1. Introduction
With the increase of power consumption and non-linear loads, power quality issues and contingency management techniques have been a constant challenge for power grid engineers and researchers both for transmission and distribution grids [
1,
2,
3,
4,
5]. Conventional techniques to mitigate contingencies and perform load balance in power systems include network reconfigurations, new investments in transmission/distribution lines, construction of new substations, etc. These actions target technical loss reduction and increases in distribution capacity and reliability but involve high-cost investments.
Distribution grids are traditionally designed with radial topology for unidirectional power flow. However, nearby distribution feeders sometimes are idle, while others are overloaded. Still, radial feeders cannot operate in a permanent loop to take advantage of an adjacent circuit with a lower load, or even with distributed renewable generation (e.g., PV panels), because this change in configuration increases the short-circuit currents and can cause bidirectional power flow. This would require an update in protection schemes and equipment.
The application of power electronics equipment in distribution grids, known as RACDS (Resilient AC Distribution Systems), can provide new management solutions for smarter power flow, load balancing and voltage problems [
5,
6,
7,
8,
9]. These devices allow radial distribution grids to be converted into meshed grids in a controlled and secure way [
10,
11,
12]. Among several options, the compensation approach using series converters has been considered a cost-effective solution [
8,
9,
10,
11,
12,
13,
14] compared to MV back-to-back converters [
15] or Unified Power Flow Controllers (UPFC) [
7] due to its reduced power rating, even though it is not equally flexible. For example, to manipulate a 1 pu of active power, a power electronics converter rated at 2 pu is required with a back-to-back converter, while only 0.2 pu of power electronics is needed with a series converter [
16].
A series medium voltage VSC-based power flow controller has recently been described, modeled and analyzed both in laboratory and in field application [
16], focusing on active and reactive power transfer to improve the flexibility and utilization of meshed distribution feeders. However, a key point, the propagation of harmonics when interconnecting feeders with different voltage distortions, has not been demonstrated.
The harmonic content present in non-linear loads impacts the power quality along the distribution feeders. Traditionally, Series Active Power Filters (SAPFs) are used to compensate for voltage distortions, sags and unbalances (also called DVR—Dynamic Voltage Restorers, when performing the last two functions) [
17,
18,
19], while Parallel Active Power Filters (PAPF) are applied to mitigate current harmonic distortions and power factor compensation.
The use of a series converter to perform harmonic isolation when interconnecting two radial feeders can provide a feature similar to a SAPF [
20,
21,
22]. This can prevent the harmonic content existing in one feeder from propagating to the adjacent feeder when they are connected, indirectly improving the voltage quality. In other words, it keeps the system, from the harmonic point of view, as it was before the interconnection.
The topic addressed here is a current trend and of interest to the scientific community because, in fact, with the increase in the installation of electrical and electronic equipment and power electronics connected to the electrical distribution system, which also come from renewable energies, finding solutions for improving power quality has become a challenge for the power grid.
The fact that a series VSC is able to reproduce a high impedance for harmonic frequencies and a controlled impedance for the fundamental component can be understood in an analogous way to the concept of the Smart Impedance [
23,
24]. This idea was proposed for Shunt Hybrid Active Filters, in which it is possible to tune multiple frequencies simultaneously, providing zero impedance for each harmonic component and a controlled impedance for the fundamental frequency to control the reactive power [
23]. In the series converter presented here, the equipment is tuned to present a high impedance for each harmonic component (to block the harmonics) and a controlled impedance for the fundamental frequency to control active and reactive power flow.
Several control strategies have been used in active power filters for harmonic extraction and current/voltage control [
24,
25,
26,
27,
28,
29,
30,
31,
32]. A well-established harmonic control strategy is based on instantaneous power theory (p-q theory). However, it is known that p-q theory-based harmonic detection algorithms do not perform well under non-sinusoidal supply voltages [
24,
25], which is the case for the application discussed here.
To improve filtering characteristics, compensation algorithms based on the Discrete Fourier Transform (DFT) were presented in [
26,
27]. A DFT window of one fundamental cycle is required for harmonic calculation, which introduces delay in the calculations. Furthermore, adequate synchronization of this window with the fundamental frequency component is needed to avoid errors in magnitude or phase of the harmonics. During transients, this synchronization can be lost and the harmonic cancellation will not be accurate. A tradeoff between accurate harmonic estimation and fast transient response is required. Moreover, the computational burden of these algorithms is usually high. In [
27], a recursive DFT implementation was used to reduce the processing time.
One of the main techniques used for voltage control in Active Power Filters is based on PI controllers in the Synchronous Reference Frame (SRF) [
28,
29], due to its inherent immunity to distorted voltage conditions, fast response, and ease of implementation. Another technique that has been used for active filters, and PWM converters in general, is the Proportional Resonant (PR) Controller. This technique is derived from the SRF PI controller with the advantage of being applied directly to the measured signals, reducing the need for transforms [
30]. Additionally, it can be used to selectively compensate for particular harmonics only, with a simpler structure compared to the SRF [
23,
29].
More recently, Model Predictive Control (MPC) has been used in APF applications [
31,
32] due to the fast transient response inherent to the predictive nature of the control and the possibility to include control restraints and non-linearities in the cost functions. A shortcoming of this strategy is that the predictive controller presents prediction errors when there is a parameters mismatch in the model of the plant [
33], thus requiring detailed knowledge of the system. This can be an issue for the presented power flow controller since the distribution grid parameters may not be accurately known and can change due to power grid reconfiguration. Furthermore, in [
32], additional adaptive notch filters (ANFs) and PR controllers were required to obtain the correct harmonic current references for the MPC controller in an LC-coupled hybrid filter, increasing the complexity of the control strategy.
Moreover, control strategies based on artificial intelligence algorithms, such as Artificial Neural Networks (ANN), Fuzzy-based systems, etc. [
34,
35,
36,
37], or controllers optimized using machine learning techniques [
38] have been described in the literature. These strategies have shown equivalent or better results than the traditional control techniques in determined scenarios. However, they are much more complex than the conventional control strategies, require large amount of data for training or demand huge computing power.
Considering the above, this paper provides a comparative analysis between two of the main control techniques for Active Power Filters: SRF and PR-based algorithms, performing harmonic isolation in a series power flow controller when interconnecting two distribution feeders with the presence of non-linear loads. First, the explanation of both algorithms is carried out. Then, a comparison is made through simulations and experimental tests in a 13.8 kV laboratory prototype with different types of non-linear loads. The main contribution of this paper is to verify the usefulness and ease of implementation of these two simple and effective strategies for a series power flow controller, which is different from a conventional SAPF connected between a source and a load. Additionally, the analyses were performed with the objective of selecting a control strategy for real equipment, and they demonstrate some results that could only be observed in practical implementation and not in simulations.
3. Fundamental Frequency and Harmonic Control
The complete modelling of the equipment is presented in [
16]. The main control loop equations can be derived for the converter interconnecting two feeders at the terminal of two distribution feeders as shown in
Figure 2.
In
Figure 2 VA and
VB represent the power grid HV voltage sources, T
A and
TB are the substation transformers,
ZL1 and
ZL2 are the distribution feeder impedances,
Z1 and
Z2 are the lumped load impedances,
LF1 and
LF2 are the inductances of the converter switching filter,
TS is the coupling transformer and
Cdc is the converter dc-link capacitor.
V1 and
V2 are the feeder voltages at the connection point and
VT is the converter output voltage.
The converter control objective is to control the current IT flowing between the two feeders while keeping the minimum terminal voltage difference V1–V2. However, this should be carried out only for the fundamental frequency so that the distortion present in one feeder does not pollute the adjacent feeder. To perform this task, the main control loop is separated in two parts: one manipulates the fundamental component of the transferred current and the second performs the blocking of harmonic voltages.
The fundamental frequency control uses cascaded PI controllers in the synchronous reference frame. For the harmonic isolation, two harmonic mitigation techniques will be evaluated and are briefly described in this section.
3.1. Synchronous Reference Frame
The SRF (Synchronous Reference Frame) is a coordinate transformation for a synchronous reference system. With this technique it is possible to obtain both the alternating components that are multiples of the fundamental (i.e., harmonic content) and only the fundamental component of the desired measurement (depending on the type of filter used—i.e., low-pass or high-pass) [
28], which allows real-time implementation through digital signal processing.
In this technique, all signals are shifted from 60 Hz, allowing the fundamental components of the system to be transformed into the desired components of the system involved (e.g., the fundamental component or, in this case, the harmonic content).
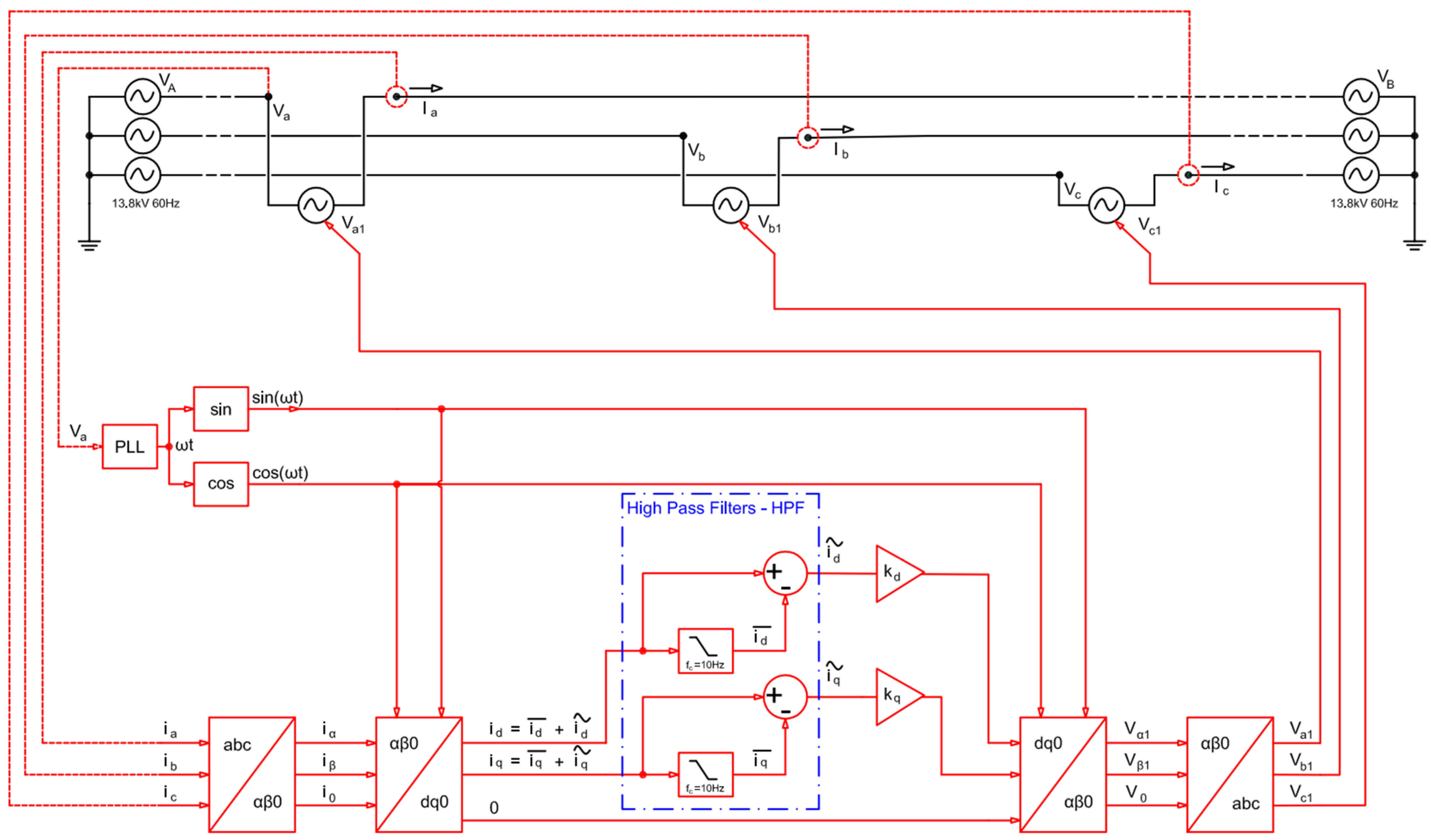
The block diagram of the three-phase synchronous reference algorithm to obtain the current harmonic components is shown in
Figure 3. The currents or voltages of interest are transformed from the
abc coordinate system to the stationary reference system
αβ0 through the Clarke Transform. The
αβ0 components are transformed from the stationary system to the synchronous system
dq through the Park Transform. Then, to convert back to the
abc coordinate axis, the Inverse Park Transform and then the Inverse Clarke Transform are applied.
The Park Transform requires two unit vectors, sin(ωt) and cos(ωt), in phase and at 90°, respectively, with the system voltage or current. These signals are obtained from a PLL (Phase Locked Loop). A PLL is an algorithm that keeps track of the angle of the fundamental frequency component of the grid voltage [
39].
The Park Transform provides the components
id and
iq (or
vd and
vq), which can be decomposed into continuous and alternating components according to (1) and (2):
The continuous components (, ) represent the fundamental component, that is, 60 Hz. The alternating components (, ) represent the harmonic content. In this work, the components (, ) are used for power flow control and (, ) are used to perform the blocking of the harmonic components.
To obtain the harmonic content of (1) and (2), a high-pass filter is used. The high-pass filter was implemented from a low-pass filter, which is a solution that allows the removal of the continuous component present in
id and
iq, as in (3) and (4), without phase-shift errors.
Thus, these obtained abc signals are multiplied by a proportional gain after the transformations and are applied to the series active filter involved.
Modified Synchronous Reference Frame
For single-phase systems, the Modified Synchronous Reference Frame (MSRF) is used, which is an adaptation of the standard three-phase Synchronous Reference Frame (SRF) [
39]. This method consists of multiplying the input signal directly by the two orthogonal signals generated by the PLL (sin(ωt) and cos(ωt)) and is represented in the block diagram of
Figure 4. An important difference from the three-phase SRF is that the signals
id and
iq in the MSRF have half the amplitude of the original signals in the abc frame, so a gain of two must be used in the MSRF loop, as shown in
Figure 4.
3.2. MSRF-Based Controller
The first proposed control strategy, shown in
Figure 4, is based entirely in the MSRF, with two PI controller feedback loops. The current loop controls the transferred current (
IT). Additionally, for a higher
X/R line ratio, there will be a higher coupling between
id and
iq variables when an additional decoupling technique might be required.
The current control loop at fundamental frequency, shown in black in
Figure 4, is responsible for transferring the required amount of power, where
id corresponds to the active component of the fundamental current and
iq to the reactive component. This loop compares the actual transferred current (
id and
iq) to their reference values (
idref and
iqref), generating the modulation indexes
mid and
miq. These modulation indexes are multiplied by unit vectors
sin(ꞷt) and
cos(ꞷt) and then summed to generate the PWM reference signal (
Vpwm).
The harmonic isolation control loop is shown in red in
Figure 4. This loop obtains the harmonic content of the transferred current
IT using a high-pass filter in the MSRF and feeds this harmonic content back to the converter voltage reference signal
Vpwm by means of a proportional gain
K. This provides a very high impedance for the harmonics, preventing harmonics from flowing from one distribution feeder to the other.
3.3. Proportional Resonant Based Controller
Another harmonic control algorithm that will be evaluated for the series converter is based on the Proportional Resonant Controller (PR). This controller is the mathematical transformation of a PI controller in the Synchronous Frame [
30]. The PR controller transfer function is given by (5).
where
kp is the proportional gain,
kr is the resonant term gain and
ω is the resonance frequency. Due to the high gain at the resonance frequency
ω, this controller can track a sinusoidal reference at this frequency without steady-state error. This characteristic is similar to that presented by a PI controller with a dc reference.
However, Equation (5) represents an ideal tuned controller with very low bandwidth, which can present problems in digital implementations. For practical cases, it is recommended to use the transfer function given by (6), which represents the controller as a bandpass filter, whose bandwidth can be defined by the term
ωc.
where
ω0 is the filter tuning frequency of (60 Hz) and
ωc is the frequency that defines the controller bandwidth. Several resonant controllers can be used in parallel, as in (7), to provide compensation of multiple harmonics at the same time. The main harmonics present in the distribution networks are the low order odd ones, so resonant terms were used for the third, fifth, seventh, ninth and eleventh harmonics.
The block diagram of fundamental power flow control (in black) and harmonic isolation using the Proportional Resonant controller (in red) is shown in
Figure 5.
It is observed that the proportional term presents constant gain for the entire spectrum, and that the fundamental component should not be affected by the harmonic compensator as in the SRF. This influence is caused by the imposition of a voltage of 60 Hz which causes an active power consumption in the series converter. Therefore, the fundamental component must be separated from the harmonics. This is conducted in the scheme of
Figure 5 using a high-pass filter inside the MSRF, which is the same strategy from
Figure 4.
6. Experimental Results
Laboratory tests were performed to verify the effectiveness of the harmonic isolation algorithms and compare both techniques empirically, since the simulations presented similar results for both cases. The experimental tests consider factors that are not present in the simulations such as noise, saturation and limitations on the digital implementation of the controllers (such as quantizing effects, sampling frequency, etc.).
The test circuit used in the lab is shown in
Figure 24, which is formed by the feeder impedances (
RA and
LA) connected at the low voltage side, two step-up transformers (220 V:13.8 kV), a voltage source type non-linear load and the series power converters interconnecting the feeders through a coupling transformer
T1. Measurements were performed with three Fluke 435 power quality meters connected at the points indicated in
Figure 24.
Table 1 shows the parameters of the converter switching filter (
LF1 and
LF2), the resistance and inductance of the lines (
RA and
LA) and the loads used in the lab experimental results. The data for the transformers used in the test setup are presented in
Table 2, where
TA and
TB are the source step-up transformers and
T1 is the coupling transformer.
Table 3 shows the controller gains of the current and voltage control loops, at fundamental frequency, and the parameters of the harmonic isolation strategies.
The results obtained can be divided into three moments:
With radial topology (switch k1 in
Figure 24 is open).
In mesh with the converter transferring power from Feeder 2 to Feeder 1, without harmonic isolation.
In mesh with the converter transferring power from Feeder 2 to Feeder 1 and performing harmonic isolation.
In experimental results the current control references (idref and iqref) were defined as idref = 0.15 A and iqref = 0 A, without changes during all of experimental tests.
The control tuning (i.e., controllers gains) of the harmonic controllers and the fundamental frequency control was conducted empirically with the aim of having a relatively quick response but without instabilities during disturbances provided by the load’s insertion or remotion.
6.1. Results of SRF-Based Harmonic Isolation Algorithm
In this section the experimental results with the SRF-based strategy (
Figure 4) to block the passage of harmonics while controlling power flow at fundamental frequency are presented.
Firstly, the system was in the radial form (in which the ends of the feeders are open by k1 and without the converter), and the non-linear load was inserted in Feeder 1. The harmonic spectrum of the terminal voltages of the two feeders are shown in
Figure 25. The harmonic spectrum of
V1 is shown in
Figure 25a while that of voltage
V2 is shown in
Figure 25b. Upon comparing both THDs, it can be verified that voltage
V1 is more distorted than
V2.
Then, keeping the non-linear load on Feeder 1, the converter starts to operate, transferring a current of 0.140 A from Feeder 2 to Feeder 1 without performing harmonic isolation.
Figure 26a shows the waveform of the voltage
V1 and the current transferred by the equipment. Note that the transferred current is not purely sinusoidal, which can be proved by the harmonic spectrum shown in
Figure 26b with a THD of 10.7%.
In
Figure 27 the voltage harmonic spectra of the two feeders are presented, showing that the greater harmonic distortion present in the voltage of Feeder 1 (previously with THD = 4.7%) is propagated to Feeder 2 (previously with THD = 1.6%), resulting in a THD of 2.2% at both terminal voltages.
Next, the non-linear load remains inserted in Feeder 1, with the current being transferred from Feeder 2 to Feeder 1 and the harmonic isolation algorithm based on the SRF being activated.
Figure 28 shows the waveforms of the Feeder 1 voltage and loop current, which is slightly less distorted than in
Figure 26a.
Figure 29a shows the harmonic spectrum of voltage
V1 and
Figure 29b that of voltage
V2. Comparing the two figures, the THD of
V1 is higher, with 3.0%, while that of
V2 is lower, with 2.2%. These THD values demonstrate that most of the distortion from Feeder 1 is kept in Feeder 1 and does not propagate as much to Feeder 2 as in the case where there is no harmonic isolation.
However, as opposed to the simulation results in
Section 4.2 and
Section 4.3, the SRF-based algorithm is not capable of completely isolating the harmonics between both feeders. This happens because the harmonic mitigation capacity of the SRF-based algorithm depends on the proportional gain
K shown in
Figure 4. Since the harmonics are extracted from the fundamental frequency components using a high-pass filter, all the PWM noise and other high frequency noise present in the feedback signal is multiplied (and amplified) by the gain
K. This inhibits the use of high values for
K, which limits the harmonic isolation capacity of this strategy in actual experimental setups. This was not a problem in the simulations, since the PWM converter was modeled as a controlled voltage source. For experimental tests, a low-pass filter with high cutoff frequency was included in the loop, but still the harmonic isolation results with SRF in the lab were not as good as in the simulations.
Another test was performed with the SRF-based harmonic isolation algorithm where the fundamental frequency current references were set to zero (
idref = 0 and
iqref = 0) with the non-linear load still connected to Feeder 1.
Figure 30a shows the terminal voltage and loop current waveforms without harmonic isolation. Due to the voltage distortion difference, there is a harmonic current flow between the two feeders even with the current reference set to zero.
Figure 30b shows the same waveforms with harmonic mitigation enabled. One can see that the harmonic current transferred is reduced from
Figure 30a to
Figure 30b; however, there are still some minor components that are not blocked by the SRF-based algorithm.
6.2. Results of PR-Based Harmonic Isolation Algorithm
In this section the experimental results with the PR-based algorithm (
Figure 5) to block the passage of harmonics between feeders while controlling power flow at fundamental frequency are presented.
Being the system in the radial form (the ends of the feeders are open by k1 and without the converter), the non-linear load was inserted in Feeder 1. The measurements of the terminal voltages of the two feeders are shown in
Figure 31. Note that Feeder 1 voltage
V1 (
Figure 31a) has a more distorted waveform than Feeder 2 voltage
V2 (
Figure 31b), since the load is connected to Feeder 1. The harmonic spectrum of
V1 is shown in
Figure 32a while that of voltage
V2 is shown in
Figure 32b. Upon comparing the two THDs, it can be verified that voltage
V1 is more distorted than
V2.
Then, keeping the non-linear load on Feeder 1, the converter starts to operate, transferring a current of 0.353 A from Feeder 2 to Feeder 1 without performing harmonic isolation.
Figure 33a shows the waveform of the voltage
V1 and the current transferred by the equipment. Note that the transferred current is not purely sinusoidal, which can be proved by the harmonic spectrum shown in
Figure 33b with a THD of 12.8%. In
Figure 34 the voltage harmonic spectrum of the two feeders is presented, showing that the greater harmonic distortion present in the voltage of Feeder 1 (previously with THD = 6.6%) is propagated to Feeder 2 (previously with THD = 1.6%), resulting in a THD of 2.9% at both terminal voltages.
Finally, with the non-linear load inserted in Feeder 1, the PR-based harmonic isolation algorithm is activated, demonstrating that, even with the feeders interconnected by the converter, the distortion present in Feeder 1 no longer propagates to Feeder 2.
Figure 35a shows the harmonic spectrum of voltage
V1 and
Figure 35b that of voltage
V2. Comparing the two figures, the THD of
V1 is higher, with 5.3%, while that of
V2 is lower, with 1.9%. These values are very close to Case 1, in which the feeders were not interconnected. Observing the current transferred between the feeders, as shown in
Figure 36, it can be seen that it is composed almost entirely of the fundamental component (THD = 4%, in
Figure 36b), which was previously 12.8% in
Figure 33b.
Moreover, the transferred current is closer to a sine curve than the one obtained with the SRF-based algorithm in
Figure 28. This happens because the frequency selective feature of the PR controller guarantees that only the selected harmonic frequencies will be injected by the controller/converter, so the high frequency noise is not feedback into the loop generating problems in actual applications. This comes with an increase in computational cost and controller gain tuning procedure, since several controllers are used in parallel, one for each harmonic frequency. In most cases, since the major harmonics in the bus voltages are the low order harmonics, only five controllers were needed.
In the last test performed with the PR-based harmonic isolation algorithm, the fundamental frequency current references were set to zero (
idref = 0 and
iqref = 0), with the non-linear load still connected to Feeder 1.
Figure 37a shows the terminal voltage and loop current waveforms without harmonic isolation. Due to the voltage distortion difference, there is a harmonic current flow between the two feeders even with the current reference set to zero.
Figure 37b shows the same waveforms with harmonic mitigation enabled. It can be seen that the harmonic current transferred is reduced from
Figure 37a to
Figure 37b, and that the remaining harmonic content is even lower than what was obtained with the SRF-based algorithm shown in
Figure 30b.
To summarize, the main results are presented in
Table 4. For the simulation cases, both techniques achieved similar performances, keeping the harmonics restricted to the feeder whose non-linear loads were connected and reducing the THD of the feeder without the non-linear loads to about 0.5%. For the experimental case, the PR-based algorithm performed better harmonic isolation. This can be verified in
Table 4 by comparing the values of the voltage THDs of Feeders 1 and 2, with harmonic isolation, to the radial case. These values are closer to the PR-based algorithm than to the SRF-based algorithm, which shows that the system behaves similarly to an open circuit from the harmonics point of view with the PR-based approach.
7. Conclusions
The interconnection of radial distribution feeders using a series power flow controller is a cost-effective approach to improve the flexibility and utilization of these circuits in a controlled and secure way. However, if these feeders present different harmonic distortions, harmonic currents can flow between them, propagating harmonic pollution from one circuit to the other. Implementing a harmonic isolation feature in the equipment interconnecting these circuits is of the utmost importance to improve power quality in meshed distribution networks.
In this way, this paper presented the description, implementation and comparison of two techniques to perform harmonic isolation in a series compensator: an SRF-based algorithm and a PR-based controller. This comparison was made using simulations and experimental results in a 13.8 kV laboratory with different types of non-linear loads.
For the simulation cases, both techniques achieved similar performances, keeping the harmonics restricted to the feeder whose non-linear loads were connected and reducing the THD of the feeder without the non-linear loads. For the experimental results, the PR-based algorithm was able to perform better harmonic isolation. In the radial case, the main voltage THD of Feeder 2 was 1.6% without non-linear loads. The SRF-based algorithm could achieve a THD of 2.2% in the Feeder 2 without non-linear loads when both feeders were interconnected. On the other hand, the PR-based algorithm was able to achieve a THD of 1.9% in the same situation, providing better harmonic isolation.
Especially in the experimental case study, where several factors such feedback signal noise and limitations in the controller’s digital implementation can influence algorithm performance, the PR-based strategy proved to be more robust and accurate. Even though multiple resonant compensators are needed, which increases the computational burden and tuning procedure, the selective frequency feature of this strategy proved to be more suitable for real applications.


 ,
, 





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}