The output expression of the PID controller is,
where,
,
,
correspondingly indicate the proportional constant, integral constant, and derivative constant. The term
with the hypothesis that
shows that the control is proportionate to the error at any given moment and is a function of the current error value. When the error is significant, so is the control signal. When the system noticeably deviates from the objective, the control makes no adjustments to bring it back to its initial state.
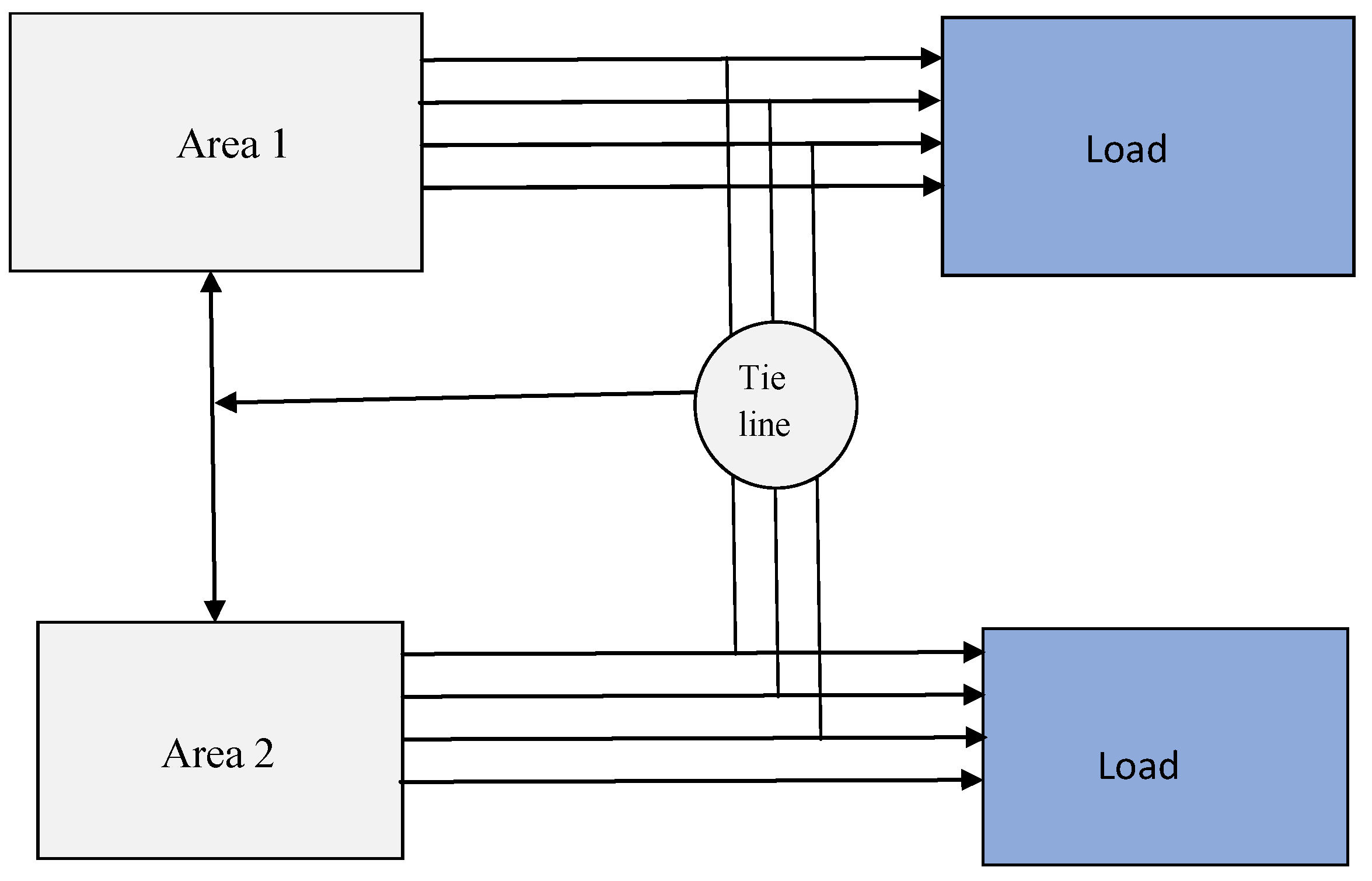
The derivative term describes how the rate of change in error affects system control. As a result, the derivative term is determined by future error values. In setting its control value, the PID controller takes into account past, present, and future errors. To sustain the target frequency of the system and reduce power fluctuations, the suggested PID controller model employs a secondary control approach known as AGC, which includes tie-line power flow regulation. AGC is generally used for raising or lowering the generator power outputs in two-area power systems.
3.2.1. Automatic Generation Control
The proper tuning of PID parameters is required for the improved operation of the power system under various operating modes. The model’s uncertainty and dynamic fluctuations are intended to be addressed by fine-tuning the PID controller’s settings. The power system must be extremely sensitive to load fluctuation variations and maintain the predicted point for all parameters [
45]. ITAE is determined to be the one that provides good results for parametric optimization concerning overshoot and settling time, out of a variety of performance indices that measure the efficacy of power systems [
30]. Accordingly, ITAE is regarded as the objective function to be reduced in the proposed study, and the expression of ITAE in a two-area power system is expressed as,
where
is the variation in tie-line power,
indicates the variation in frequency corresponding to area 1, and
represents the variation in frequency corresponding to area 2. The proposed BESSO optimization approach for determining the PID controller parameters minimizes the objective function ITAE.
The constraints to be maintained are,
Furthermore, for a two-area power system, the differential equation of a PID controller becomes,
For the proposed model, it is obvious from Equations (11) and (12) that ACE is dependent on frequency change and the power through the tie-line. With ACE as the input to the PID controller, the parameters of which are optimally tuned via the suggested BESSO algorithm to regulate the deviation in tie-line power and frequency.
Figure 3 shows the Simulink implementation of the proposed two-area power system.
3.2.2. Overview of Proposed BESSO Algorithm
The proposed work presents a heuristic-based new hybrid optimization technique for automatic LFC of two-area multiple-source power systems. The proposed intelligent strategy makes use of the main features of two different optimization strategies, such as the BaEO and the SpSOA. This hybrid technique is used for the parametric tuning of the PID to normalize the fluctuations in power systems. The PID is one of the most widely used controllers and is ubiquitous in today’s modern industries. Moreover, it is widely applicable in systems with single-input and single-output systems. The majority of typical optimization methods have features centered on the organisms’ food-seeking tendencies, implying a dynamic nature in dealing with convergence difficulties. The dynamic properties linked with the traits of bald eagles and sparrows are used in the proposed BESSO method to tackle the convergence issue.
In other words, the capacity of sparrows to defend themselves against predators is inherited from the fearless nature of bald eagles while attacking prey [
46]. When opposed to single optimization techniques, which often result in local optimum solutions, this improves the algorithm’s capacity to obtain the global optimal solution with a higher convergence rate. In comparison to previous approaches, the proposed BESSO algorithm has a lower computational cost. The BESSO algorithm’s operating concept consists of three key phases of operations: selection, search, and prey. These steps are critical for obtaining consistently good results and identifying an all-around ideal solution. In terms of the objective ITAE, the proposed BESSO algorithm beats existing solutions. The necessary parameters of the BESSO algorithm are first defined, and then the training and test phases are executed. The fitness function is then configured, and each search agent’s fitness measure is determined. The optimal parameters are found by applying the BESSO method to optimize the PID controller’s settings. The algorithmic procedure of the proposed BESSO algorithm is explained below,
Step 1: Objective function: The proposed BESSO method aims to reduce the ITAE measurement to the smallest possible value. The PID settings are fine-tuned by minimizing the objective function. The proposed optimization problem’s objective is expressed as, Min (ITAE).
Step 2: Parameter and Population initialization: The parameters and the numbers of bald eagles are initialized in the next step. In addition, the maximum number of iterations is initialized. Each bald eagle takes a position vector indicating the current position as,
where
indicates the total bald eagles in the search space that varies from
and
is the
search agent. The fitness of each bald eagle is stored as,
Each bald eagle’s fitness values are kept in the form of the above expression, which aids in determining the survival of the fittest throughout the whole population.
Step 3: Update of Position: The bald eagles’ location may be updated using three different operations, such as the selection phase, the searching phase, and the phase of prey.
Phase 1: Selection phase: The bald eagles choose the search area at random and then evaluate the prey to choose the optimal location. At this step, the leader bald eagle’s position is mostly assessed using a priori knowledge and location-changing characteristics, which are stated as,
where,
is the location of the
bald eagle search agent at
iteration.
represents the control constraint for variation in location changing from 1.5 to 2,
β is the random variable that changes inside the limit
,
is the best-ever location attained by the bald eagles,
signifies that the eagle search agents use all of the information from previous placements.
Phase 2: Searching phase: The spiral movement of the bald eagles improves the pace of the search and determines the best dive capture position. Based on this operation, the bald eagle search agents’ position is described as,
where
is the polar angle of the spiral equation and
is the polar thickness of spiral formulation,
indicates a parameter that concludes the searching cycles and lies between 0.5 and 2,
Rand is a random variable that changes from 0 to 1, and
and
are the polar coordinates of the bald eagles.
Phase 3: Phase of Prey: The bald eagle search agents dive fast from the most excellent position in the search area towards the target prey, and the rest of the search agents follow suit and attacks them. At this point in the procedure, the situation is stated as follows,
where,
and
are the intensity of exercise in bald eagles to the best and center location, and holding the measure in the range
. The sluggish pace of convergence and the danger of becoming caught in the local optimal solution are the algorithm’s key limitations, despite the fact that this technique only requires a few parameters to be set. As a result, the features of bald eagles are inherited together with those of sparrows, resulting in a faster rate of convergence and a worldwide optimum solution. The versatility of sparrow traits in engineering sectors [
47] is one of the reasons for their adoption. The ability to defend against predators is a key property of sparrows, and it is inherited from the features of bald eagles in the suggested technique. The sparrows’ location can be adjusted as follows:
where
is the control parameter associated with step size,
is the location of the sparrow at
iteration,
is the current global optimum location of the sparrow. Finally, the hybrid sparrow and bald eagle’s position is established as follows, based on the traits of the sparrow and the bald eagle, with equal consideration given to both features,
Step 4: Arrangement of solutions: The bald eagles are ordered according to their fitness measurements, with solutions with lower fitness levels being ignored. The present solution is replaced with the one that has the best fitness measure. Otherwise, the old solution continues to be the best option.
Step 5: Termination: The method is finished when the maximum number of iterations has been completed and the best solution has been found.
Table 1 shows the pseudocode of the proposed BESSO optimization algorithm.
Figure 4 shows the flowchart of the proposed model.
Table 2 shows the notation and description of the proposed system.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}