
Optimal Control of a Single-Stage Modular PV-Grid-Driven System Using a Gradient Optimization Algorithm
 , , , , ,
, , , , ,  , and
, and
Abstract
:1. Introduction
- -
- Introduce an efficient method for the reliable execution of the PV-interfaced utility grid.
- -
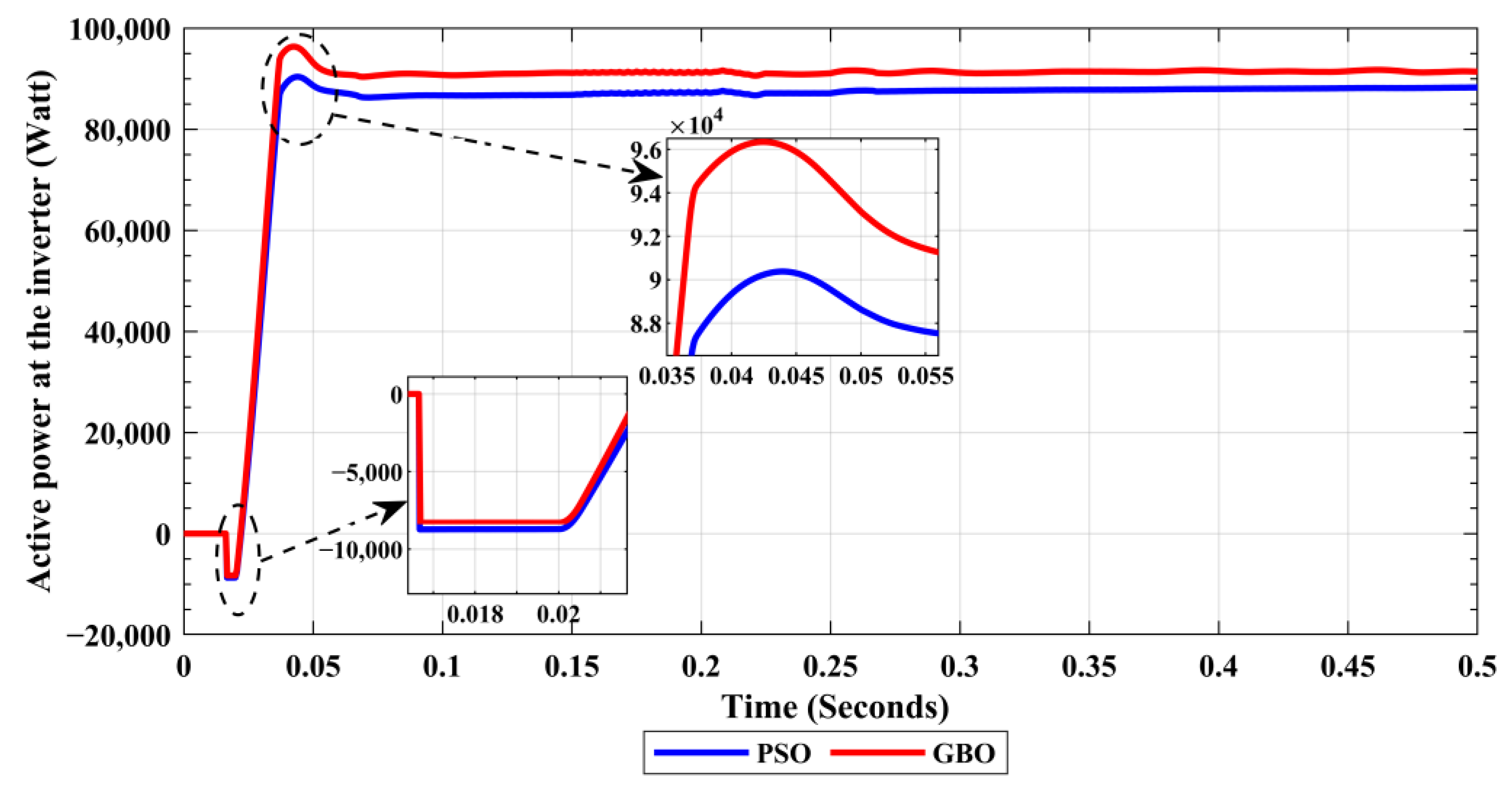
- Regulate active and reactive power and guarantee optimal power sharing.
- -
- Decrease the fluctuations in real and reactive power which lead to reduced power losses.
- -
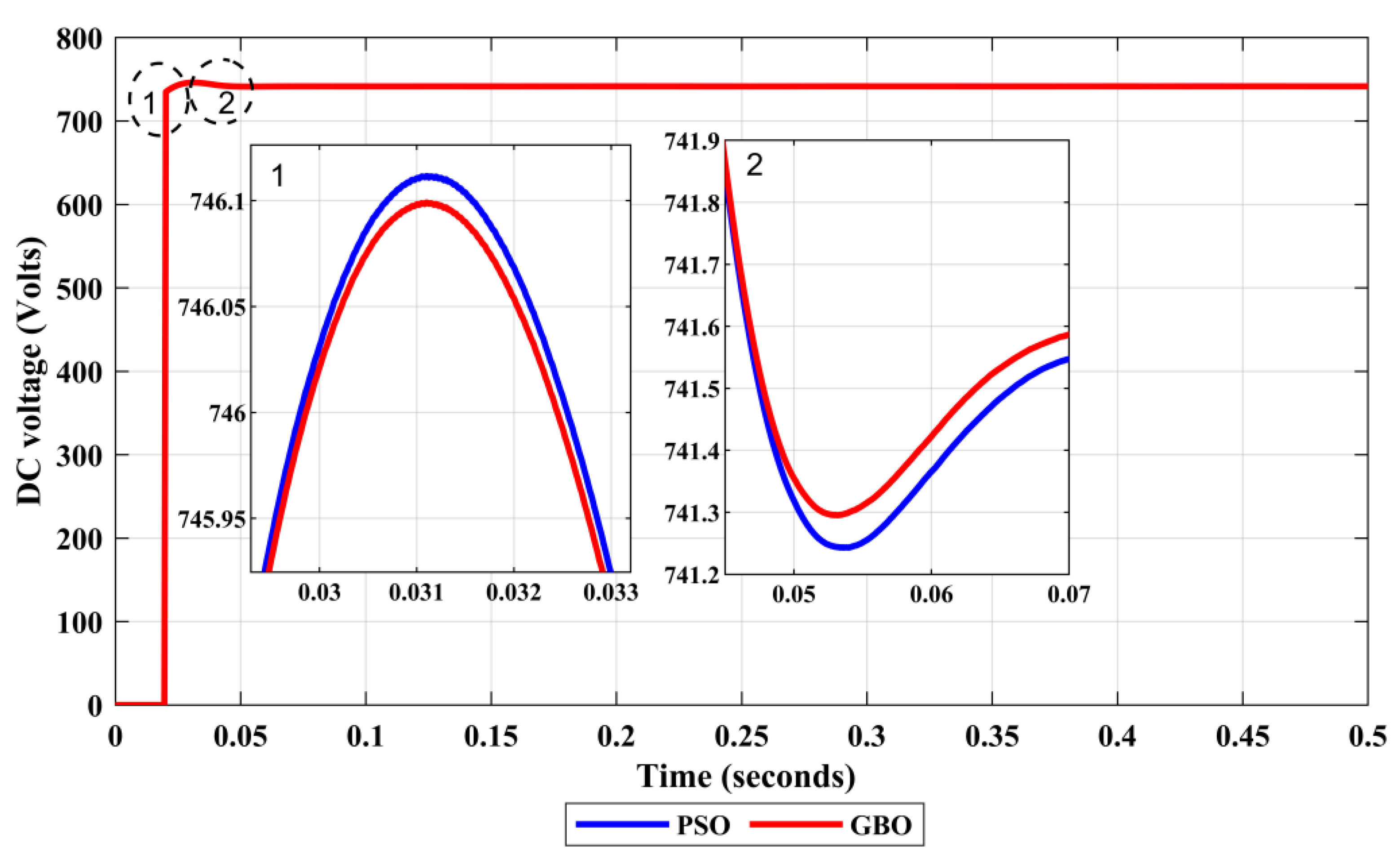
- Fine-tune the DC-link voltage.
- -
- Improve the transient response significations (percentage overshoot, settling time).
- -
- Enhance the dynamic response of the proposed method using PSO and GBO.
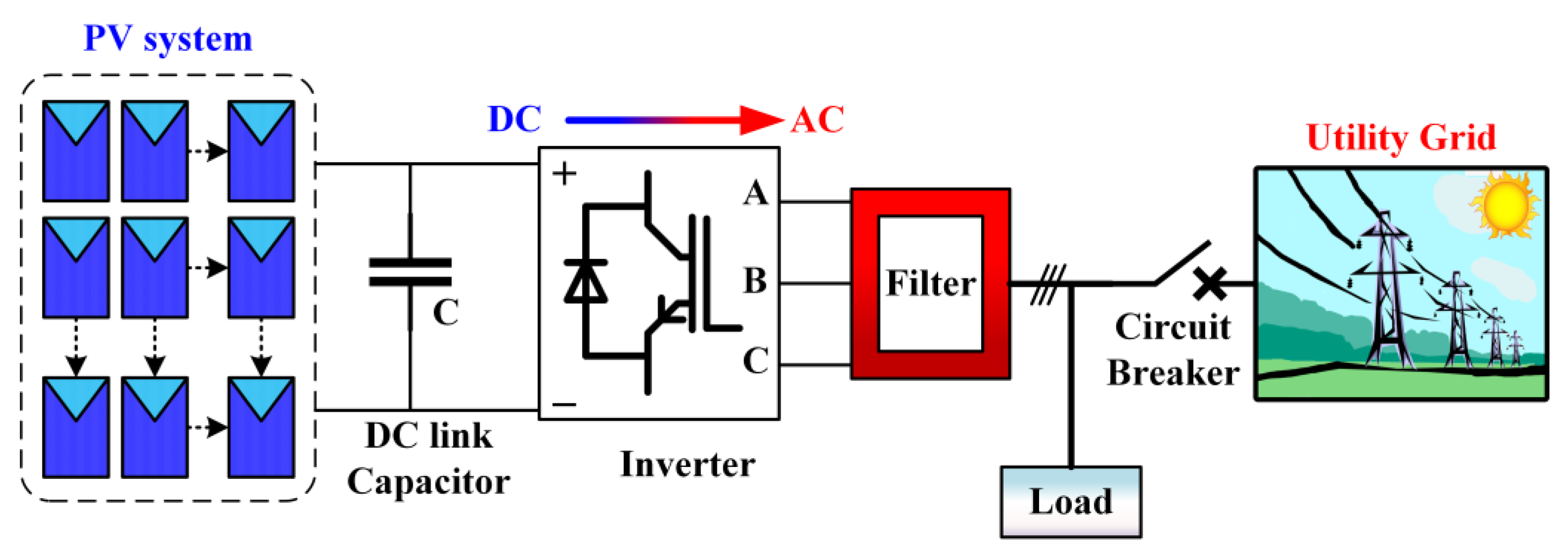
2. Microgrid Configuration
2.1. Proposed DC Voltage, Active and Reactive Power (DC-V-PQ) Control of Grid-Connected Microgrid
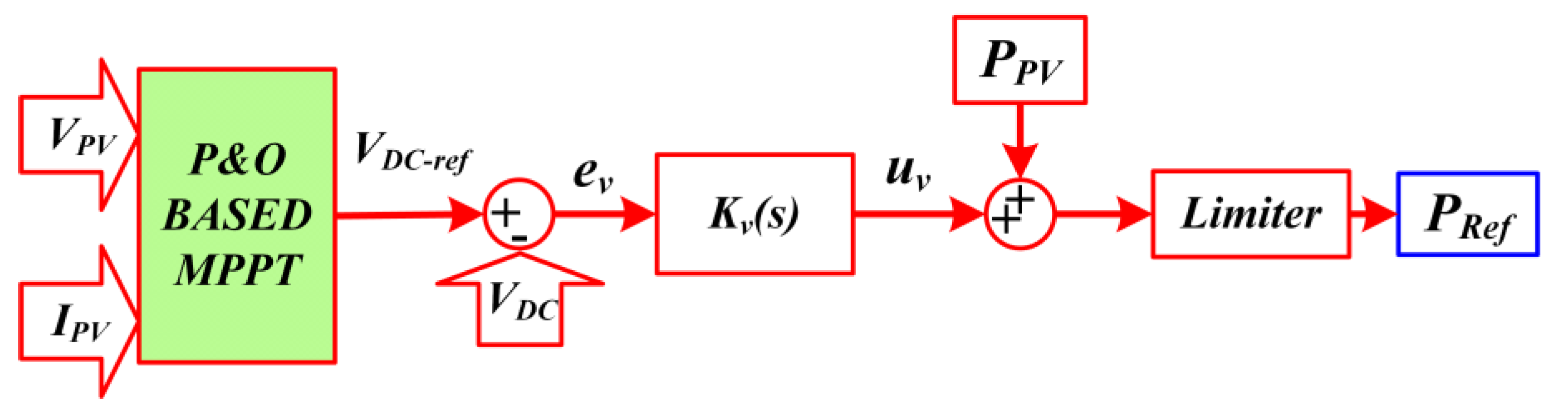
2.2. DC Voltage Control
2.2.1. MPPT P&O
2.2.2. Adjusting DC Voltage Control
2.3. Real and Reactive Power References
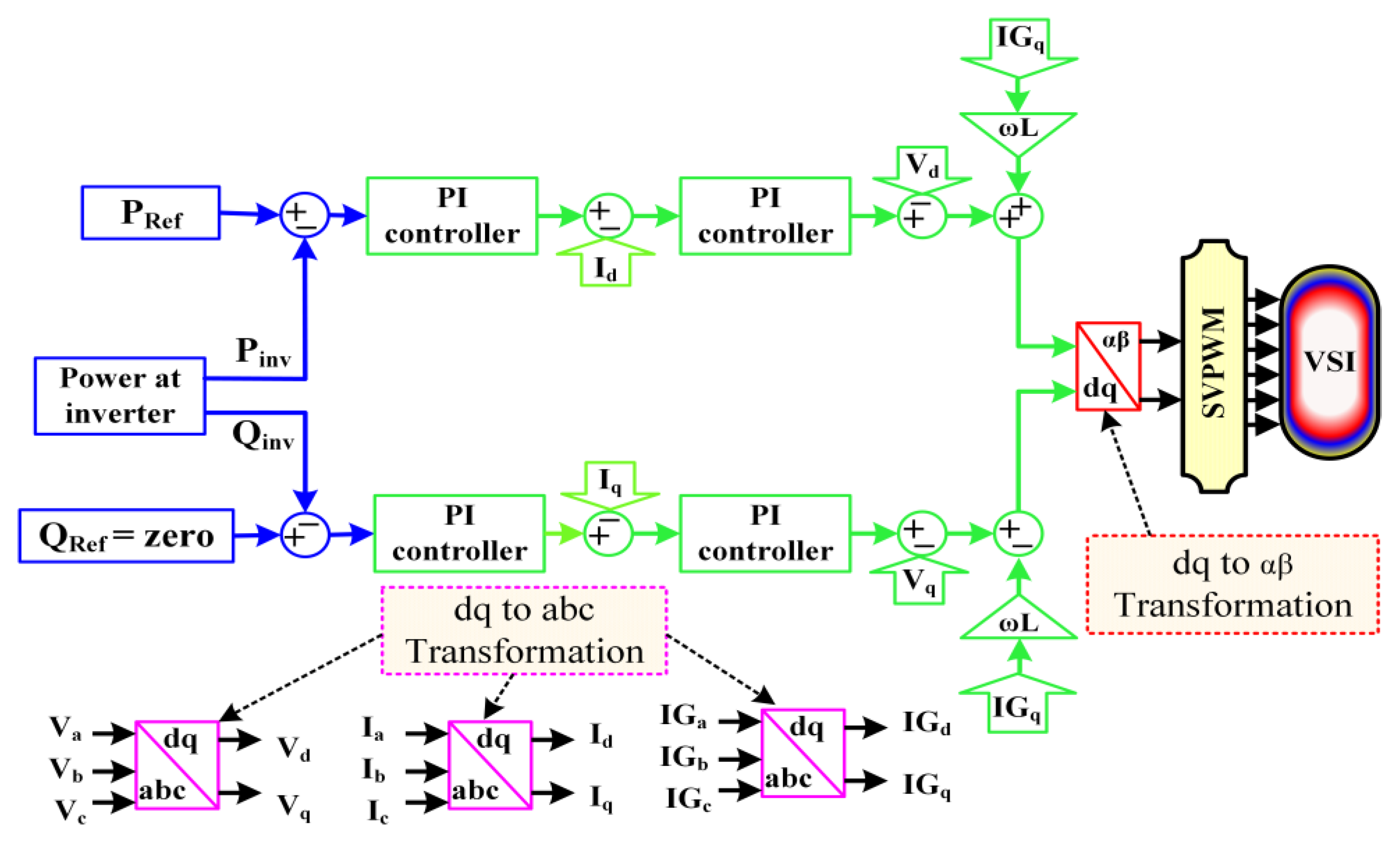
2.4. Active and Reactive Power (PQ) Control
- , represent the voltage of the inverter using the d-q axis.
- , represent the currents in the axis and the axis, respectively.
2.5. Current Control Strategy
2.6. Space Vector Pulse Width Modulation (SVPWM)
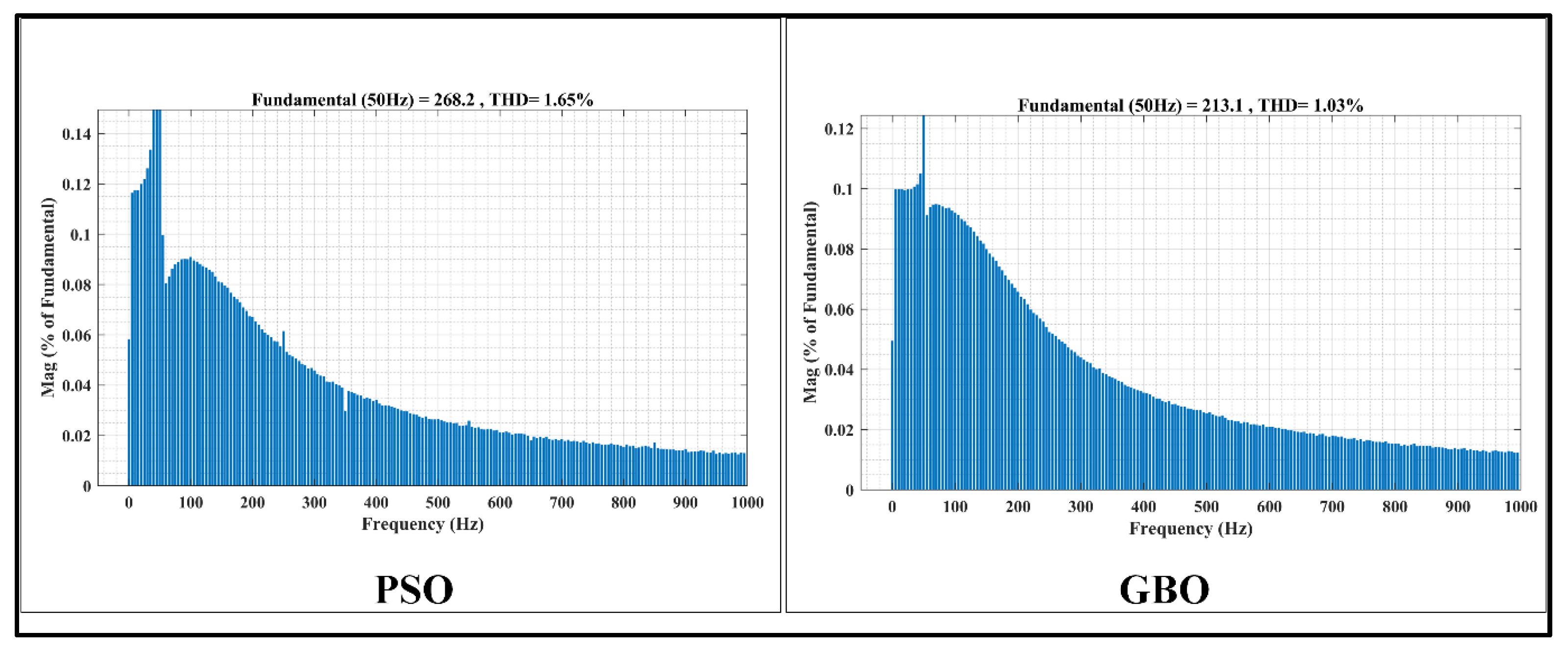
2.7. Harmonics Standard
- -
- For twelve pulse devices—14% (also acceptable for modern IGBTs devices).
- -
- For six pulse devices—30%.
- -
- For four pulses devices—45% (single-phase devices) [57].
3. Optimization Procedure
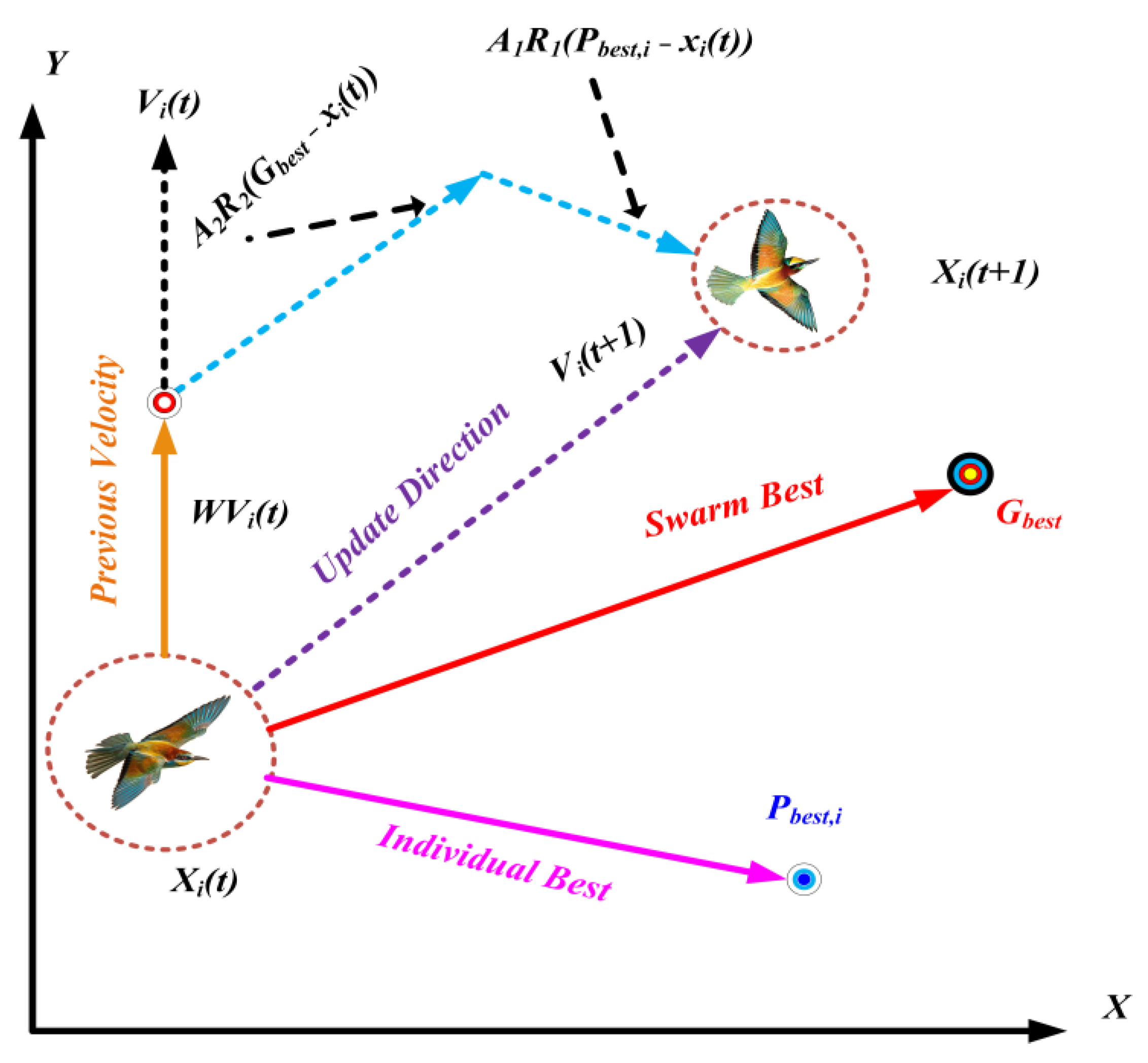
3.1. Particle Swarm Optimization (PSO) Algorithm
- Step 1:
- Evaluating the value of the objective function for all particles.
- Step 2:
- Renewing local () and global () best values of the positions.
- Step 3:
- Updating the values of the velocity and positions of each particle.
- Step 4:
- Updating the values of the inertia and the next generation [60].
3.2. Gradient Optimizer Algorithm (GBO)
3.2.1. Gradient Search Rule
3.2.2. Local Escaping Operator
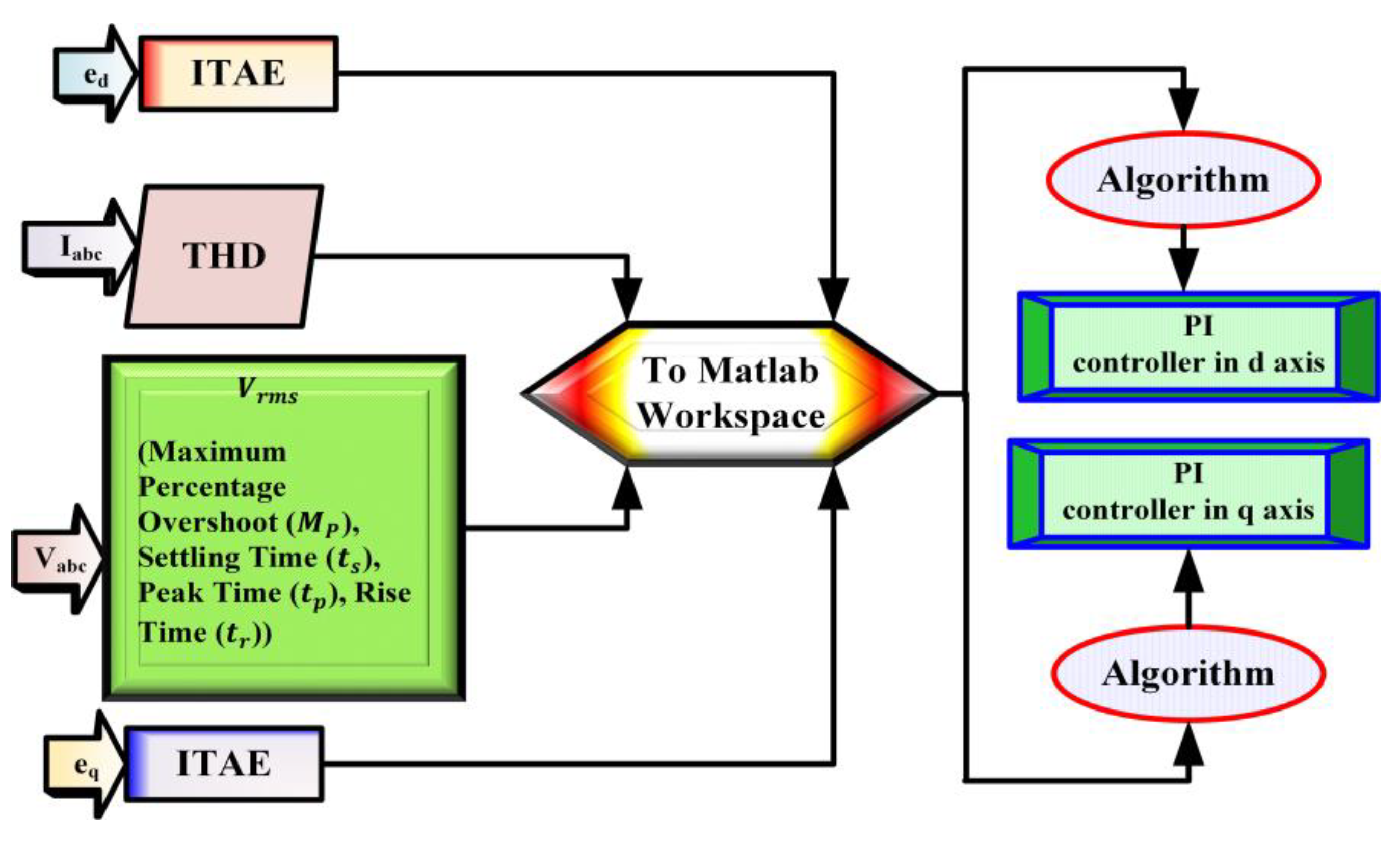
3.3. Objective Function
4. Results and Discussions
4.1. Case Study
4.2. Optimization of the Grid-Interfaced Microgrid
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbols | |
| DC voltage | |
| sample time | |
| Switch frequency | |
| Proportional parameter of PI controller in d vector | |
| Proportional parameter of PI controller in q vector | |
| Integral parameter of PI controller in d vector | |
| Integral parameter of PI controller in q vector | |
| Error in in d vector | |
| Error in in q vector | |
| Abbreviations | |
| PV | Photovoltaic |
| VSI | Voltage source inverter |
| PI | proportional integral |
| PID | Proportional integral derivative |
| PSO | Particle swarm optimization |
| IGBT | Insulated gate bipolar transistor |
| ITAE | Integral time absolute error |
| rms | Root mean square |
| P&O | Perturb and observe |
| MPPT | Maximum power point tracking |
| SVPWM | Space vector pulse width modulation |
| Objective function | |
| GBO | Gradient-base optimizer |
| DC V-P-Q | DC Voltage, active and reactive power |
References
- Luo, F.L.; Hong, Y. Advanced DC/AC Inverters: Applications in Renewable Energy; CRC Press: Boca Raton, FL, USA, 2017; pp. 1–319. [Google Scholar]
- Memon, A.; Wazir Bin Mustafa, M.; Anjum, W.; Ahmed, A.; Ullah, S.; Altbawi, S.M.A.; Jumani, T.A.; Khan, I.; Hamadneh, N.N. Dynamic response and low voltage ride-through enhancement of brushless double-fed induction generator using Salp swarm optimization algorithm. PLoS ONE 2022, 17, e0265611. [Google Scholar] [CrossRef]
- Zeb, K.; Uddin, W.; Khan, M.A.; Ali, Z.; Ali, M.U.; Christofides, N.; Kim, H.J. A comprehensive review on inverter topologies and control strategies for grid connected photovoltaic system. Renew. Sustain. Energy Rev. 2018, 94, 1120–1141. [Google Scholar] [CrossRef]
- Ahmed, M.; Harbi, I.; Kennel, R.; Rodríguez, J.; Abdelrahem, M. Evaluation of the Main Control Strategies for Grid-Connected PV Systems. Sustainability 2022, 14, 1142. [Google Scholar] [CrossRef]
- Wang, Y.; Nguyen, T.L.; Xu, Y.; Li, Z.; Tran, Q.T.; Caire, R. Cyber-Physical Design and Implementation of Distributed Event-Triggered Secondary Control in Islanded Microgrids. IEEE Trans. Ind. Appl. 2019, 55, 5631–5642. [Google Scholar] [CrossRef]
- Li, Z.; Xu, Y.; Feng, X.; Wu, Q. Optimal Stochastic Deployment of Heterogeneous Energy Storage in a Residential Multienergy Microgrid with Demand-Side Management. IEEE Trans. Ind. Inform. 2021, 17, 991–1004. [Google Scholar] [CrossRef]
- Cheng, X.; Zheng, Y.; Lin, Y.; Chen, L.; Wang, Y.; Qiu, J. Hierarchical operation planning based on carbon-constrained locational marginal price for integrated energy system. Int. J. Electr. Power Energy Syst. 2021, 128, 106714. [Google Scholar] [CrossRef]
- Wang, Z.; Fu, P.; Huang, L.; Chen, X.; He, S.; Wang, Z.; Chen, T.; Wang, Z.; Tong, W. Unified power control strategy for new generation poloidal field power supply. Fusion Eng. Des. 2021, 168, 112404. [Google Scholar] [CrossRef]
- Dozein, M.G.; Gomis-Bellmunt, O.; Mancarella, P. Simultaneous Provision of Dynamic Active and Reactive Power Response from Utility-Scale Battery Energy Storage Systems in Weak Grids. IEEE Trans. Power Syst. 2021, 36, 5548–5557. [Google Scholar] [CrossRef]
- Šimek, P.; Bejvl, M.; Valouch, V. Power control for grid-connected converter based on generalized predictive current control. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 7072–7083. [Google Scholar] [CrossRef]
- Imam, A.A.; Sreerama Kumar, R.; Al-Turki, Y.A. Modeling and simulation of a pi controlled shunt active power filter for power quality enhancement based on p-q theory. Electronics 2020, 9, 637. [Google Scholar] [CrossRef]
- Ma, D.; Cao, X.; Sun, C.; Wang, R.; Sun, Q.; Xie, X.; Peng, W. Dual-Predictive Control With Adaptive Error Correction Strategy for AC Microgrids. IEEE Trans. Power Deliv. 2022, 37, 1930–1940. [Google Scholar] [CrossRef]
- Monshizadeh, N.; Mancilla-David, F.; Ortega, R.; Cisneros, R. Nonlinear Stability Analysis of the Classical Nested PI Control of Voltage Sourced Inverters. IEEE Control Syst. Lett. 2022, 6, 1442–1447. [Google Scholar] [CrossRef]
- Khomsi, C.; Bouzid, M.; Jelassi, K. Power quality improvement in a three-phase grid tied photovoltaic system supplying unbalanced and nonlinear loads. Int. J. Renew. Energy Res. 2018, 8, 1165–1177. [Google Scholar] [CrossRef]
- Ansari, M.N.; Singh, R.K. Application of D-STATCOM for Harmonic Reduction using Power Balance Theory. Turk. J. Comput. Math. Educ. TURCOMAT 2021, 12, 2496–2503. [Google Scholar] [CrossRef]
- Sun, L.; Jin, Y.; Pan, L.; Shen, J.; Lee, K.Y. Efficiency analysis and control of a grid-connected PEM fuel cell in distributed generation. Energy Convers. Manag. 2019, 195, 587–596. [Google Scholar] [CrossRef]
- Duarte, S.N.; Almeida, P.M.; Barbosa, P.G. Voltage regulation of a remote microgrid bus with a modular multilevel STATCOM. Electr. Power Syst. Res. 2022, 212, 108299. [Google Scholar] [CrossRef]
- Singh, B.; Shah, P.; Hussain, I. ISOGI-Q Based Control Algorithm for a Single Stage Grid Tied SPV System. IEEE Trans. Ind. Appl. 2018, 54, 1136–1145. [Google Scholar] [CrossRef]
- Shah, P.; Hussain, I.; Singh, B. Single-Stage SECS interfaced with grid using ISOGI-FLL-based control algorithm. IEEE Trans. Ind. Appl. 2019, 55, 701–711. [Google Scholar] [CrossRef]
- Agarwal, R.K.; Hussain, I.; Singh, B. LMF-based control algorithm for single stage three-phase grid integrated solar PV system. IEEE Trans. Sustain. Energy 2016, 7, 1379–1387. [Google Scholar] [CrossRef]
- Agarwal, R.K.; Hussain, I.; Singh, B. Implementation of LLMF Control Algorithm for Three-Phase Grid-Tied SPV-DSTATCOM System. IEEE Trans. Ind. Electron. 2017, 64, 7414–7424. [Google Scholar] [CrossRef]
- Kumar, N.; Singh, B.; Panigrahi, B.K. LLMLF-Based Control Approach and LPO MPPT Technique for Improving Performance of a Multifunctional Three-Phase Two-Stage Grid Integrated PV System. IEEE Trans. Sustain. Energy 2020, 11, 371–380. [Google Scholar] [CrossRef]
- Badoni, M.; Singh, A.; Singh, B. Comparative Performance of Wiener Filter and Adaptive Least Mean Square-Based Control for Power Quality Improvement. IEEE Trans. Ind. Electron. 2016, 63, 3028–3037. [Google Scholar] [CrossRef]
- Wang, G.; Wang, X.; Lv, J. An Improved Harmonic Suppression Control Strategy for the Hybrid Microgrid Bidirectional AC/DC Converter. IEEE Access 2020, 8, 220422–220436. [Google Scholar] [CrossRef]
- Ray, P.K. Power Quality Improvement Using VLLMS Based Adaptive Shunt Active Filter. CPSS Trans. Power Electron. Appl. 2018, 3, 154–162. [Google Scholar] [CrossRef]
- Hussain, I.; Agarwal, R.K.; Singh, B. MLP Control Algorithm for Adaptable Dual-Mode Single-Stage Solar PV System Tied to Three-Phase Voltage-Weak Distribution Grid. IEEE Trans. Ind. Inf. 2018, 14, 2530–2538. [Google Scholar] [CrossRef]
- Chawda, G.S.; Shaik, A.G.; Mahela, O.P.; Padmanaban, S.; Holm-Nielsen, J.B. Comprehensive Review of Distributed FACTS Control Algorithms for Power Quality Enhancement in Utility Grid With Renewable Energy Penetration. IEEE Access 2020, 8, 107614–107634. [Google Scholar] [CrossRef]
- Khorramabadi, S.S.; Bakhshai, A. Critic-Based Self-Tuning PI Structure for Active and Reactive Power Control of VSCs in Microgrid Systems. IEEE Trans. Smart Grid 2014, 6, 92–103. [Google Scholar] [CrossRef]
- Balasubramanian, R.; Sankaran, R.; Palani, S. Simulation and performance evaluation of shunt hybrid power filter using fuzzy logic based non-linear control for power quality improvement. Sadhana Acad. Proc. Eng. Sci. 2017, 42, 1443–1452. [Google Scholar] [CrossRef]
- Tali, M.; Esadki, A.; Nasser, T.; Boukezata, B. Active power filter for power quality in grid connected PV-system using an improved fuzzy logic control MPPT. In Proceedings of the 2018 6th International Renewable and Sustainable Energy Conference, IRSEC 2018, Rabat, Morocco, 5–8 December 2018. [Google Scholar] [CrossRef]
- Shan, Y.; Hu, J.; Liu, H. A Holistic Power Management Strategy of Microgrids Based on Model Predictive Control and Particle Swarm Optimization. IEEE Trans. Ind. Inform. 2021, 18, 5115–5126. [Google Scholar] [CrossRef]
- Durairasan, M.; Balasubramanian, D. An efficient control strategy for optimal power flow management from a renewable energy source to a generalized three-phase microgrid system: A hybrid squirrel search algorithm with whale optimization algorithm approach. Trans. Inst. Meas. Control 2020, 42, 1960–1976. [Google Scholar] [CrossRef]
- Ramadan, H.S.; Padmanaban, S.; Mosaad, M.I. Metaheuristic-based Near-Optimal Fractional Order PI Controller for On-grid Fuel Cell Dynamic Performance Enhancement. Electr. Power Syst. Res. 2022, 208, 107897. [Google Scholar] [CrossRef]
- Sameh, M.A.; Marei, M.I.; Badr, M.A.; Attia, M.A. An Optimized PV Control System Based on the Emperor Penguin Optimizer. Energies 2021, 14, 751. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.; Ayob, A.; Mutlag, A.H.; Ustun, T.S. Optimal fuzzy logic controller based PSO for photovoltaic system. Energy Rep. 2023, 9, 427–434. [Google Scholar] [CrossRef]
- Arfeen, Z.A.; Kermadi, M.; Azam, M.K.; Siddiqui, T.A.; Akhtar, Z.U.; Ado, M.; Abdullah, P. Insights and trends of optimal voltage-frequency control DG-based inverter for autonomous microgrid: State-of-the-art review. Int. Trans. Electr. Energy Syst. 2020, 30, 1–26. [Google Scholar] [CrossRef]
- Altbawi, S.M.A.; Mokhtar, A.S.; Arfeen, Z.A. Enhacement of microgrid technologies using various algorithms. Turk. J. Comput. Math. Educ. 2021, 12, 1127–1170. [Google Scholar]
- Hamrouni, N.; Jraidi, M.; Chérif, A. New method of current control for LCL-interfaced grid-connected three phase voltage source inverter. Rev. Énergie. Renouvelables 2010, 13, 1–14. [Google Scholar]
- Geury, T.; Pinto, S.; Gyselinck, J. Three-phase power controlled PV current source inverter with incorporated active power filtering. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1374–1379. [Google Scholar] [CrossRef]
- Jumani, T.A.; Mustafa, M.W.; Rasid, M.; Mirjat, N.H.; Baloch, M.H.; Salisu, S. Optimal Power Flow Controller for Grid-Connected Microgrids using Grasshopper Optimization Algorithm. Electronics 2019, 8, 111. [Google Scholar] [CrossRef]
- Zeng, Z.; Yang, H.; Zhao, R.; Cheng, C. Topologies and control strategies of multi-functional grid-connected inverters for power quality enhancement: A comprehensive review. Renew. Sustain. Energy Rev. 2013, 24, 223–270. [Google Scholar] [CrossRef]
- Harrag, A.; Messalti, S. PSO-based SMC variable step size P&O MPPT controller for PV systems under fast changing atmospheric conditions. Int. J. Numer. Model. Electron. Netw. Devices Fields 2019, 32, e2603. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Kumar, P.D.S.; Samanta, S.; Mishra, S. Steady Output and Fast Tracking MPPT (SOFT-MPPT) for P&O and InC Algorithms. IEEE Trans. Sustain. Energy 2021, 12, 293–302. [Google Scholar] [CrossRef]
- Zhu, Y.L.; Yao, J.G.; Wu, D. Comparative study of two stages and single stage topologies for grid-tie photovoltaic generation by PSCAD/EMTDC. In Proceedings of the 2011 International Conference on Advanced Power System Automation and Protection, Beijing, China, 16–20 October 2011; Volume 2, pp. 1304–1309. [Google Scholar] [CrossRef]
- Aijaz, M.; Hussain, I.; Lone, S.A. Golden Eagle Optimized Control for a Dual Stage Photovoltaic Residential System with Electric Vehicle Charging Capability. Energy Sources Part A Recover. Util. Environ. Eff. 2022, 44, 4525–4545. [Google Scholar] [CrossRef]
- Keshta, H.E.; Saied, E.M.; Malik, O.P.; Bendary, F.M.; Ali, A.A. Fuzzy PI controller-based model reference adaptive control for voltage control of two connected microgrids. IET Gener. Transm. Distrib. 2020, 15, 602–618. [Google Scholar] [CrossRef]
- Mehta, G.; Singh, S. Design of single-stage three-phase grid-connected photovoltaic system with MPPT and reactive power compensation control. Int. J. Power Energy Convers. 2014, 5, 211–227. [Google Scholar] [CrossRef]
- Mahdavi, M.S.; Gharehpetian, G.B.; Ghasemi, A. An Enhanced Converter-based Diesel Generator Emulator for Voltage and Frequency Control Studies in Laboratory-Scale Microgrids. Iran. J. Sci. Technol. Trans. Electr. Eng. 2021, 45, 945–957. [Google Scholar] [CrossRef]
- Sureshkumar, K.; Ponnusamy, V. Power flow management in micro grid through renewable energy sources using a hybrid modified dragonfly algorithm with bat search algorithm. Energy 2019, 181, 1166–1178. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Hussain, S.A. Adaptive PI secondary control for smart autonomous microgrid systems. Int. J. Adapt. Control Signal Process. 2015, 29, 1442–1458. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, P. A novel strategy for improving power quality of islanded hybrid AC/DC microgrid using parallel-operated interlinking converters. Int. J. Electr. Power Energy Syst. 2022, 138, 107961. [Google Scholar] [CrossRef]
- Bo, L.; Huang, L.; Dai, Y.; Lu, Y.; Chong, K.T. Mitigation of DC Components Using Adaptive BP-PID Control in Transformless Three-Phase Grid-Connected Inverters. Energies 2018, 11, 2047. [Google Scholar] [CrossRef]
- Kakkar, S.; Ahuja, R.K.; Maity, T. Performance enhancement of grid-interfaced inverter using intelligent controller. Meas. Control 2020, 53, 551–563. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Xiong, C.; Yang, S.; Yang, H.; Feng, X. A Simplified Space Vector Pulsewidth Modulation Scheme for Three-Phase Cascaded H-Bridge Inverters. IEEE Trans. Power Electron. 2019, 35, 4192–4204. [Google Scholar] [CrossRef]
- Lewicki, A.; Odeh, C.; Morawiec, M. Space Vector Pulsewidth Modulation Strategy for Multilevel Cascaded H-Bridge Inverter With DC-Link Voltage Balancing Ability. IEEE Trans. Ind. Electron. 2022, 70, 1161–1170. [Google Scholar] [CrossRef]
- IEEE. IEEE Standard 519-2014, IEEE, 1–50, 2014, [Online]. Available online: https://www.schneider-electric.com.tw/documents/Event/2016_electrical_engineering_seminar/IEEE_STD_519_1992vs2014.pdf (accessed on 16 January 2022).
- Technologies, C.G. AGN 025—Non Linear Loads, Cummins Generator Technologies. Available online: https://www.stamford-avk.com/sites/stamfordavk/files/AGN025_B.pdf (accessed on 28 January 2022).
- Mirjalili, S. Evolutionary Algorithms and Neural Networks, 1st ed.; Springer International Publishing: New York, NY, USA, 2019. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings. IEEE World Congress on Computational Intelligence (Cat. No. 98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Bakht, M.P.; Salam, Z.; Bhatti, A.R.; Ullah Sheikh, U.; Khan, N.; Anjum, W. Techno-economic modelling of hybrid energy system to overcome the load shedding problem: A case study of Pakistan. PLoS ONE 2022, 17, e0266660. [Google Scholar] [CrossRef] [PubMed]
- Ahmadianfar, I.; Bozorg-Haddad, O.; Chu, X. Gradient-based optimizer: A new metaheuristic optimization algorithm. Inf. Sci. 2020, 540, 131–159. [Google Scholar] [CrossRef]
- Premkumar, M.; Jangir, P.; Sowmya, R. MOGBO: A new Multiobjective Gradient-Based Optimizer for real-world structural optimization problems. Knowl. Based Syst. 2021, 218, 106856. [Google Scholar] [CrossRef]
- Mohamed, R.G.; Ebrahim, M.A.; Alaas, Z.M.; Ahmed, M.M.R. Optimal Energy Harvesting of Large-Scale Wind Farm Using Marine Predators Algorithm. IEEE Access 2022, 10, 24995–25004. [Google Scholar] [CrossRef]
- Ebrahim, M.A.; Ayoub, B.A.A.; Nashed, M.N.F.; Osman, F.A.M. A Novel Hybrid-HHOPSO Algorithm Based Optimal Compensators of Four-Layer Cascaded Control for a New Structurally Modified AC Microgrid. IEEE Access 2020, 9, 4008–4037. [Google Scholar] [CrossRef]
- Ebrahim, M.A.; Aziz, B.A.; Nashed, M.N.; Osman, F. Optimal design of controllers and harmonic compensators for three-level cascaded control in stationary reference frame for grid-supporting inverters-based AC microgrid. Energy Rep. 2022, 8, 860–877. [Google Scholar] [CrossRef]
- Salim, O.M.; Aboraya, A.; Arafa, S.I. Cascaded controller for a standalone microgrid-connected inverter based on triple-action controller and particle swarm optimisation. IET Gener. Transm. Distrib. 2020, 14, 3389–3399. [Google Scholar] [CrossRef]
- Jumani, T.A.; Mustafa, M.W.; Rasid, M.; Mirjat, N.H.; Leghari, Z.H.; Saeed, M.S. Optimal Voltage and Frequency Control of an Islanded Microgrid Using Grasshopper Optimization Algorithm. Energies 2018, 11, 3191. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
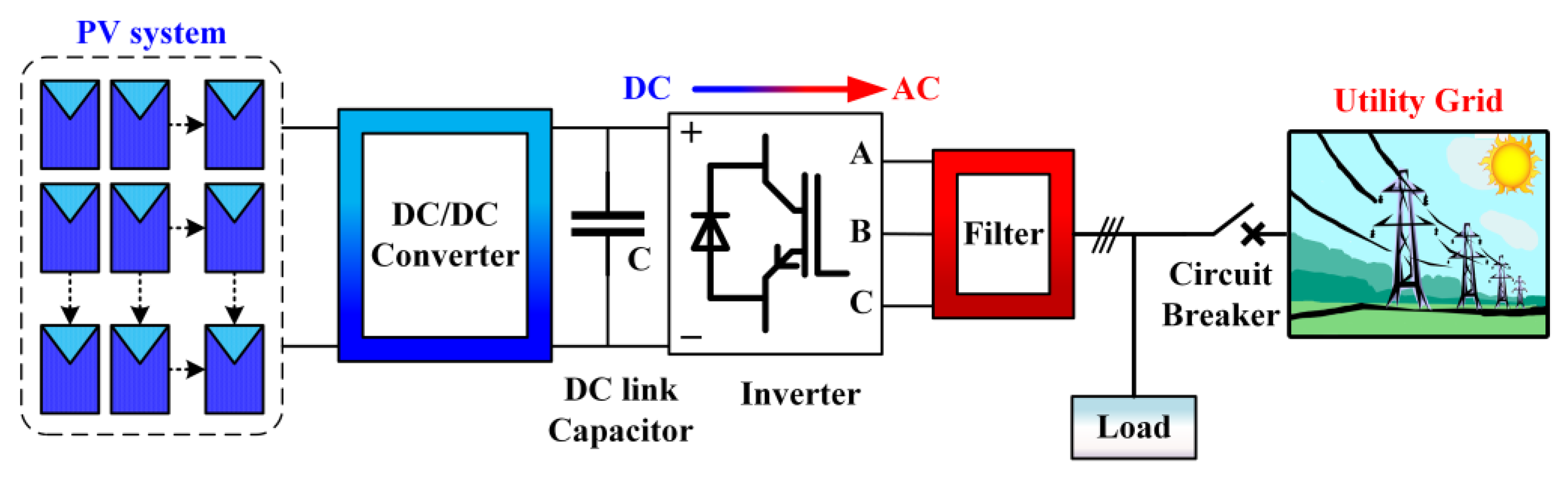
| No. | Single Stage | Dual Stage |
|---|---|---|
| 1 | Unit control strategy utilized hybrid control of both DC and AC voltage, and injected to DC/AC inverter. | DC and AC voltage regulation in separated parts. DC part injected to DC/DC converter whilst AC part injected to DC/AC inverter. |
| 2 | Complex, cost effective, high efficiency | Simple control, high cost, efficiency degrades |
| 3 | Bi-directional | Bi-directional with extra components |
| 4 | Component addon depends on power level | Component addon relies on power level |
| 5 | Efficiency is higher, especially at rising power levels and densities | Acceptable efficiency at low to medium power levels and densities |
| 6 | Output stage more rugged | Output stage less rugged |
| Hyper Variables | Value |
|---|---|
| Root-mean-square voltage () | |
| Rated frequency | |
| Switching frequency () | |
| DC link voltage ) | |
| DC link capacitor () | |
| Inverter choke (RL) of LC filter | |
| Filter (C) parameters of LC filter | |
| Source impedance of the utility grid | |
| Linear load 1 | |
| Linear load 2 | |
| Nonlinear load |
| Optimization | Objective Function | Best Fitness Value | ||||
|---|---|---|---|---|---|---|
| Conventional | -- | 16.5 | 6.5 | −30.5 | 5.5 | -- |
| PSO | ITAE | 31.9084 | 3.8527 | −42.6328 | 2.9207 | 6.3401 |
| OF | 17.2707 | 7.8545 | −49.8979 | 1.8395 | 783.8754 | |
| GBO | ITAE | 81.96074 | 11.082475 | −64.22046 | 5.01357 | 2.7762 |
| OF | 53.66902 | 4.6988 | −37.3261 | 2.51749 | 413.8754 |
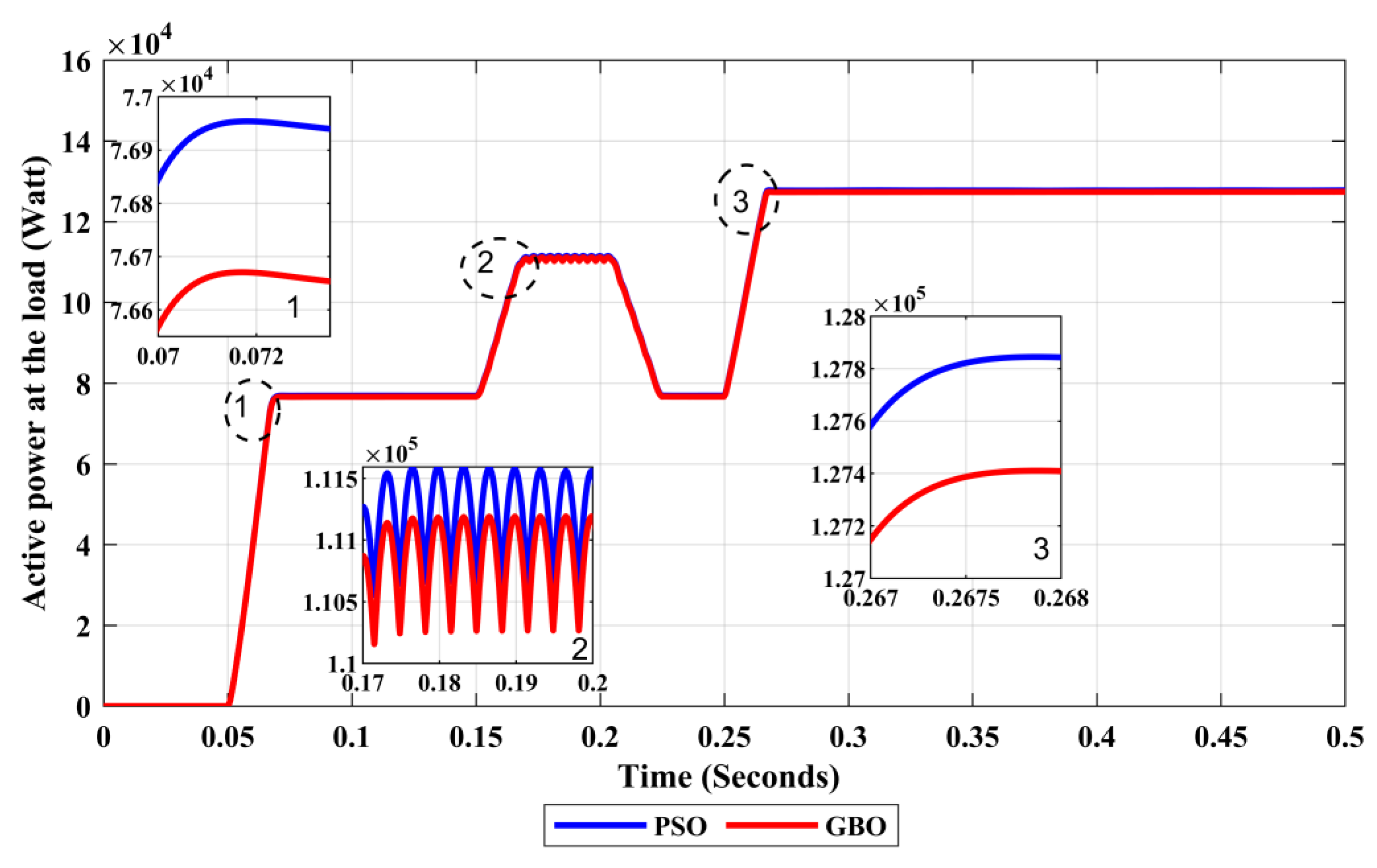
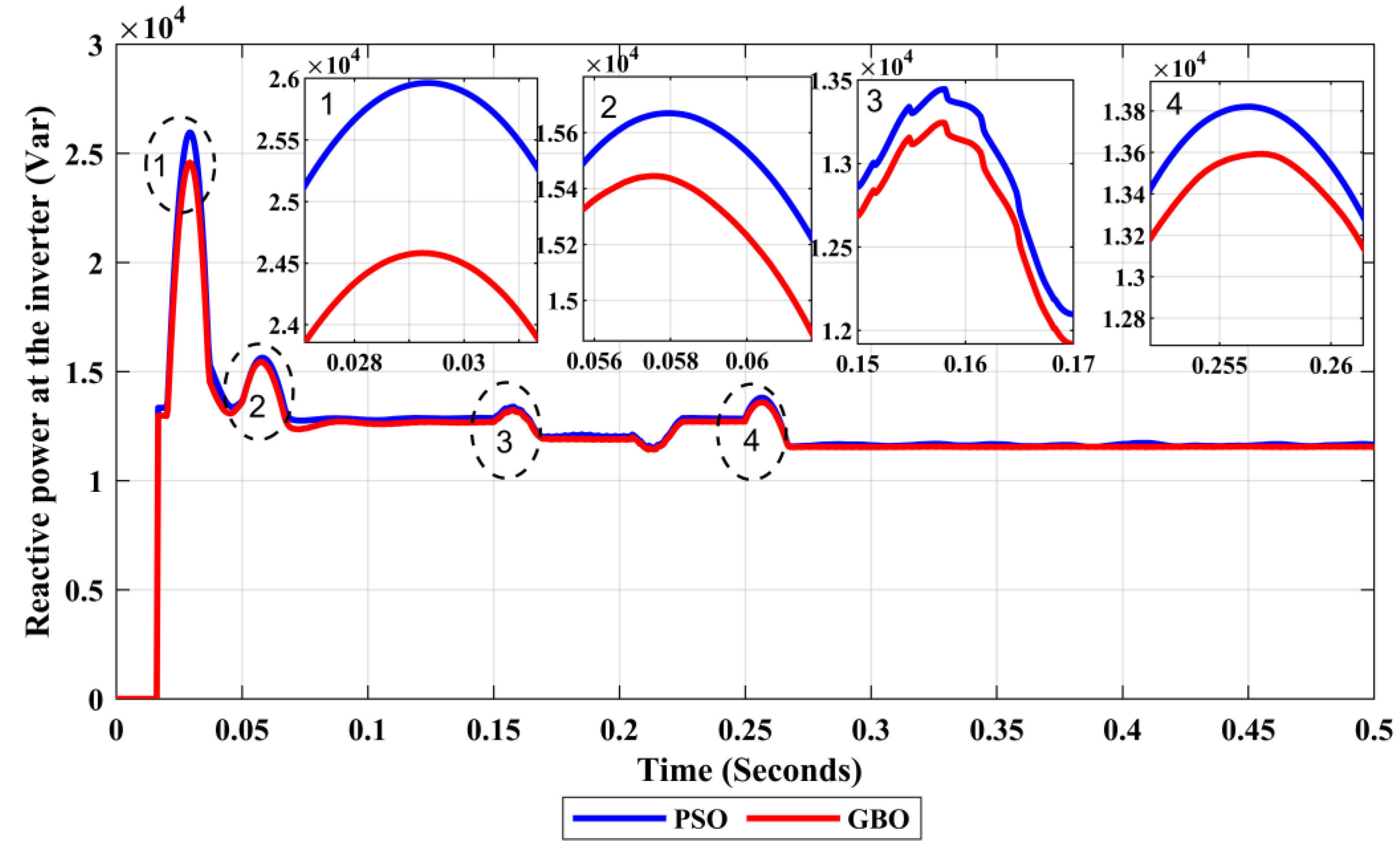
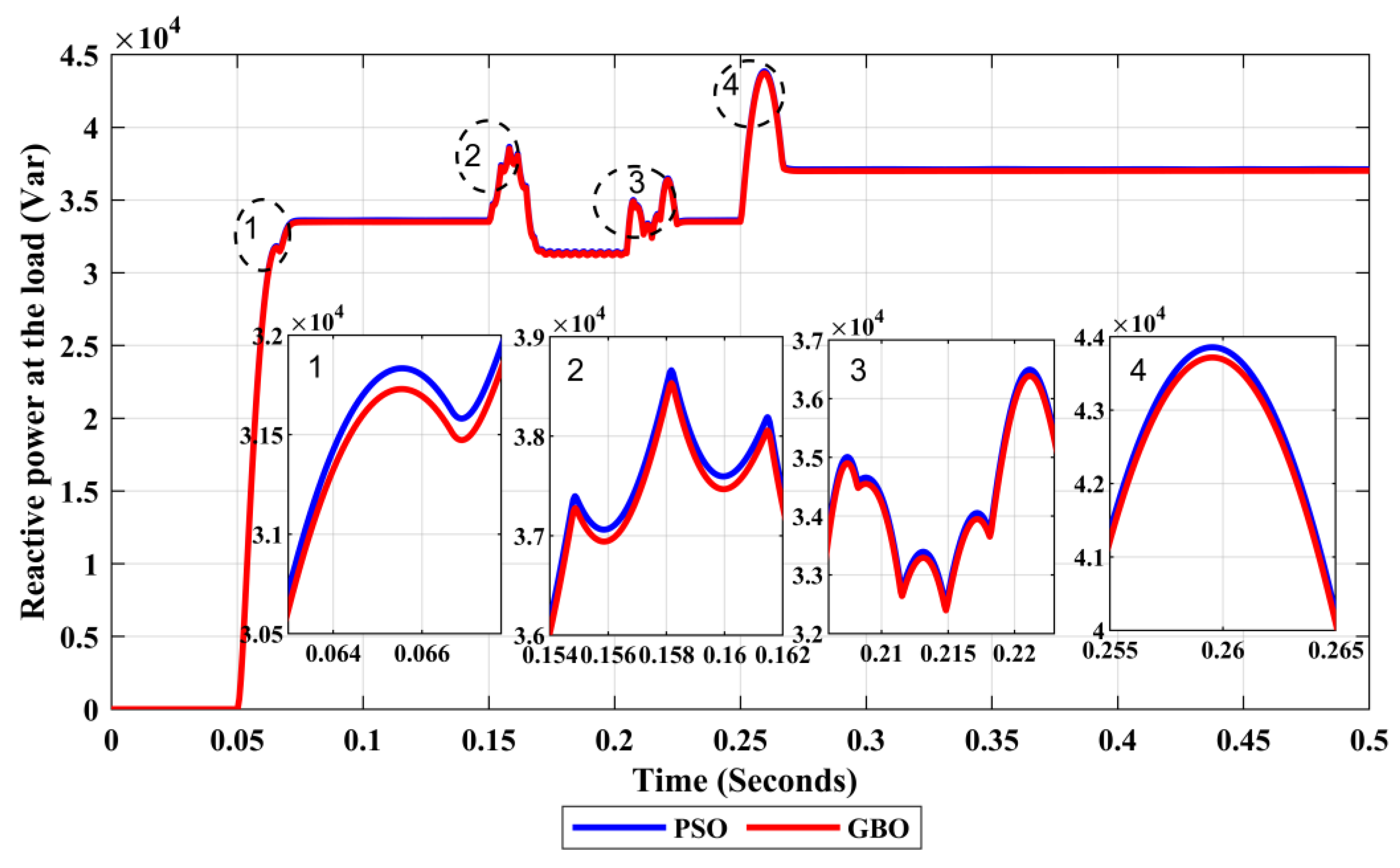
| Subject | Studied Condition | Method | Over-Shoot/Undershoot (%) | Peak Time (s) | Settling Time (s) |
|---|---|---|---|---|---|
| PV Active Power | Inset of Linear Load 1 | PSO | 35.6207 | 0.5166 | 0.5194 |
| GBO | 29.8195 | 0.5123 | 0.5166 | ||
| Inset of Nonlinear Load | PSO | 58.9623 | 1.5257 | 1.5268 | |
| GBO | 57.50732 | 1.51961 | 1.5207 | ||
| Inset of Linear Load 2 | PSO | 33.8506 | 2.5827 | 2.6408 | |
| GBO | 31.5634 | 2.5374 | 2.5709 | ||
| PV Reactive Power | Inset of Linear Load 1 | PSO | 29.8249 | 0.5354 | 0.54627 |
| GBO | 29.5341 | 0.53102 | 0.5385 | ||
| Inset of Nonlinear Load | PSO | 38.8501 | 1.5361 | 1.5459 | |
| GBO | 37.9556 | 1.52968 | 1.5456 | ||
| Inset of Linear Load 2 | PSO | 15.1476 | 2.5216 | 2.6412 | |
| GBO | 13.2463 | 2.51860 | 2.57921 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Altbawi, S.M.A.; Mokhtar, A.S.B.; Khalid, S.B.A.; Husain, N.; Yahya, A.; Haider, S.A.; Alsisi, R.H.; Moin, L. Optimal Control of a Single-Stage Modular PV-Grid-Driven System Using a Gradient Optimization Algorithm. Energies 2023, 16, 1492. https://doi.org/10.3390/en16031492
Altbawi SMA, Mokhtar ASB, Khalid SBA, Husain N, Yahya A, Haider SA, Alsisi RH, Moin L. Optimal Control of a Single-Stage Modular PV-Grid-Driven System Using a Gradient Optimization Algorithm. Energies. 2023; 16(3):1492. https://doi.org/10.3390/en16031492
Chicago/Turabian StyleAltbawi, Saleh Masoud Abdallah, Ahmad Safawi Bin Mokhtar, Saifulnizam Bin Abdul Khalid, Nusrat Husain, Ashraf Yahya, Syed Aqeel Haider, Rayan Hamza Alsisi, and Lubna Moin. 2023. "Optimal Control of a Single-Stage Modular PV-Grid-Driven System Using a Gradient Optimization Algorithm" Energies 16, no. 3: 1492. https://doi.org/10.3390/en16031492