1. Introduction
The harmonics introduced by inverter-based renewable generation mean that transformers are being operated at voltages with a high level of high-frequency harmonic content [
1]. This creates a need for accurate wideband equivalent-circuit transformer models that represent the expected transfer function characteristics under these operating conditions, especially for simulation studies aimed at characterizing system behavior. Additionally, being able to model transformer responses during transient conditions allows for early detection of failure and electrical faults using techniques such as Frequency Response Analysis (FRA) [
2]. Aguglia [
3] highlights that a model with good parameter accuracy is important to a transformer designer, while for control purposes, an accurate mathematical model relating the input to the output of a system is sufficient.
High frequency modeling of transformer windings ideally requires distributed winding models. These models are, however, commonly approximated using lumped-parameter equivalent circuit models, and the topologies of these lumped parameter models have been studied extensively in literature [
4,
5]. Various methodologies have been proposed for estimating the parameters of wideband transformer models. Keyhani [
4,
6] performed maximum likelihood estimation on a six-section transformer winding model and concluded that unique solutions can only be estimated if the initial values are close to the target values, or if sectional voltage measurements were included. Brozio [
5] used a constrained Sequential Quadratic Programming (SQP) optimization algorithm to estimate the parameters of a two-winding power transformer from measured frequency responses. Time-domain signals were not employed due to computational limitations, and the overall simplicity of representing the frequency responses analytically. In a more recent contribution, Chanane [
7,
8,
9] applied metaheuristic optimization algorithms, such as Particle Swarm Optimization (PSO) [
10], Crow Search Optimization (CSO) [
11], and Grey Wolf Algorithm (GWA) [
12], to estimate the parameters of a fully interleaved continuous-disc winding. The parameter estimation process was simplified by making use of measured values for the DC resistance, equivalent inductance, and effective capacitance of the transformer winding.
Empirical Mode Decomposition (EMD), proposed by Huang, represents a methodology for decomposing a multi-modal signal into simpler components known as Intrinsic Mode Functions (IMFs), which can be used to extract features from nonlinear and non-stationary waveforms [
13,
14]. Alternative noise-assisted EMD methods, such as Ensemble Empirical Mode Decomposition (EEMD) and signal masking techniques, have been subsequently proposed to address the issue of mode-mixing [
13,
14,
15]. EMD and variations thereof have been used extensively in literature for transformer vibration analysis [
16,
17,
18,
19]. No existing research applies EMD in the parameter estimation of transformer winding or complete transformer models.
This paper investigates the use of EMD for estimating the parameters of a three-section lumped-parameter transformer winding model. The main research objective of the work is to explore how the classical parameter estimation methodologies can be amended to incorporate EMD, and whether EMD can improve the performance of these approaches. As a second objective, the work investigates the performance of the Pseudo-Random Impulse Sequence (PRIS) [
20,
21,
22] for the parameter estimation of transformer models.
The model is perturbed using a PRIS, and the simulated time-domain voltage waveforms of the winding are decomposed into IMFs. A novel approach is proposed to derive the cost function from these IMFs, the approach is further expanded to investigate weighting of the derived intrinsic modes. The accuracy of the estimated model parameters is interpreted by comparing the impulse responses of the targeted and estimated models in addition to consideration of classical error metrics.
This paper is structured as follows. In
Section 2, the transformer winding model used for the study is presented together with its analytical input impedance frequency response.
Section 3 presents the PRIS source used to perturb the transformer winding.
Section 4 discusses the parameter estimation methodologies being applied. The different cost function formulations used for the parameter estimation algorithm are presented in
Section 5.
Section 6 presents the results obtained from the different parameter estimation approaches. Additional analysis and results are also presented to provide insight into the results. The paper is concluded in
Section 7 with recommendations for further research.
4. Parameter Estimation Methodology
The parameter estimation approaches target the parameter vector given in (
3), where the parameters are normalized by applying the normalization constants given in (
4). The optimization bounds for parameters other than the coupling coefficients are chosen to be an entire order of magnitude so as to assume little a priori information about the parameter values. The coupling coefficient bounds are selected close to unity to reflect the assumption of a well designed transformer [
26].
Table 2 summarizes the bounds of the search space adopted in the investigation.
Figure 4 and
Figure 5 present an overview of the parameter estimation strategies implemented in the investigation. In simulation, the target model is perturbed using a PRIS source [
20]. In practice, it cannot be guaranteed that the time-domain samples obtained from the device under test align perfectly with the samples obtained through simulation of the estimated model. Two strategies to align these time-domain waveforms are considered. The first strategy, as presented in
Figure 4a and
Figure 5a, uses the sampled input current,
, produced during the target model perturbation as an input to the estimated model. The second strategy, as presented in
Figure 4b and
Figure 5b, simulates the target and estimated model PRIS perturbation arrangements separately, and then aligns the waveforms by aligning the bipolar PRBS voltages produced by the H-Bridge,
, in each simulation.
The initial studies considered various optimisation algorithms, including interior-point, patternsearch, particle swarm and genetic algorithm. The particle swarm optimization algorithm, which is a global solver that generates a population of points to find a global minimum in a widely bounded search space, is used throughout the investigation [
8]. The algorithm is chosen based on the assumption that limited a priori knowledge is available on the model parameters to be estimated and the superior runtimes in comparison to the genetic algorithm. The algorithm runs 250 search iterations, with a population of 1000 points generated using a random seed. After the global optimization procedure is completed, the optimization results are refined using a local solver, fmincon. The classical time-domain approach to parameter estimation, whereby the measured output voltage waveforms from the target and estimated models are compared and used in a cost function formulation, is presented in
Figure 4.
Figure 5 presents the proposed EMD approach, whereby the time-domain voltage waveforms are first decomposed into IMFs, from which the cost function is derived. Cost functions defined in terms of both Root Mean Squared Error (RMSE) and correlation coefficient (
) based metrics are implemented for all approaches.
Three implementations of modal decomposition are investigated. The first performs standard EMD on the target model and estimated model voltage waveforms, and formulates the cost function in terms of the resulting IMFs and residuals. The second computes inferred IMFs to represent the estimated model, from which the cost function is derived. The third derives the cost function from weighted inferred IMFs to represent the estimated model.
6. Results
Table 3 presents the results of the frequency-domain parameter estimation investigations, while
Table 4 presents the results of the parameter estimation investigations that utilise the time-domain, EMD and IEMD waveforms. The results are presented as parameter error percentages, where the error (err%) of the respective parameters is calculated using the relationship
where
denotes the final estimated parameter value and
denotes the target value of the parameter, as presented in
Table 1.
The frequency-domain RMSE based optimization yields errors below 10% for all parameters aside from
. Parameter
does not influence the cost function significantly, as it predominantly affects the damping at the resonant points of the frequency response. In considering
Table 3 and
Table 4, it is observed that the run times of frequency-domain parameter estimation, in most cases, are longer compared to time-domain and modal decomposition based approaches. This is attributed to the need for longer simulation times to obtain a high frequency resolution over a wide frequency band.
It is clear from
Table 4 that cost functions using the EMD approach are not able to obtain parameters as accurately as the classical time-domain approach. This is attributed to the content within each IMF being dependent on the dynamics present in the original signal. EMD does not guarantee the presence of specific modes within a specific IMF. Although the presence of certain modes within the estimated waveform may be correct, it cannot be predicted which IMF these will be decomposed into. This characteristic makes the optimization challenging when only comparing the
IMF of the target with the
IMF of the estimated waveforms. The EMD approach is thus very sensitive to minor changes in the time-domain waveforms, thereby making the search space extremely stochastic, as shown in
Figure 8.
Figure 8,
Figure 9,
Figure 10 and
Figure 11 present graphical representations of some of the search spaces. The figures are created by incrementally moving the parameter away from its target value by 0.2%. The search spaces are one-dimensional, meaning that each parameter is varied individually whilst all others are kept at their target values. For legibility purposes
Figure 8,
Figure 9,
Figure 10 and
Figure 11 show the cost function as
,
,
and
are varied.
Figure 8 shows the search space of
generated using the first alignment strategy, but this stochasticity is typical of all of the search spaces generated using the EMD approach.
The RMSE based cost functions using the first alignment strategy for the classical time-domain and IEMD methodologies converge to the same parameter values. This is attributed to the search spaces being very similar with slight differences in amplitude. The IEMD approach does, however, provide a noticeable improvement in runtime, as well as lower error percentages when comparing the results of the second time-domain alignment strategy. The IEMD search space of the NRMSE based cost function,
, using the first alignment strategy is shown in
Figure 9. The lower parameter errors obtained through the time-domain and IEMD approaches, in comparison with the EMD approach, can be attributed to the overall downward trend in the cost function as the parameter values range closer to the target model parameters in
Figure 9, as opposed to the stochastic search space shown in
Figure 8.
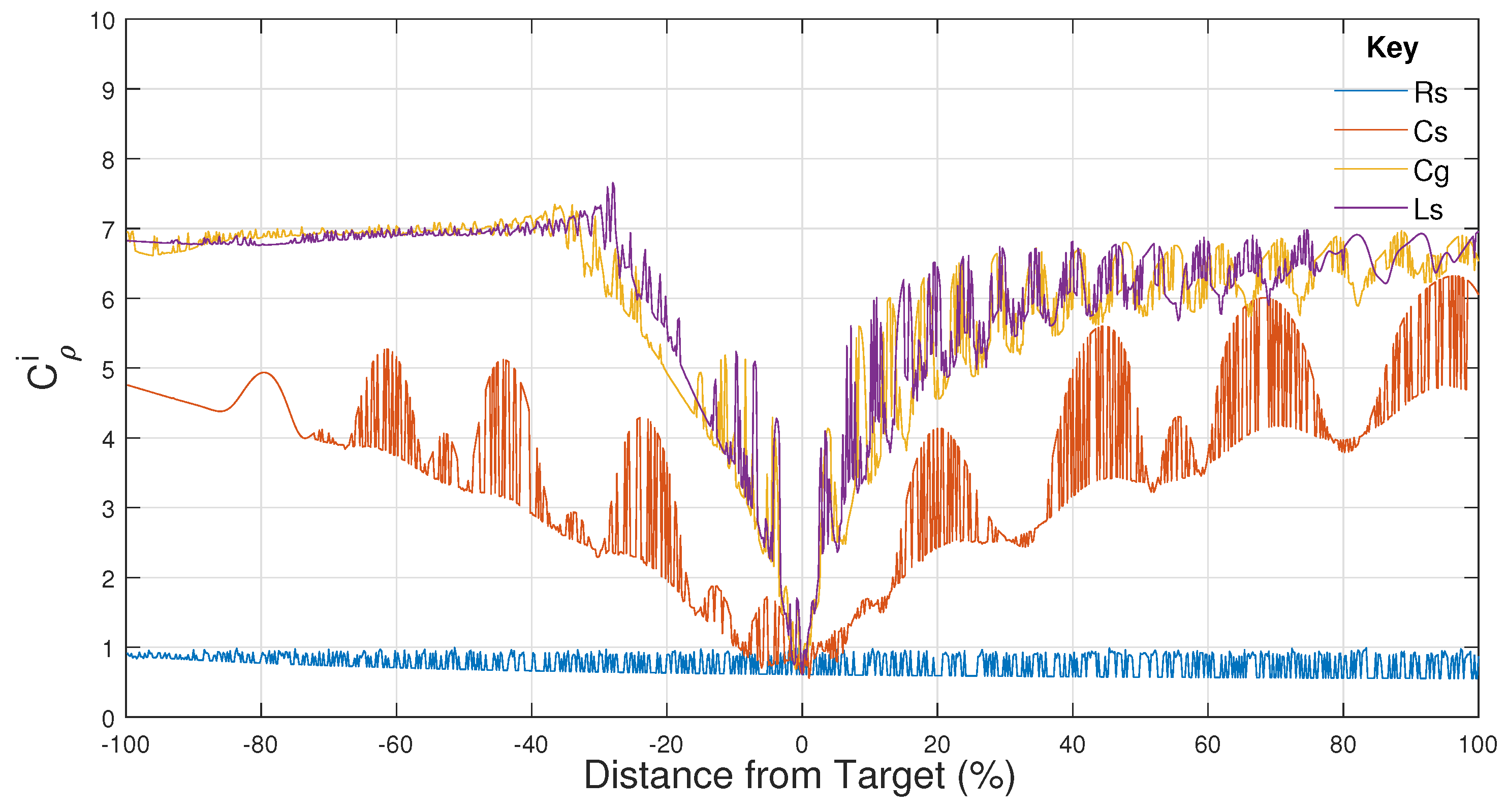
In the case of correlation coefficient based cost functions, the time-domain and IEMD approaches converge to different results, where the IEMD approach obtains parameter values with lower error percentages in alignment strategy 1. This can be attributed to the correlation based cost function formulations
and
producing different search spaces, where the IEMD search space of alignment strategy 1, shown in
Figure 10, places equal emphasis on all modes of the system. The weighted IEMD approach is introduced to investigate whether using different combinations of target IMFs and estimated iIMFs can assist in improving the parameter estimation results. This investigation is limited to binary weights that either include or exclude certain IMFs and iIMFs from the cost function formulation. The parameter estimation procedure is executed for all possible weighting combinations for the vector
. The best result is presented in
Table 5.
The best results for alignment strategy 1 are obtained with
, whilst the best results for alignment strategy 2 are obtained with
. The weighted IEMD approach cycles through all possible weighting options and completes the parameter estimation procedure for each option. The runtimes are, therefore, significantly longer in comparison with the approaches presented in
Table 3 and
Table 4. In comparison with the error percentages achieved with the correlation coefficient based IEMD approach, there is improvement in the resistive, inductive, and coupling elements of the model using alignment strategy 1, by only including the higher order dynamics of the first and second IMF. Alignment strategy 2 yields no significant improvement in the individual parameter error percentages by comparing only the 2nd, 4th, and 6th IMFs and iIMFs. The search space in
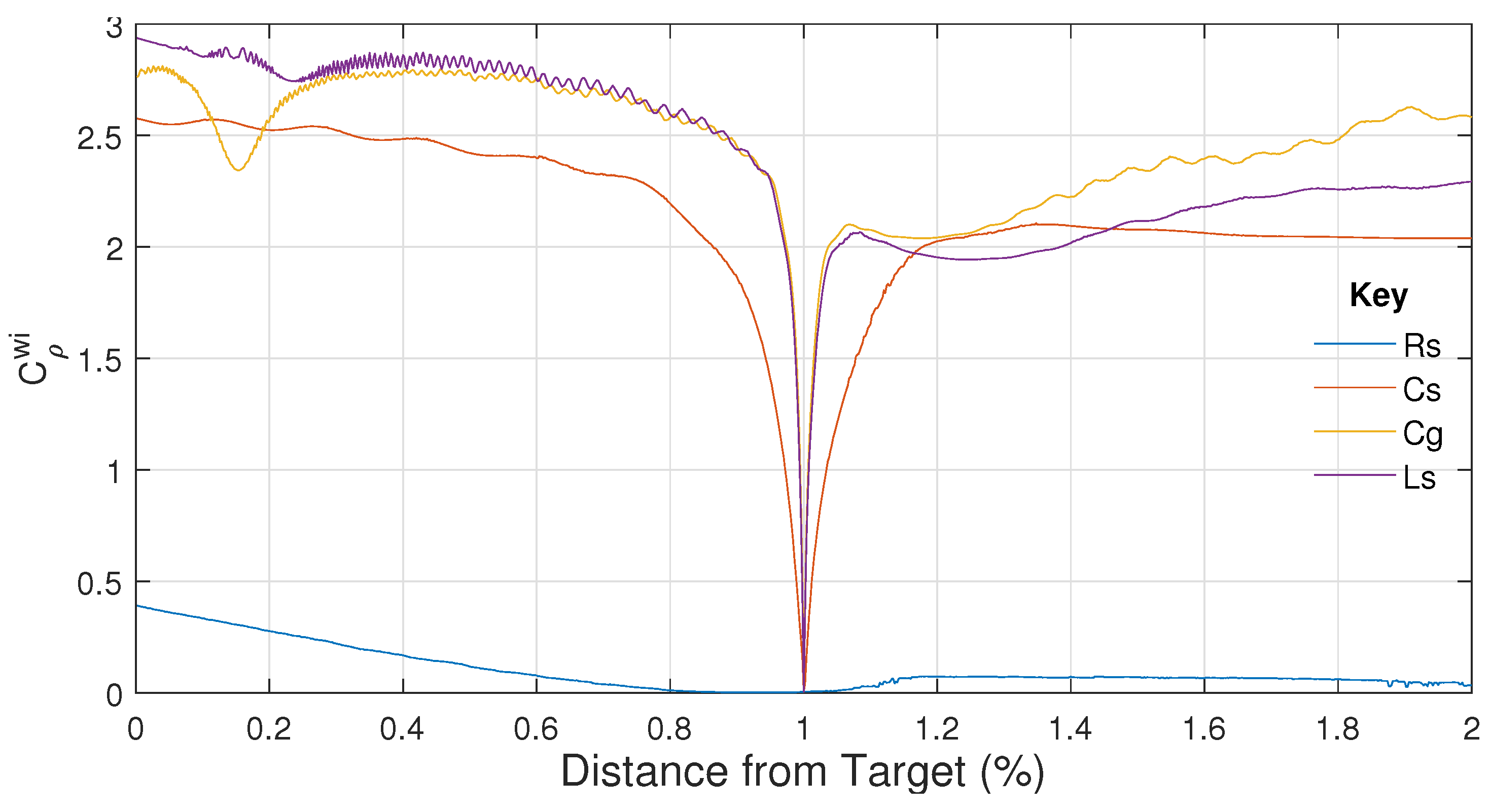
Figure 11 is generated using the weighted IEMD approach cost function formulation for time-domain alignment strategy 2.
Figure 11 is less stochastic compared to the search spaces generated using alignment strategy 1. The stochasticity of the previous search spaces is due to the discretized time-domain current waveform subsequently being used as an input to the estimated model simulation. Due to the discretization of the current waveform, the simulated input current to the estimated model contains less frequency content compared to the simulated current waveform of the target model. Strategy 2 allows the estimated model to simulate the input current over a wider range of frequencies.
As discussed by Keyhani [
6] and Banks [
22], determining unique transformer model parameters cannot be guaranteed when only terminal measurements are available. This is due to the fact that some of the individual parameters may not be fully observable from terminal measurements alone. While obtaining the correct model parameters is important for the condition monitoring of equipment, obtaining a model with a transfer function that is representative of the device under test is adequate for many simulation purposes [
3]. Therefore, in addition to considering the error percentages, the performance of the estimated model is also interpreted by considering the impulse response. Impulse response tests are commonly applied to linear dynamic systems in control theory to determine their time-domain properties [
29]. The ideal impulse exhibits a flat frequency response magnitude across the entire frequency spectrum, and the impulse response represents the transfer function of the system in the time domain. The impulse response waveforms of the target and estimated models are generated through the inverse Laplace transform of their analytical input impedance transfer functions. The waveforms produced by the target model and the estimated model are compared through an RMSE metric, and the results are presented in
Table 6.
With respect to the results presented in
Table 4,
Table 5 and
Table 6, it is clear that the lowest individual error percentages do not always guarantee the most accurate impulse response compared to the target model. For example, the RMSE-based cost function formulation of the time-domain and IEMD approaches using strategy 1 yields the lowest individual error percentages. However, in terms of the impulse response test, the estimated models obtained from the RMSE frequency-domain, correlation coefficient IEMD, and weighted IEMD approaches reproduce the dynamic modes of the target model more accurately. No significant improvement in parameter error percentages is achieved when applying the weighted IEMD approach compared to the IEMD approach when using alignment strategy 2. The impulse response RMSE metrics, however, show significant improvement. This is an indication that the model obtained through the weighted IEMD approach represents the transfer function dynamics of the target model more accurately. This can be due to combinations of various parameters affecting the transfer function, rather than the values of individual parameters. It is also possible that not all parameters influence the model’s response equitably, with some parameters influencing the overall response in the frequency range of interest more than others. It is clear from
Table 6 that the weighted IEMD approach using time-domain alignment strategy 2 produces the lowest RMSE, highlighted in green. It can, therefore, be concluded that this approach produces transfer function dynamics most similar to the target model.
The best impulse response results for the different alignment strategies seem to differ, and it is therefore not possible to form a general assumption as to which alignment strategy is preferred.
7. Conclusions
This paper explores the use of EMD to estimate the parameters of a three-section transformer winding from time-domain waveforms obtained whilst applying a PRIS perturbation signal. A novel approach is proposed for deriving the cost function from the IMFs.
The results show that making use of standard EMD hinders the optimization procedure and that some pre-processing of the IMFs is required to arrive at a successful result. Using the target model IMFs and removing them from the estimated model voltage waveform to create iIMFs produced similar results to time-domain parameter estimation approaches. The results are cross-validated through calculating the impulse response of the target model and estimated model for each approach. It is shown that the inclusion of a weighting vector that includes only certain iIMFs in the correlation coefficient cost function improves the impulse responses, and therefore the overall transfer function accuracy, of the estimated model. It is shown that the most accurate set of model parameters does not provide the most accurate impulse response, and, therefore, should not be the only metric of the accuracy of a model when transfer function characteristics are the main consideration.
The research introduces a methodology for determining the optimal IMF weighting vector by cycling through all possible combinations. The methodology proves the application of modal decomposition in the parameter estimation of transformer winding models. Improved modal decomposition methodologies such as Ensemble Empirical Mode Decomposition (EEMD) and Iterative Filtering should be investigated as potential options for further improvements to the methodology. EEMD, however, introduces a significant additional computational burden. Determining the optimal weighting vector is, however, time consuming. There is therefore scope to investigate other methodologies for determining a set of weighting vectors that improves the parameter estimation results obtained from the EMD approach. In this work, the weighting vector is limited to binary values of either 0 or 1 in order to decrease complexity. Other weighting values should be investigated.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}