1. Introduction
Power systems are undergoing a major “de-carbonization” transition from fossil fuels to alternative energy sources, and this dramatic change will drive the whole socio-economic development system into low-carbon mode [
1]. The transition to a low-carbon power system requires a significant increase in renewable energy. However, because of the intermittent and uncertain nature of alternative energy, new energy generation will more easily lead to great pressure on stability and reliability of modern power systems [
2]. The randomness and dynamic complexity of wind power output have a great effect on the transient stability of a power system. For example, in the power failure in South Australia in 2016, a wind turbine tripped due to continuous voltage interference, which caused power failure of the whole system [
3].
Transient stability represents the ability of generators to maintain synchronization in a power system after contingencies, which is the most popular stability rule [
4]. In practice, in order to enhance transient stability, control strategies can be divided into preventive control (PC) and emergency control (EC) according to the different implementation time. Preventive control, such as optimal scheduling of generator sets, aims to prepare the system before unexpected events occur. Emergency control, such as load shedding, is to try to avoid loss of synchronization of a power system after contingencies [
5].
The existing classical transient stability research is mainly focused on simulation models. Furthermore, the time domain simulation (TDS) method based on engineering experience has been widely applied in industries [
6,
7,
8]. This method has the disadvantage of a large amount of computation. Another method is to terminate time-domain simulation in advance and determine the criteria for premature termination according to the characteristics of transient stability [
9]. However, these rules are only enhanced on the basis of direct methods for transient stability analysis [
10,
11] including instantaneous energy function (TEF) method [
12,
13], extended equal area criterion (EEAC) method [
14], and trajectory concave-convex method (TCC) [
15].
Artificial-intelligence-based algorithms have also been used for transient stability forecasting. In [
16], the authors developed an improved decision tree (DE) for dynamic test by synchronous phasors. In the literature [
17], lasso regression (LR) was applied to forecast stability interval. In [
18], voltage, speed, and power angle of generator were used by support vector machine (SVM) to forecast transient stability index (TSI). In [
19], first-order regression was used to investigate system uncertainty variables. Extreme gradient boosting (XGBoost) and factorization machine (FM) were applied for transient stability assessment of power systems [
20]. Improved SVM was used for online system assessment [
21]. Further, [
22] proposed a novel l deep-machine-learning-based model for power system forecasting.
In addition, artificial neural networks (ANNs) have been applied for power systems [
23,
24]. However, the conventional artificial intelligence algorithms are very bounded in their ability to deal with modern power systems. To overcome these problems, deep learning models have been developed and applied to many fields. For example, in the literature [
25,
26,
27,
28], stack denoising autoencoder (SDA), convolutional neural network (CNN), and reinforcement learning (RL) have been applied to transient stability prediction. However, when it comes to transient stability analysis, the performance of these conventional algorithms will be weakened because the specific topological structure of the system data and information transfer between bus nodes are ignored.
The best operation dispatch of the system before an accident can be achieved is by optimal power flow calculation considering the transient stability constraint. Therefore, optimal scheduling of the generator set in preventive control is very suitable for stability enhancement of the power system [
29,
30,
31,
32,
33,
34]. The probability of an accident in a power system is low in long-term operation, so the cost of preventive controls will be high. Short-term emergency controls may also be costly, but the probability of implementation is very low. Therefore, cost-effectiveness of emergency controls is also a factor to be considered. In [
35], an optimized load shedding scheme is proposed to improve the transient stability and frequency/voltage stability of a power system. In [
36], in order to improve the transient stability of a system, a risk-based coordination model is adopted to model generation rescheduling and emergency load reduction. However, these studies based on preventive control and emergency control cannot consider uncertainties of alternative energies, such as wind and PV. At the same time, the transient stability control model mentioned above cannot guarantee complete robustness.
From the above literature review, it is clear that the research on transient stability coordinated preventive and emergency control based on the latest artificial intelligence algorithm is still in the initial stage, and there are many theoretical and technical difficulties that have not been solved. For example, the algorithms used in the above research cannot consider the specific data of electric power system topology, node, and information transmission. In addition, some algorithms can lead to a huge amount of calculation, and transient stability forecasting by traditional machine learning methods does not address how to use the prediction results for future control. Even fewer studies have considered cooperative control to improve transient stability.
Considering that the more diversified and generalized alternative energies in a modern system will easily affect the system stability, the existing transient stability research models and optimization algorithms in the literature would not meet future requirements. How to consider both preventive and emergency control has not been well dealt with in the existing models. Some theoretical difficulties, such as global convergence of the optimization scheduling algorithm and stability and robustness of the control algorithm, are still lacking thorough study. Based on the above considerations, this paper will systematically study coordinated preventive and emergency control based on the latest artificial intelligence algorithm.
The proposed paper contributions are as follows:
- (1)
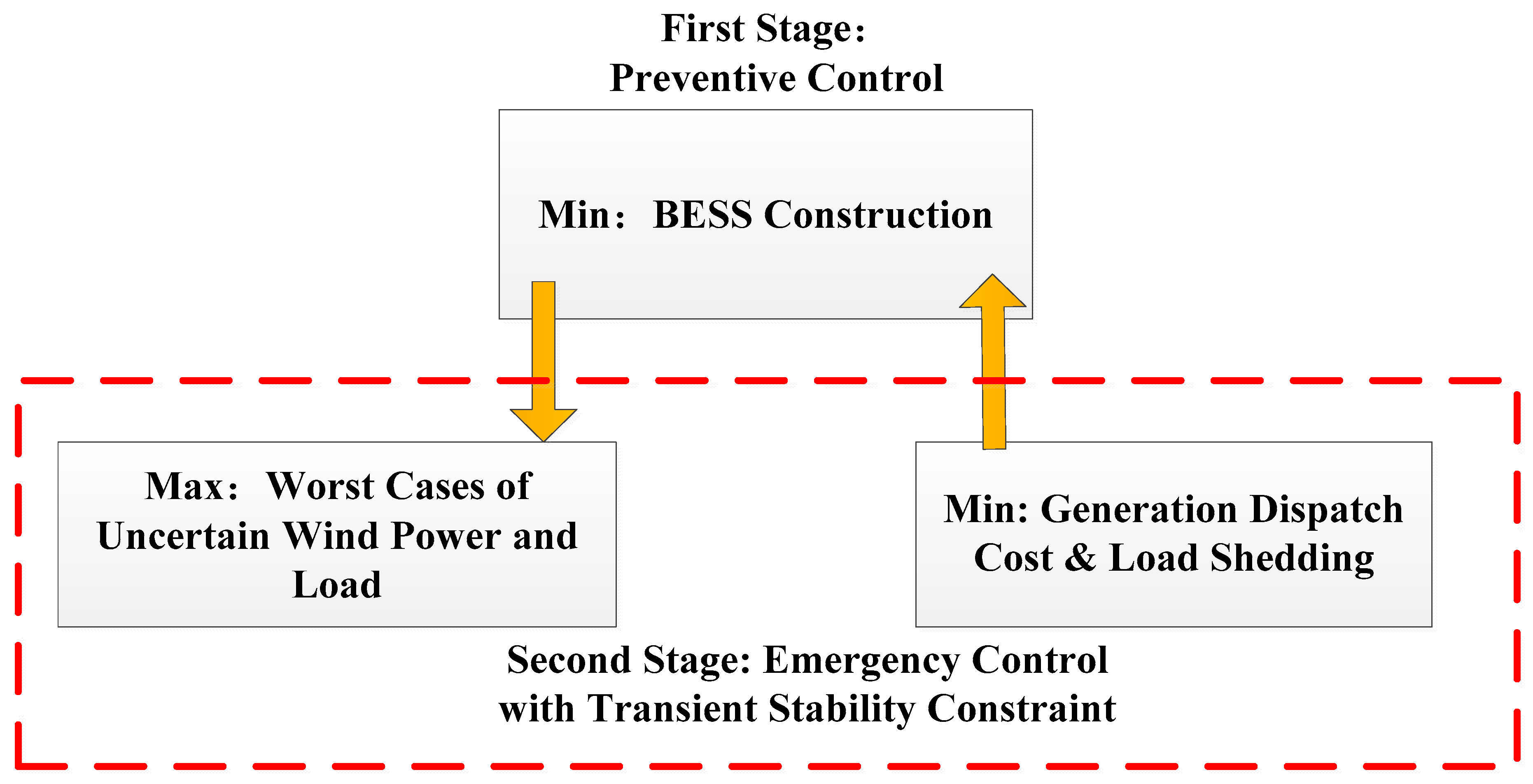
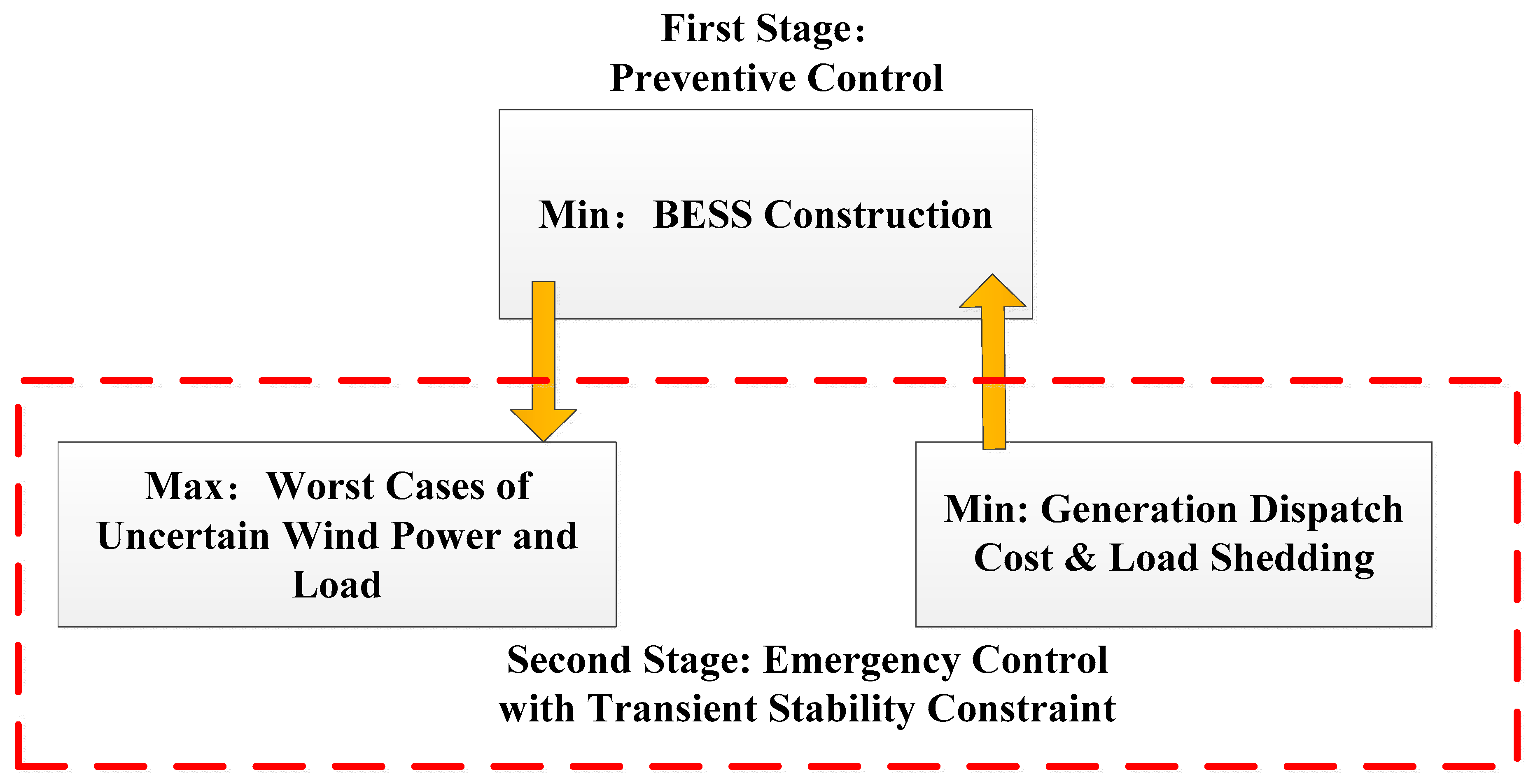
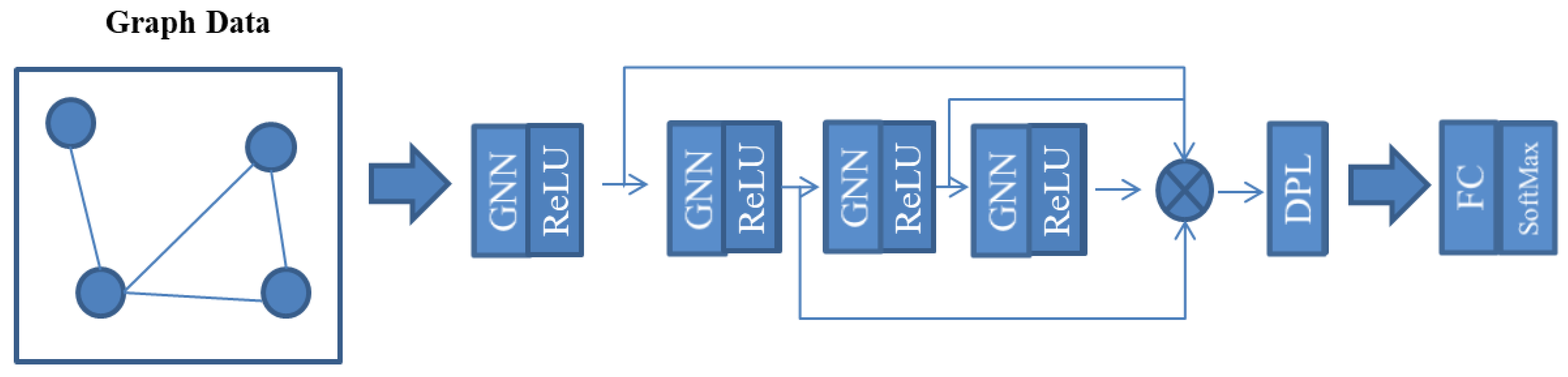
The main theoretical innovation of this paper is that it clearly points out the significant influence of cooperative preventive control and emergency control on system stability and proposes a two-stage robust cooperative control model based on distributed preserving graph representation learning (DPG). According to the worst scenario of the model, transient stability index (TSI) and robust global optimization results can be accurately derived. This idea is obviously different from the existing studies, which only control transient stability and do not pay attention to the special results of the system.
- (2)
The main algorithm innovation is that this paper proposes a modified column and constraint generation (C&CG) [
37] method, which is the traditional C&CG framework combined with deep-learning-based transient stability constraints. This method is our original algorithm and has high theoretical value.
The rest of this paper is organized as follows. The proposed coordinated system control strategy is introduced in
Section 2. The proposed mathematical framework is presented in
Section 3. The solution method is presented in
Section 4. The case studies are developed in
Section 5, and
Section 6 provides the conclusion.
4. Solution Methodology
4.1. Compact Matrix Form
Normally, an adaptive robust optimization model can be solved by C&CG method. However, this paper proposed a novel coordinated preventive and emergency control framework with transient stability constraint. As a result, the traditional C&CG method cannot be directly used. This paper investigated an improved C&CG algorithm that can solve the modified two-stage proposed model.
The compact form of the coordinated transient stability control model can be represented as below:
where
x and
y are the requirement variables and the detailed form can be denoted as follows:
where the requirement variable of the first stage is
x and the requirement variables of the second stage are
u and
y. The minimum problem of the inner layer is equivalent to objective Equation (3), which represents the minimum system operation budget. The expressions of
x and
y are shown in Equation (23). Ω(
x,
u) is the feasible zone of requirement variable
y, and the detailed expression can be described as follows:
Here, variables c1 and c2 are the parameter vectors of Equation (3). A, D, K, F, G, and H are the parameter matrixes of the variables for the corresponding constraints, and e, d, k, h, and u are the constant columns vectors. Equation (24) corresponds to Equations (4) and (5). Equation (25) represents inequality constraints in the developed adjustable robust model, including Equations (7)–(11) and (16)–(18). Equation (26) represents equality constraints in the proposed model, including Equations (6), (12)–(14), (19), and (20). Equation (27) corresponds to Equation (15). Equation (28) shows that, in the proposed model, the values of wind energy and load are the corresponding uncertain values in each time period. Λ1, λ2, λ3, λ4, and λ5 are the dual variables corresponding to each constraint in the lower stage.
4.2. Model Framework Reformulation
In terms of the developed adaptive optimization model, column constraint generation algorithm (C&CG) is used to solve the proposed problem. After decomposition of Equation (22), the main problem can be written as:
where
j is the current iteration;
yl is the solution of the subproblem after the
lth loop.
is the value of variable
in the worst contingence achieved after the
lth loop.
The subproblem can be expressed as follows:
The Equation (22) can be converted into the following dual problem:
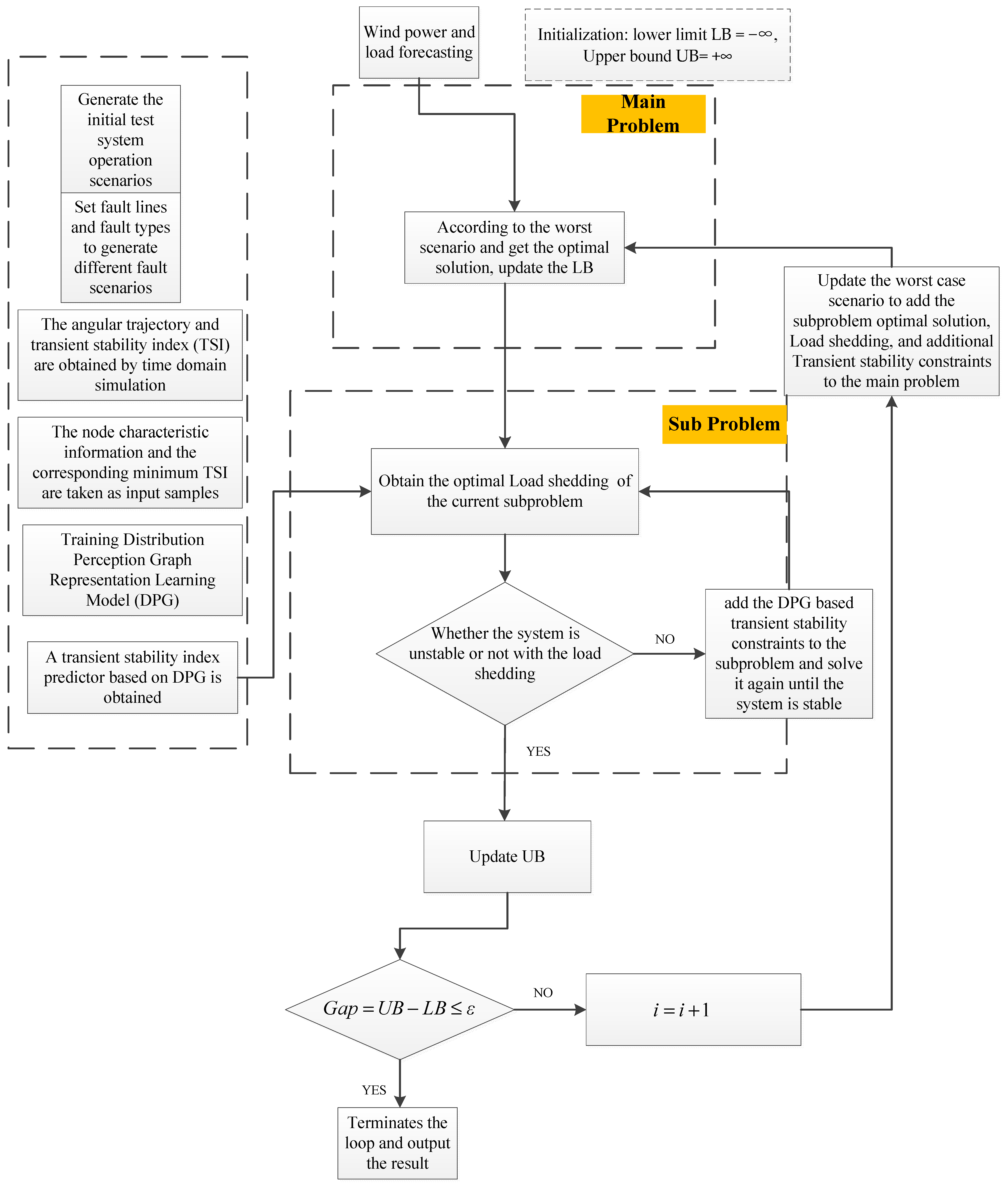
The developed model is finally decoupled into the main problem corresponding to Formulas (29)–(36) and sub-problem corresponding to Formulas (38)–(40) with mixed integer linear form. However, the researched coordinated control model includes transient stability constraint. As a result, the model cannot be directly solved by traditional C&CG method. Therefore, we proposed a novel solution that combines the original C&CG method with transient stability assessment to solve the developed model. The process of the improved solution algorithm is as follows:
- (1)
Given the values of a group of uncertain variables as the initial worst contingence, set the operational cost lower limit LB = −∞, the upper bound UB = +∞, corresponding to the final dispatch scheme, and the iteration number k = 1;
- (2)
Solve the main problem formulas (29)–(36) according to the worst contingence , and obtain the solution (), where the objective equation value of the main problem is taken as the new lower limit LB = ;
- (3)
Substitute the obtained main problem solution into Equations (38)–(40), solve the subproblem, obtain the value of the objective equation of the subproblem, the value of the corresponding uncertainty variable u in the worst contingency, which is , and the second stage variable value of load shedding, which is ;
- (4)
If the system is unstable with the load shedding amount, add the DPG-based transient stability constraint to the subproblem and solve it again until the system is stable;
- (5)
Update the upper limit UB = min {UB,
}, The convergence threshold is ε, If UB − LB ≤ ε, then stop the loop and return solutions
and
; otherwise, add variable
and the following constraints to the master problem:
- (6)
Set k = k + 1; go to step 2 until the method meets the condition of the convergence.
The flowchart of the developed novel solution algorithm including the original C&CG method with transient stability constraints is shown in
Figure 3.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}