez-Estévez, G. Continuous optimal control approaches to microgrid energy management. Energy Syst. 2018, 9, 59–77. [Google Scholar] [CrossRef] [Green Version]
- Zheng, C.; Li, W.; Liang, Q. An energy management strategy of hybrid energy storage systems for electric vehicle applications. IEEE Trans. Sustain. Energy 2018, 9, 1880–1888. [Google Scholar] [CrossRef]
- Kou, P.; Feng, Y.; Liang, D.; Gao, L. A model predictive control approach for matching uncertain wind generation with PEV charging demand in a microgrid. Int. J. Electr. Power Energy Syst. 2019, 105, 488–499. [Google Scholar] [CrossRef]
- Kou, P.; Liang, D.; Gao, L.; Gao, F. Stochastic coordination of plug-in electric vehicles and wind turbines in microgrid: A model predictive control approach. IEEE Trans. Smart Grid 2015, 7, 1537–1551. [Google Scholar] [CrossRef]
- Liberati, F.; Di Giorgio, A.; Koch, G. Optimal stochastic control of energy storage system based on pontryagin minimum principle for flattening pev fast charging in a service area. IEEE Control Syst. Lett. 2021, 6, 247–252. [Google Scholar] [CrossRef]
- Giorgio, A.D.; Atanasious, M.M.H.; Guetta, S.; Liberati, F. Control of an Energy Storage System for Electric Vehicle Fast Charging: Impact of Configuration Choices and Demand Uncertainty. In Proceedings of the 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC / I&CPS Europe), Bari, Italy, 7–10 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Ding, X.; Zhang, W.; Wei, S.; Wang, Z. Optimization of an energy storage system for electric bus fast-charging station. Energies 2021, 14, 4143. [Google Scholar] [CrossRef]
- Sun, B. A multi-objective optimization model for fast electric vehicle charging stations with wind, PV power and energy storage. J. Clean. Prod. 2021, 288, 125564. [Google Scholar] [CrossRef]
- Leonori, S.; Rizzoni, G.; Mascioli, F.M.F.; Rizzi, A. Intelligent energy flow management of a nanogrid fast charging station equipped with second life batteries. Int. J. Electr. Power Energy Syst. 2021, 127, 106602. [Google Scholar] [CrossRef]
- Kucevic, D.; Englberger, S.; Sharma, A.; Trivedi, A.; Tepe, B.; Schachler, B.; Hesse, H.; Srinivasan, D.; Jossen, A. Reducing grid peak load through the coordinated control of battery energy storage systems located at electric vehicle charging parks. Appl. Energy 2021, 295, 116936. [Google Scholar] [CrossRef]
- Huang, Y.; Yona, A.; Takahashi, H.; Hemeida, A.M.; Mandal, P.; Mikhaylov, A.; Senjyu, T.; Lotfy, M.E. Energy management system optimization of drug store electric vehicles charging station operation. Sustainability 2021, 13, 6163. [Google Scholar] [CrossRef]
- Chen, X.; Pang, Z.; Zhang, M.; Jiang, S.; Feng, J.; Shen, B. Techno-economic study of a 100-MW-class multi-energy vehicle charging/refueling station: Using 100% renewable, liquid hydrogen, and superconductor technologies. Energy Convers. Manag. 2023, 276, 116463. [Google Scholar] [CrossRef]
- Parlikar, A.; Schott, M.; Godse, K.; Kucevic, D.; Jossen, A.; Hesse, H. High-power electric vehicle charging: Low-carbon grid integration pathways with stationary lithium-ion battery systems and renewable generation. Appl. Energy 2023, 333, 120541. [Google Scholar] [CrossRef]
- Kumar, N.; Kumar, T.; Nema, S.; Thakur, T. A comprehensive planning framework for electric vehicles fast charging station assisted by solar and battery based on Queueing theory and non-dominated sorting genetic algorithm-II in a co-ordinated transportation and power network. J. Energy Storage 2022, 49, 104180. [Google Scholar] [CrossRef]
- Tan, H.; Chen, D.; Jing, Z. Optimal Sizing of Energy Storage System at Fast Charging Stations under Electricity Market Environment. In Proceedings of the 2019 IEEE 2nd International Conference on Power and Energy Applications (ICPEA), Singapore, 27–30 April 2019. [Google Scholar] [CrossRef]
- Comitato Elettrotecnico Italiano. CEI-016-Reference Technical Rules for the Connection of Active and Passive Consumers to the HV and MV Electrical Networks of Distribution Company, v1. 2020. Available online: https://www.ceinorme.it/doc/norme/016021_2019/0-16_2019.pdf (accessed on 28 December 2022).
- Comitato Elettrotecnico Italiano. CEI-021-Reference Technical Rules for the Connection of Active and Passive Users to the LV Electrical Utilities, v1. 2020. Available online: https://www.ceinorme.it/doc/norme/18309.pdf (accessed on 28 December 2022).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explanation |
|---|---|
| g | Constant used to define weight c in (15). |
| h | Constant used to define weight c in (15). |
| Constant used to define weight c in (15). | |
| N | Length [number of sampling intervals] of the MPC prediction horizon. |
| Power [kW] flowing at the POC during time interval t. | |
| Maximum power [kW] of a high-power charging station. | |
| q | Weight of the state term in the objective function. |
| r | Weight of the power term in the objective function. |
| s | Weight of the control term in the objective function. |
| t | Generic time interval. |
| Initial time interval. | |
| T | Sampling time. |
| ESS charging/discharging power [kW] during interval t. | |
| Maximum ESS charging power [kW]. | |
| Maximum ESS discharging power [kW]. | |
| Total power [kW] delivered to the PEVs during interval t. | |
| Total power [kW] demand from the PEVs during interval t. | |
| Maximum aggregated power demand [kW] for charging stations. | |
| RES power [kW] produced during interval t. | |
| ESS SOC [kWh] at the beginning of time interval t. | |
| ESS initial SOC [kWh]. | |
| respectively, minimum and maximum possible ESS SOC [kWh]. | |
| Reference ESS SOC [kWh]. | |
| Boolean variable equal to one if the ESS recharges during time interval t. | |
| Boolean variable equal to one if the ESS discharges during time interval t. | |
| The ESS charging and discharging conversion losses, respectively. | |
| Total power [kW] entering or exiting the ESS at time t in the UPS configuration. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Giorgio, A.; De Santis, E.; Frettoni, L.; Felli, S.; Liberati, F. Electric Vehicle Fast Charging: A Congestion-Dependent Stochastic Model Predictive Control under Uncertain Reference. Energies 2023, 16, 1348. https://doi.org/10.3390/en16031348
Di Giorgio A, De Santis E, Frettoni L, Felli S, Liberati F. Electric Vehicle Fast Charging: A Congestion-Dependent Stochastic Model Predictive Control under Uncertain Reference. Energies. 2023; 16(3):1348. https://doi.org/10.3390/en16031348
Chicago/Turabian StyleDi Giorgio, Alessandro, Emanuele De Santis, Lucia Frettoni, Stefano Felli, and Francesco Liberati. 2023. "Electric Vehicle Fast Charging: A Congestion-Dependent Stochastic Model Predictive Control under Uncertain Reference" Energies 16, no. 3: 1348. https://doi.org/10.3390/en16031348