

Parameter Estimation of a Grid-Tied Inverter Using In Situ Pseudo-Random Perturbation Sources

Abstract
:1. Introduction
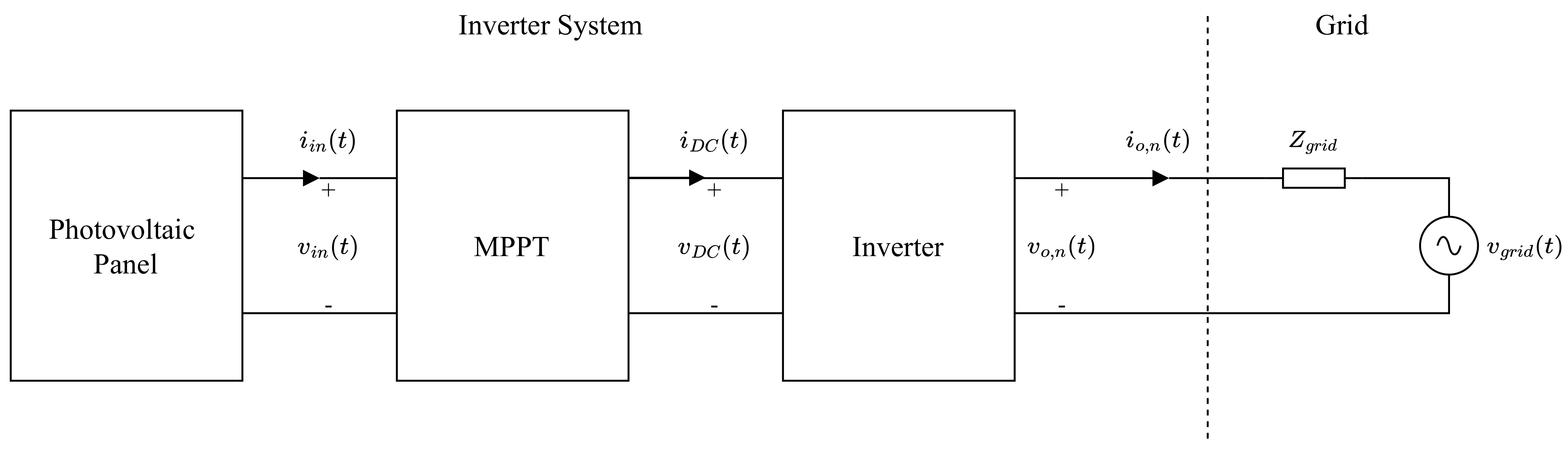
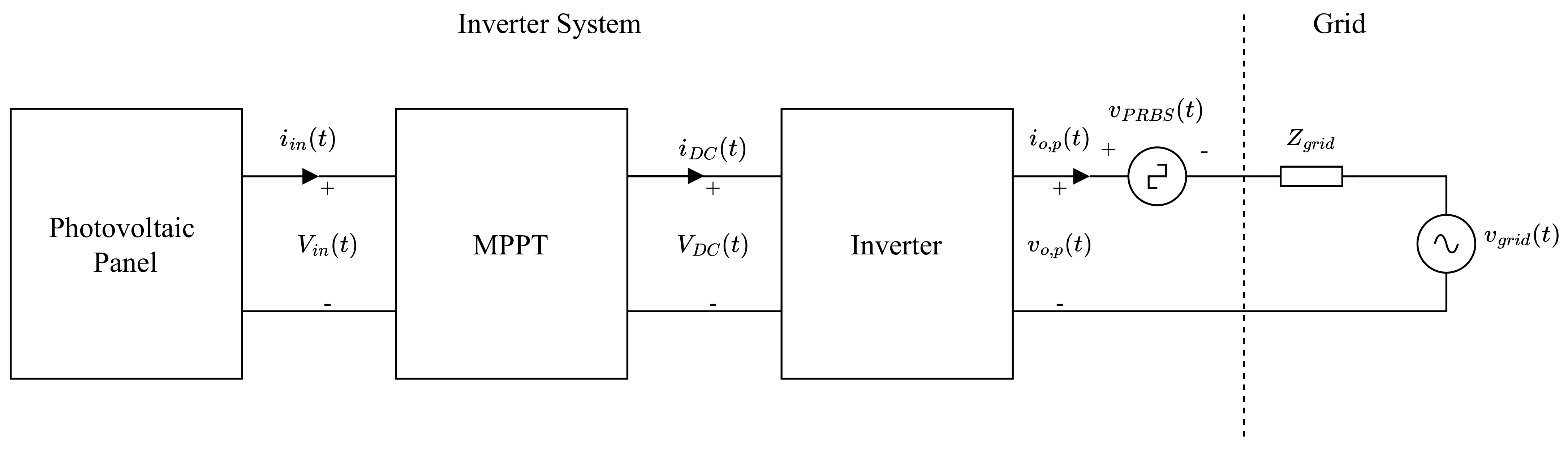
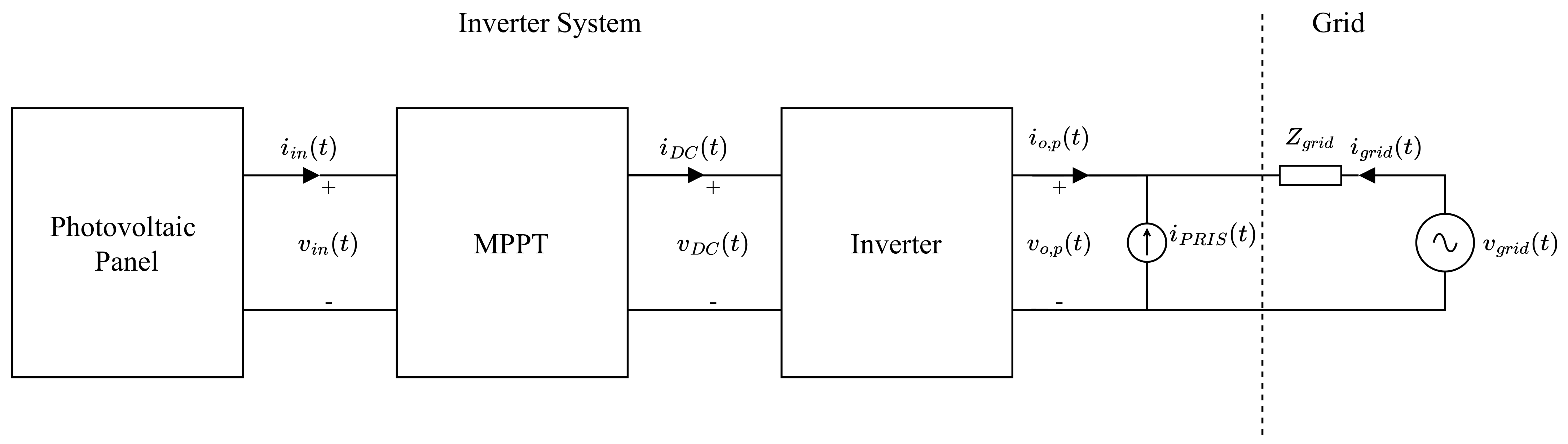
2. Grid-Tied Inverter
2.1. Inverter Topology
2.2. Mathematical Analysis of Inverter
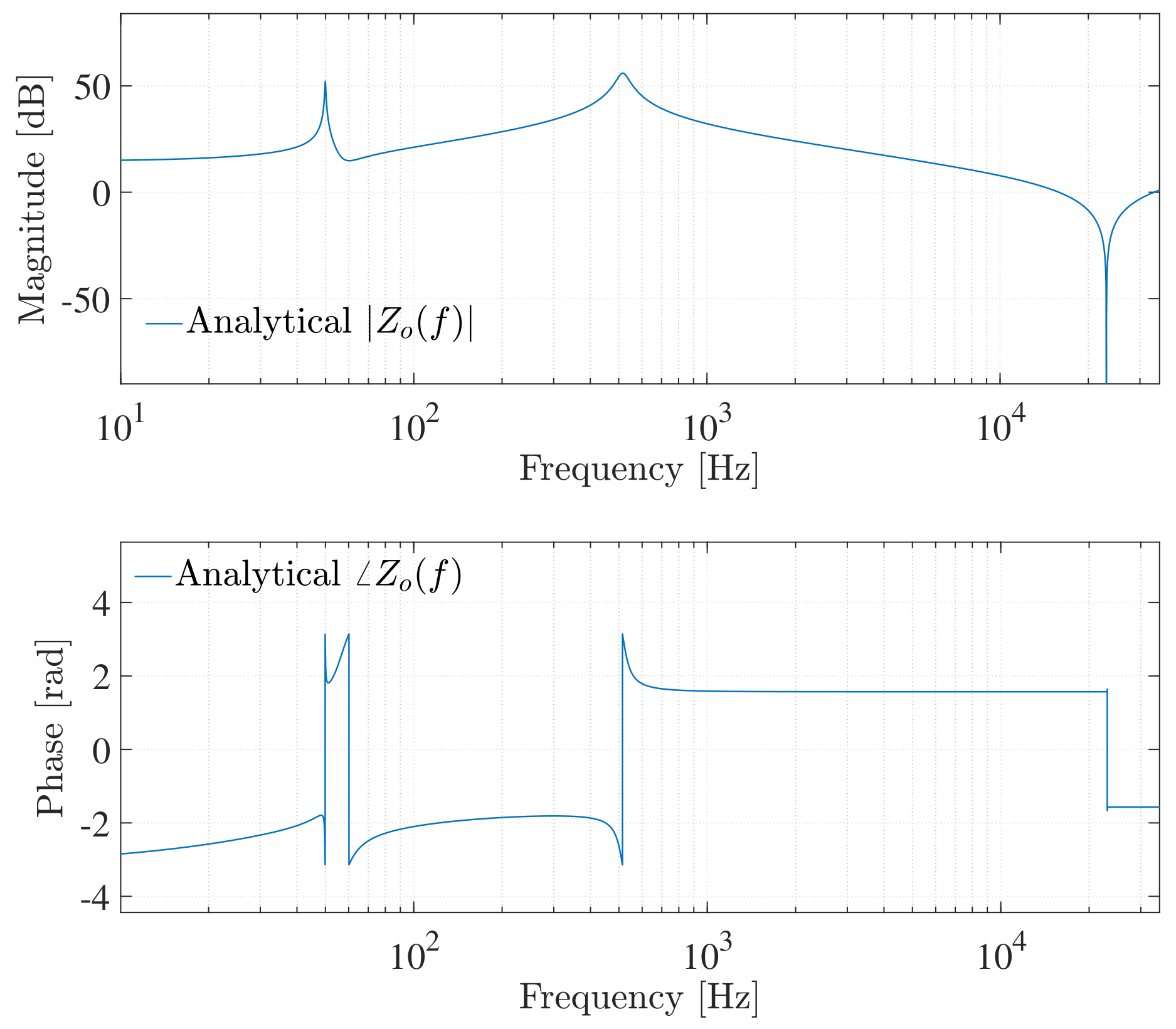
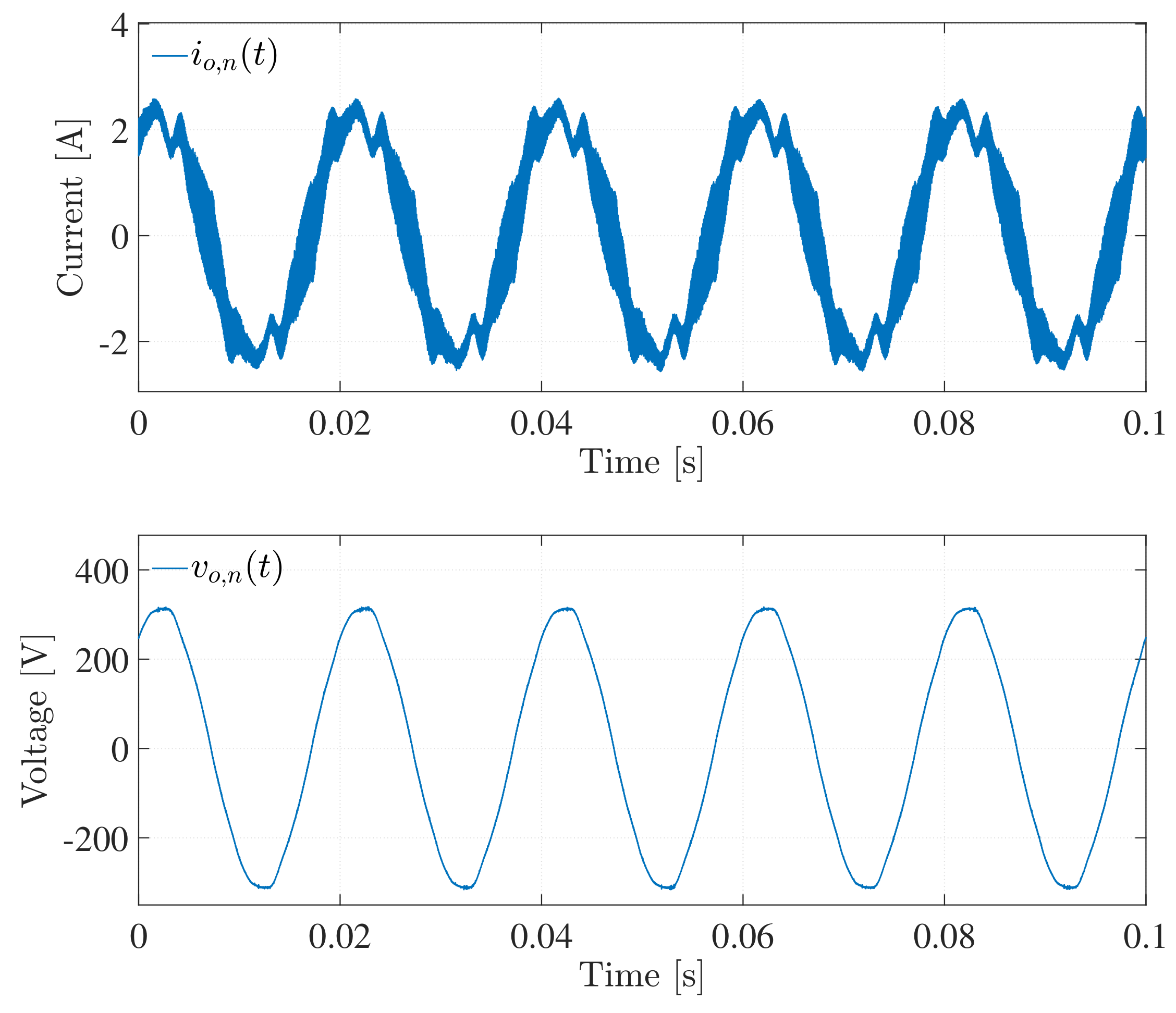
3. Simulated Small-Signal Analysis of Inverter
4. Parameter Estimation
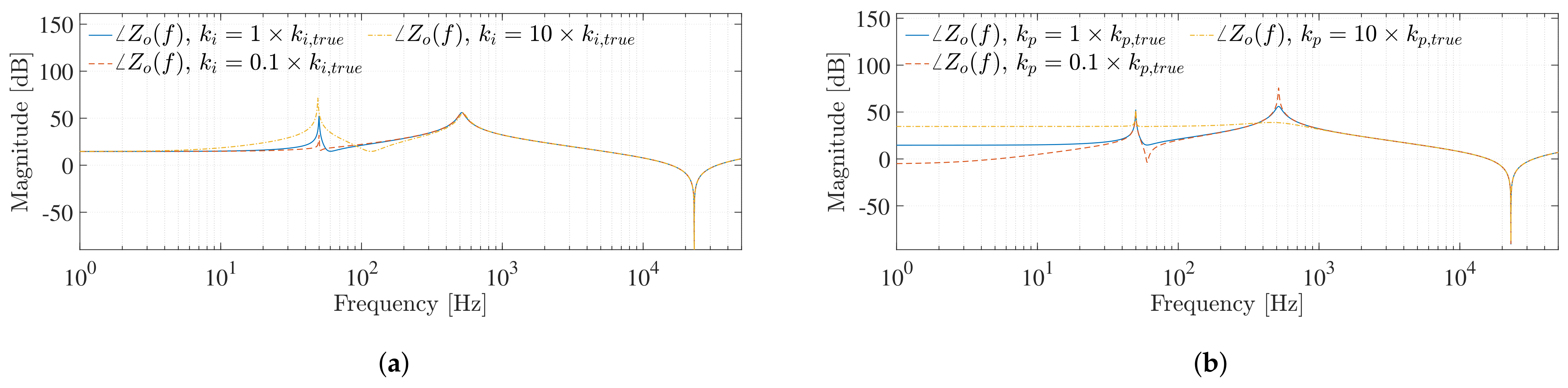
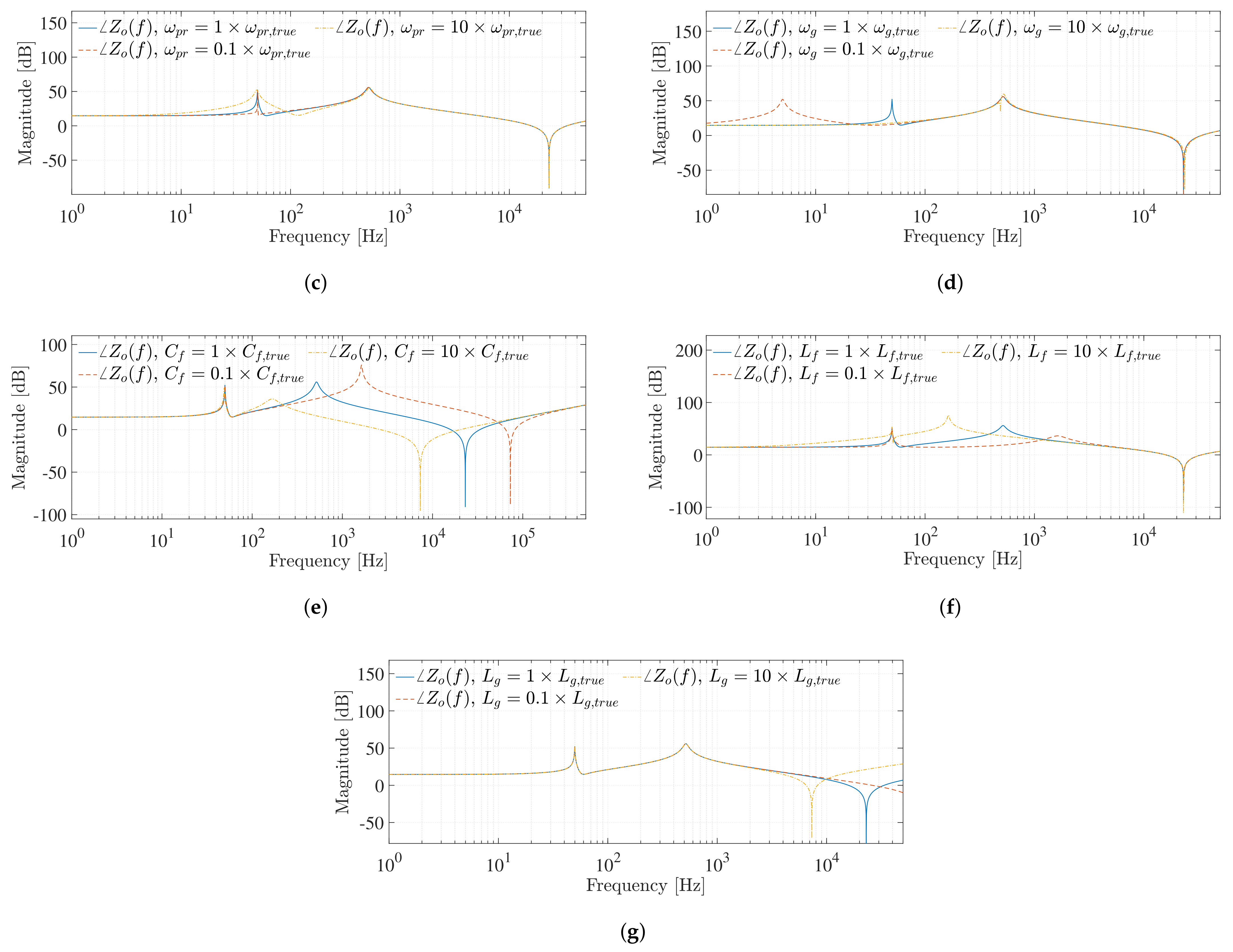
4.1. Frequency-Domain Sensitivity Analysis of Filter and Controller Parameters
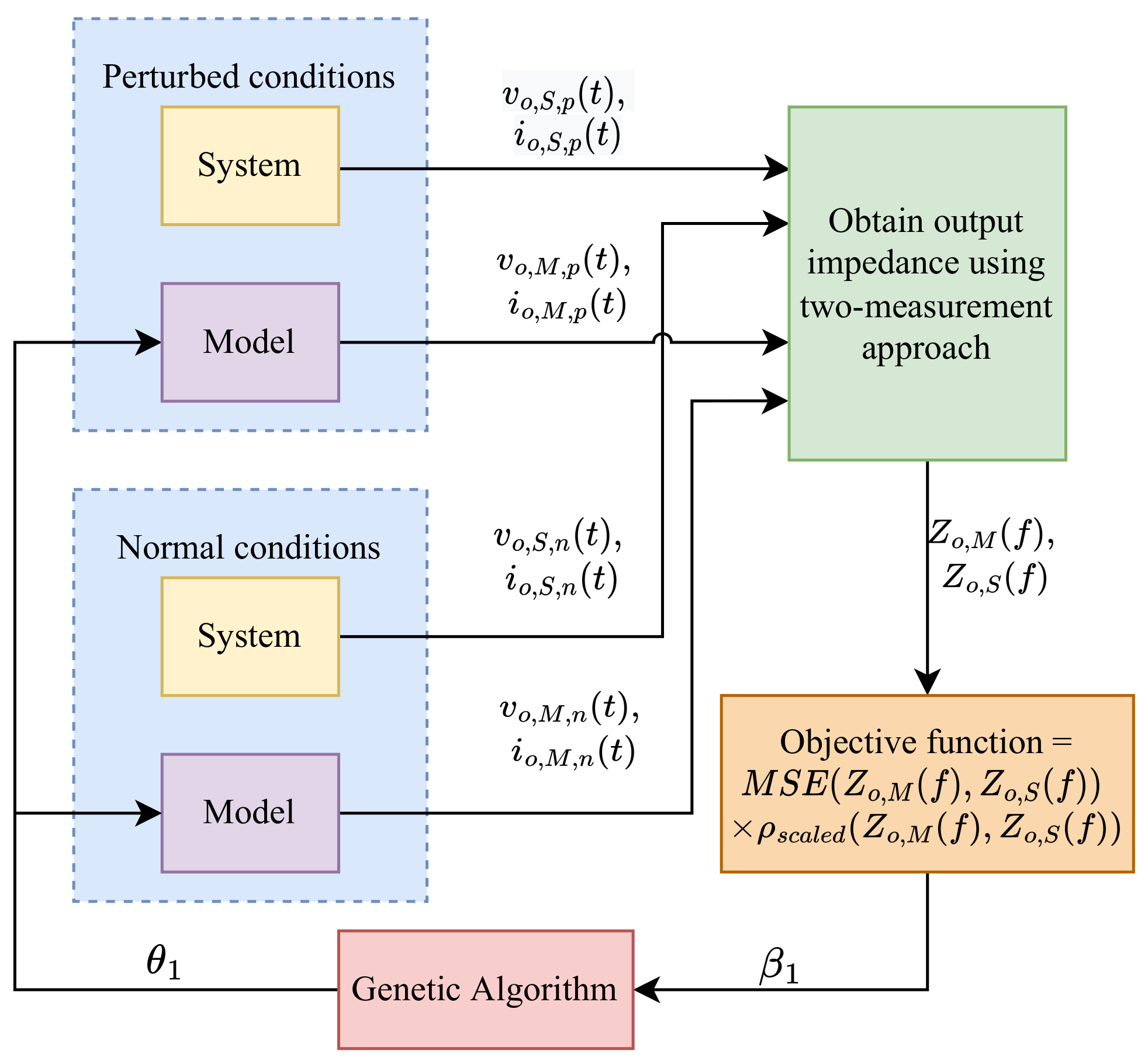
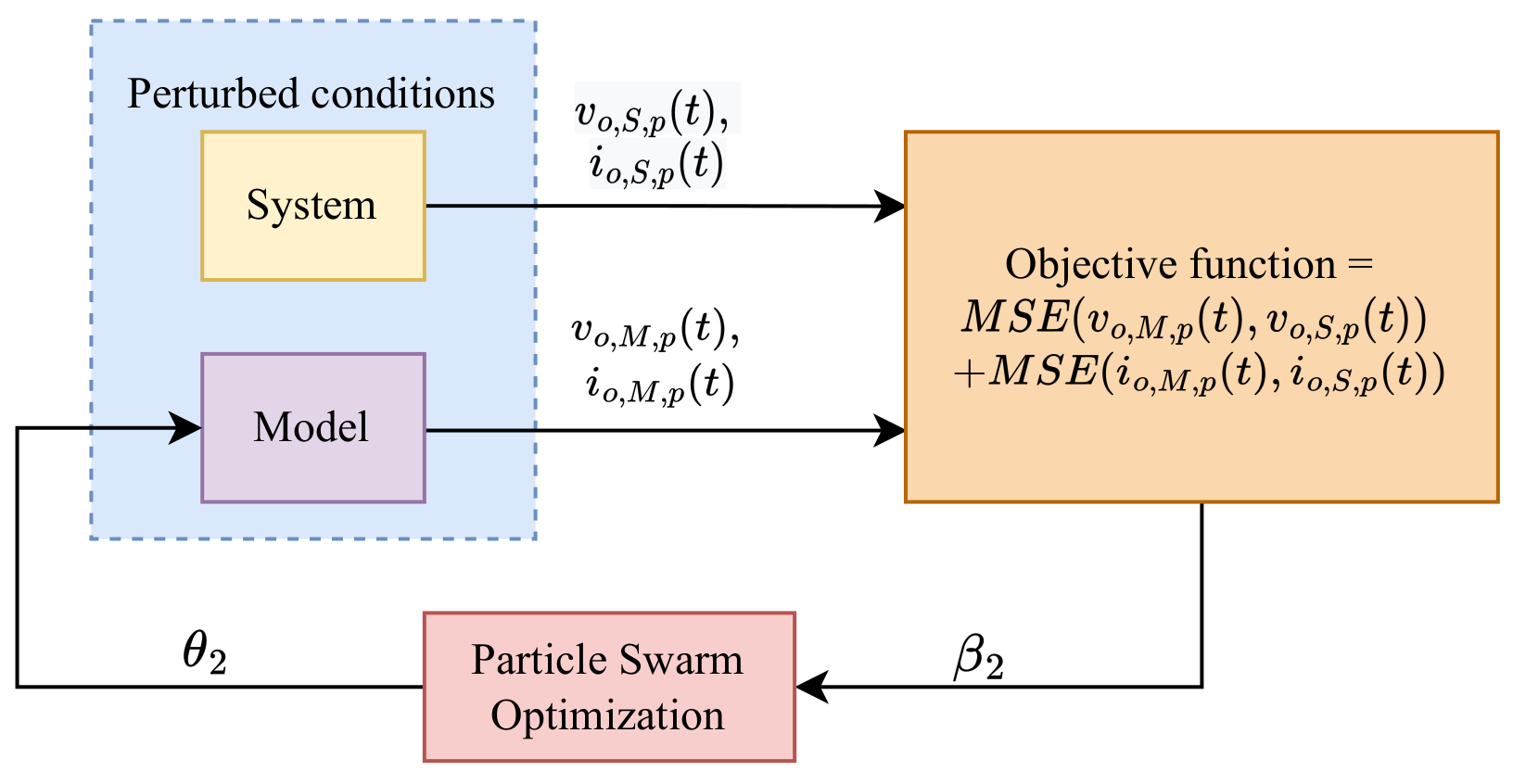
4.2. Parameter Estimation Methodology
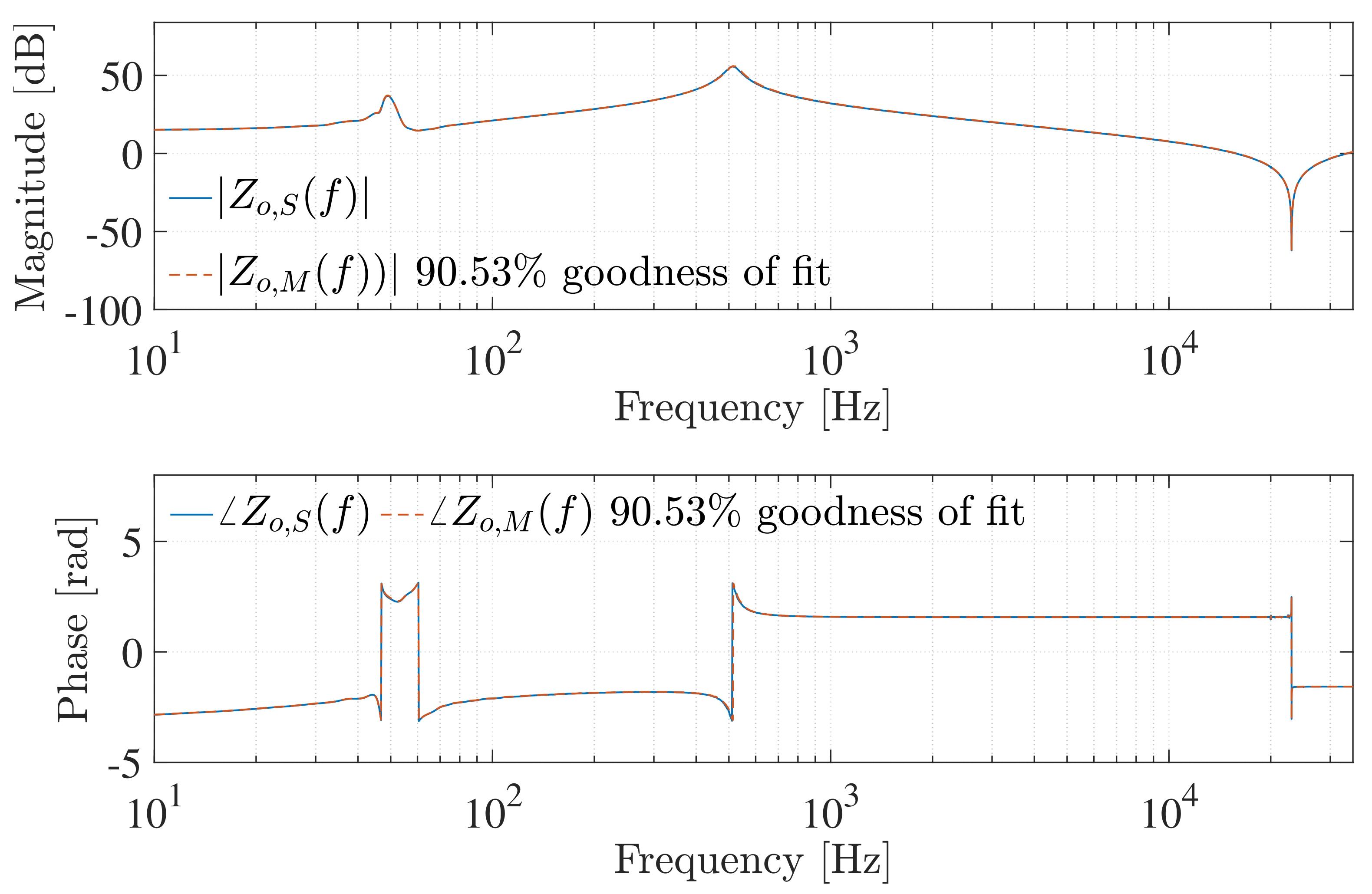
4.3. Parameter Estimation Results
5. Experimental Comparison of Pseudo-Random Perturbation
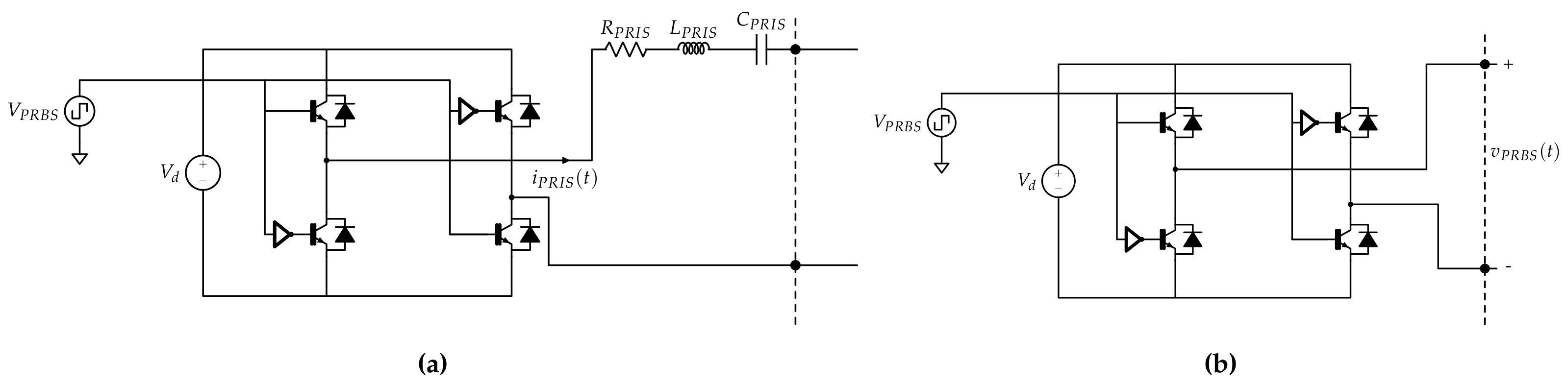
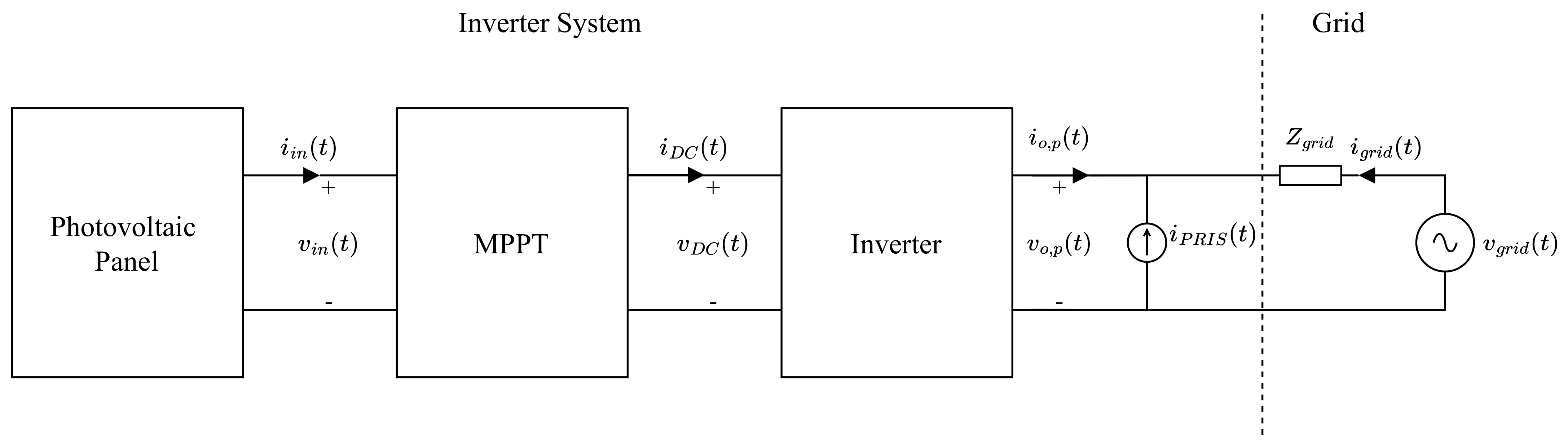
5.1. Pseudo-Random Perturbation Sources
5.2. Description of the Practical Inverter under Investigation
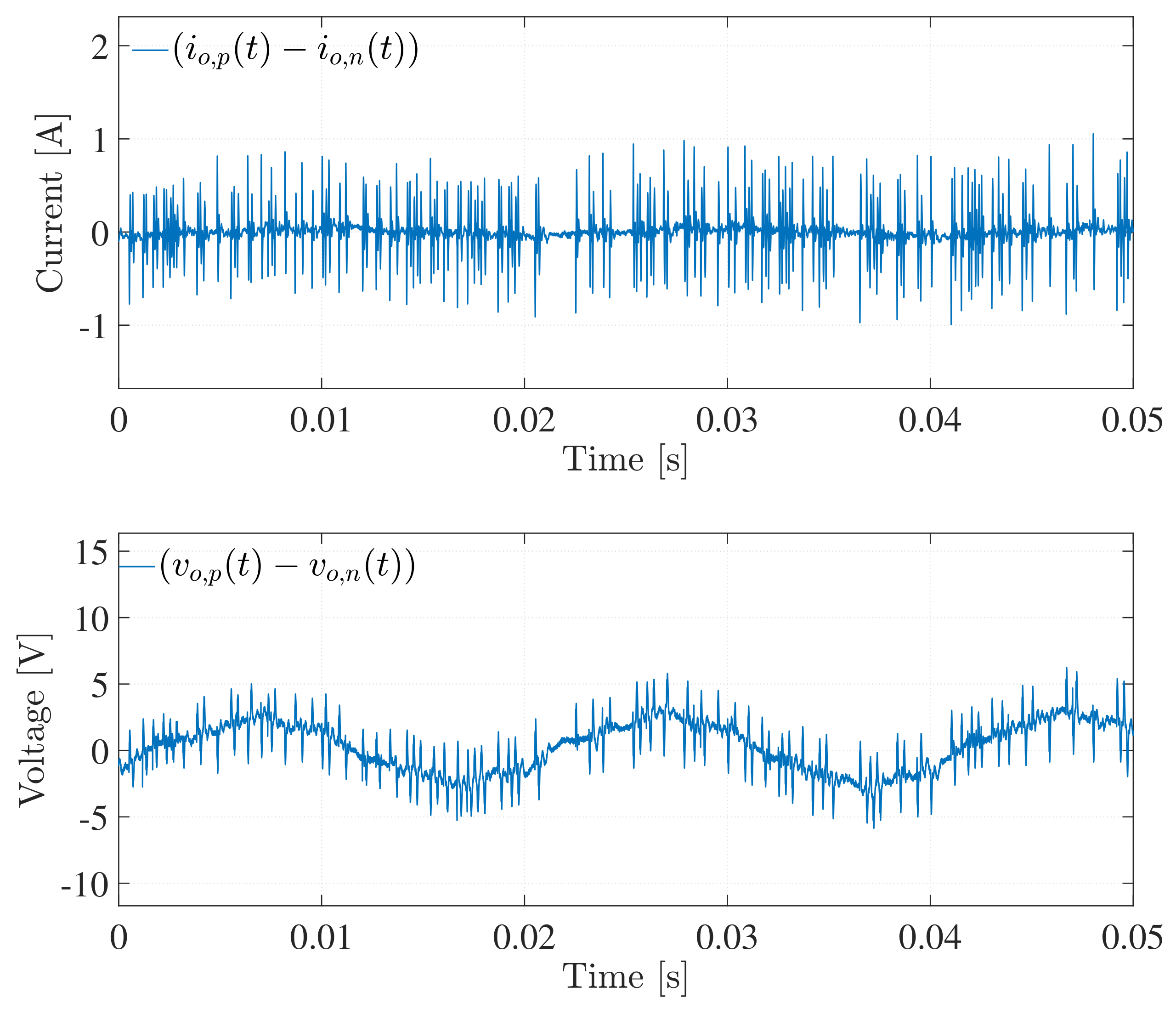
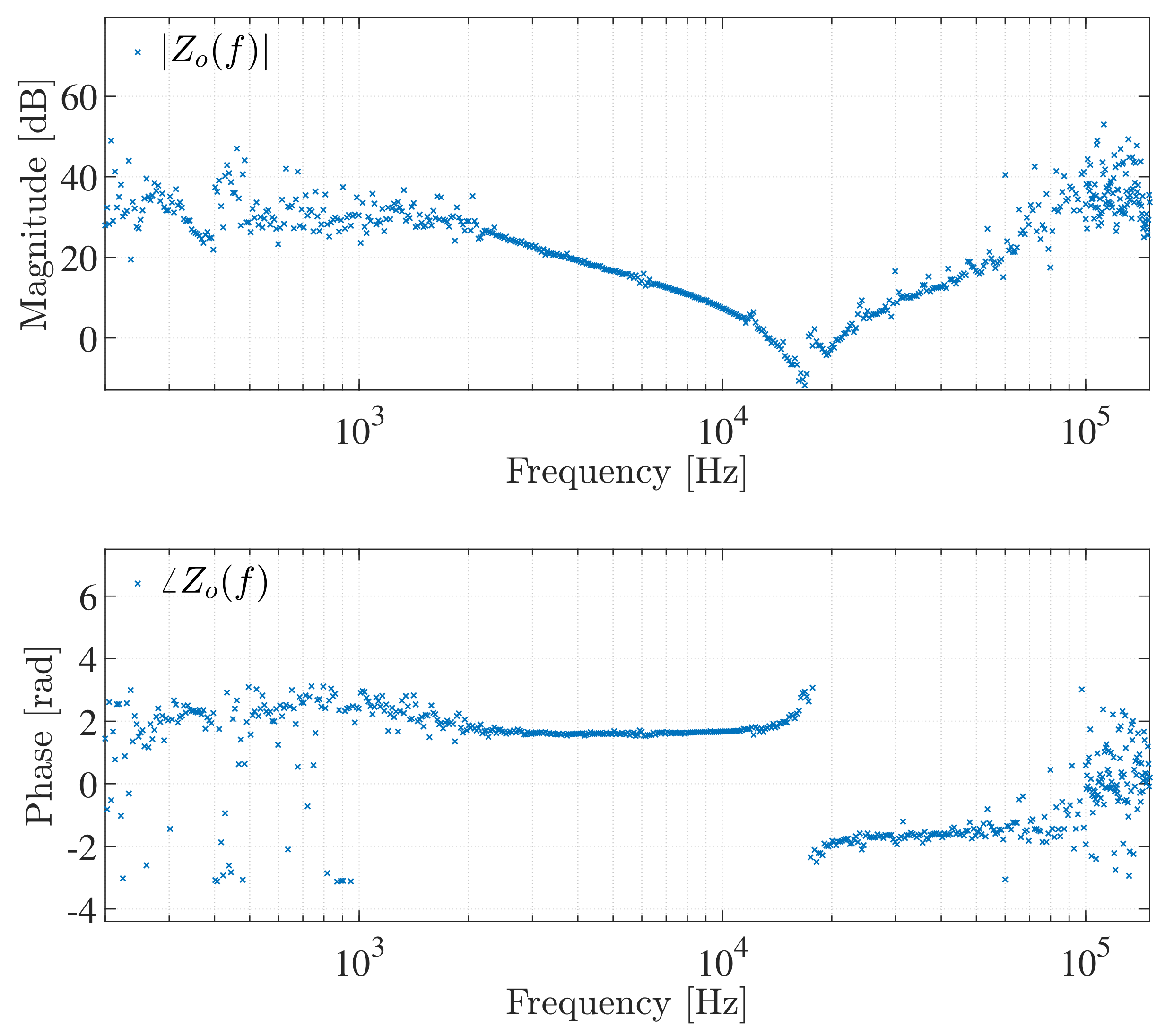
5.3. PRIS Perturbation
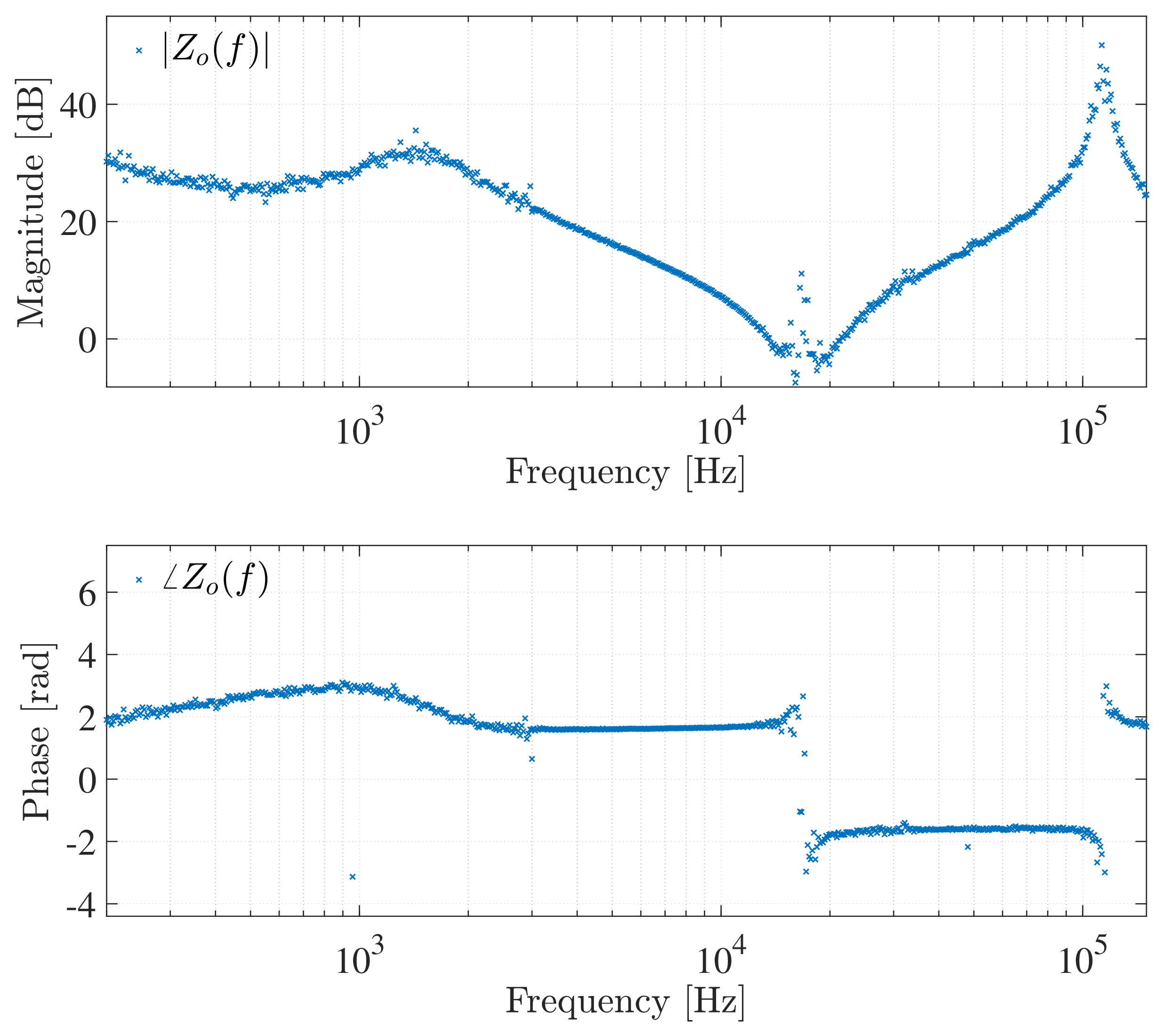
5.4. PRBS Perturbation
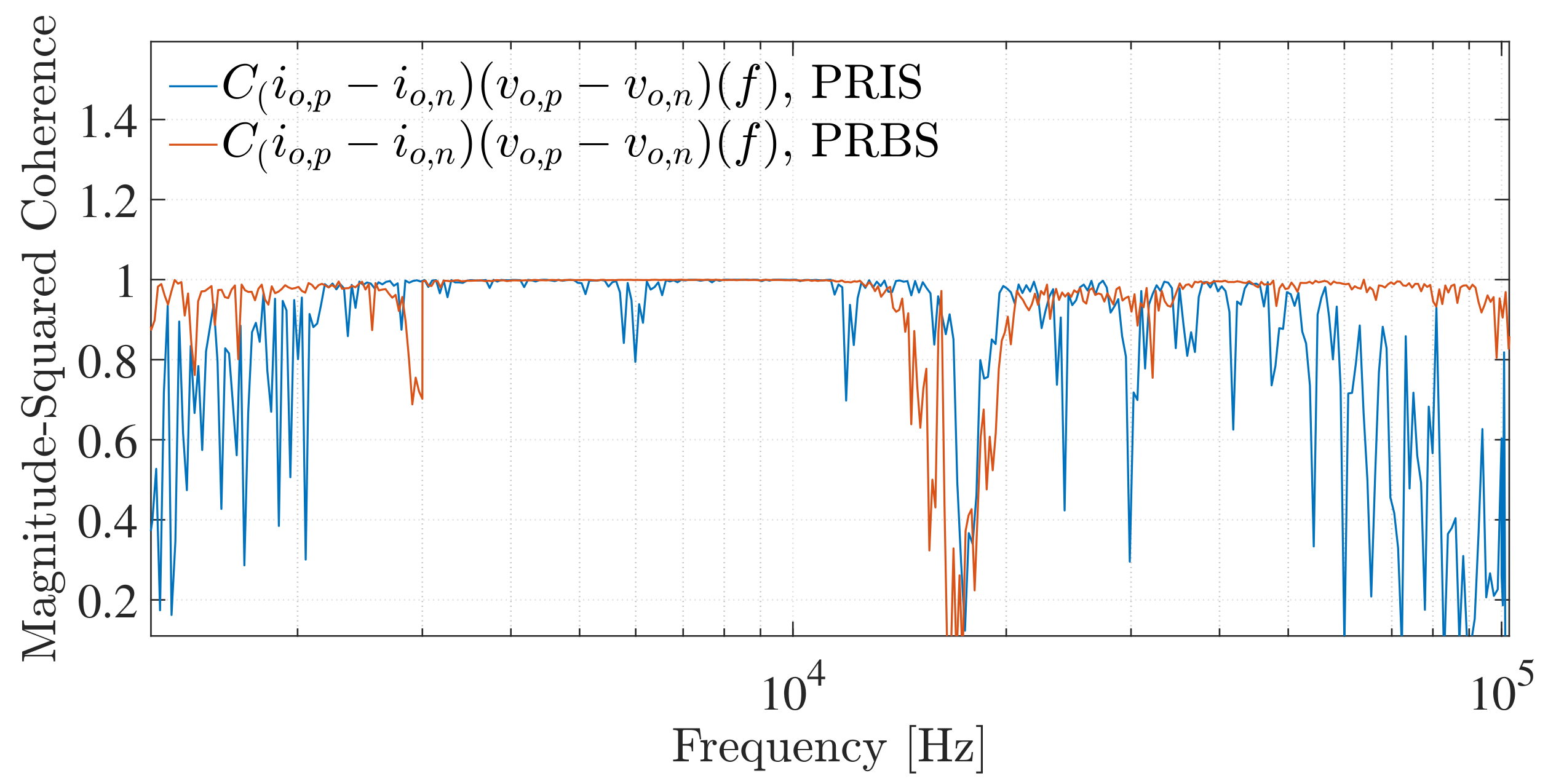
5.5. Critical Comparison of Pseudo-Random Perturbation Strategies
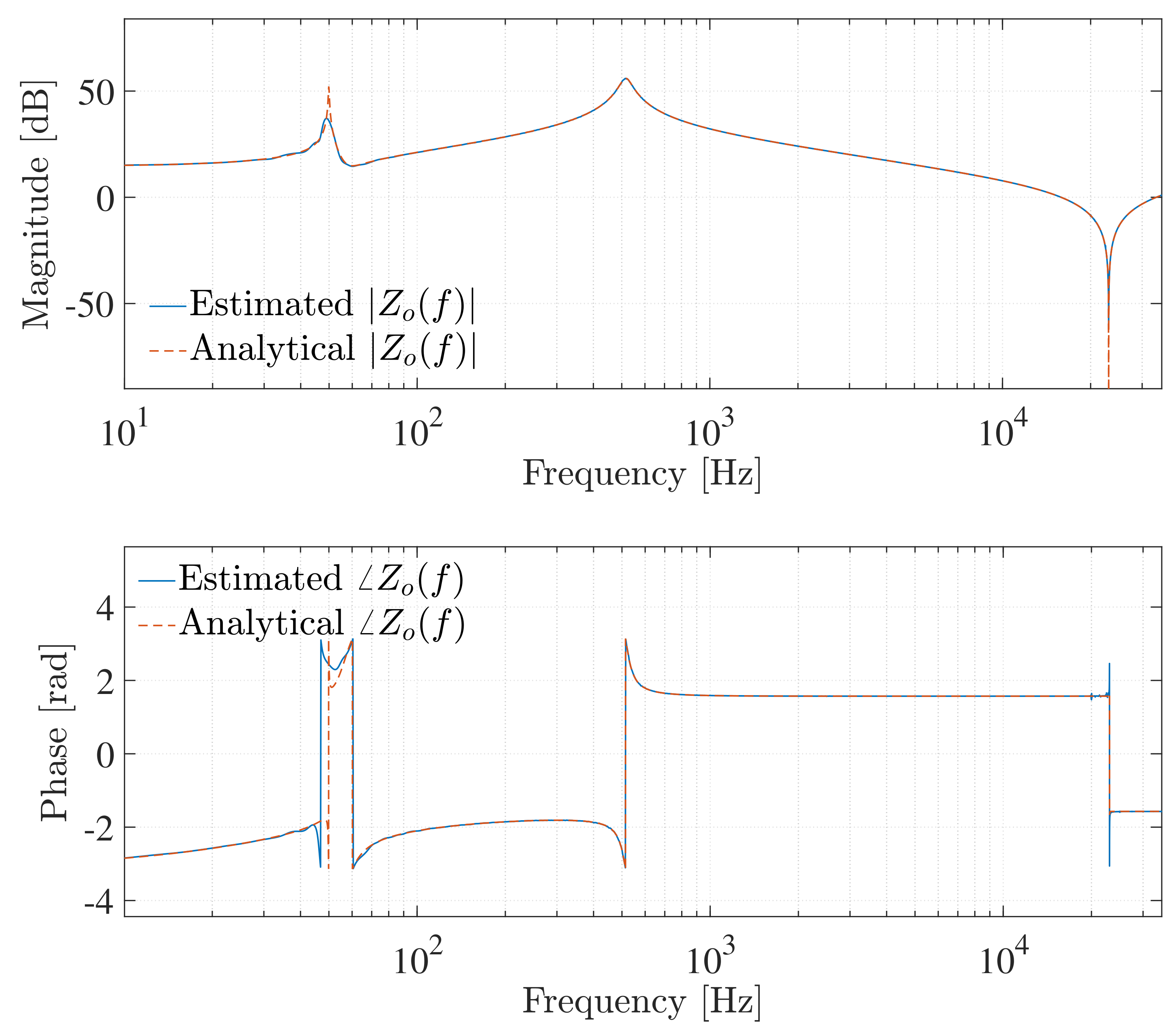
5.6. Estimation of an Analytical Transfer Function of the Inverter Output Impedance from Measurement Data
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rehmani, M.H.; Reisslein, M.; Rachedi, A.; Erol-Kantarci, M.; Radenkovic, M. Integrating Renewable Energy Resources Into the Smart Grid: Recent Developments in Information and Communication Technologies. IEEE Trans. Industr. Inform. 2018, 14, 2814–2825. [Google Scholar] [CrossRef]
- Tahir, M.; El Shatshat, R.A.; Salama, M. Reactive Power Dispatch of Inverter-Based Renewable Distributed Generation for Optimal Feeder Operation. In Proceedings of the 2018 IEEE Electrical Power and Energy Conference (EPEC), Toronto, ON, Canada, 10–11 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Dileep, D.K.; Bharath, K. A Brief Study of Solar Home Inverters. In Proceedings of the 2018 International Conference on Control, Power, Communication and Computing Technologies (ICCPCCT), Kannur, India, 23–24 March 2018; pp. 334–339. [Google Scholar] [CrossRef]
- Burkart, R.; Kolar, J.W.; Griepentrog, G. Comprehensive comparative evaluation of single- and multi-stage three-phase power converters for photovoltaic applications. In Proceedings of the International Conference on Telecommunications Energy (INTELEC) 2012, Bengaluru, India, 16–19 December 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Chowdhury, A.S.K.; Razzak, M.A. Single phase grid-connected photovoltaic inverter for residential application with maximum power point tracking. In Proceedings of the 2013 International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 17–18 May 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, Y.; Ma, R.; Blaabjerg, F. Zero-Voltage Ride-Through Capability of Single-Phase Grid-Connected Photovoltaic Systems. Appl. Sci. 2017, 7, 315. [Google Scholar] [CrossRef]
- Ashtiani, N.A.; Ali Khajehoddin, S.; Karimi-Ghartemani, M. Optimal Design of Nested Current and Voltage Loops in Grid-Connected Inverters. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 2397–2402. [Google Scholar] [CrossRef]
- Operator, S. Grid Connection Code for Renewable Power Plants Connected to the Electricity Transmission System or the Distribution System in South Africa; Technical Report; Eskom Transmission Division: Germiston, Johannesburg, South Africa, 2020. [Google Scholar]
- Rathnayake, H.; Solatialkaran, D.; Zare, F.; Sharma, R. Grid-tied Inverters in Renewable Energy Systems: Harmonic Emission in 2 to 9 kHz Frequency Range. In Proceedings of the 2019 21st European Conference on Power Electronics and Applications (EPE ’19 ECCE Europe), Genova, Italy, 2–6 September 2019; pp. P.1–P.10. [Google Scholar] [CrossRef]
- Yaghoobi, J.; Zare, F.; Solatialkaran, D. Harmonic Emissions in 0–9 kHz Frequency Range and Transient Effects in Grid-Connected Inverters Utilised in Solar Farms. In Proceedings of the 2020 19th International Conference on Harmonics and Quality of Power (ICHQP), Dubai, United Arab Emirates, 6–7 July 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Busatto, T.; Ravidran, V.; Larsson, A.; Rönnberg, S.K.; Bollen, M.H.J.; Meyer, J. Experimental Harmonic Analysis of the Impact of LED Lamps on PV Inverters Performance. In Proceedings of the 2019 Electric Power Quality and Supply Reliability Conference (PQ) & 2019 Symposium on Electrical Engineering and Mechatronics (SEEM), Kärdla, Estonia, 12–15 June 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Langella, R.; Testa, A.; Meyer, J.; Möller, F.; Stiegler, R.; Djokic, S.Z. Experimental-Based Evaluation of PV Inverter Harmonic and Interharmonic Distortion Due to Different Operating Conditions. IEEE Trans. Instrum. Meas. 2016, 65, 2221–2233. [Google Scholar] [CrossRef] [Green Version]
- Park, J.y.; Nam, S.r.; Park, J.k. Control of a ULTC Considering the Dispatch Schedule of Capacitors in a Distribution System. IEEE Trans. Power Syst. 2007, 22, 755–761. [Google Scholar] [CrossRef]
- Oue, K.; Sano, S.; Kato, T.; Inoue, K. Stability Analysis of Grid-Forming Inverter in DQ Frequency Domain. In Proceedings of the 2019 20th Workshop on Control and Modeling for Power Electronics (COMPEL), Toronto, ON, Canada, 17–20 June 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Kato, T.; Inoue, K.; Kawabata, H. Stability analysis of a grid-connected inverter system. In Proceedings of the 2012 IEEE 13th Workshop on Control and Modeling for Power Electronics (COMPEL), Kyoto, Japan, 10–13 June 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Monshizadeh, P.; De Persis, C.; Stegink, T.; Monshizadeh, N.; van der Schaft, A. Stability and frequency regulation of inverters with capacitive inertia. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 5696–5701. [Google Scholar] [CrossRef] [Green Version]
- Rasheduzzaman, M.; Mueller, J.; Kimball, J. An Accurate Small-Signal Model of Inverter- Dominated Islanded Microgrids Using Reference Frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1. [Google Scholar] [CrossRef]
- Ebrahimi, M.; Khajehoddin, S.A.; Karimi-Ghartemani, M. Fast and Robust Single-Phase DQ Current Controller for Smart Inverter Applications. IEEE Trans. Power Electron. 2016, 31, 3968–3976. [Google Scholar] [CrossRef]
- Khalili Senobari, R.; Sadeh, J.; Borsi, H. Frequency response analysis (FRA) of transformers as a tool for fault detection and location: A review. Electr. Power Syst. Res. 2018, 155, 172–183. [Google Scholar] [CrossRef]
- Roinila, T.; Messo, T.; Luhtala, R.; Scharrenberg, R.; de Jong, E.C.W.; Fabian, A.; Sun, Y. Hardware-in-the-Loop Methods for Real-Time Frequency-Response Measurements of on-Board Power Distribution Systems. IEEE Trans. Ind. Electron. 2019, 66, 5769–5777. [Google Scholar] [CrossRef]
- Mwaniki, F.; Vermeulen, H. Characterization and Application of a Pseudo-Random Impulse Sequence for Parameter Estimation Applications. IEEE Trans. Instrum. Meas. 2019, 69, 3917–3927. [Google Scholar] [CrossRef]
- Kim, J.; Kim, H. Length of Pseudorandom Binary Sequence Required to Train Artificial Neural Network Without Overfitting. IEEE Access 2021, 9, 125358–125365. [Google Scholar] [CrossRef]
- Yan, L.; Bingham, C.; Cruz-Manzo, S.; Cui, D.; Lv, Y. Battery Impedance Measurement Using Pseudo Random Binary Sequences. In Proceedings of the 2020 IEEE 3rd Student Conference on Electrical Machines and Systems (SCEMS), Ji’nan, China, 4–6 December 2020; pp. 686–691. [Google Scholar] [CrossRef]
- Brozio, C. Modelling of Inverter-Based Generation for Power System Dynamic Studies. IET Gener. Transm. Distr. 2003, 150, 487–492. [Google Scholar] [CrossRef]
- Roinila, l.T.; Abdollahi, H.; Santi, E. Frequency-Domain Identification Based on Pseudorandom Sequences in Analysis and Control of DC Power Distribution Systems: A Review. IEEE Trans. Power Electron. 2021, 36, 3744–3756. [Google Scholar] [CrossRef]
- Vermeulen, H.; Strauss, J.; Shikoana, V. On-line estimation of synchronous generator parameters using PRBS perturbations. In Proceedings of the 2003 IEEE Power Engineering Society General Meeting (IEEE Cat. No.03CH37491), Toronto, ON, Canada, 13–17 July 2003; Volume 4, p. 2398. [Google Scholar] [CrossRef]
- Vermeulen, H.; Strauss, J. Off-line identification of an open-loop automatic voltage regulator using pseudo-random binary sequence perturbations. In Proceedings of the 1999 IEEE Africon. 5th Africon Conference in Africa (Cat. No.99CH36342), Cape Town, South Africa, 28 September–1 October 1999; Volume 2, pp. 799–802. [Google Scholar] [CrossRef]
- Mwaniki, F.M.; Vermeulen, H.J. Grid Impedance Frequency Response Measurements Using Pseudo-Random Impulse Sequence Perturbation. In Proceedings of the 2019 9th International Conference on Power and Energy Systems (ICPES), Perth, Australia, 10–12 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mwaniki, F.; Sayyid, A. Characterizing power transformer frequency responses using bipolar pseudo-random current impulses. Int. J. Power Electron. Drive Syst. 2021, 12, 2423. [Google Scholar] [CrossRef]
- Banks, D.M.; Cornelius Bekker, J.; Vermeulen, H.J. Parameter Estimation of a Two-Section Transformer Winding Model using Pseudo-Random Impulse Sequence Perturbation. In Proceedings of the 2021 56th International Universities Power Engineering Conference (UPEC), Middlesbrough, UK, 31 August–3 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Banks, D.M.; Bekker, J.C.; Vermeulen, H.J. Parameter Estimation of a Three-Section Winding Model using Intrinsic Mode Functions. In Proceedings of the 2022 IEEE International Conference on Environment and Electrical Engineering and 2022 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Prague, Czech Republic, 28 June–1 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Gerber, I.P.; Mwaniki, F.M.; Vermeulen, H.J. Parameter Estimation of a Ferro-Resonance Damping Circuit using Pseudo-Random Impulse Sequence Perturbations. In Proceedings of the 2021 56th International Universities Power Engineering Conference (UPEC), Middlesbrough, UK, 31 August–3 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Solomon, A.; Mwaniki, F.; Vermeulen, H. Application of Pseudo-Random Impulse Perturbation for Characterizing Capacitor Voltage Transformer Frequency Responses. In Proceedings of the 2020 6th IEEE International Energy Conference (ENERGYCon), Gammarth, Tunis, 28 September–1 October 2020; pp. 744–748. [Google Scholar] [CrossRef]
- Gerber, I.P.; Mwaniki, F.M.; Vermeulen, H.J. Parameter Estimation of a Single-Phase Voltage Source Inverter using Pseudo-Random Impulse Sequence Perturbation. In Proceedings of the 2022 IEEE International Conference on Environment and Electrical Engineering and 2022 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Prague, Czech Republic, 28 June–1 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Z.; Chai, J.; Xiang, X.; Sun, X.; Lu, H. A Novel Online Parameter Identification Algorithm Designed for Deadbeat Current Control of the Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Appl. 2022, 58, 2029–2041. [Google Scholar] [CrossRef]
- Van Rooijen, J.; Vermeulen, H. A perturbation source for in situ parameter estimation applications. In Proceedings of the IECON’94—20th Annual Conference of IEEE Industrial Electronics, Bologna, Italy, 5–9 September 1994; Volume 3, pp. 1819–1823. [Google Scholar] [CrossRef]
- Yamashita, K.; Renner, H.; Martinez Villanueva, S.; Vennemann, K.; Martins, J.; Aristidou, P.; Van Cutsem, T.; Song, Z.; Lammert, G.; Pabon Ospina, L.; et al. Modelling of Inverter-Based Generation for Power System Dynamic Studies; Joint Working Group C4/C6.35/CIRED; CIGRE: Montreal, QC, Canada, 2018; Volume 298, pp. 81–87. [Google Scholar]
- Altahir, S.Y.; Yan, X.; Liu, X. A power sharing method for inverters in microgrid based on the virtual power and virtual impedance control. In Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Cadiz, Spain, 4–6 April 2017; pp. 151–156. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Zeng, Y. Can the output impedance of an inverter be designed capacitive? In Proceedings of the IECON 2011—37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, VIC, Australia, 7–10 November 2011; pp. 1220–1225. [Google Scholar] [CrossRef]
- Jessen, L.; Fuchs, F.W. Modeling of inverter output impedance for stability analysis in combination with measured grid impedances. In Proceedings of the 2015 IEEE 6th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aachen, Germany, 22–25 June 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Guruwacharya, N.; Bhujel, N.; Tamrakar, U.; Rauniyar, M.; Subedi, S.; Berg, S.E.; Hansen, T.M.; Tonkoski, R. Data-Driven Power Electronic Converter Modeling for Low Inertia Power System Dynamic Studies. In Proceedings of the 2020 IEEE Power & Energy Society General Meeting (PESGM), Virtual Event, 2–6 August 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Valdivia, V.; Lazaro, A.; Barrado, A.; Zumel, P.; Fernandez, C.; Sanz, M. Black-Box Modeling of Three-Phase Voltage Source Inverters for System-Level Analysis. IEEE Trans. Ind. Electron. 2012, 59, 3648–3662. [Google Scholar] [CrossRef]
- Reinikka, T.; Roinila, T.; Sun, J. Measurement Device for Inverter Output Impedance Considering the Coupling Over Frequency. In Proceedings of the 2020 IEEE 21st Workshop on Control and Modeling for Power Electronics (COMPEL), Aalborg, Denmark, 9–12 November 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Gong, H.; Wang, X.; Yang, D. DQ-Frame Impedance Measurement of Three-Phase Converters Using Time-Domain MIMO Parametric Identification. IEEE Trans. Power Electron. 2021, 36, 2131–2142. [Google Scholar] [CrossRef]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Small-Signal Stability Analysis of Three-Phase AC Systems in the Presence of Constant Power Loads Based on Measured d-q Frame Impedances. IEEE Trans. Power Electron. 2015, 30, 5952–5963. [Google Scholar] [CrossRef]
- Liu, J.; Du, X.; Shi, Y.; Tai, H.M. Impedance Measurement of Three-Phase Inverter in the Stationary Frame Using Frequency Response Analyzer. IEEE Trans. Power Electron. 2020, 35, 9390–9401. [Google Scholar] [CrossRef]
- Jokipii, J.; Messo, T.; Suntio, T. Simple method for measuring output impedance of a three-phase inverter in dq-domain. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–24 May 2014; pp. 1466–1470. [Google Scholar] [CrossRef]
- Li, M.; Nian, H.; Hu, B.; Xu, Y.; Liao, Y.; Yang, J. Design Method of Multi-Sine Signal for Broadband Impedance Measurement Considering Frequency Coupling Characteristic. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 532–543. [Google Scholar] [CrossRef]
- Li, F.; Wu, J.; Huang, Y.; Zhang, Y.; Zhang, X.; Ma, M. Analysis of online impedance measurement range based on voltage disturbance injection. Energy Rep. 2020, 6, 566–571. [Google Scholar] [CrossRef]
- Chang, L.; Jiang, X.; Mao, M.; Zhang, H. Parameter Identification of Controller for Photovoltaic Inverter Based on L-M Method. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Zhongqian, L.; Wu, H.; Jin, W.; Xu, B.; Ji, Y.; Wu, M. Two-step method for identifying photovoltaic grid-connected inverter controller parameters based on the adaptive differential evolution algorithm. IET Gener. Transm. Distrib. 2017, 11, 4282–4290. [Google Scholar]
- Shen, X.; Zheng, J.; Zhu, S.; Shu, L. d-q axis decoupling parameter identification strategy for the grid-connected inverter of photovoltaic generation system. In Proceedings of the 2012 China International Conference on Electricity Distribution, Shanghai, China, 5–6 September 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Dong, K.; Yan, J.; Shen, W.; Li, S.; Ma, X.; Jia, R. Parameter identification of grid-connected photovoltaic inverter based on adaptive—Improved GPSO algorithm. In Proceedings of the 2019 IEEE 8th International Conference on Advanced Power System Automation and Protection (APAP), Xi’an, China, 21–24 October 2019; pp. 1536–1540. [Google Scholar] [CrossRef]
- Zhu, H.; Lyu, J.; Xue, T.; Wang, Z.; Dai, J.; Shi, X.; Cai, X. A Controller Parameter Identification Method of PMSG-Based Wind Turbine Generator Based on Measured Impedance. In Proceedings of the 2021 IEEE 12th Energy Conversion Congress & Exposition—Asia (ECCE-Asia), Virtual, 10 October 2021; pp. 1151–1156. [Google Scholar] [CrossRef]
- Amin, M.; Molinas, M. A Gray-Box Method for Stability and Controller Parameter Estimation in HVDC-Connected Wind Farms Based on Nonparametric Impedance. IEEE Trans. Ind. Electron. 2019, 66, 1872–1882. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, Y.; Chen, Z. A Gray-Box Parameters Identification Method of Voltage Source Converter Using Vector Fitting Algorithm. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Republic of Korea, 27–31 May 2019; pp. 2948–2955. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, Y.; Cai, P.; Chen, Z. A Gray-Box Impedance Reshaping Method of Grid-Connected Inverter for Resonance Damping. In Proceedings of the 2019 10th International Conference on Power Electronics and ECCE Asia (ICPE 2019—ECCE Asia), Busan, Republic of Korea, 27–31 May 2019; pp. 2660–2667. [Google Scholar] [CrossRef]
- Zhou, W.; Torres-Olguin, R.E.; Wang, Y.; Chen, Z. A Gray-Box Hierarchical Oscillatory Instability Source Identification Method of Multiple-Inverter-Fed Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3095–3113. [Google Scholar] [CrossRef]
- Zhou, W.; Torres-Olguin, R.E.; Göthner, F.; Beerten, J.; Zadeh, M.K.; Wang, Y.; Chen, Z. A Robust Circuit and Controller Parameters’ Identification Method of Grid-Connected Voltage-Source Converters Using Vector Fitting Algorithm. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 2748–2763. [Google Scholar] [CrossRef]
- Pastor, M.; Dudrik, J. Design and control of LCL filter with active damping for grid-connected inverter. In Proceedings of the 2015 International Conference on Electrical Drives and Power Electronics (EDPE), Tatranska Lomnica, Slovakia, 21–23 September 2015; pp. 465–469. [Google Scholar] [CrossRef]
- SMA. Specification Sheet; Technical Report; SMA Solar Technology AG: Melbourne, Australia, 2010. [Google Scholar]
- Meneses, D.; Blaabjerg, F.; García, O.; Cobos, J.A. Review and Comparison of Step-Up Transformerless Topologies for Photovoltaic AC-Module Application. IEEE Trans. Power Electron. 2013, 28, 2649–2663. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Fu, Z.F. 10—Multi-input multi-output modal analysis methods. In Modal Analysis; He, J., Fu, Z.F., Eds.; Butterworth-Heinemann: Oxford, UK, 2001; pp. 198–223. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Cf [] | Lf [mH] | Lg [] | ||||
|---|---|---|---|---|---|---|---|
| Value | 5.4 | 400 | 1 | 314.16 | 5.3 | 18 | 9 |
| Coefficient | Value |
|---|---|
| 0 | |
| 50 Hz | 58 Hz | 515 Hz | 23 kHz | |||||
|---|---|---|---|---|---|---|---|---|
| Parameter | Damping | Shifting | Damping | Shifting | Damping | Shifting | Damping | Shifting |
| x | x | |||||||
| x | x | |||||||
| x | x | |||||||
| x | x | |||||||
| x | x | x | ||||||
| x | x | |||||||
| x | x | |||||||
| GA Parameters | Parameter Value |
|---|---|
| Population size | 70 |
| Number of real variables | 7 |
| Crossover fraction | 0.8 |
| Mutation fraction | 0.01 |
| Migration fraction | 0.2 |
| Seed for random number generator | 0 |
| Maximum iterations | 700 |
| Population size | 200 |
| Parallel computing enabled | Yes |
| Particle Swarm Parameters | Parameter Value |
|---|---|
| Maximum inertia weight | 0.1 |
| Minimum inertia weight | 1.1 |
| Maximum iterations | 1400 |
| Minimum adaptive neighborhood size | 0.25 |
| Particle velocity adjustment weight | 1.49 |
| Neighbourhood velocity adjustment weight | 1.49 |
| Swarm size | 100 |
| Step | kp Error [%] | ki Error [%] | ωpr Error [%] | ωg Error [%] | Cf [F] | Cf Error [%] | Lf [mH] | Lf Error [%] | Lg [H] | Lg Error [%] | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 4.76 | 11.89 | 560.60 | 40.15 | 0.60 | 40.29 | 313.35 | 0.26 | 6.27 | 18.27 | 15.20 | 15.54 | 7.61 | 15.44 |
| 2 | 5.40 | 0.02 | 400.08 | 0.02 | 0.99 | 0.03 | 314.16 | 0.00 | 5.3 | 0.02 | 0.018 | 0.01 | 9 | 0.05 |
| Specification | Value |
|---|---|
| Maximum DC Voltage | 600V |
| Nominal DC voltage | 400 V |
| Minimum DC voltage | 125 V |
| Nominal AC power | 1600 W |
| Nominal AC voltage | |
| Maximum output current | |
| Power factor | 1 |
| Maximum efficiency | |
| Topology | Transformerless |
| Setup | PRBS Order | |||||
|---|---|---|---|---|---|---|
| 1 | 15 | 30 kHz | 160 | 100 | 2.2 mH | 100 nF |
| 2 | 12 | 6 kHz | 160 | 100 | 1 mH | 1 F |
| Setup | PRBS Order | ||
|---|---|---|---|
| 1 | 14 | 16 kHz | 5 |
| 2 | 12 | 3 kHz | 5 |
| PRIS Source | PRBS Source |
|---|---|
| The series RLC circuit that is incorporated in the PRIS source allows for increased protection of the H-bridge and DC source, while also providing an additional means of controlling the time-and frequency-domain characteristics of the PRIS | Fewer components are used to construct the PRBS source |
| Can be connected in parallel with the system under test thus Can be used to characterize an inverter and the grid simultaneously | Can be connected in series with the system under test and based on practical measurements that are conducted in this work, it produces better perturbation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gerber, I.P.; Mwaniki, F.M.; Vermeulen, H.J. Parameter Estimation of a Grid-Tied Inverter Using In Situ Pseudo-Random Perturbation Sources. Energies 2023, 16, 1414. https://doi.org/10.3390/en16031414
Gerber IP, Mwaniki FM, Vermeulen HJ. Parameter Estimation of a Grid-Tied Inverter Using In Situ Pseudo-Random Perturbation Sources. Energies. 2023; 16(3):1414. https://doi.org/10.3390/en16031414
Chicago/Turabian StyleGerber, Ian Paul, Fredrick Mukundi Mwaniki, and Hendrik Johannes Vermeulen. 2023. "Parameter Estimation of a Grid-Tied Inverter Using In Situ Pseudo-Random Perturbation Sources" Energies 16, no. 3: 1414. https://doi.org/10.3390/en16031414