
New Method to Coordinate Vibration Energy Regeneration and Dynamic Performance of In-Wheel Motor Electrical Vehicles
Abstract
:1. Introduction
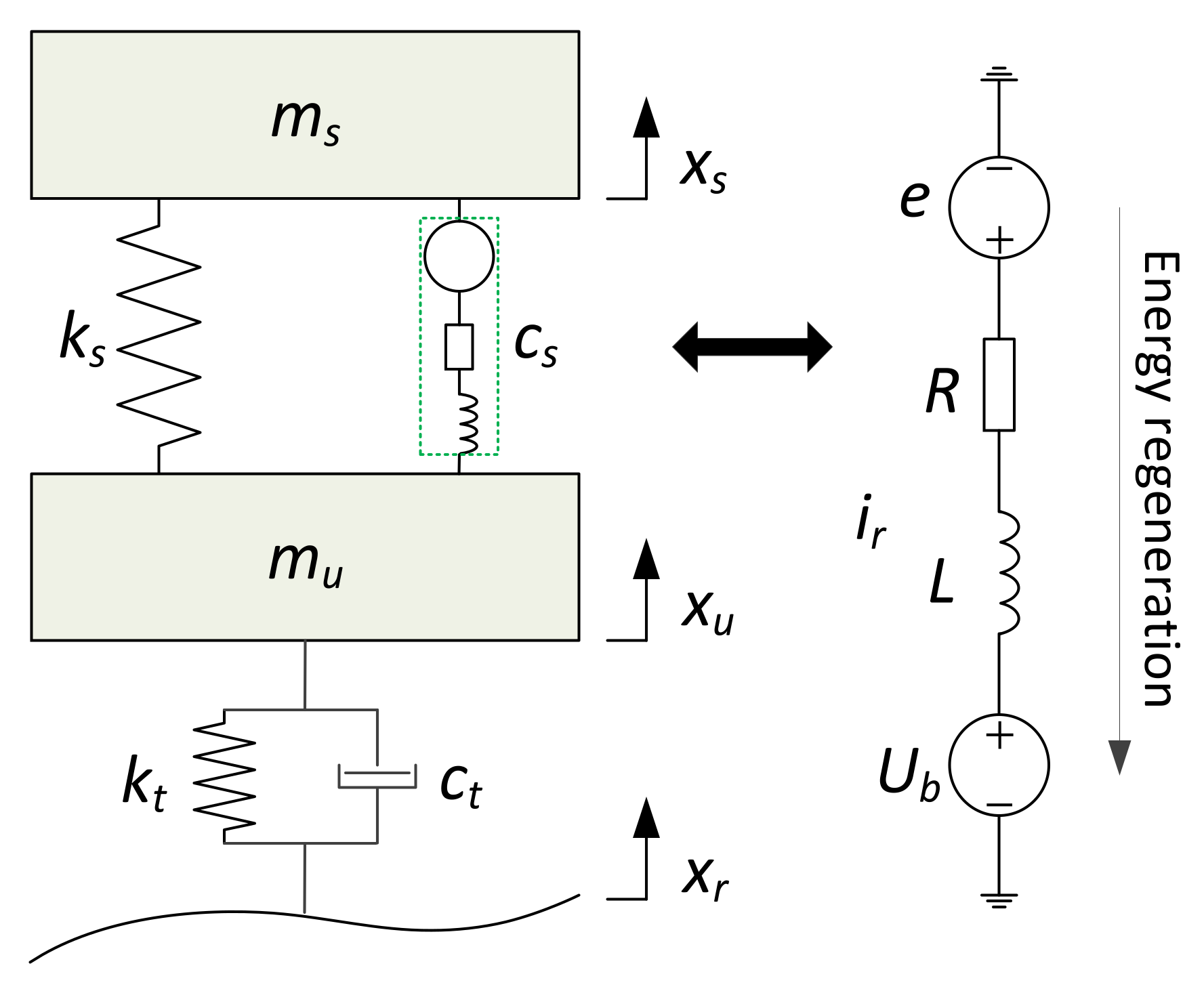
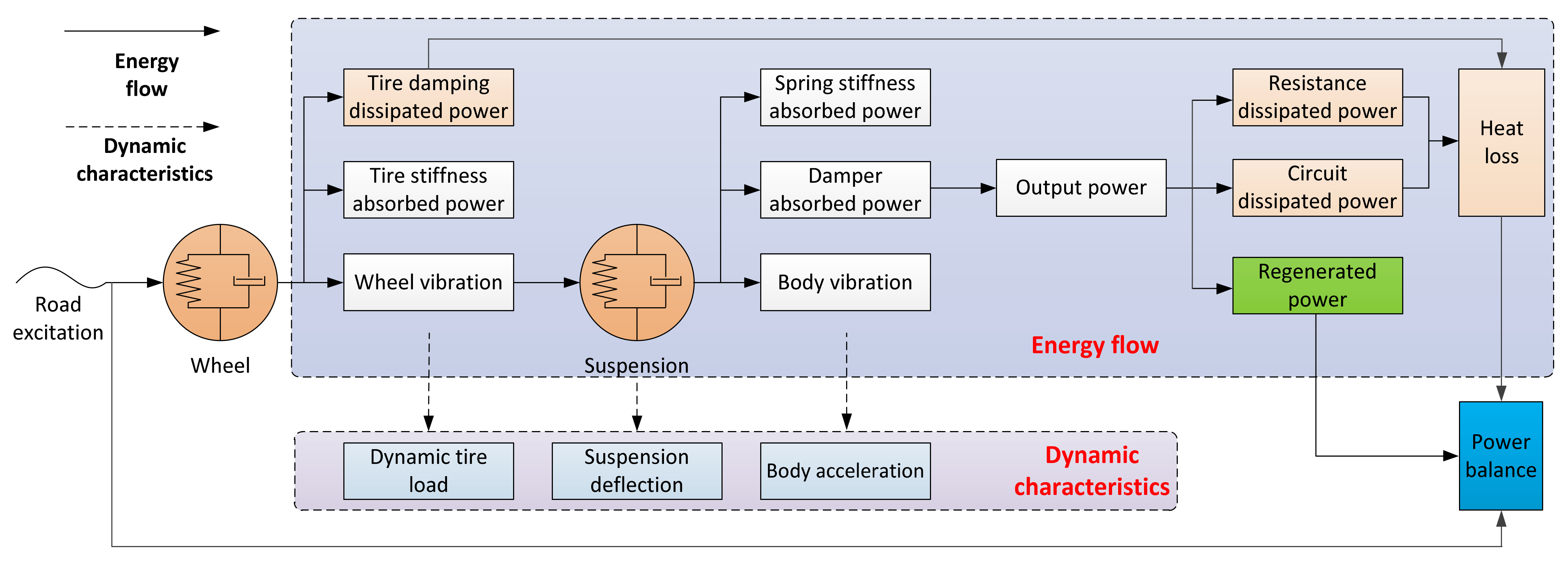
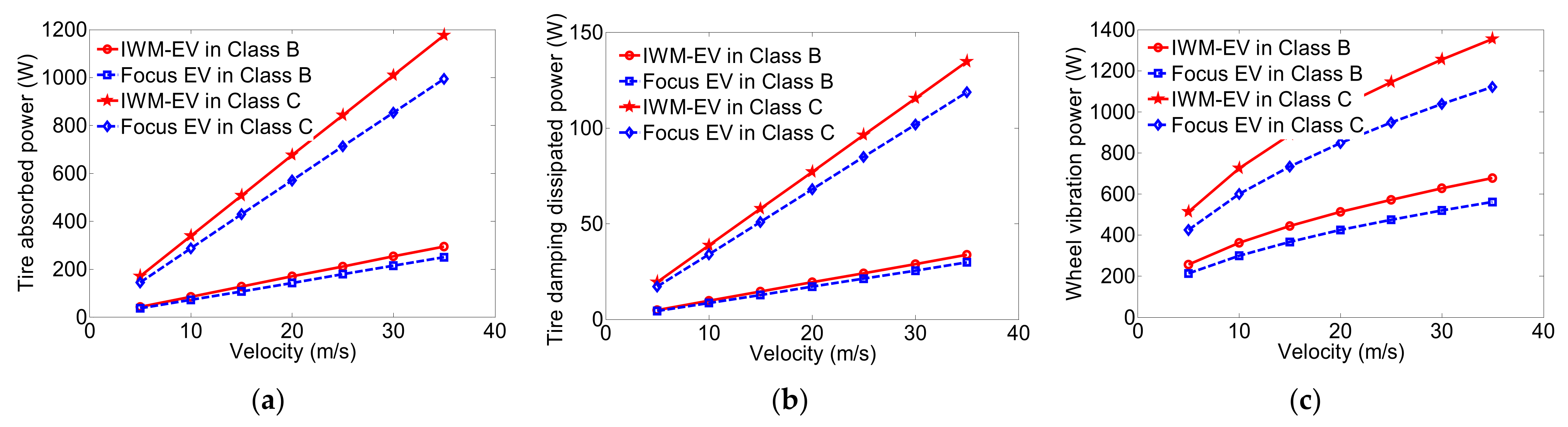
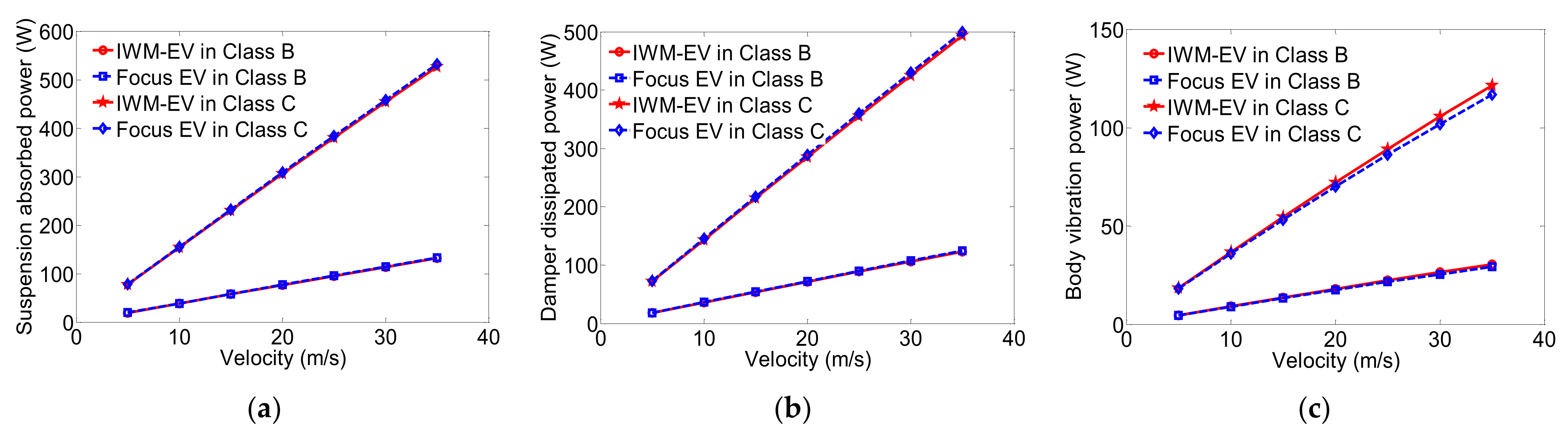
2. Influence Mechanism of Unsprung Mass on Energy Flow and Dynamic Characteristics
3. New Method for Coordination of Energy Regeneration and Dynamic Characteristics
3.1. Presentation of the New Method
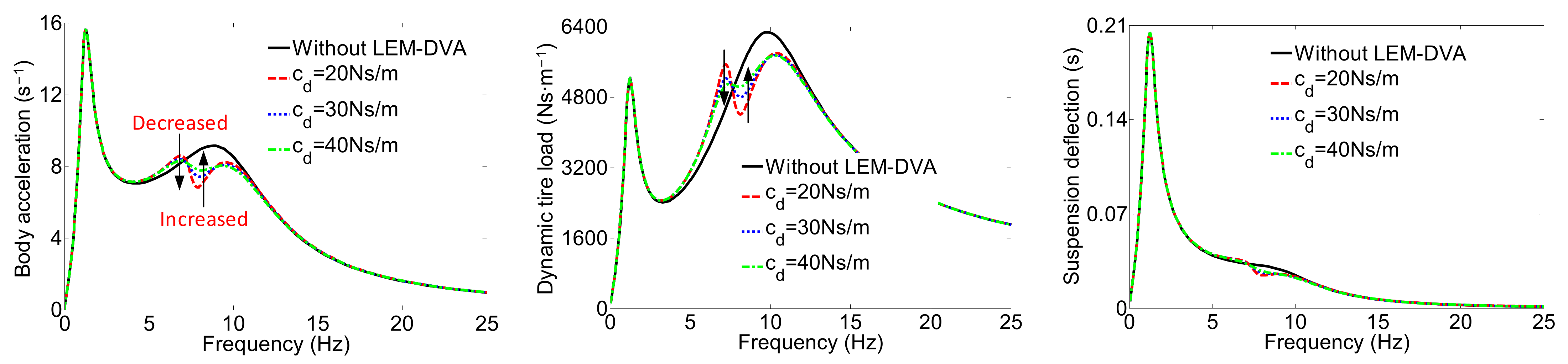
3.2. Parameter Sensitivity Analysis
3.3. Parameter Optimization
3.4. Simulation Analysis
4. Test Verification
4.1. Structure Implementation
4.2. Design of Energy Regeneration System
4.3. Bench Test
- The PC system is used to establish the model, determine the system input and output, and observe the simulation results.
- The dSPACE is responsible for downloading and running the model of the PC system and receiving/outputting signals.
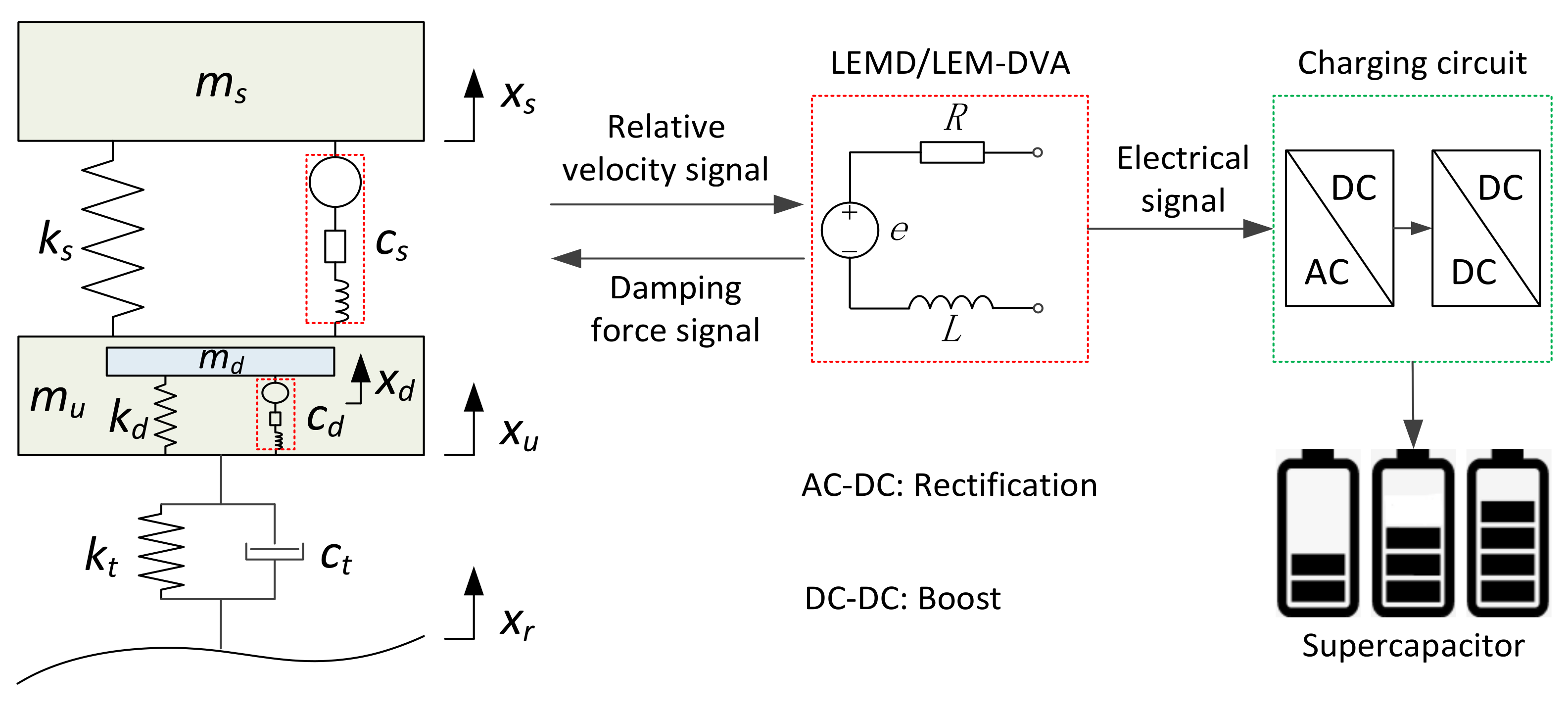
- The LEMD is used to generate a force to suppress vibration, and the LEM-DVA is used to produce a force to absorb vibration. Both components convert the energy generated by vibration into electrical energy.
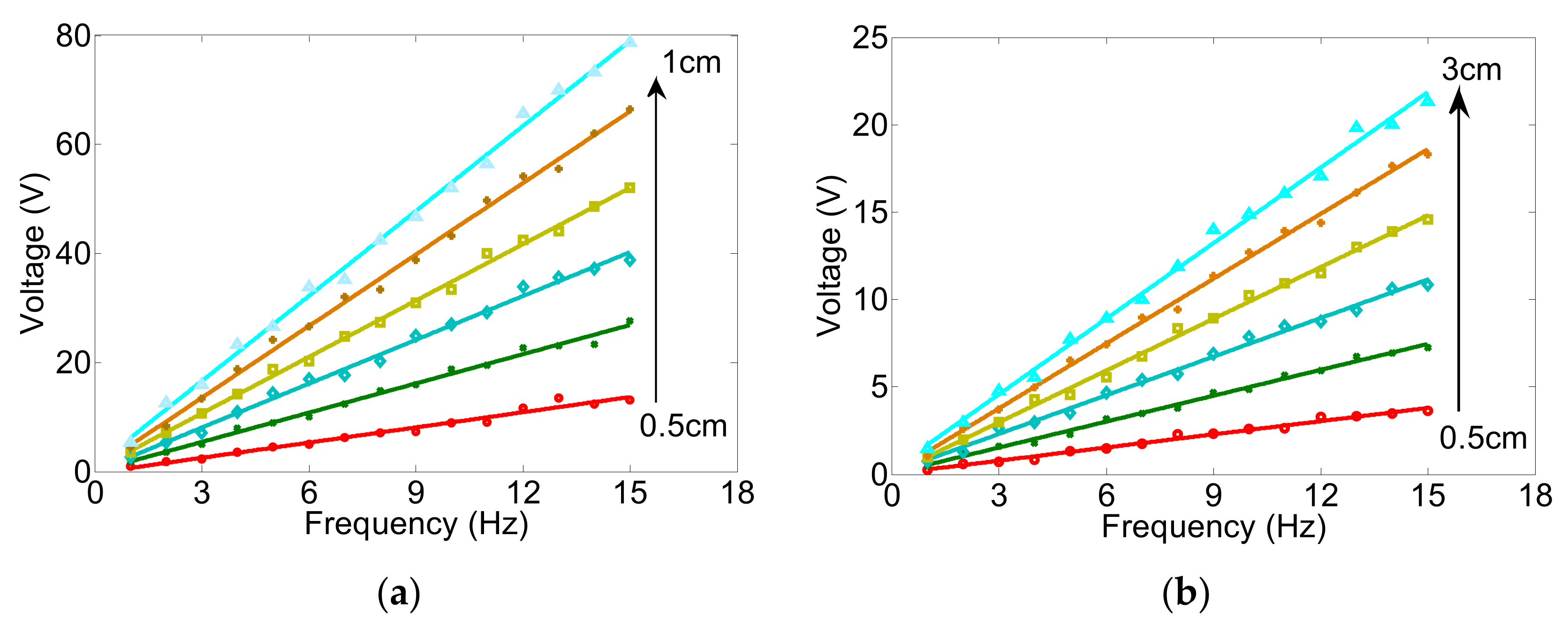
- The electronic load/supercapacitor are, respectively, connected to LEMD and LEM-DVA. Notably, the connection of the electronic load to LEMD and LEM-DVA facilitates testing of the output voltage characteristics of LEMD and LEM-DVA. Meanwhile, the connection of the electronic load to LEMD and LEM-DVA facilitates testing of the energy regeneration characteristics.
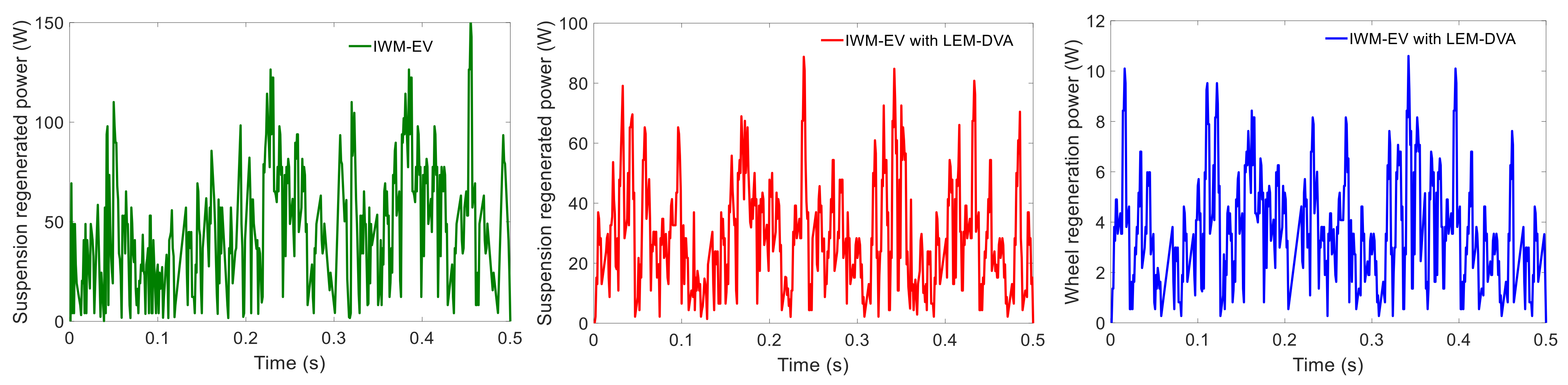
- The current/voltage sensor measures the voltage and current of the load resistance to obtain the energy regeneration power of LEMD and LEM-DVA, respectively (P = U × I). This measurement is different from simulation analysis whose evaluation index of energy regeneration is mechanical power, but the electrical power is adopted in the bench test. The relationship between mechanical and electrical power is conversion efficiency.
- The oscilloscope is used to observe current and voltage in real time.
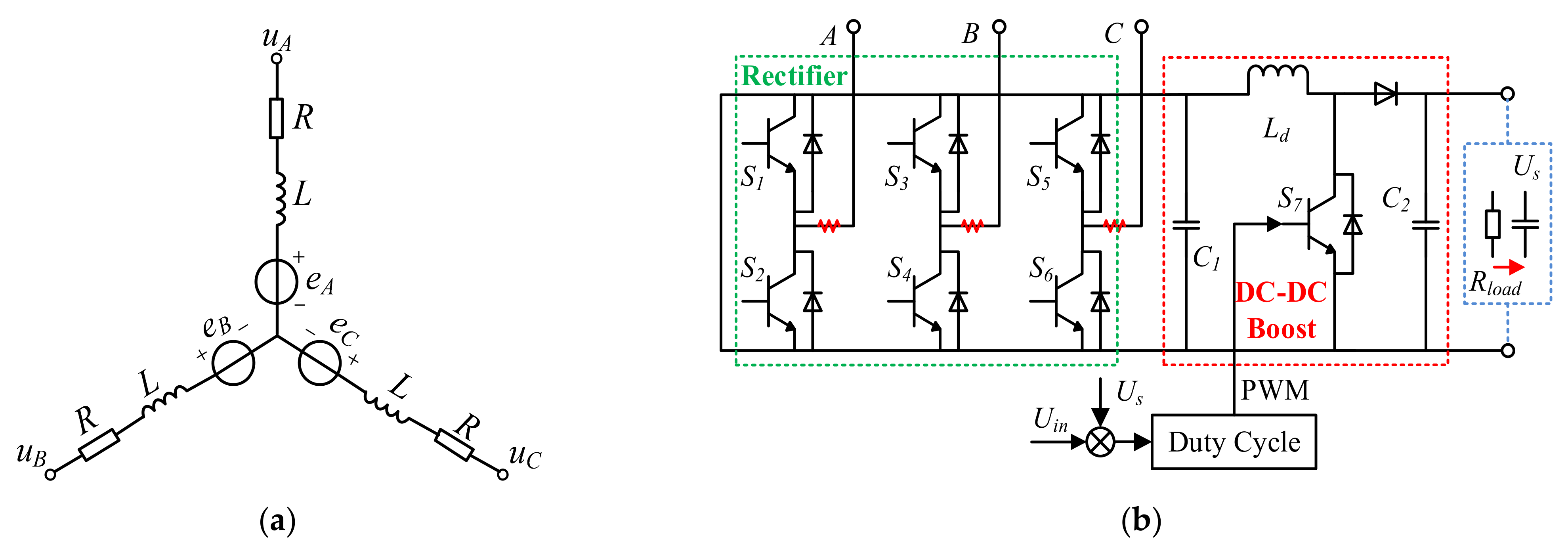
- The booster is used to convert the three-phase AC voltage into DC voltage, and the booster is utilized to amplify the rectified DC voltage to realize a higher output voltage than the terminal voltage of supercapacitors.
- The INSTRON 8800 is responsible for simulating suspension displacement.
5. Conclusions
- The influence mechanism of unsprung mass on energy flow and dynamic characteristics is investigated. The increase in unsprung mass allows additional power flow into the wheel, which deteriorates the road holding. The increased unsprung mass reduces the dissipated power of the damper, and additional power flows into the suspension and vehicle body, which exacerbates the body acceleration and suspension travel.
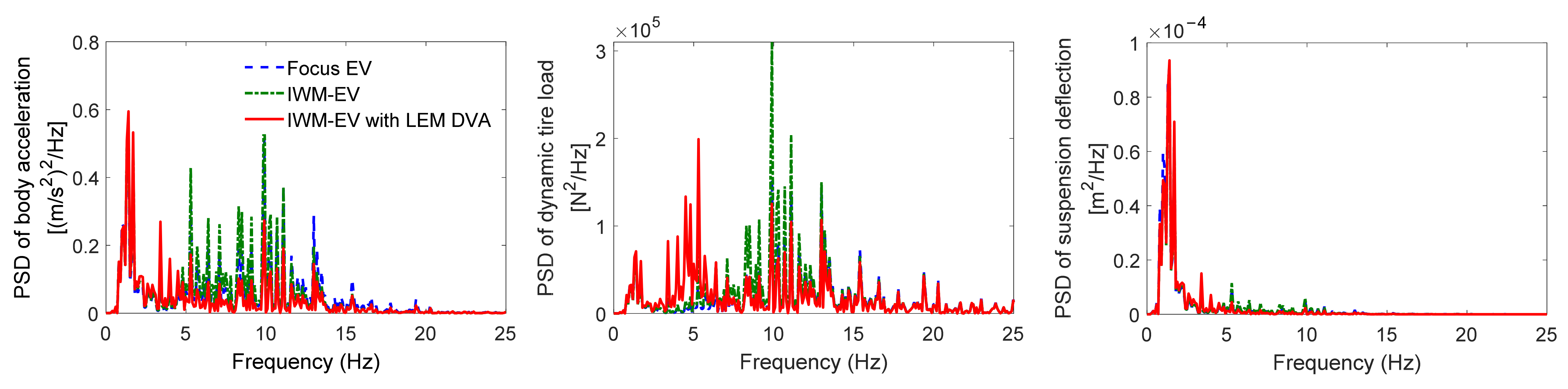
- A new coordination method, which includes an LEMD and an LEM-DVA, is proposed. The LEMD is employed to recover the mechanical power generated by suspension vibration, and LEM-DVA is used to absorb wheel vibration and convert the mechanical energy into electrical power. The optimal structural parameters of LEM-DVA are obtained, which decreases the body acceleration by 22.2% on a B-grade road compared with that of IWM-EV without LEM-DVA. Moreover, the dynamic tire load and suspension deflection are, respectively, decreased by 9.4 and 3.5%. In addition, the regeneration potential of LEMD and LEM-DVA is 63.8 and 8.26 W, respectively.
- A new structure, which integrates LEMD and LEM-DVA, is proposed to implement the coordination method. The control system is also designed. The hardware in-the-loop comparative test, including dynamic performance and energy regeneration tests, is conducted. The test results are in good agreement with that of simulation despite the existence of some errors. This finding proves the effectiveness of the new structure in coordinating the vibration energy regeneration and dynamic performance of IWM-EV.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Han, Z.; Zhao, W. Decoupling control of steering and driving system for in-wheel-motor-drive electric vehicle. Mech. Syst. Signal Process. 2018, 101, 389–404. [Google Scholar]
- Li, Z.; Zheng, L.; Gao, W.; Zhan, Z. Electromechanical Coupling Mechanism and Control Strategy for In-Wheel-Motor-Driven Electric Vehicles. IEEE Trans. Ind. Electron. 2019, 66, 4524–4533. [Google Scholar] [CrossRef]
- Wang, Q.; Li, R.; Zhu, Y.; Du, X.; Liu, Z. Integration design and parameter optimization for a novel in-wheel motor with dynamic vibration absorbers. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 459. [Google Scholar] [CrossRef]
- Yang, F.; Zhao, L.; Yu, Y.; Zhou, C. Analytical description of ride comfort and optimal damping of cushion-suspension for wheel-drive electric vehicles. Int. J. Automot. Technol. 2017, 18, 1121–1129. [Google Scholar] [CrossRef]
- Wang, Y.; Li, P.; Ren, G. Electric vehicles with in-wheel switched reluctance motors: Coupling effects between road excitation and the unbalanced radial force. J. Sound Vib. 2016, 372, 69–81. [Google Scholar] [CrossRef]
- Shao, X.; Naghdy, F.; Du, H. Reliable fuzzy H∞ control for active suspension of in-wheel motor driven electric vehicles with dynamic damping. Mech. Syst. Signal Process. 2017, 87, 365–383. [Google Scholar] [CrossRef]
- Wang, R.; Jing, H.; Yan, F.; Karimi, H.R.; Chen, N. Optimization and finite-frequency H-infinity control of active suspensions in in-wheel motor driven electric ground vehicles. J. Frankl. Inst. 2015, 352, 468–484. [Google Scholar] [CrossRef]
- Wu, H.; Zheng, L.; Li, Y. Coupling effects in hub motor and optimization for active suspension system to improve the vehicle and the motor performance. J. Sound Vib. 2020, 482, 115426. [Google Scholar] [CrossRef]
- Qin, Y.; He, C.; Shao, X.; Du, H.; Xiang, C.; Dong, M. Vibration mitigation for in-wheel switched reluctance motor driven electric vehicle with dynamic vibration absorbing structures. J. Sound Vib. 2018, 419, 249–267. [Google Scholar] [CrossRef]
- Luo, Y.; Tan, D. Study on the Dynamics of the In-Wheel Motor System. IEEE Trans. Veh. Technol. 2012, 61, 3510–3518. [Google Scholar] [CrossRef]
- Tian, M.; Gao, B. Dynamics analysis of a novel in-wheel powertrain system combined with dynamic vibration absorber. Mech. Mach. Theory 2021, 156, 104148. [Google Scholar] [CrossRef]
- Long, G.; Ding, F.; Zhang, N.; Zhang, J.; Qin, A. Regenerative active suspension system with residual energy for in-wheel motor driven electric vehicle. Appl. Energy 2020, 260, 114180. [Google Scholar] [CrossRef]
- Múčka, P. Energy-harvesting potential of automobile suspension. Veh. Syst. Dyn. 2016, 54, 1651–1670. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, K.; Wang, D.; Chen, C.; Li, X. Energy conversion mechanism and regenerative potential of vehicle suspensions. Energy 2017, 119, 961–970. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, H.; Guo, K.; Zhang, X.; Li, S.E. Electro-hydraulic damper for energy harvesting suspension: Modeling, prototyping and experimental validation. Appl. Energy 2017, 199, 1–12. [Google Scholar] [CrossRef]
- Shi, D.; Pisu, P.; Chen, L.; Wang, S.; Wang, R. Control design and fuel economy investigation of power split HEV with energy regeneration of suspension. Appl. Energy 2016, 182, 576–589. [Google Scholar] [CrossRef]
- Li, Z.; Zuo, L.; Luhrs, G.; Lin, L.; Qin, Y.-X. Electromagnetic Energy-Harvesting Shock Absorbers: Design, Modeling, and Road Tests. IEEE Trans. Veh. Technol. 2012, 62, 1065–1074. [Google Scholar] [CrossRef]
- Zuo, L.; Zhang, P. Energy harvesting, ride comfort, and road handling of regenerative vehicle suspensions. J. Vib. Acoust. 2013, 135, 011002. [Google Scholar] [CrossRef]
- Abdelkareem, M.A.A.; Xu, L.; Guo, X.; Ali, M.K.A.; Elagouz, A.; Hassan, M.A.; Essa, F.A.; Zou, J. Energy harvesting sensitivity analysis and assessment of the potential power and full car dynamics for different road modes. Mech. Syst. Signal Process. 2018, 110, 307–332. [Google Scholar] [CrossRef]
- Ding, R.; Wang, R.; Meng, X.; Chen, L. Energy consumption sensitivity analysis and energy-reduction control of hybrid electromagnetic active suspension. Mech. Syst. Signal Process. 2019, 134, 106301. [Google Scholar] [CrossRef]
- Ding, R.; Wang, R.; Meng, X.; Liu, W.; Chen, L. Intelligent switching control of hybrid electromagnetic active suspension based on road identification—ScienceDirect. Mech. Syst. Signal Process. 2021, 152, 107355. [Google Scholar] [CrossRef]
- Chen, S.; Tong, J.; Jiang, X.; Wang, Y.; Yao, M. Modeling method for non-stationary road irregularity based on modulated white noise and lookup table method. J. Traffic Transp. Eng. 2020, 20, 171–179. [Google Scholar]
- Wang, R.; Jiang, Y.; Ding, R.; Liu, W.; Meng, X.; Sun, Z. Design and experimental verification of self-powered electromagnetic vibration suppression and absorption system for in-wheel motor electric vehicles. J. Vib. Control. 2022, 28, 2544–2555. [Google Scholar] [CrossRef]
- Kopylov, S.; Chen, Z.; Abdelkareem, M.A. Back-iron design-based electromagnetic regenerative tuned mass damper. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 607–622. [Google Scholar] [CrossRef]
- Kopylov, S.; Chen, Z.; Abdelkareem, M.A.A. Implementation of an Electromagnetic Regenerative Tuned Mass Damper in a Vehicle Suspension System. IEEE Access 2020, 8, 110153–110163. [Google Scholar] [CrossRef]
- Kim, S.-S.; Okada, Y. Variable Resistance Type Energy Regenerative Damper Using Pulse Width Modulated Step-up Chopper. J. Vib. Acoust. 2001, 124, 110–115. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Description | IWM-EV | Focus EV | Units |
|---|---|---|---|---|
| ms | Sprung mass | 330 | 310 | kg |
| mu | Unsprung mass | 55 | 40 | kg |
| ks | Spring stiffness | 19,600 | 19,600 | N/m |
| kt | Tire stiffness | 200,000 | 200,000 | N/m |
| cs | Suspension damping | 1695 | 1695 | Ns/m |
| ct | Tire damping | 200 | 200 | Ns/m |
| Index | Focus EV | IWM-EV | IWM-EV with LEM-DVA |
|---|---|---|---|
| RMS of body acceleration (m/s2) | 1.11 | 1.23 | 0.96 |
| RMS of dynamic tire load (N) | 666.3 | 768.2 | 696.1 |
| RMS of suspension deflection (m) | 0.0082 | 0.0086 | 0.0083 |
| RMS of suspension regeneration potential (W) | 107.8 | 100.2 | 63.8 |
| RMS of wheel regeneration potential (W) | - | - | 8.26 |
| Parameters | Units | Description | LEMD | LEM-DVA |
|---|---|---|---|---|
| ke | V·s/m | Back EMF coefficient | 88.5 | 14.5 |
| kt | N/A | Thrust coefficient | 95.6 | 24.7 |
| R | Motor resistance | 5.1 | 1.2 | |
| L | mH | Inductance | 3.3 | 1.7 |
| Index | IWM-EV | IWM-EV with LEM-DVA |
|---|---|---|
| RMS of body acceleration (m/s2) | 1.45 | 1.12 |
| RMS of dynamic tire load (N) | 655.9 | 601.5 |
| RMS of suspension deflection (m) | 0.0081 | 0.0077 |
| RMS of suspension regenerated power (W) | 22.60 | 16.97 |
| RMS of wheel regenerated power (W) | - | 1.86 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Zhou, C.; Xiong, J. New Method to Coordinate Vibration Energy Regeneration and Dynamic Performance of In-Wheel Motor Electrical Vehicles. Energies 2023, 16, 2968. https://doi.org/10.3390/en16072968
Li C, Zhou C, Xiong J. New Method to Coordinate Vibration Energy Regeneration and Dynamic Performance of In-Wheel Motor Electrical Vehicles. Energies. 2023; 16(7):2968. https://doi.org/10.3390/en16072968
Chicago/Turabian StyleLi, Chongchong, Changyu Zhou, and Jiangyong Xiong. 2023. "New Method to Coordinate Vibration Energy Regeneration and Dynamic Performance of In-Wheel Motor Electrical Vehicles" Energies 16, no. 7: 2968. https://doi.org/10.3390/en16072968