
Simulation of the Temperature of a Shielding Induction Motor of the Nuclear Main Pump under Different Turbulence Models
Abstract
:1. Introduction
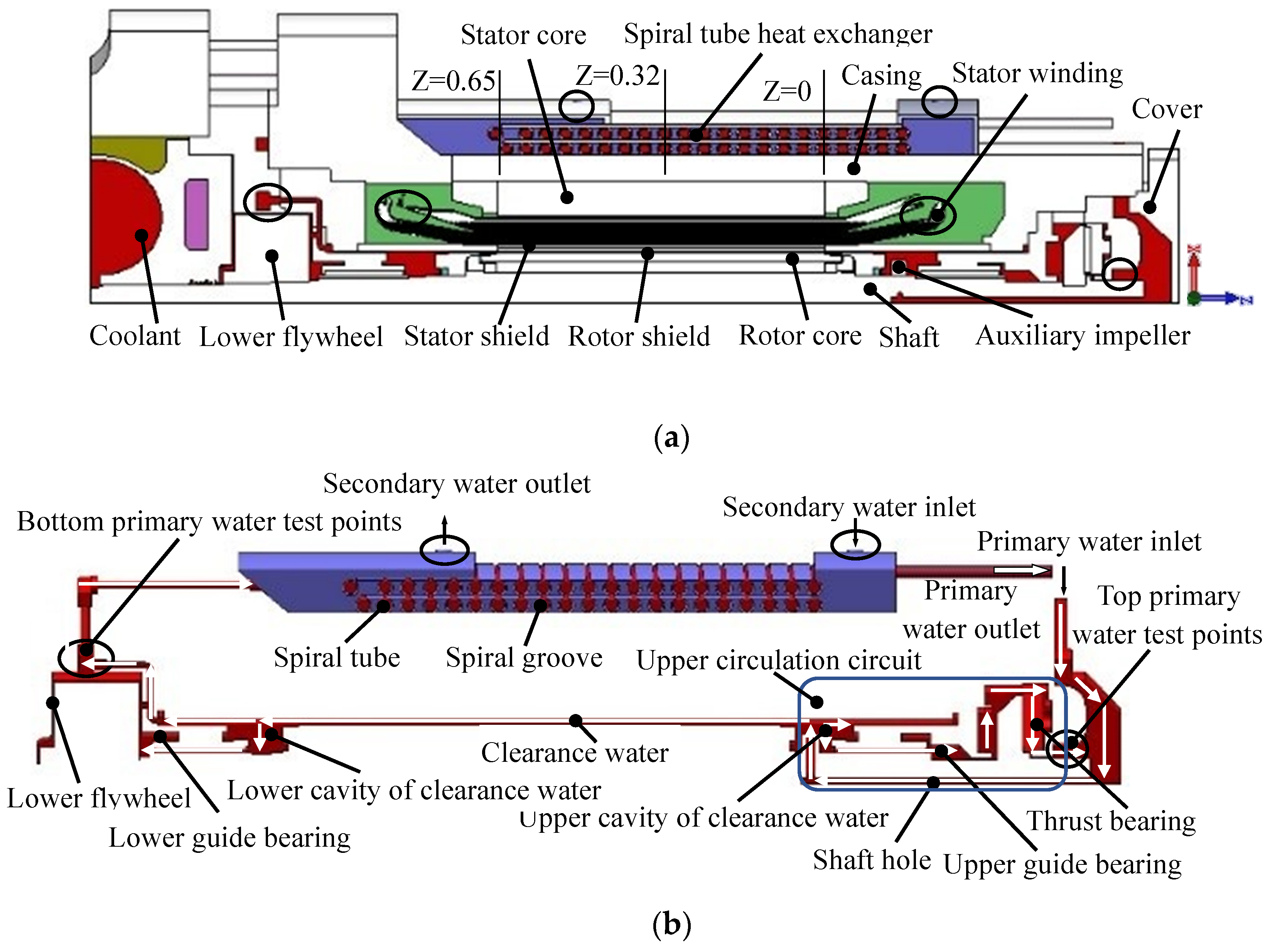
2. Geometrical Model Description
3. Mathematical Model and Solution Conditions
3.1. Basic Assumptions
3.2. Mathematical Model
3.3. Solution Conditions
3.3.1. Boundary Conditions
3.3.2. Heat Source and Physical Property Parameters
3.4. Solving Method
4. Results and Discussion
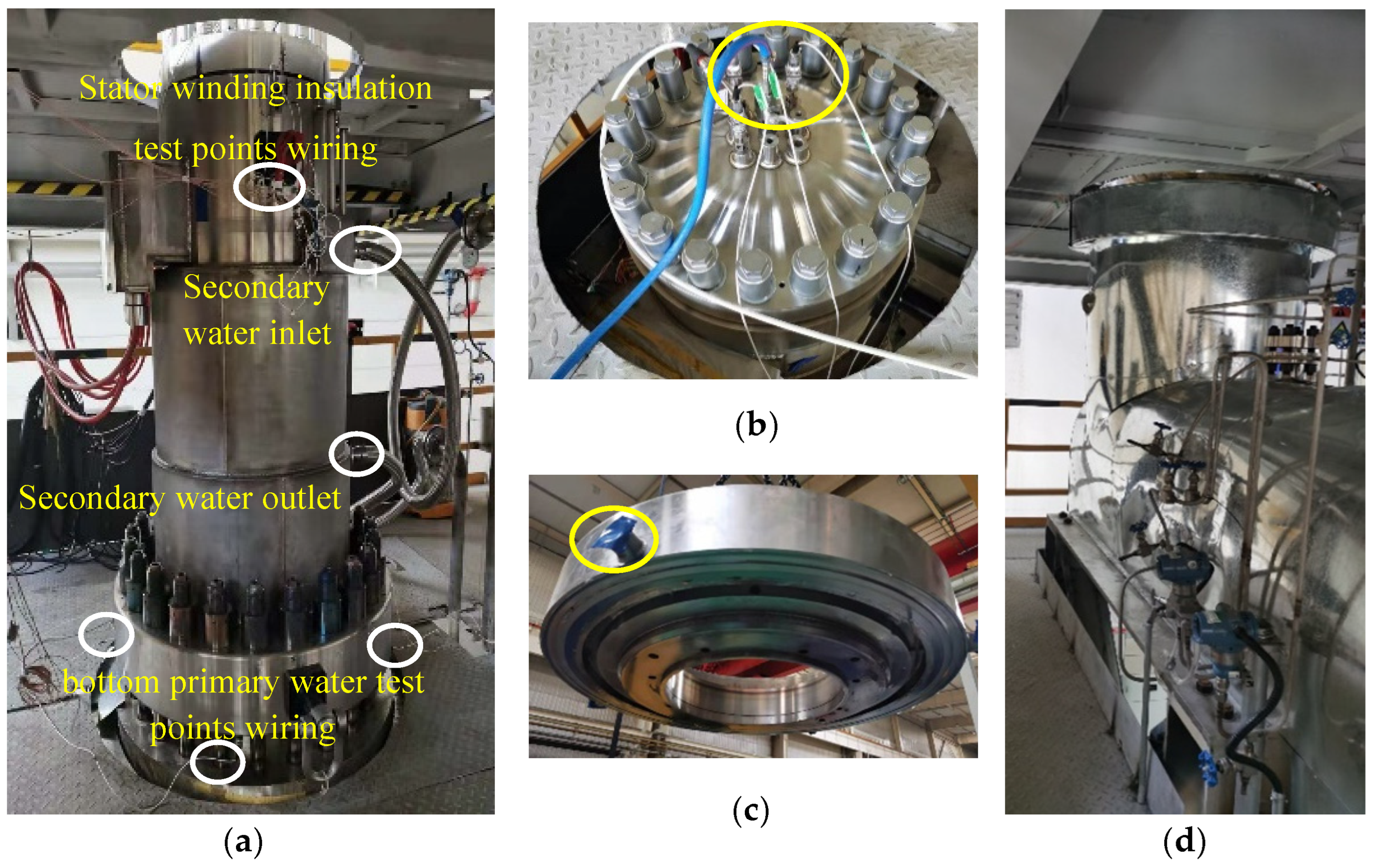
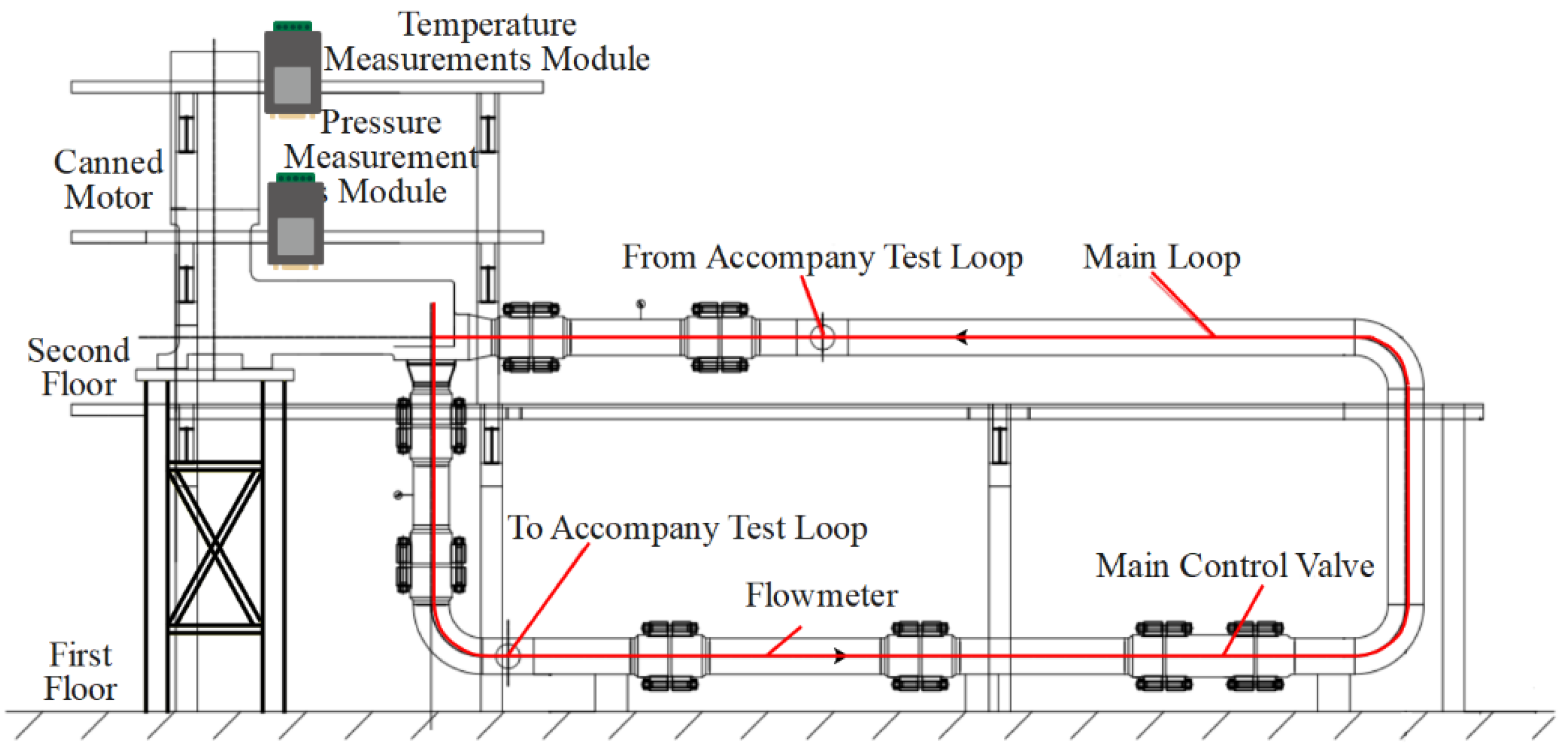
4.1. Prototype Test
4.2. Effect of Turbulence Models on the Temperature of Stator Winding Insulation
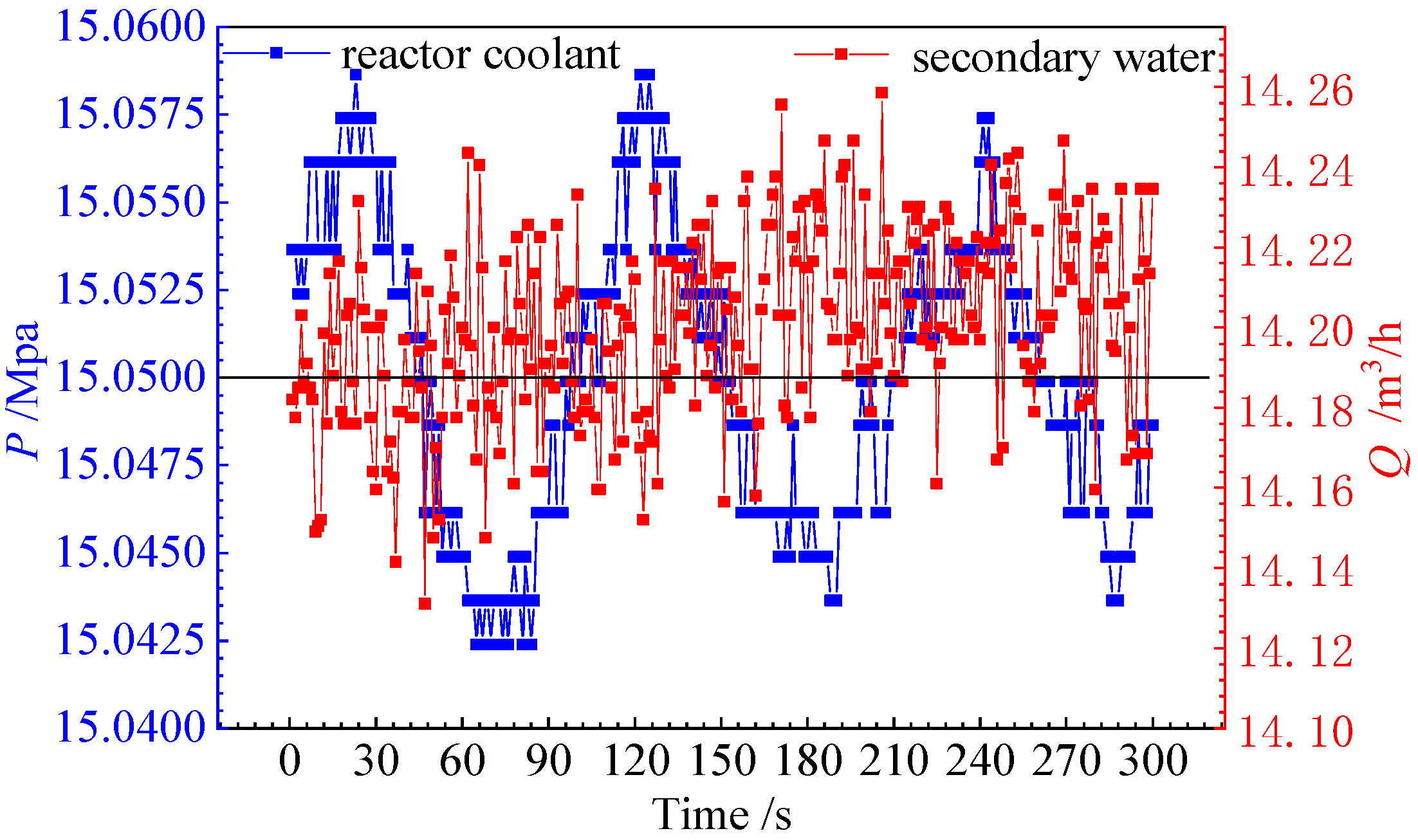
4.3. Effect of Turbulence Models on the Temperature of Primary and Secondary Cooling Water
4.4. Temperature Distribution Characteristics of the Motor
5. Conclusions
- (1)
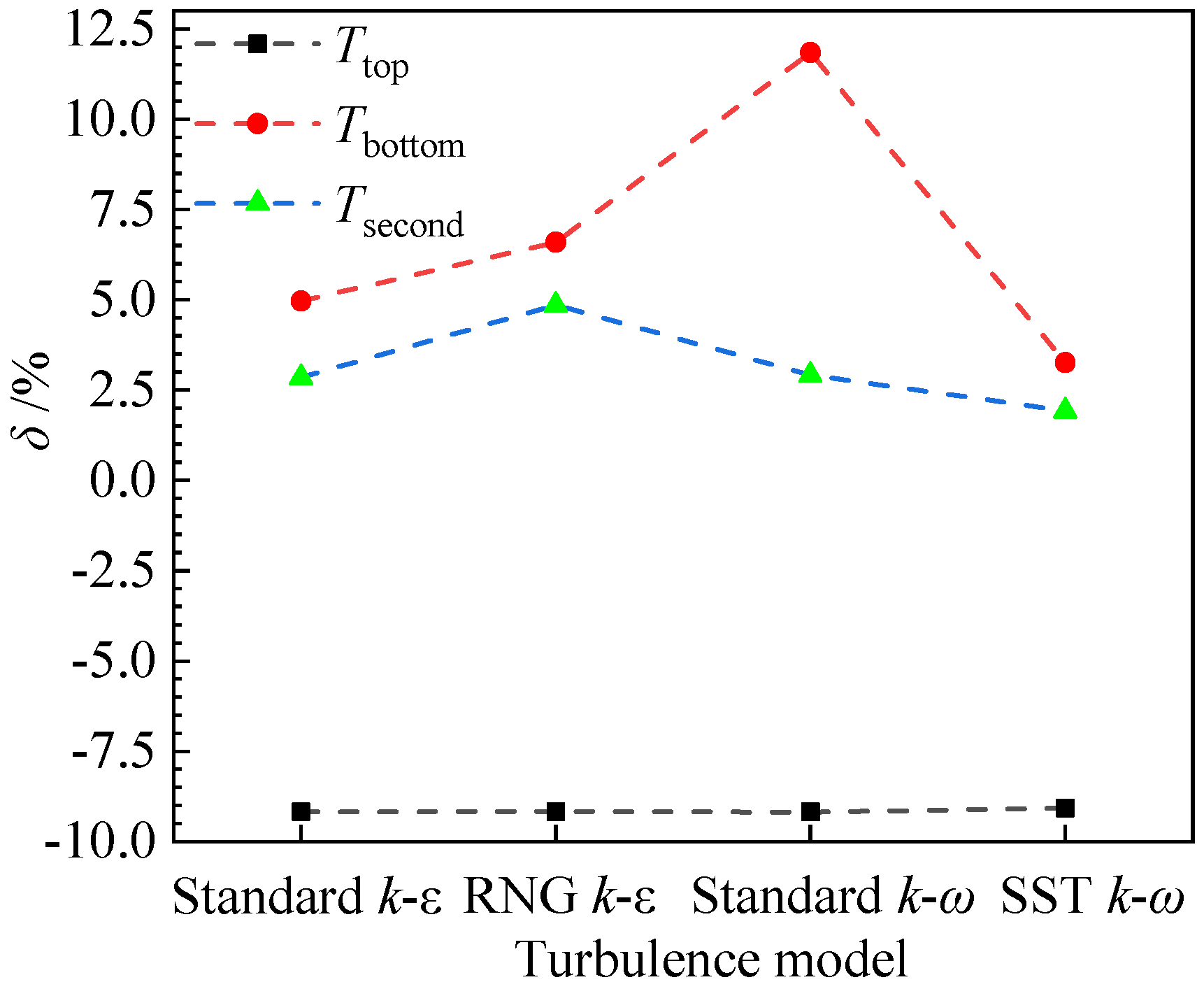
- Changes in the four types of turbulence models had little effect on the temperature of the winding insulation. The maximum relative error was 1.16% and the minimum relative error provided by the SST k-ω model was 0.22%.
- (2)
- The selection of the turbulence model influenced the temperature of the lower guide bearing lubricating water and the temperature of the secondary cooling water outlet. The SST k-ω model showed the lowest relative error result of the temperature of the lower guide bearing lubricating water and the secondary cooling water outlet. The minimum relative error provided by the SST k-ω model was 3.26% and 1.92%, respectively. The SST k-ω model is more suitable for simulation of the temperature field of the shielded induction motor.
- (3)
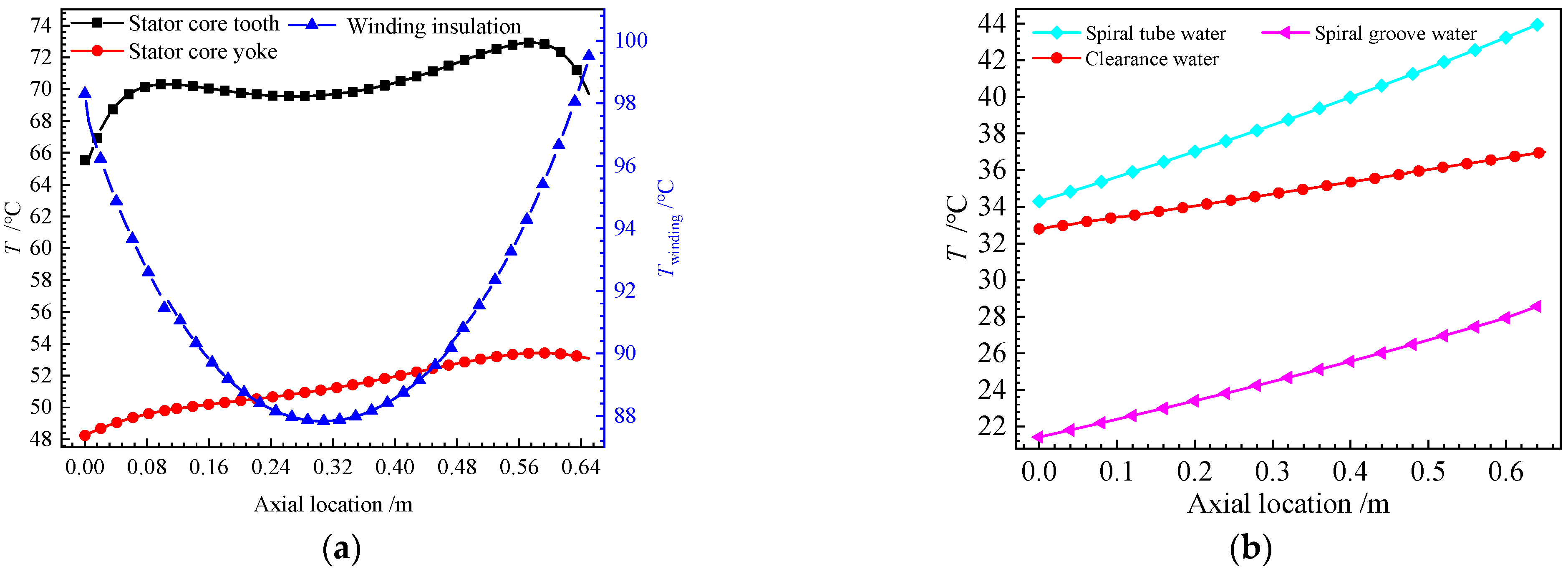
- The temperature in the clearance water, the spiral tube water, the spiral groove water, and the stator core yoke increased approximately linearly along the axial direction in the position of the spiral heat exchanger and the stator core located. Accurate calculation and research of the temperature field will provide basic data for the thermal stress calculation of the shielding induction motor. This paper will lay the foundation for the efficient and stable operation of shielded induction motor.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, C.; Lee, K. Numerical investigation of the air-gap flow heating phenomena in large-capacity induction motors. Int. J. Heat Mass Transf. 2017, 110, 746–752. [Google Scholar] [CrossRef]
- Janga, J.; Chiub, H.; Yanet, W.; Tsai, M.C.; Wang, P. Numerical study on electromagnetics and thermal cooling of a switched reluctance motor. Case Stud. Therm. Eng. 2015, 6, 16–27. [Google Scholar] [CrossRef] [Green Version]
- Bonnett, A.H. Operating temperature considerations and performance characteristics for IEEE 841 motors. In Proceedings of the Industry Applications Society Forty-Seventh Annual Conference 2002, Houston, TX, USA, 13 September 2002; pp. 1120–1131. [Google Scholar]
- Yoon, M.K.; Jeon, C.S.; Kauh, S.K. Efficiency increase of an induction motor by improving cooling performance. IEEE Trans. Energy Convers. 2002, 17, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Rehman, Z.; Seong, K. Three-D Numerical Thermal Analysis of Electric Motor with Cooling Jacket. Energies 2018, 11, 95. [Google Scholar] [CrossRef] [Green Version]
- Gundabattini, E.; Mystkowski, A.; Idzkowski, A. Thermal Mapping of a High-Speed Electric Motor Used for Traction Applications and Analysis of Various Cooling Methods—A Review. Energies 2021, 14, 1472. [Google Scholar] [CrossRef]
- Boglietti, A.; Mandrile, F.; Carpaneto, E.; Popescu, M.; Staton, D. Stator Winding Second-Order Thermal Model including End-Winding Thermal Effects. Energies 2021, 14, 6578. [Google Scholar] [CrossRef]
- Wang, D.; Liang, Y.; Li, C.; Yang, P.; Zhou, C.; Gao, L. Thermal equivalent network method for calculating stator temperature of a shielding induction motor. Int. J. Therm. Sci. 2020, 147, 106–149. [Google Scholar] [CrossRef]
- Ding, S.; Meng, F.; Ge, Y. Temperature field investigation of canned primary pump motors in nuclear power stations. Proc. CSEE 2012, 32, 149–155. [Google Scholar]
- Lu, Y.; Mustafa, A.; Rehan, M.A.; Razzaq, S.; Ali, S.; Shahid, M.; Adnan, A.W. The effects of water friction loss calculation on the thermal field of the canned motor. Processes 2019, 7, 256. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Ai, L.; Han, J.; Wang, B.; Suo, W. Sensitivity Investigation of Uncertainty Factors to Temperature Rise of Nuclear Main Pump Motor for Small Reactor. Proc. CSEE 2022, 1–10. [Google Scholar]
- Xie, Z.; Song, P.; Hao, L.; Shen, N.; Zhu, W.; Liu, H.; Shi, J.; Wang, Y.; Tian, W. Investigation on effects of Fluid-Structure-Interaction (FSI) on the lubrication performances of water lubricated bearing in primary circuit loop system of nuclear power plant. Ann. Nucl. Energy 2020, 141, 107355. [Google Scholar] [CrossRef]
- Xu, R.; Song, Y.; Gu, X.; Wang, Y.; Wang, D. Research on the flywheel clearance flow in canned motor RCP. Ann. Nucl. Energy 2021, 150, 107816. [Google Scholar] [CrossRef]
- Wang, Y.J.; Wang, D.Z.; Guo, W.Z.; Yin, J.L.; Hu, Y.Y. The effect of smaller turbulent motions on heat transfer in the annular gap flow of flywheel. Ann. Nucl. Energy 2016, 91, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Song, Y.; Gu, X.; Linb, B.; Wang, D. Research on the clearance flow between stator and rotor cans in canned motor RCP. Ann. Nucl. Energy 2021, 164, 108583. [Google Scholar] [CrossRef]
- Howey, D.A.; Childs, P.R.N.; Holmes, A.S. Air-Gap Convection in Rotating Electrical Machines. IEEE Trans. Ind. Electron. 2012, 59, 1367–1375. [Google Scholar] [CrossRef]
- Luo, G.; Yao, Z. Decoupling tests on axial heat-transfer in highly turbulent Taylor-Couette flow using thermal waves. Exp. Therm. Fluid Sci. 2021, 128, 110439. [Google Scholar] [CrossRef]
- Leng, X.Y.; Krasnov, D.; Li, B.W.; Zhong, J.Q. Flow structures and heat transport in Taylor–Couette systems with axial temperature gradient. J. Fluid Mech. 2021, 920, A42. [Google Scholar] [CrossRef]
- Staton, D.A.; Cavagnino, A. Convection Heat Transfer and Flow Calculations Suitable for Electric Machines Thermal Models. IEEE Trans. Ind. Electron. 2008, 55, 3509–3516. [Google Scholar] [CrossRef] [Green Version]
- Sun, P.; Lu, Y.; Tong, J.; Lu, Y.; Liang, T.; Zhu, L. Study on the Convective Heat Transfer and Fluid Flow of Mini-Channel with High Aspect Ratio of Neutron Production Target. Energies 2021, 14, 4020. [Google Scholar] [CrossRef]
- Lu, Y.; Ge, Y.; Wang, H.; Wang, F. Verification and analysis on turbulence model of flow field simulation for multiple ventilation stator ducts of air- cooled turbo generators. Electr. Mach. Control. 2018, 22, 63–69. [Google Scholar]
- Kim, C.; Lee, K.; Yook, S. Effect of air-gap fans on cooling of windings in a large-capacity, high-speed induction motor. Appl. Therm. Eng. 2016, 100, 658–667. [Google Scholar] [CrossRef]
- Khang, H.V.; Arkkio, A. Eddy-current loss modeling for a form-wound induction motor using circuit model. IEEE Trans. Magn. 2012, 48, 1059–1062. [Google Scholar] [CrossRef]
- Simpson, N.; Wrobel, R.; Mellor, P.H. An accurate mesh-based equivalent circuit approach to thermal modeling. IEEE Trans. Magn. 2014, 50, 269–272. [Google Scholar] [CrossRef]
- Bazgir, A.; Nikou, M.K.; Heydari, A. Numerical CFD analysis and experimental investigation of the geometric performance parameter influences on the counter-flow Ranque-Hilsch vortex tube (C-RHVT) by using optimized turbulence model. Heat Mass Transf. 2019, 55, 2559–2591. [Google Scholar] [CrossRef]
- Gao, L.; Wang, D.; Liang, Y.; Wang, C. Evaluation of can eddy current losses and can circulating current losses between the can and end structures in double canned induction motors. IET Electr. Power Appl. 2019, 13, 635–642. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters (Unit) | Value |
|---|---|
| Rated current (A) | 78.3 |
| Rated rotational speed (r/min) | 2923 |
| Rated frequency (Hz) | 50 |
| Number of stator slots | 30 |
| Number of rotor slots | 22 |
| Number of poles | 2 |
| Stator core length (mm) | 660 |
| Water clearance thickness (mm) | 2 |
| Types of Models | Value |
|---|---|
| Standard k-ε | |
| RNG k-ε | |
| standard k-ω | |
| SST k-ω |
| Components | Electric Losses (kW) | Thermal Conductivity(W/m·k) |
|---|---|---|
| Stator shield | 29.27 | λ = 0.015T + 9.697 |
| Rotor shield | 8.308 | up ↑ |
| Rotor copper bar | 10.32 | λ = 0.14T + 115.16 |
| Rotor core | 0.49 | λradial, tangent = 23.6, λaxial = 3.2 |
| Stator core | 0.9082 | up ↑ |
| Stator winding | 6.17 | λ = 400.99 − 0.08T |
| Rotor end ring | 0.454 | up ↑ |
| Insulation | — | 0.18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ai, L.; Lu, Y.; Han, J.; Suo, W. Simulation of the Temperature of a Shielding Induction Motor of the Nuclear Main Pump under Different Turbulence Models. Energies 2023, 16, 2792. https://doi.org/10.3390/en16062792
Ai L, Lu Y, Han J, Suo W. Simulation of the Temperature of a Shielding Induction Motor of the Nuclear Main Pump under Different Turbulence Models. Energies. 2023; 16(6):2792. https://doi.org/10.3390/en16062792
Chicago/Turabian StyleAi, Likun, Yiping Lu, Jiade Han, and Wenxu Suo. 2023. "Simulation of the Temperature of a Shielding Induction Motor of the Nuclear Main Pump under Different Turbulence Models" Energies 16, no. 6: 2792. https://doi.org/10.3390/en16062792