
Supercapacitor Energy Storages in Hybrid Power Supplies for Frequency-Controlled Electric Drives: Review of Topologies and Automatic Control Systems †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
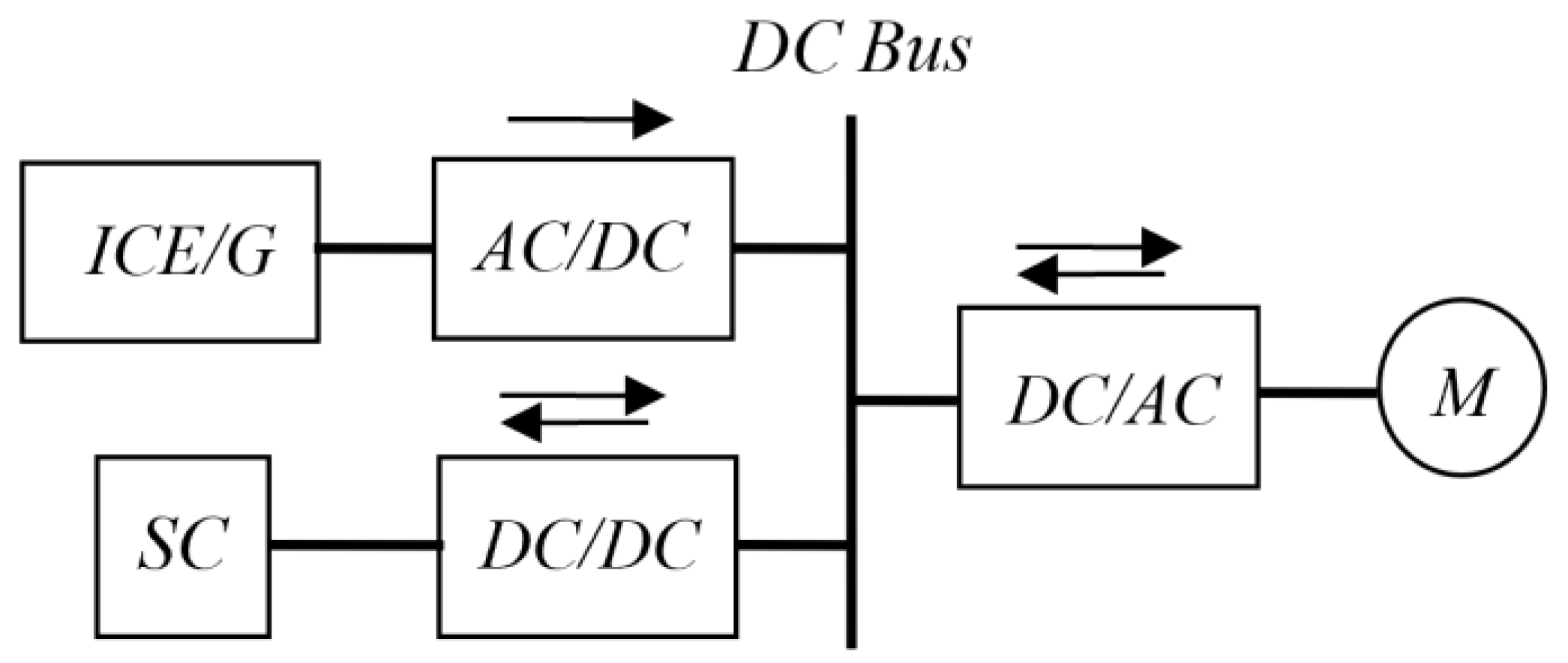
2. Topologies of Hybrid Power Supplies for Vehicle Electric Drives
2.1. Hybrid Power Supplies for Electric Drives of Electric Vehicles
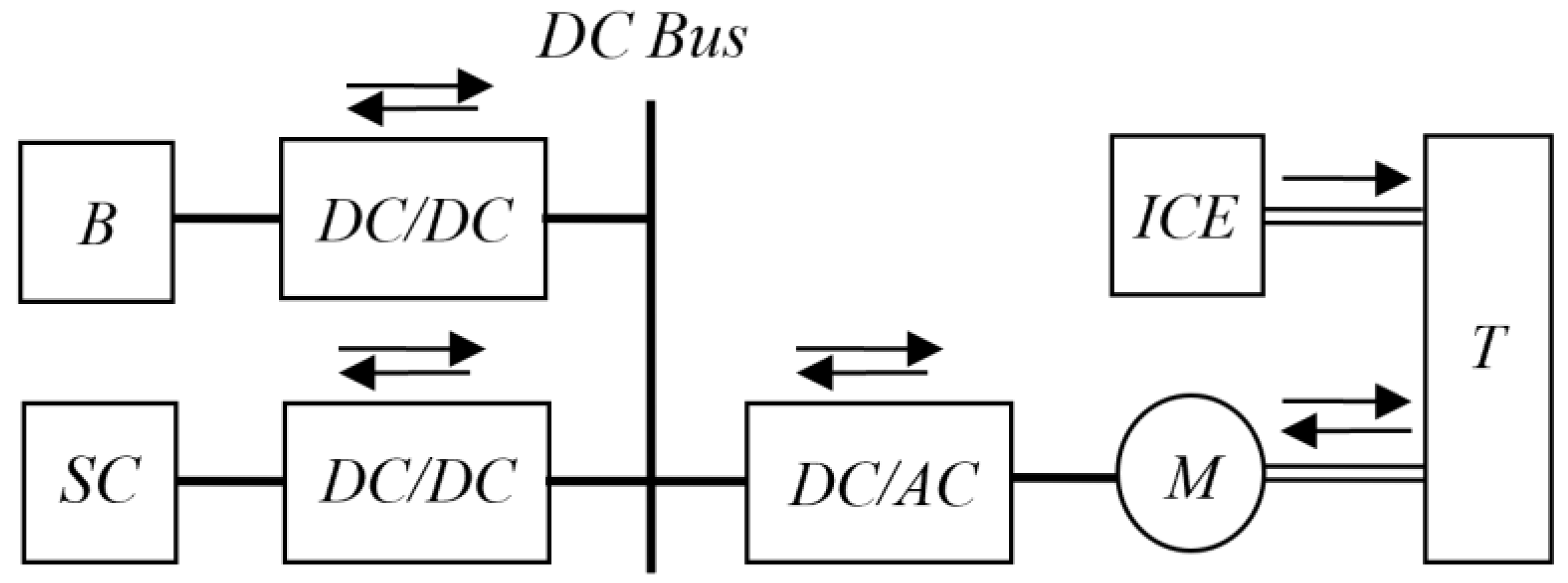
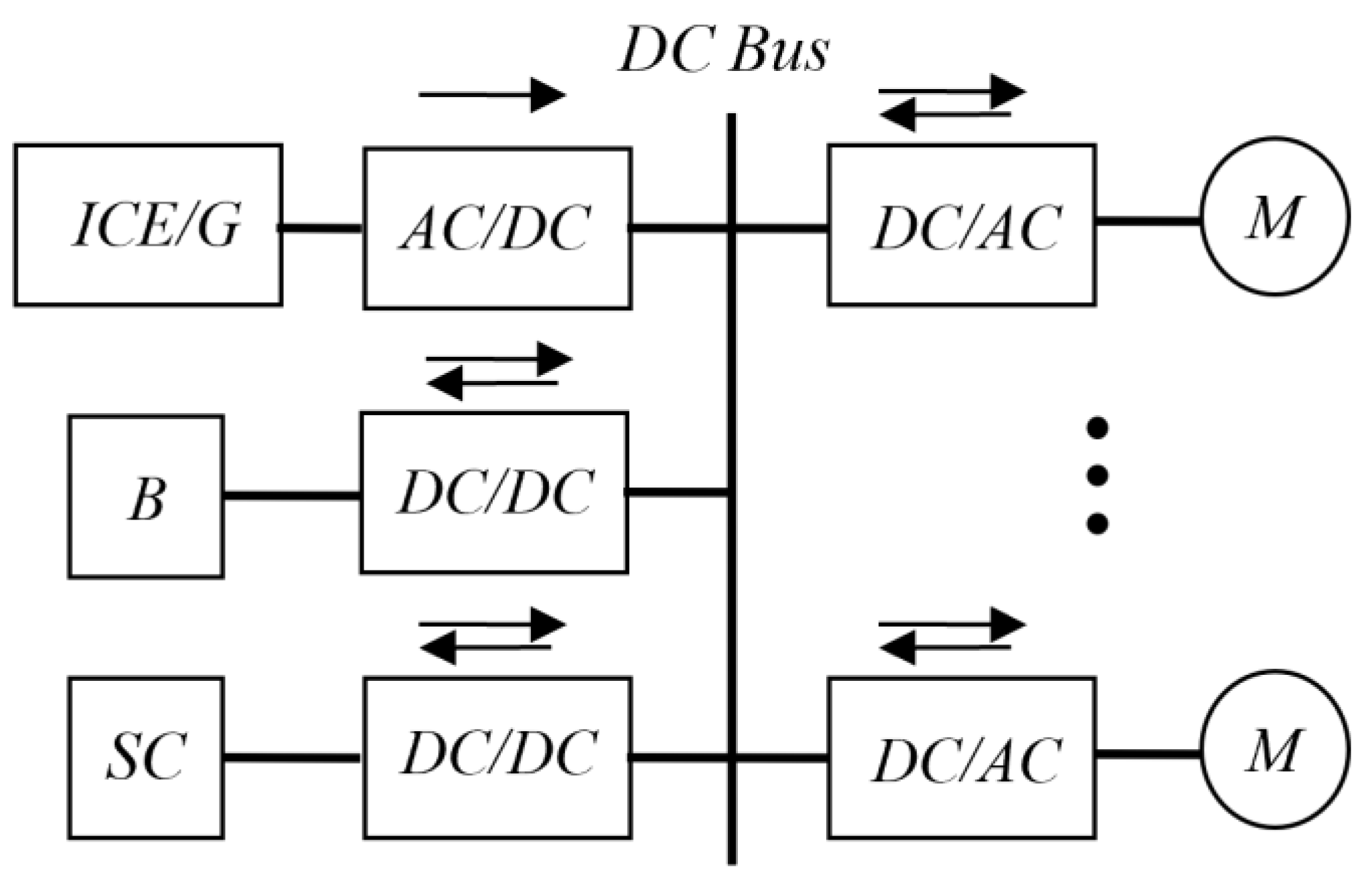
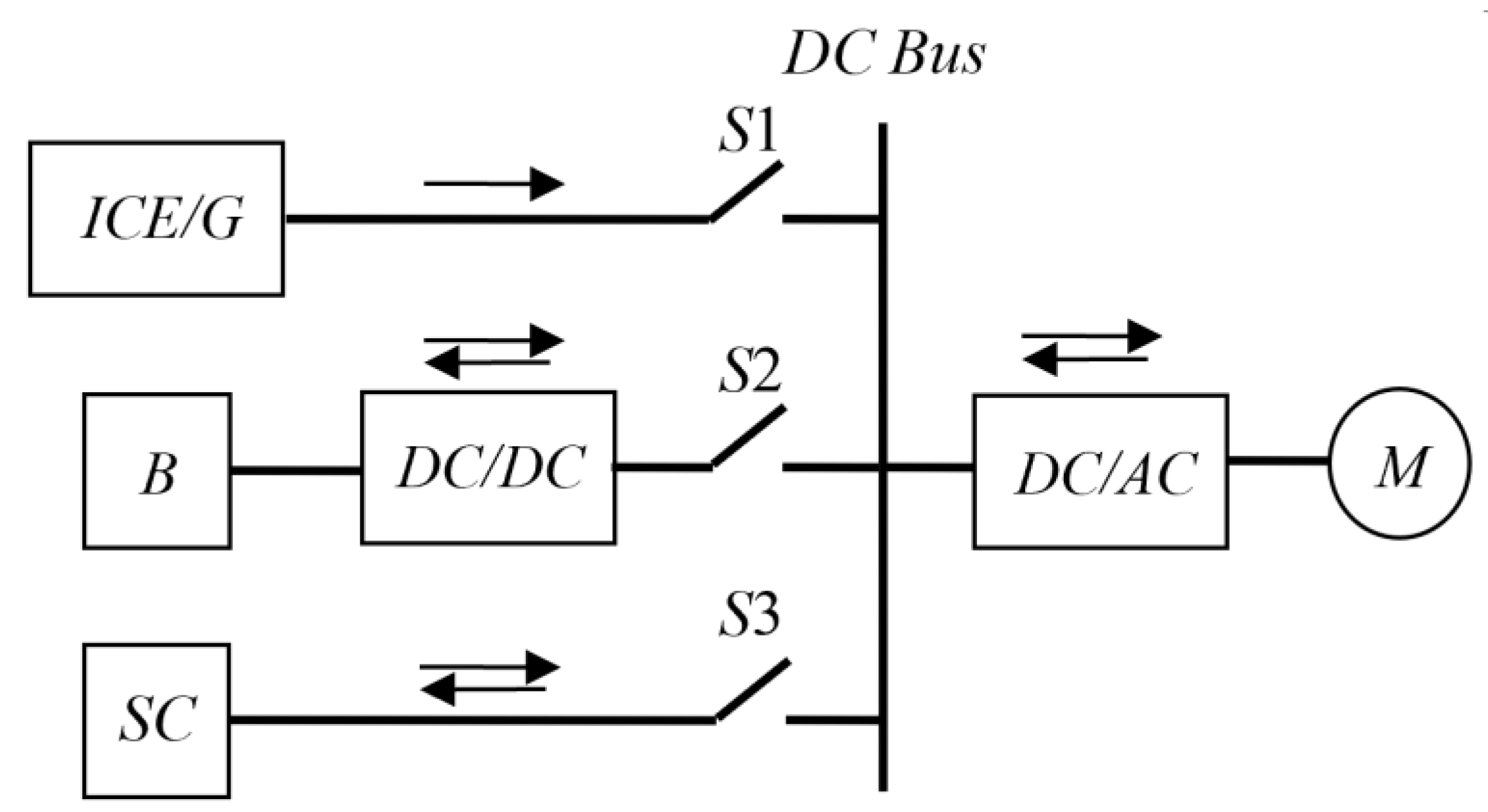
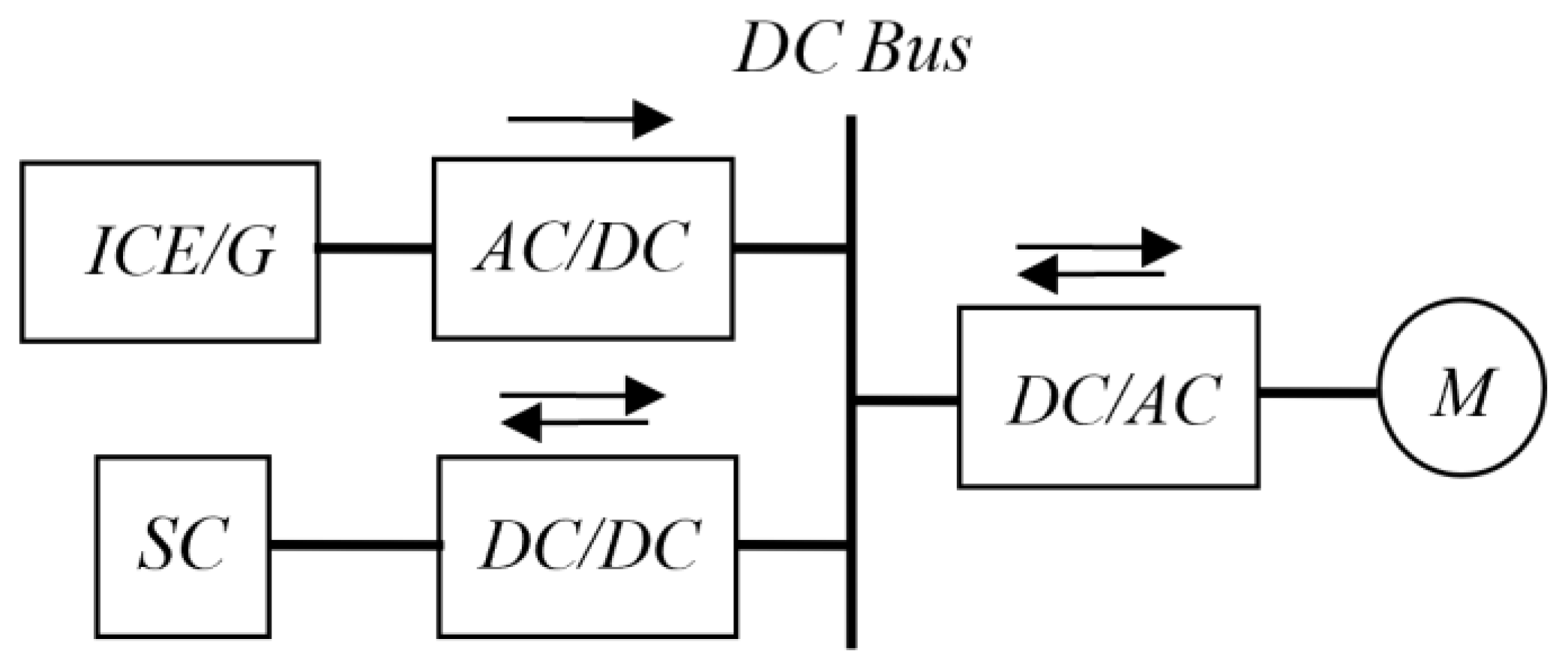
2.1.1. Structures of Hybrid Power Supplies with an Internal Combustion Engine as the Main Energy Source
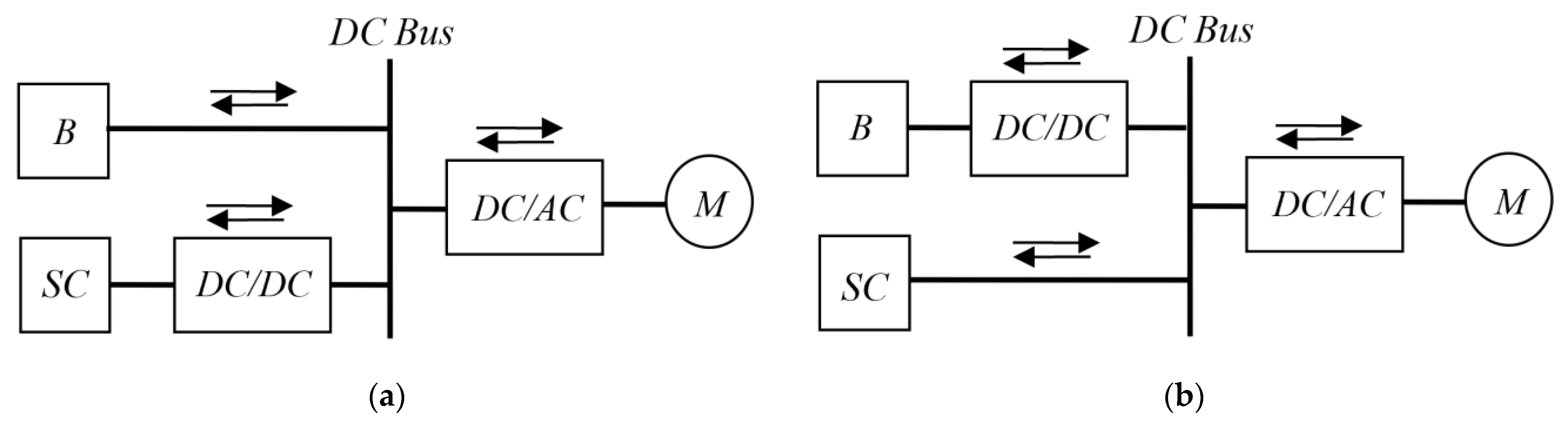
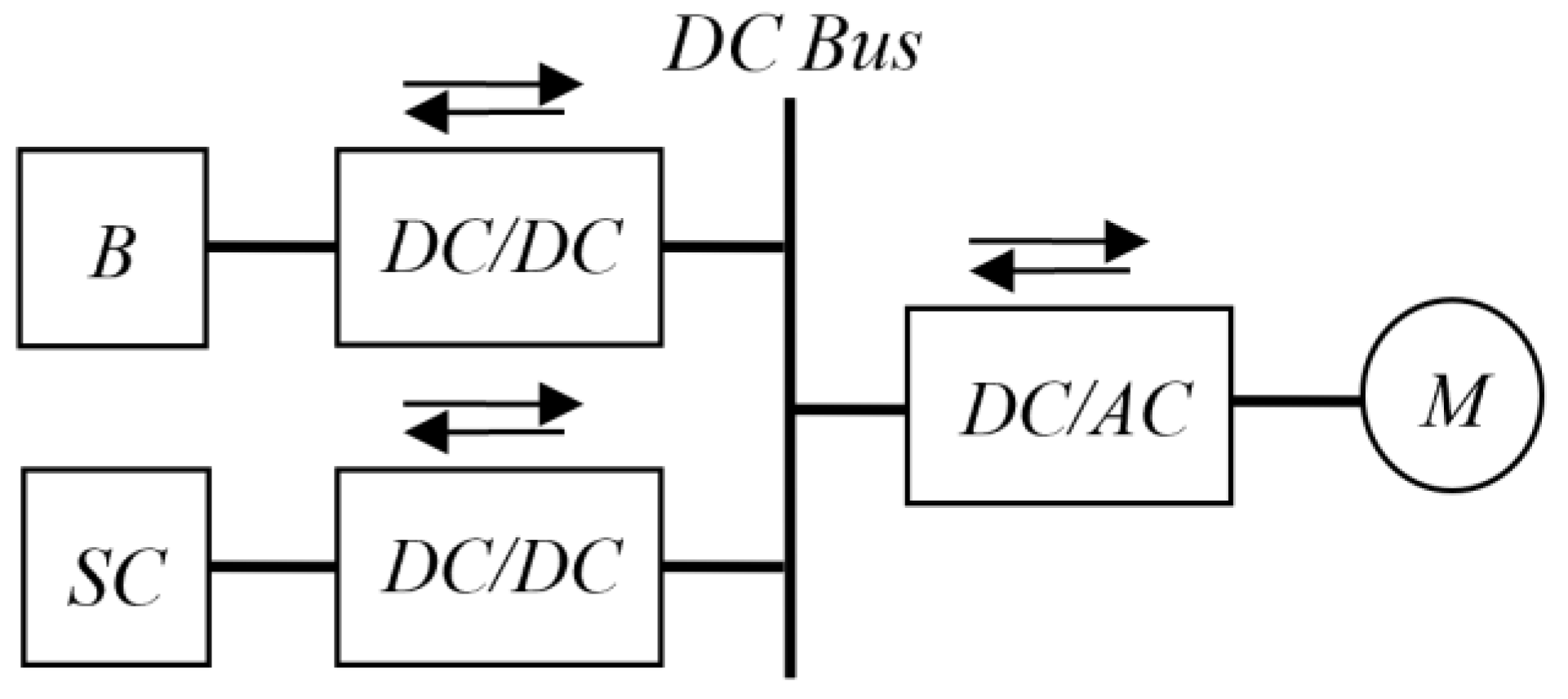
2.1.2. Structures of Hybrid Power Supplies with a Storage Battery as the Main Energy Source
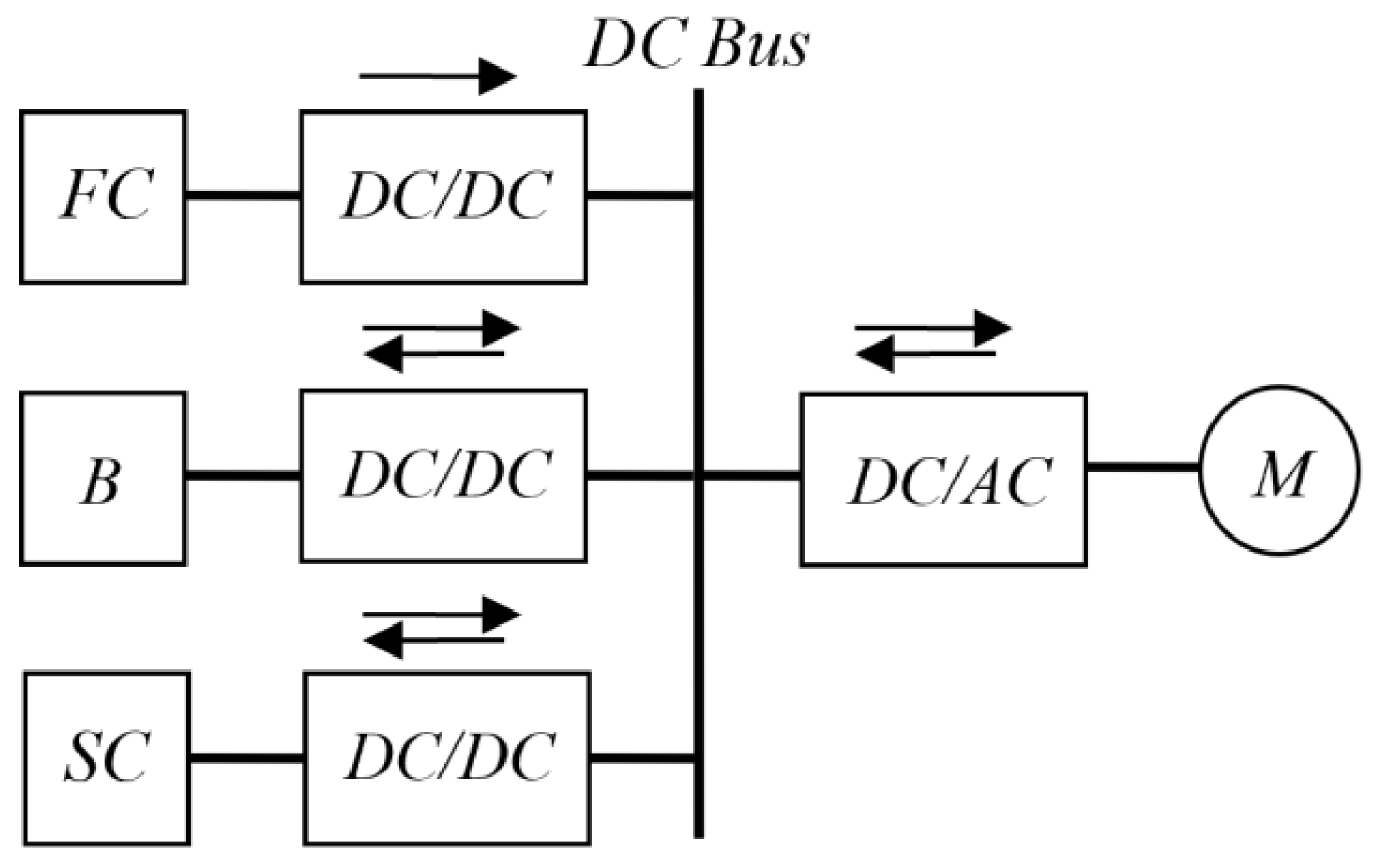
2.1.3. Structures of Hybrid Power Supplies with a Fuel Cell as the Main Energy Source
- The fuel cell provides less current during transient operation;
- The fuel cell’s service life is increased;
- The energy autonomy of a hybrid vehicle is increased.
2.2. Hybrid Power Supplies for Public Transport Vehicles
2.3. Hybrid Power Supplies for Electric Drives of General Industrial Mechanisms
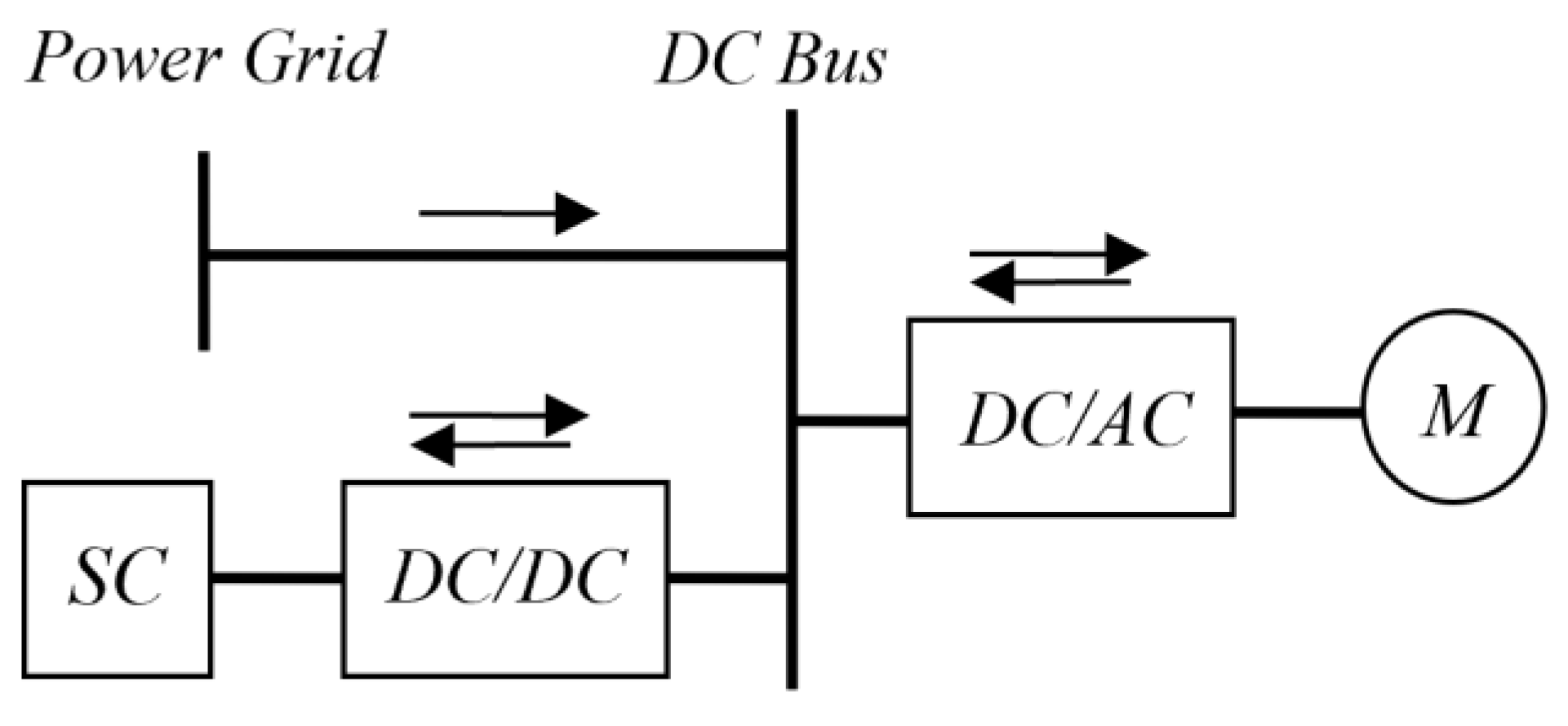
2.3.1. Hybrid Power Supplies for Crane Electric Drives
- The possibility of maintaining a continuous electric power supply to the system is improved;
- System functionality, including the braking ability, is not related to network reliability;
- The mains peak power can be regulated, and the influence of the drive on the network is greatly reduced. This is especially important in the case of a weak power supply [37].
2.3.2. Hybrid Power Supplies for Electric Drives of Lifts
- The existence of peak power, the ratio of which to average power can exceed a tenfold value [49];
- The reliability of lifts.
2.4. Discussion
- With appropriate management of the distribution of the energy flow of sources, smoothing the peaks of power consumption from the main energy source can be ensured;
- Stabilisation of the voltage level of the main source when the drive load changes;
- Lower operating costs;
- Energy quality problems, which arise if the regenerated energy is fed into the local grid, can be avoided.
3. Auxiliary Power Topologies
3.1. DC-to-DC Boost Converter Topology
3.2. Topologies of DC-DC Buck-Boost Converters with a Single-Phase Conversion Method
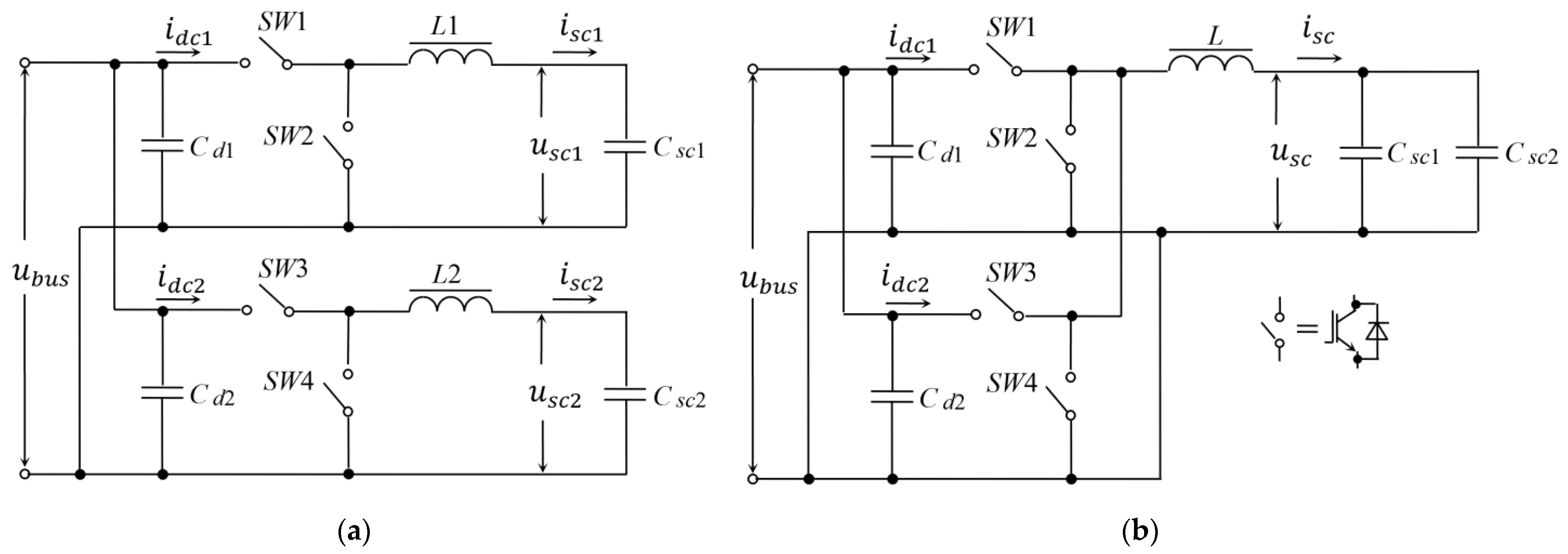
3.3. Topologies of Multiphase Up/Down Converters
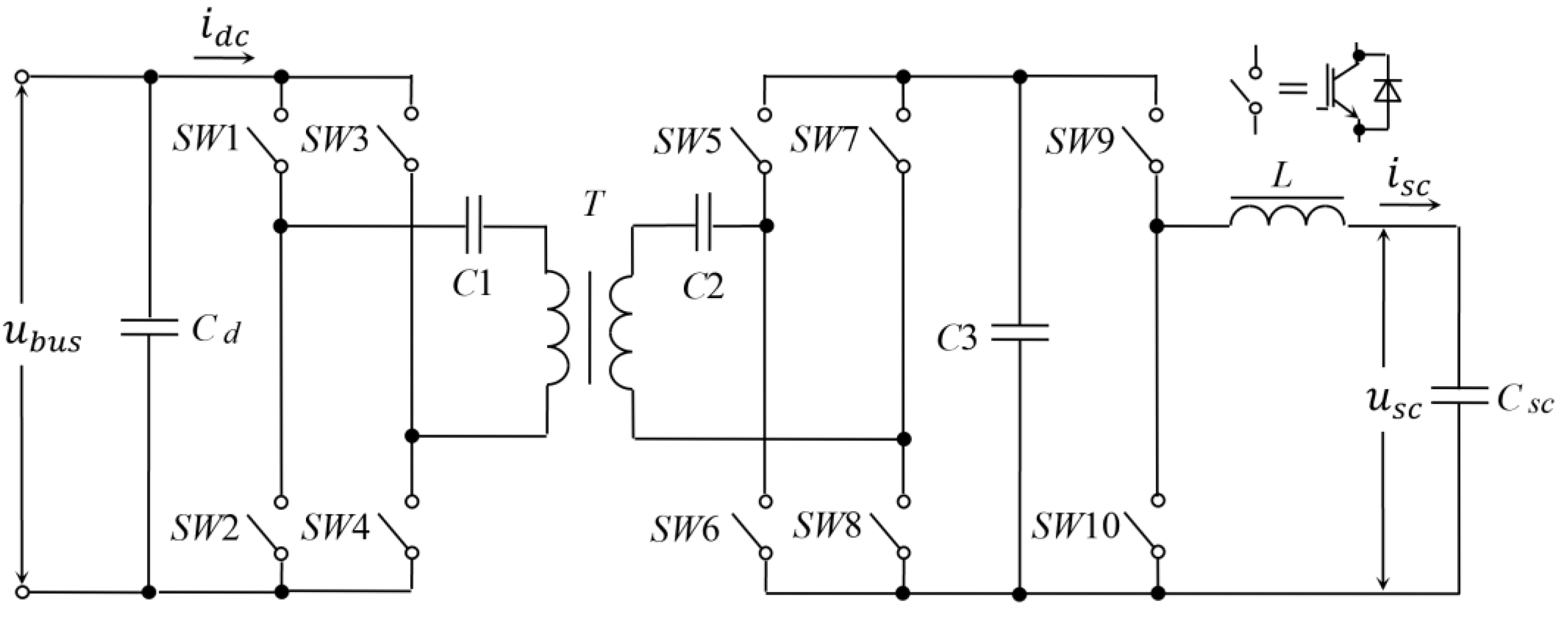
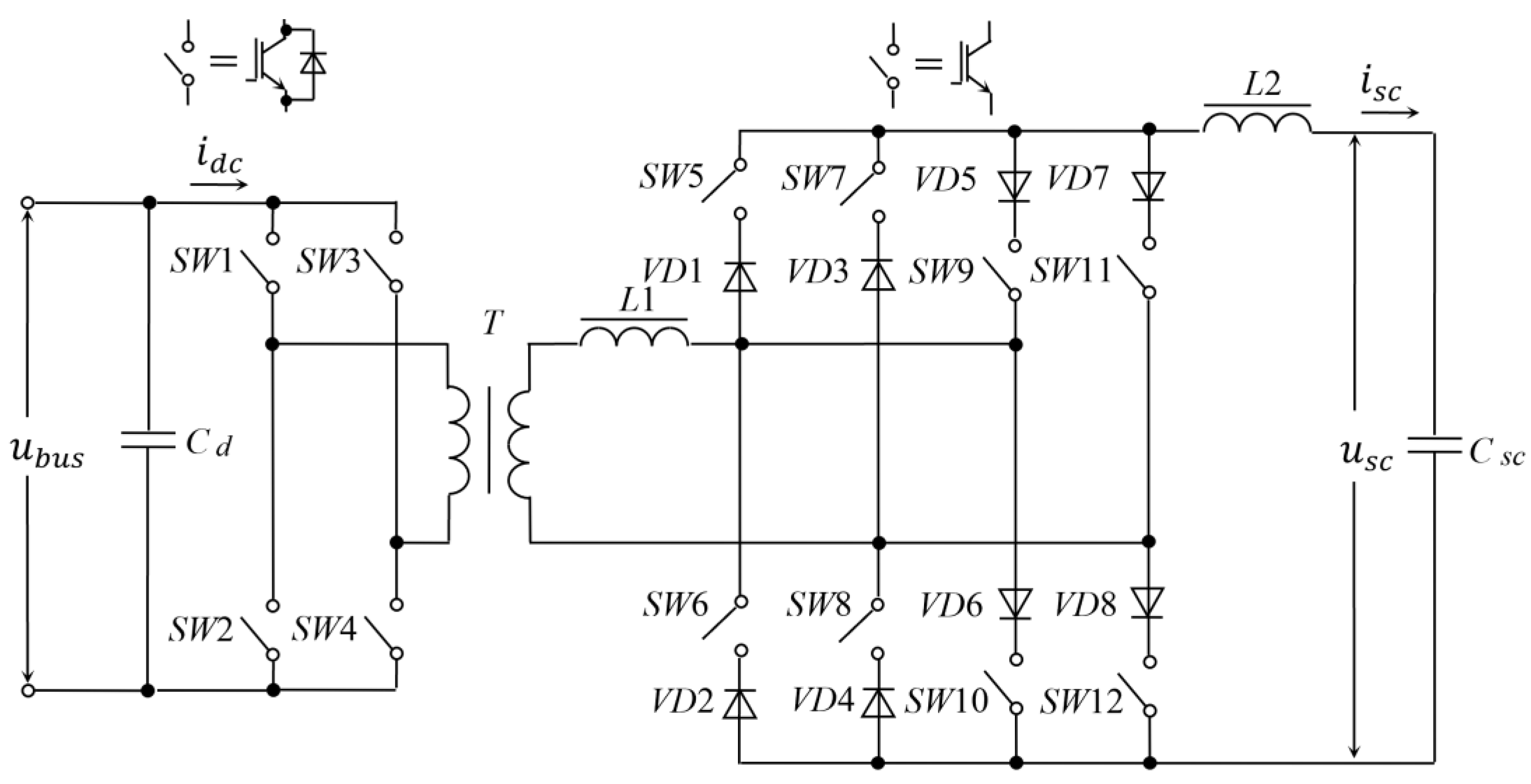
3.4. Topologies of Up/Down DC-to-DC Converters with Voltage Level Adaptation via a Transformer
3.5. Discussion
4. Structures of Control Systems for Auxiliary Power Sources with Supercapacitors
4.1. Composition and Principles of Regulation of Variable Single-Circuit Automatic Control Systems
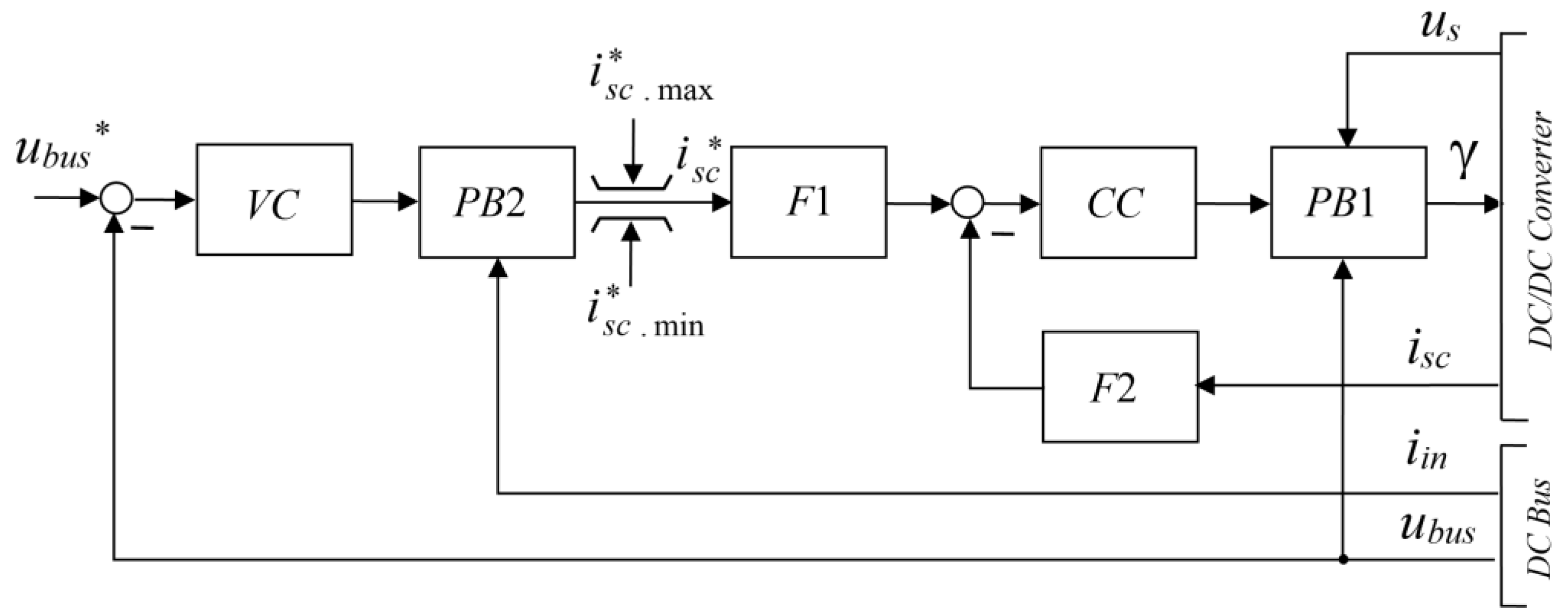
4.2. Composition and Principles of Regulation of Variable Two-Circuit Automatic Control Systems
- Charge/discharge of supercapacitors during engine braking/acceleration;
- Prohibition of charging supercapacitors if the voltage is higher than the maximum value, and prohibition of discharging supercapacitors if the voltage falls below the minimum value;
- Limiting the discharge/charge current of supercapacitors at the level of the highest allowable current;
- Stabilisation of the DC link voltage.
- Monitoring the voltage on the DC bus to avoid excessive voltage surge when the drive is decelerating;
- Use of the energy recovered during the braking phase to reduce the energy given off by the network and increase the electric drive’s overall efficiency.
- Charging mode, in which the main source supplies energy to the auxiliary source and the load;
- Discharge mode, in which both the main and auxiliary sources supply energy to the load;
- Recovery mode, in which the load supplies energy to the energy storage device.
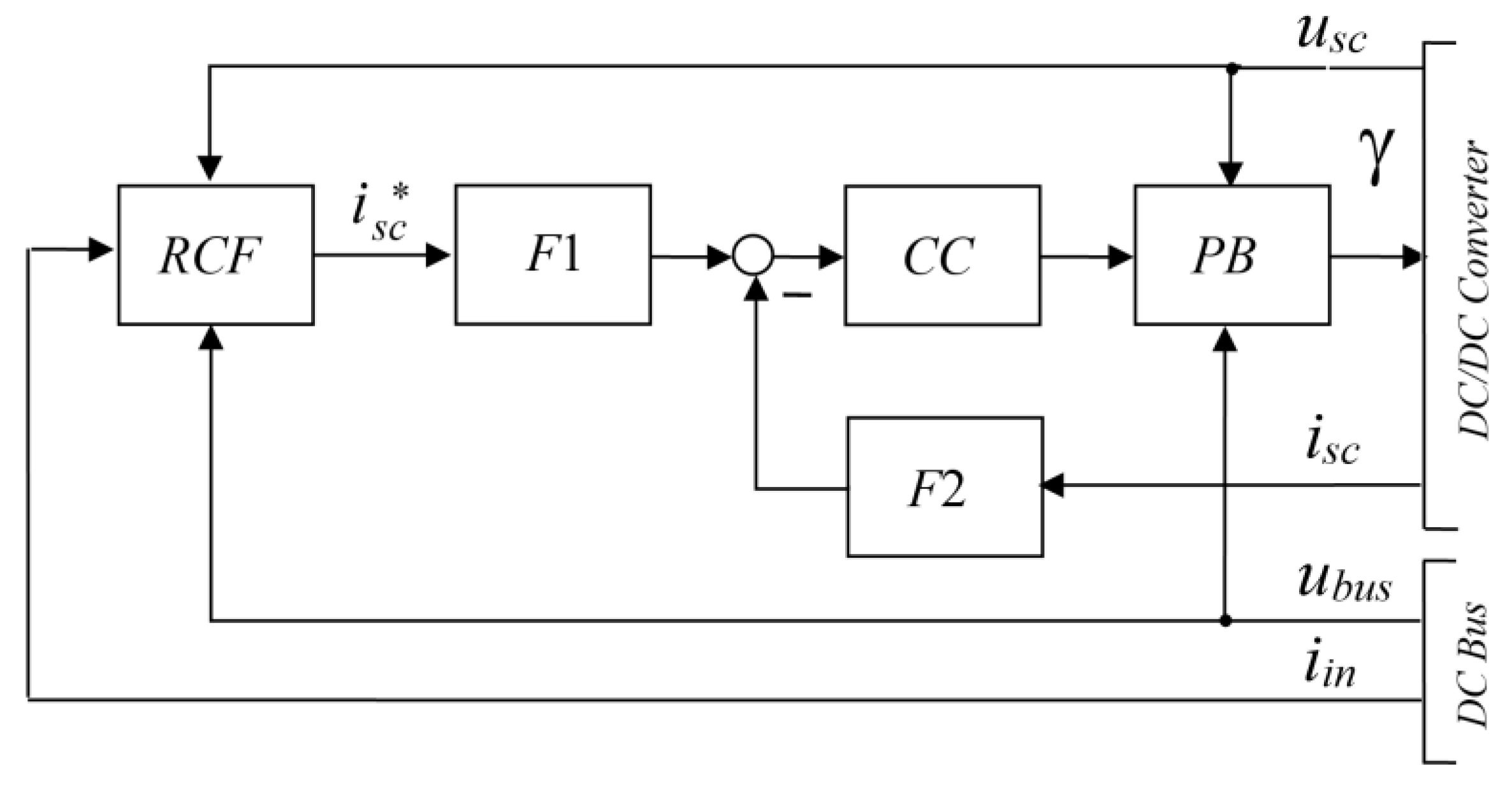
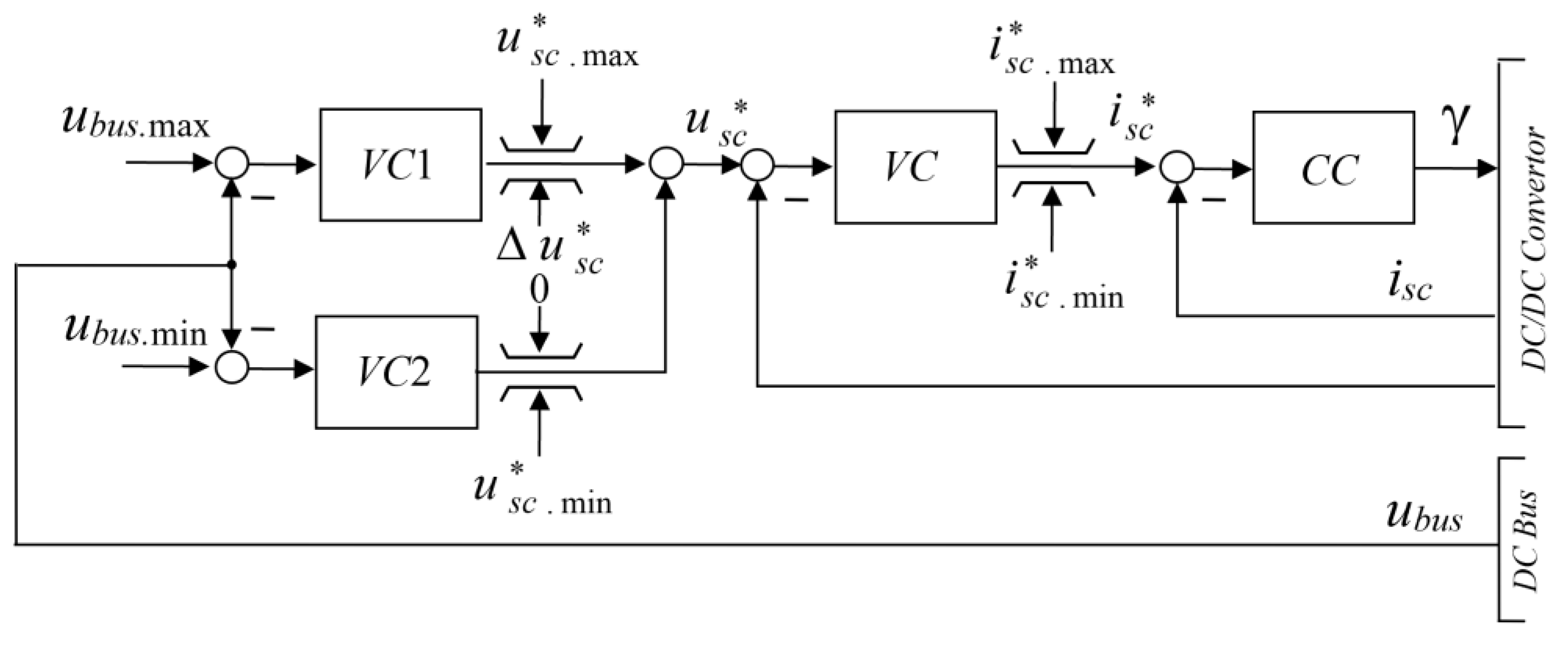
4.3. Composition and Principles of Regulation of Variable Three-Loop Automatic Control Systems
- Mains power mode;
- Braking and driving modes from the supercapacitors;
- Ride-through mode.
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Denshchikov, K.K. Combined power plants based on supercapacitors. In Proceedings of the Conference of the JIHT RAS “Results of fundamental research in the field of energy and their practical significance”, Moscow, Russian, 17–24 August 2008. [Google Scholar]
- Arnet, B.J. A Contribution to the Design and Control of Electric Vehicle Drives; (No. THESIS); EPFL: Lausanne, Switzerland, 1998. [Google Scholar]
- Ivanov, A.M.; Gerasimov, A.F. Molecular energy storage devices based on a double electric layer. Electricity 1991, 8, 16–19. [Google Scholar]
- Ehsani, M.; Gao, Y.; Emadi, A. Modern electric hybrid electric and fuel cell vehicles: Fundamentals. In Theory and Design; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Chan, C.C.; Wong, Y.S. Electric vehicles charge forward. IEEE Power Energy Mag. 2004, 2, 24–33. [Google Scholar] [CrossRef]
- United States Environmental Protection Agency EPA. Sources of Green-House Gas Emissions. Available online: https://www.epa.gov/ghgemissions/sources-greenhouse-gas-emissions (accessed on 28 December 2022).
- Kumar, K.A.R.; Sreedevi, M.L.; Mineeshma, G.R.; Chacko, R.V.; Amal, S. Hybrid energy storage system interface for electric vehicles. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, 2–4 January 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Van Mierlo, J.; Timmermans, J.M.; Maggetto, G.; Van den Bossche, P.; Meyer, S.; Hecq, W.; Verlaak, J. Environmental rating of vehicles with different alternative fuels and drive trains: A comparison of two approaches. Transp. Res. Part D Transp. Environ. 2004, 9, 387–399. [Google Scholar] [CrossRef]
- Van Mierlo, J.; Favrel, V.; Meyer, S.; Hecq, W. How to Define Clean Vehicles? Environmental Impact Rating of Vehicles. Int. J. Automot. Technol. 2004, 4, 11. [Google Scholar]
- Korotkova, S.D.; Matyash, E.I. Environmental friendliness of public electric transport—Reality or myth? Sci. Today Glob. Chall. Dev. Mech. 2018, 42, Page range. [Google Scholar]
- Bobba, P.B.; Rajagopal, K.R. Modeling and analysis of hybrid energy storage systems used in electric vehicles. In Proceedings of the 2012 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Bengaluru, India, 16–19 December 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Emadi, A.; Rajashekara, K.; Williamson, S.S.; Lukic, S.M. Topological overview of hybrid electric and fuel cell vehicular power system architectures and configurations. IEEE Trans. Veh. Technol. 2005, 54, 763–770. [Google Scholar] [CrossRef]
- Cao, J.; Emadi, A. A new battery/ultracapacitor hybrid energy storage system for electric, hybrid, and plug-in hybrid electric vehicles. IEEE Trans. Power Electron. 2011, 27, 122–132. [Google Scholar] [CrossRef]
- Yu, H.; Cui, S.; Wang, T. Simulation and performance analysis on an energy storage system for hybrid electric vehicle using ultracapacitor. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, W.; Zhu, J.; Guo, Y.; Li, Y.; Wang, Y.; Wang, S. Performance analysis of electric machine drives for plug-in hybrid electric vehicles. In Proceedings of the 2009 International Conference on Applied Superconductivity and Electromagnetic Devices, Chengdu, China, 25–27 September 2009; pp. 60–63. [Google Scholar] [CrossRef] [Green Version]
- Yoo, H.; Sul, S.K.; Park, Y.; Jeong, J. System integration and power-flow management for a series hybrid electric vehicle using supercapacitors and batteries. IEEE Trans. Ind. Appl. 2008, 44, 108–114. [Google Scholar] [CrossRef]
- Cui, S.-M.; Tian, D.-W.; Zhang, Q.-F. Study of hybrid energy control strategy for hybrid electric drive system in all electric combat vehicles. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Rudolph, C. Hybrid drive system of an industrial truck using a three-phase DC-DC converter feeding ultra-capacitors. In Proceedings of the 2009 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–10. [Google Scholar]
- Tani, A.; Camara, M.B.; Dakyo, B. Energy management based on frequency approach for hybrid electric vehicle applications: Fuel-cell/lithium-battery and ultracapacitors. IEEE Trans. Veh. Technol. 2012, 61, 3375–3386. [Google Scholar] [CrossRef]
- Huang, X.; Tosiyoki, H.; Yoichi, H. System design and converter control for super capacitor and battery hybrid energy system of compact electric vehicles. In Proceedings of the 2014 16th European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; pp. 1–10. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, Q.; Zhu, C. Design of battery and ultracapacitor multiple energy storage in hybrid electric vehicle. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; pp. 1395–1398. [Google Scholar] [CrossRef]
- Lopez, M.; Perez, M.A.; Kouro, S. Current control of interleaved dc-dc converter in continuous and discontinuous mode. In Proceedings of the 2018 IEEE International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Nottingham, UK, 7–9 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Tani, A.; Camara, M.B.; Dakyo, B.; Azzouz, Y. DC/DC and DC/AC converters control for hybrid electric vehicles energy management-ultracapacitors and fuel cell. IEEE Trans. Ind. Inform. 2012, 9, 686–696. [Google Scholar] [CrossRef]
- Khan, M.S.; Ahmad, I.; Armaghan, H.; Ali, N. Backstepping sliding mode control of FC-UC based hybrid electric vehicle. IEEE Access 2018, 6, 77202–77211. [Google Scholar] [CrossRef]
- Becherif, M.; Ayad, M.Y.; Miraoui, A. Modeling and passivity-based control of hybrid sources: Fuel cell and supercapacitors. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006; Volume 3, pp. 1134–1139. [Google Scholar] [CrossRef]
- Ayad, M.Y.; Becherif, M.; Djerdir, A.; Miraoui, A. Sliding mode control of DC bus voltage of a hybrid sources using fuel cell and supercapacitors for traction system. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 383–388. [Google Scholar] [CrossRef]
- Camara, M.B.; Gualous, H.; Gustin, F.; Berthon, A. Design and new control of DC/DC converters to share energy between supercapacitors and batteries in hybrid vehicles. IEEE Trans. Veh. Technol. 2008, 57, 2721–2735. [Google Scholar] [CrossRef]
- Liu, X.; Diallo, D.; Marchand, C. Cycle-based design methodology of hybrid electric vehicle powertrain: Application to fuel cell vehicles. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; pp. 1853–1857. [Google Scholar] [CrossRef]
- Steiner, M.; Klohr, M.; Pagiela, S. Energy storage system with ultracaps on board of railway vehicles. In Proceedings of the 2007 European conference on power electronics and applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–10. [Google Scholar] [CrossRef]
- Steiner, M.; Scholten, J. Energy storage on board of DC fed railway vehicles PESC 2004 conference in Aachen, Germany. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; Volume 1, pp. 666–671. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Tricoli, P. Metro trains equipped onboard with supercapacitors: A control technique for energy saving. In Proceedings of the SPEEDAM 2010, Pisa, Italy, 14–16 June 2010; pp. 750–756. [Google Scholar] [CrossRef] [Green Version]
- Steiner, M.; Scholten, J. Energy storage on board of railway vehicles. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar] [CrossRef]
- Barrero, R.; Tackoen, X.; Van Mierlo, J. Improving energy efficiency in public transport: Stationary supercapacitor based Energy Storage Systems for a metro network. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–8. [Google Scholar] [CrossRef]
- Mir, L.; Etxeberria-Otadui, I.; de Arenaza, I.P.; Sarasola, I.; Nieva, T. A supercapacitor based light rail vehicle: System design and operations modes. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 1632–1639. [Google Scholar] [CrossRef]
- Grbovic, P.J.; Delarue, P.; Le Moigne, P.; Bartholomeus, P. A three-terminal ultracapacitor-based energy storage and PFC device for regenerative controlled electric drives. IEEE Trans. Ind. Electron. 2011, 59, 301–316. [Google Scholar] [CrossRef]
- Bellache, K.; Camara, M.B.; Dakyo, B. Transient power control for diesel-generator assistance in electric boat applications using supercapacitors and batteries. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 6, 416–428. [Google Scholar] [CrossRef]
- Bolonne, S.R.; Chandima, D.P. Sizing an energy system for hybrid li-ion battery-supercapacitor RTG cranes based on state machine energy controller. IEEE Access 2019, 7, 71209–71220. [Google Scholar] [CrossRef]
- Grbovic, P.J.; Delarue, P.; Le Moigne, P.; Bartholomeus, P. The ultracapacitor-based regenerative controlled electric drives with power-smoothing capability. IEEE Trans. Ind. Electron. 2012, 59, 4511–4522. [Google Scholar] [CrossRef]
- Von Jouanne, A.; Enjeti, P.N.; Banerjee, B. Assessment of ride-through alternatives for adjustable-speed drives. IEEE Trans. Ind. Appl. 1999, 35, 908–916. [Google Scholar] [CrossRef]
- Yang, Y.C.; Chang, W.M. Impacts of electric rubber-tired gantries on green port performance. Res. Transp. Bus. Manag. 2013, 8, 67–76. [Google Scholar] [CrossRef]
- Kim, S.M.; Sul, S.K. Control of rubber tyred gantry crane with energy storage based on supercapacitor bank. IEEE Trans. Power Electron. 2006, 21, 1420–1427. [Google Scholar] [CrossRef]
- Kermani, M.; Parise, G.; Chavdarian, B.; Martirano, L. Ultracapacitors for port crane applications: Sizing and techno-economic analysis. Energies 2020, 13, 2091. [Google Scholar] [CrossRef]
- Luque, A.; Harrison, I.; Pietrosanti, S.; Alasali, F.M.M.; Holderbaum, W.; Mayer, R.M.; Becerra, V.M. Energy reduction on eRTG. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Kermani, M.; Shirdare, E.; Parise, G.; Bongiorno, M.; Martirano, L. A Comprehensive Techno-economic Solution for Demand Control in Ports: Energy Storage Systems Integration. IEEE Trans. Ind. Appl. 2022, 58, 1592–1601. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Piegari, L.; Tricoli, P. Use of supercapacitors for energy saving in overhead travelling crane drives. In Proceedings of the 2009 International Conference on Clean Electrical Power, Capri, Italy, 9–11 June 2009; pp. 562–568. [Google Scholar] [CrossRef]
- Di Napoli, A.; Ndokaj, A. Ultracapacitor storage for a 50t capacity gantry crane. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 2014–2018. [Google Scholar] [CrossRef]
- Kermani, M.; Parise, G.; Martirano, L.; Parise, L.; Chavdarian, B. Utilization of Regenerative Energy by Ultracapacitor Sizing for Peak Shaving in STS Crane. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Genova, Italy, 11–14 June 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Pasquali, M.; Tricoli, P.; Villante, C. Testing methodologies of supercapacitors for load-leveling purposes in industrial applications. In Proceedings of the 2011 International Conference on Clean Electrical Power (ICCEP), Ischia, Italy, 14–16 June 2011; pp. 395–399. [Google Scholar] [CrossRef]
- Rufer, A.; Barrade, P. A supercapacitor-based energy-storage system for elevators with soft commutated interface. IEEE Trans. Ind. Appl. 2002, 38, 1151–1159. [Google Scholar] [CrossRef]
- Shreelakshmi, M.P.; Agarwal, V. An energy efficient and environment friendly elevator system using ultracapacitor and fuel cell with power factor correction. In Proceedings of the 2013 IEEE ECCE Asia Downunder, Melbourne, VIC, Australia, 3–6 June 2013; pp. 721–727. [Google Scholar] [CrossRef]
- Kubade, P.; Umathe, S.K. Enhancing an elevator efficiency by using supercapacitor. In Proceedings of the 2017 Third International Conference on Advances in Electrical, Electronics, Information, Communication and Bio-Informatics (AEEICB), Chennai, India, 27–28 February 2017; pp. 502–505. [Google Scholar] [CrossRef]
- Plotnikov, I.; Braslavsky, I.; Yeltsin, B.N.; Ishmatov, Z. About using the frequency-controlled electric drives with supercapacitors in the hoisting applications. In Proceedings of the 2015 International Siberian Conference on Control and Communications (SIBCON), Omsk, Russia, 21–23 May 2015; pp. 1–9. [Google Scholar] [CrossRef]
- Li, Z.; Ruan, Y. A novel energy saving control system for elevator based on supercapacitor bank using fuzzy logic. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 2717–2722. [Google Scholar]
- Kim, J.; Han, Z.; Huang, P.; O’Donnell, D.; Kar, N.C. Comparative analysis of the utilization of supercapacitor versus grid-tie inverter regenerative braking methods for elevator systems. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 2535–2540. [Google Scholar] [CrossRef]
- Tominaga, S.; Suga, I.; Araki, H.; Ikejima, H.; Kusuma, M.; Kobayashi, K. Development of energy-saving elevator using regenerated power storage system. In Proceedings of the Power Conversion Conference-Osaka 2002 (Cat. No. 02TH8579), Osaka, Japan, 2–5 April 2002; Volume 2, pp. 890–895. [Google Scholar] [CrossRef]
- Jabbour, N.; Mademlis, C.; Kioskeridis, I. Improved performance in a supercapacitor-based energy storage control system with bidirectional DC-DC converter for elevator motor drives. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Jabbour, N.; Mademlis, C. Supercapacitor-based energy recovery system with improved power control and energy management for elevator applications. IEEE Trans. Power Electron. 2017, 32, 9389–9399. [Google Scholar] [CrossRef]
- Kulkarni, A.B.; Nguyen, H.; Gaudet, E.W. A comparative evaluation of fine regenerative and nonregenerative vector controlled drives for AC gearless elevators. In Proceedings of the Conference Record of the 2000 IEEE Industry Applications Conference. Thirty-Fifth IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy (Cat. No. 00CH37129), Rome, Italy, 8–12 October 2000; Volume 3, pp. 1431–1437. [Google Scholar] [CrossRef]
- Kafalis, K.; Karlis, A.D. Supercapacitors based energy saving mode of electromechanical elevator’s operation. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 1208–1214. [Google Scholar] [CrossRef]
- Chakraborty, S.; Vu, H.N.; Hasan, M.M.; Tran, D.D.; Baghdadi, M.E.; Hegazy, O. DC-DC converter topologies for electric vehicles, plug-in hybrid electric vehicles and fast charging stations: State of the art and future trends. Energies 2019, 12, 1569. [Google Scholar] [CrossRef] [Green Version]
- De Almeida, A.T.; Ferreira, F.J.; Both, D. Technical and economical considerations in the application of variable-speed drives with electric motor systems. IEEE Trans. Ind. Appl. 2005, 41, 188–199. [Google Scholar] [CrossRef]
- Grbović, P.J.; Delarue, P.; Le Moigne, P. Interface converters for ultra-capacitor applications in power conversion systems. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; p. LS7d–1. [Google Scholar] [CrossRef]
- Lemian, D.; Bode, F. Battery-supercapacitor energy storage systems for electrical vehicles: A review. Energies 2022, 15, 5683. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, C. An integrated multifunctional bidirectional AC/DC and DC/DC converter for electric vehicles applications. Energies 2016, 9, 493. [Google Scholar] [CrossRef] [Green Version]
- Grbović, P.J.; Delarue, P.; Le Moigne, P.; Bartholomeus, P. A bidirectional three-level DC–DC converter for the ultracapacitor applications. IEEE Trans. Ind. Electron. 2009, 57, 3415–3430. [Google Scholar] [CrossRef]
- Camara, M.B.; Gualous, H.; Dakyo, B.; Nichita, C.; Makany, P. Buck-Boost converters design for Ultracapacitors and lithium Battery mixing in Hybrid Vehicle Applications. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Bausière, R.; Labrique, F.; Séguier, G. Power Electronic Converters—DC-DC Conversion; Springer: Berlin, Germany, 1993; 434p. [Google Scholar] [CrossRef]
- Choi, B. Comparative study on paralleling schemes of converter modules for distributed power applications. IEEE Trans. Ind. Electron. 1998, 45, 194–199. [Google Scholar] [CrossRef]
- Zumel, P.; Garcia, O.; Cobos, J.A.; Uceda, J. Magnetic integration for interleaved converters. In Proceedings of the Eighteenth Annual IEEE Appl. Power Electron. Conf. Expo. 2003, 2, 1143–1149. [Google Scholar] [CrossRef]
- Silva, D.F.; Pomilio, J.A.; Villalva, M.G. Hybrid energy storage system and control strategy for an electric urban bus. In Proceedings of the 2018 13th IEEE International Conference on Industry Applications (INDUSCON), Sao Paulo, Brazil, 12–14 November 2018; pp. 453–458. [Google Scholar] [CrossRef]
- Ciccarelli, F.; Del Pizzo, A.; Iannuzzi, D. Improvement of energy efficiency in light railway vehicles based on power management control of wayside lithium-ion capacitor storage. IEEE Trans. Power Electron. 2013, 29, 275–286. [Google Scholar] [CrossRef]
- Amjadi, Z.; Williamson, S.S. Novel control strategy design for multiple hybrid electric vehicle energy storage systems. In Proceedings of the 2009 Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 February 2009; pp. 597–602. [Google Scholar] [CrossRef]
- Abdel-baqi, O.; Nasiri, A.; Miller, P. Dynamic performance improvement and peak power limiting using ultracapacitor storage system for hydraulic mining shovels. IEEE Trans. Ind. Electron. 2014, 62, 3173–3181. [Google Scholar] [CrossRef]
- Wang, J.; Peng, R.; Cai, C.; Yu, H.; Chen, M.; Liu, Y.; Wu, K.; Tang, S.; Wei, H.; Chen, J. An efficiency optimization control method for three-phase interleaved dc-dc converter. In Proceedings of the 2021 3rd Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 26–29 March 2021; pp. 285–289. [Google Scholar] [CrossRef]
- Ebisumoto, D.; Kimura, S.; Nanamori, K.; Noah, M.; Ishihara, M.; Imaoka, J.; Yamamoto, M. Analytical investigation of interleaved DC-DC converter using closed-coupled inductor with phase drive control. In Proceedings of the 2017 IEEE International Telecommunications Energy Conference (INTELEC), Broadbeach, QLD, Australia, 22–26 October 2017; pp. 526–529. [Google Scholar] [CrossRef]
- Nandankar, P.; Rothe, J.P. Design and implementation of efficient three-phase interleaved DC-DC converter. In Proceedings of the International Conference & Workshop on Electronics & Telecommunication Engineering (ICWET 2016), Chennai, India, 3–5 March 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Zuber, D. MittelFrequente Resonante DC-DC Wandler Fur Traktions Anwendungen. Ph.D. Thesis, ETHZ, Zurich, Switzerland, 2001. [Google Scholar] [CrossRef]
- Jeong, J.U.; Lee, H.D.; Kim, C.S.; Choi, H.S.; Cho, B.H. A development of an energy storage system for hybrid electric vehicles using supercapacitor. In Proceedings of the The 19th International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exhibition, Busan, Korea, 19–23 October 2022; pp. 1379–1389. [Google Scholar]
- Inoue, S.; Akagi, H. A bidirectional DC–DC converter for an energy storage system with galvanic isolation. IEEE Trans. Power Electron. 2007, 22, 2299–2306. [Google Scholar] [CrossRef]
- Attaianese, C.; Nardi, V.; Tomasso, G. High performances supercapacitor recovery system for industrial drive applications. In Proceedings of the Nineteenth Annual IEEE Applied Power Electronics Conference and Exposition, APEC’04, Anaheim, CA, USA, 22–26 February 2004; Volume 3, pp. 1635–1641. [Google Scholar] [CrossRef]
- Grbovic, P.J.; Delarue, P.; Le Moigne, P.; Bartholomeus, P. Modeling and control of the ultracapacitor-based regenerative controlled electric drives. IEEE Trans. Ind. Electron. 2010, 58, 3471–3484. [Google Scholar] [CrossRef]
- Grbović, P.J.; Delarue, P.; Le Moigne, P.; Bartholomeus, P. The ultracapacitor-based controlled electric drives with braking and ride-through capability: Overview and analysis. IEEE Trans. Ind. Electron. 2010, 58, 925–936. [Google Scholar] [CrossRef]
- Timmermans, J.M.; Zadora, P.; Cheng, Y.; Van Mierlo, J.; Lataire, P. Modelling and design of super capacitors as peak power unit for hybrid electric vehicles. In Proceedings of the 2005 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 7 September 2005. [Google Scholar] [CrossRef]
- Polyakov, V.; Plotnikov, I.; Postniko, N. Single-Loop Control System for Energy Storage Device in the Frequency-Controlled Electric Drive. In Proceedings of the 2018 X International Conference on Electrical Power Drive Systems (ICEPDS), Novocherkassk, Russia, 3–6 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Thounthong, P.; Raël, S.; Davat, B. Control strategy of fuel cell and supercapacitors association for a distributed generation system. IEEE Trans. Ind. Electron. 2007, 54, 3225–3233. [Google Scholar] [CrossRef]
- Polyakov, V.; Plotnikov, I.; Postnikov, N. Comparative analysis of DC/DC converter control systems for variable-frequency drives with supercapacitors. In Proceedings of the 2019 International Ural Conference on Electrical Power Engineering (UralCon), Chelyabinsk, Russia, 1–3 October 2019; pp. 317–323. [Google Scholar] [CrossRef]
- Kloetzl, J.; Gerling, D. An interleaved buck-boost-converter combined with a supercapacitor-storage for the stabilization of automotive power nets. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Iannuzzi, D.; Lauria, D. A new supercapacitor design methodology for light transportation systems saving. In Energy Management Systems; IntechOpen: Rijeka, Croatia, 2011; pp. 183–198. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Yin, C.; Jiang, Y.; Pan, S. A realtime apf method for battery ripple current reduction in hess-based electric vehicles. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Russo, A.; Cavallo, A. Supercapacitor stability and control for More Electric Aircraft application. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; pp. 1909–1914. [Google Scholar] [CrossRef]
- Lhomme, W.; Delarue, P.; Barrade, P.; Bouscayrol, A.; Rufer, A. Design and control of a supercapacitor storage system for traction applications. In Proceedings of the Fourtieth IAS Annual Meeting. Conference Record of the 2005 Industry Applications Conference, Hong Kong, China, 2–6 October; 2005; Volume 3, pp. 2013–2020. [Google Scholar] [CrossRef]
- Wang, L.; Li, H. Maximum fuel economy-oriented power management design for a fuel cell vehicle using battery and ultracapacitor. IEEE Trans. Ind. Appl. 2010, 46, 1011–1020. [Google Scholar] [CrossRef]
- Arnet, B.J.; Haines, L.P. High power DC-to-DC converter for supercapacitors. In Proceedings of the IEMDC 2001. IEEE International Electric Machines and Drives Conference (Cat. No. 01EX485), Cambridge, MA, USA, 17–20 June 2001; pp. 985–990. [Google Scholar] [CrossRef]
- Schreiner, R.T. Systems of Subordinate Regulation of Electric Drives: Textbook; Publishing house of GOU VPO Ros. state prof.-ped. un: Yekaterinburg, Ruassia, 2008; p. 279. [Google Scholar]




















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vladimir, P.; Iurii, P. Supercapacitor Energy Storages in Hybrid Power Supplies for Frequency-Controlled Electric Drives: Review of Topologies and Automatic Control Systems. Energies 2023, 16, 3287. https://doi.org/10.3390/en16073287
Vladimir P, Iurii P. Supercapacitor Energy Storages in Hybrid Power Supplies for Frequency-Controlled Electric Drives: Review of Topologies and Automatic Control Systems. Energies. 2023; 16(7):3287. https://doi.org/10.3390/en16073287
Chicago/Turabian StyleVladimir, Polyakov, and Plotnikov Iurii. 2023. "Supercapacitor Energy Storages in Hybrid Power Supplies for Frequency-Controlled Electric Drives: Review of Topologies and Automatic Control Systems" Energies 16, no. 7: 3287. https://doi.org/10.3390/en16073287
APA StyleVladimir, P., & Iurii, P. (2023). Supercapacitor Energy Storages in Hybrid Power Supplies for Frequency-Controlled Electric Drives: Review of Topologies and Automatic Control Systems. Energies, 16(7), 3287. https://doi.org/10.3390/en16073287