
An Improved Q-Axis Current Control to Mitigate the Low-Frequency Oscillation in a Single-Phase Grid-Connected Converter System
Abstract
:1. Introduction
2. Proposed Control Scheme
2.1. System Configuration
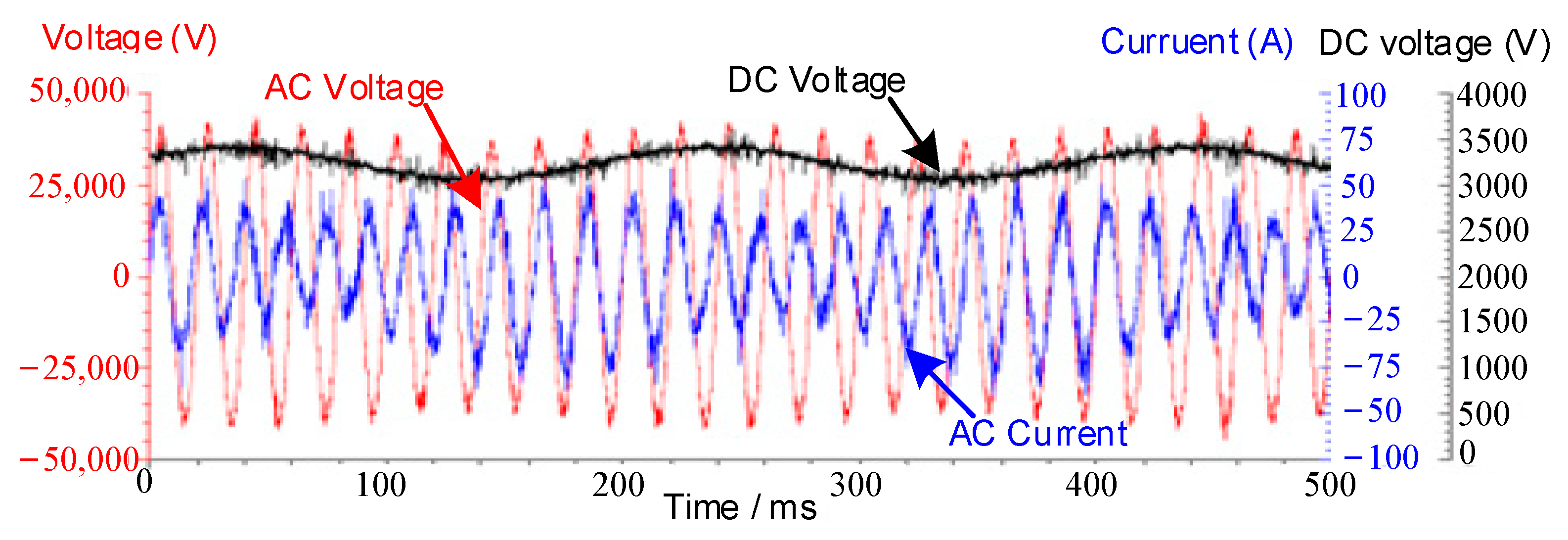
2.2. Field-Measured LFO Waveform
2.3. Improved Q-Axis Current Control
3. Impedance Modeling and Stability Analysis
3.1. Impedance Modeling of the Train in the dq Frame
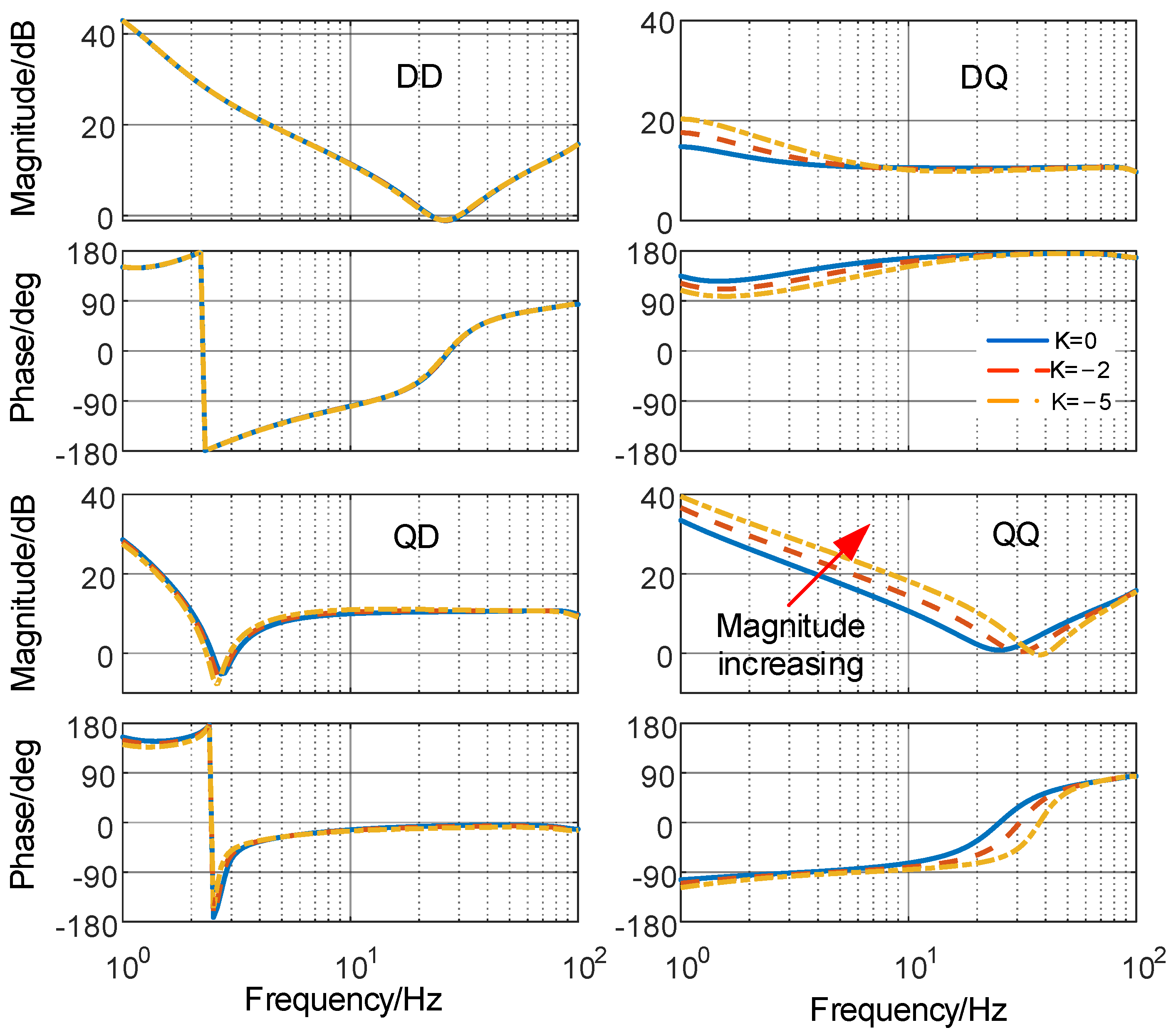
3.2. Impact of the Proposed Control Scheme on the Impedance
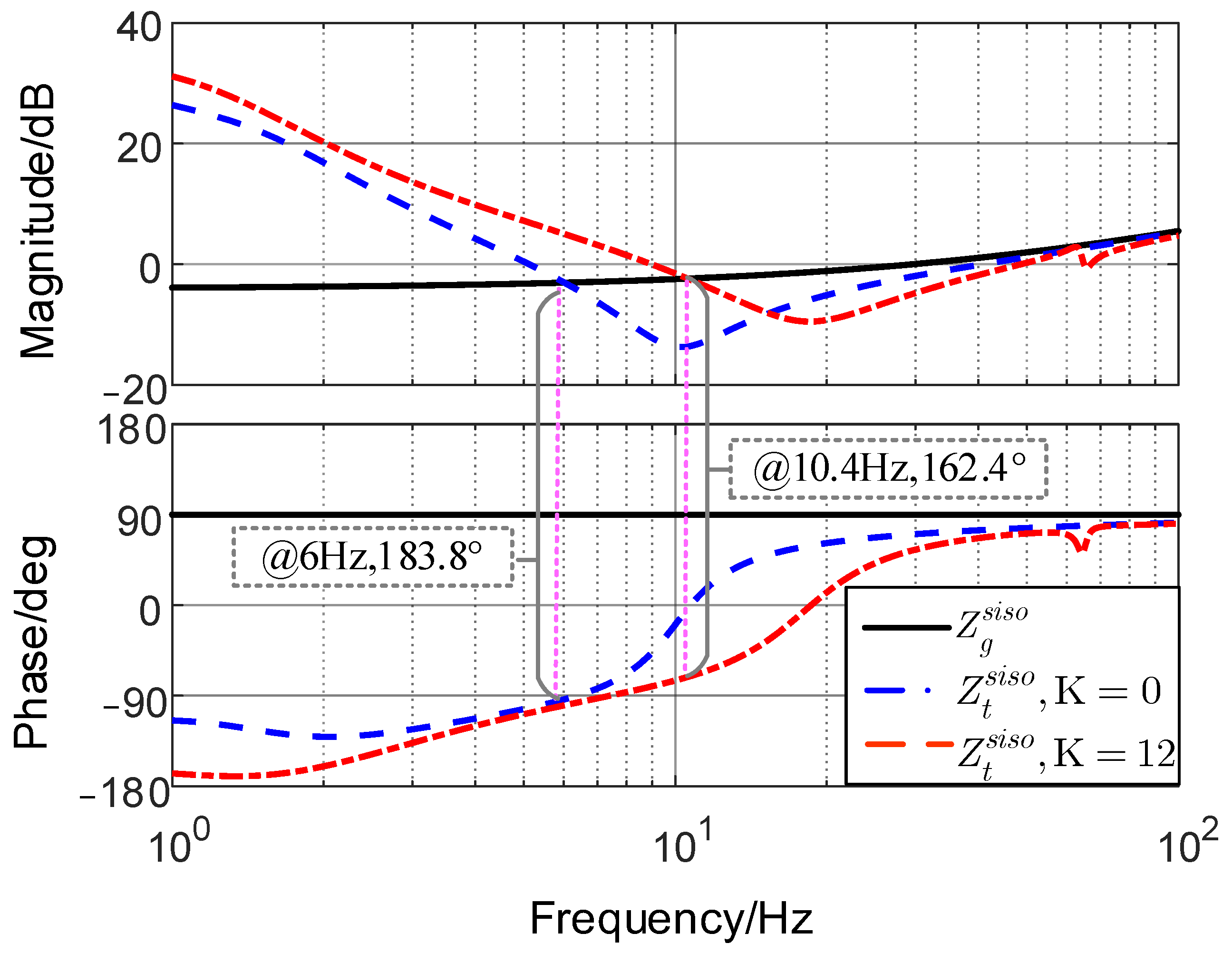
3.3. Design of the Gain Coefficient Based on SISO Equivalent Model
3.3.1. SISO Equivalent Model of the Train–Network System
3.3.2. Design Principle of the Gain Coefficient
3.4. Stability Improvement
3.5. Impact of the Proposed Method on the Dynamic Performance
4. Verification
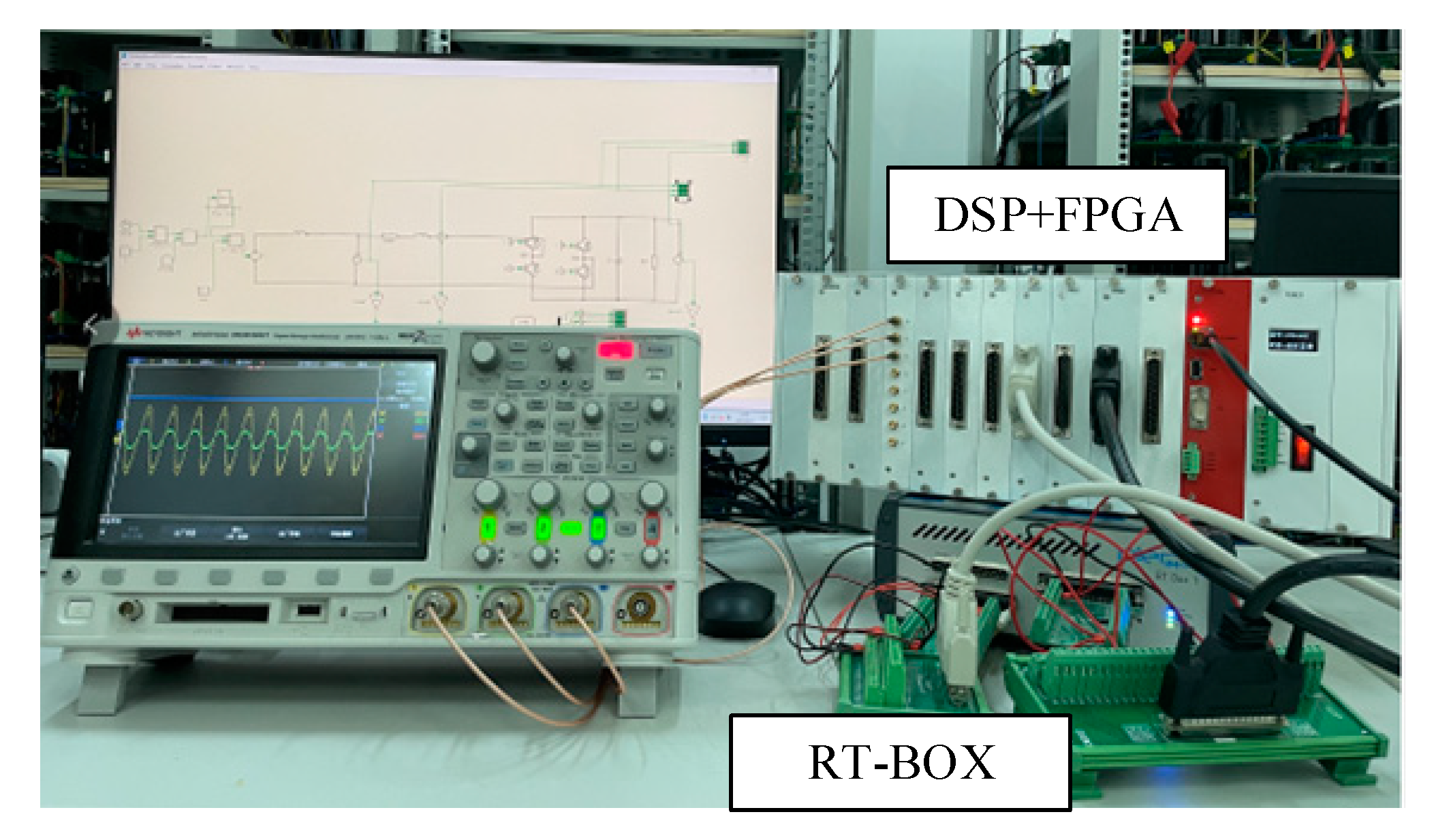
4.1. Experimental Setup
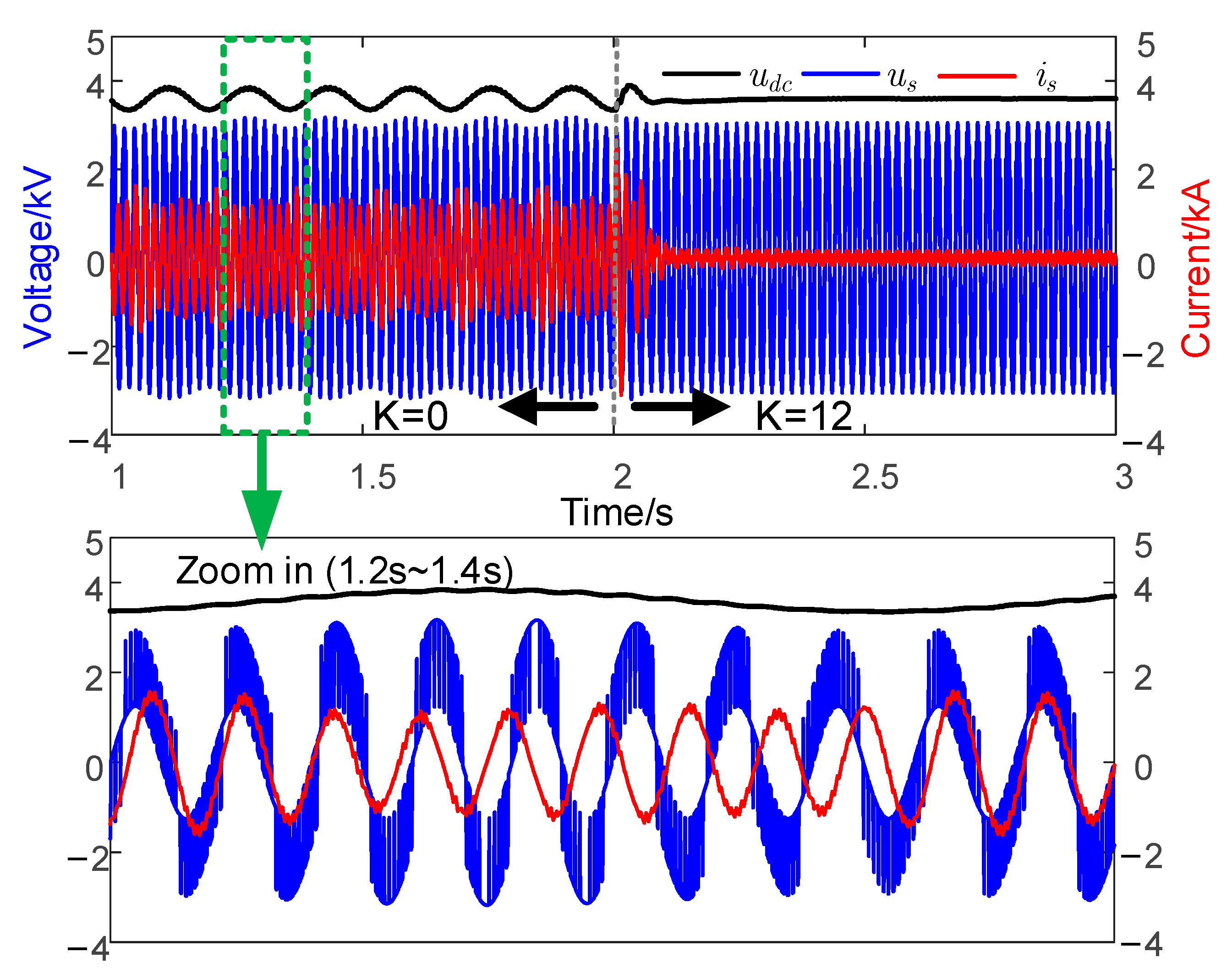
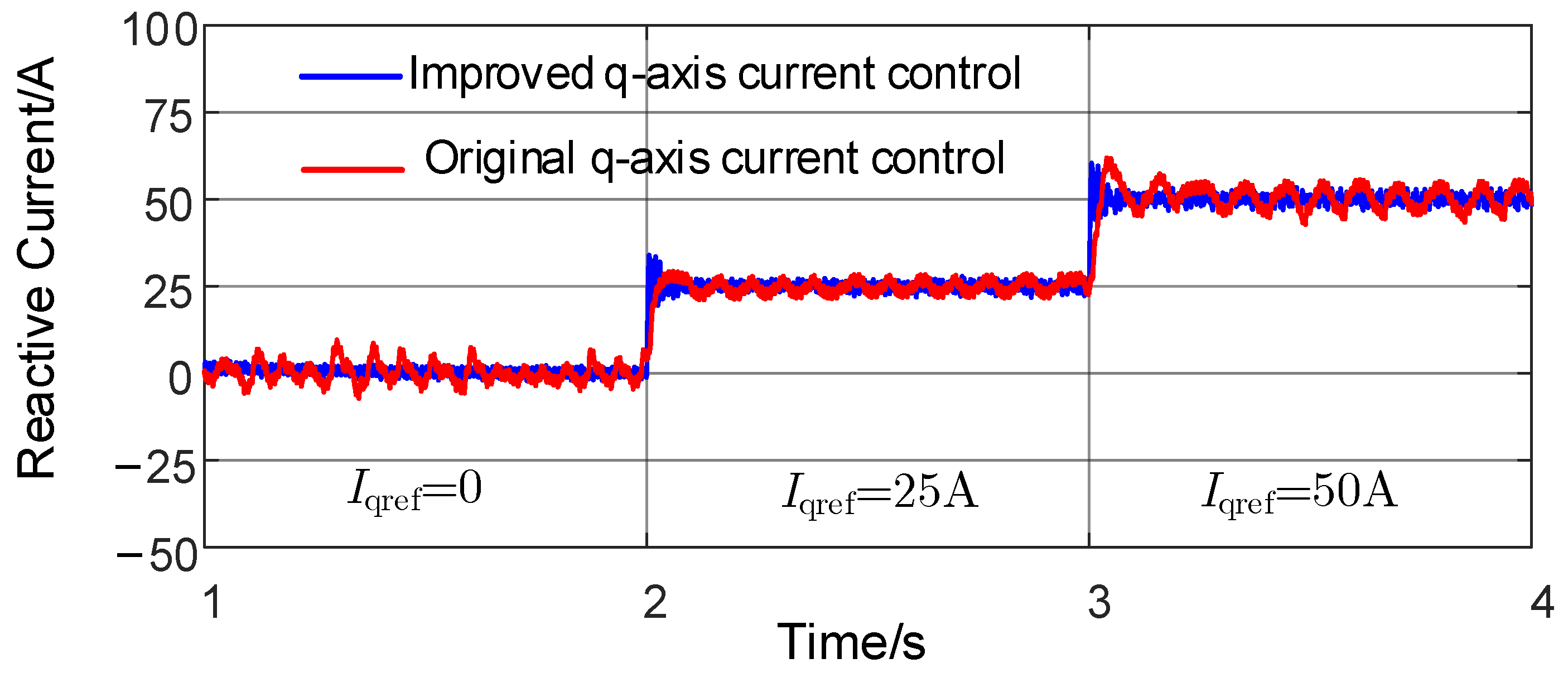
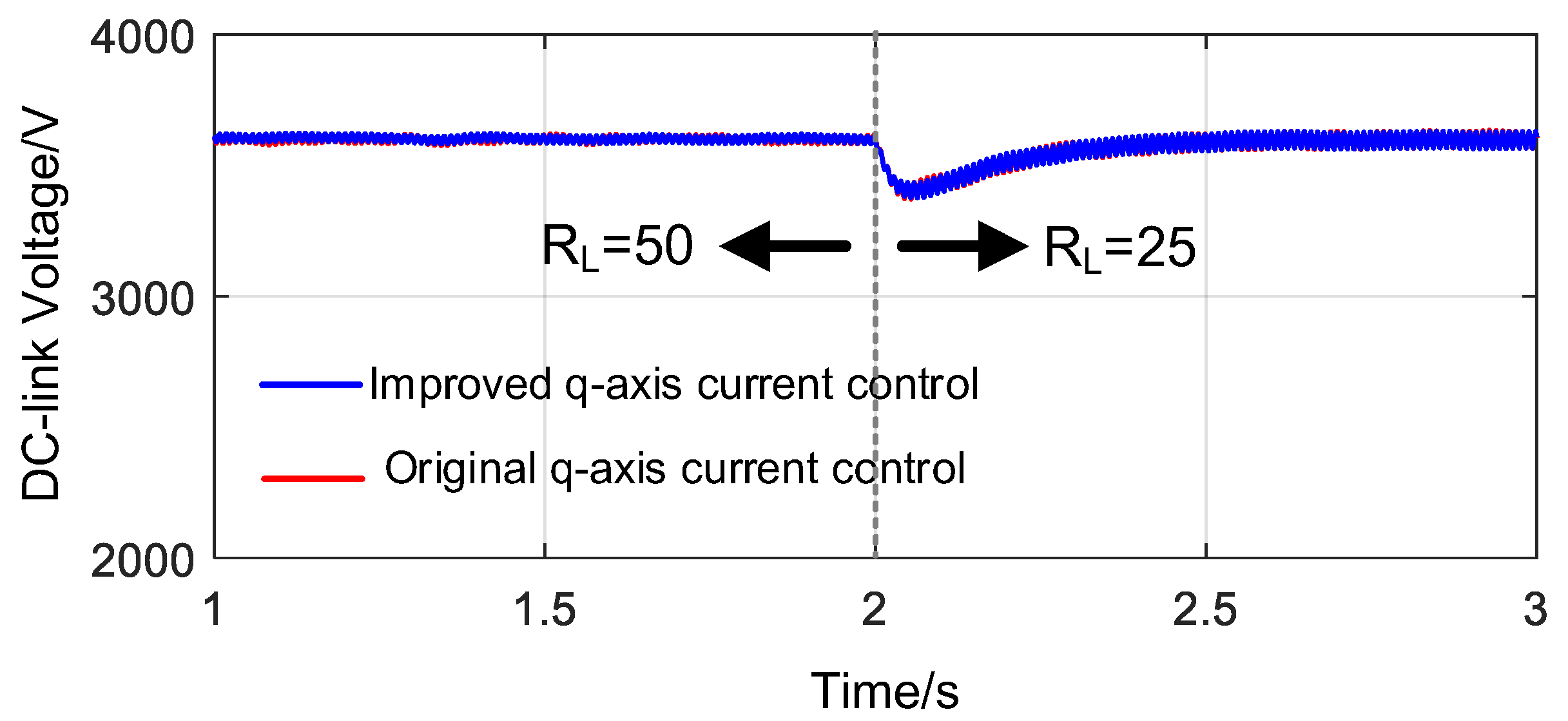
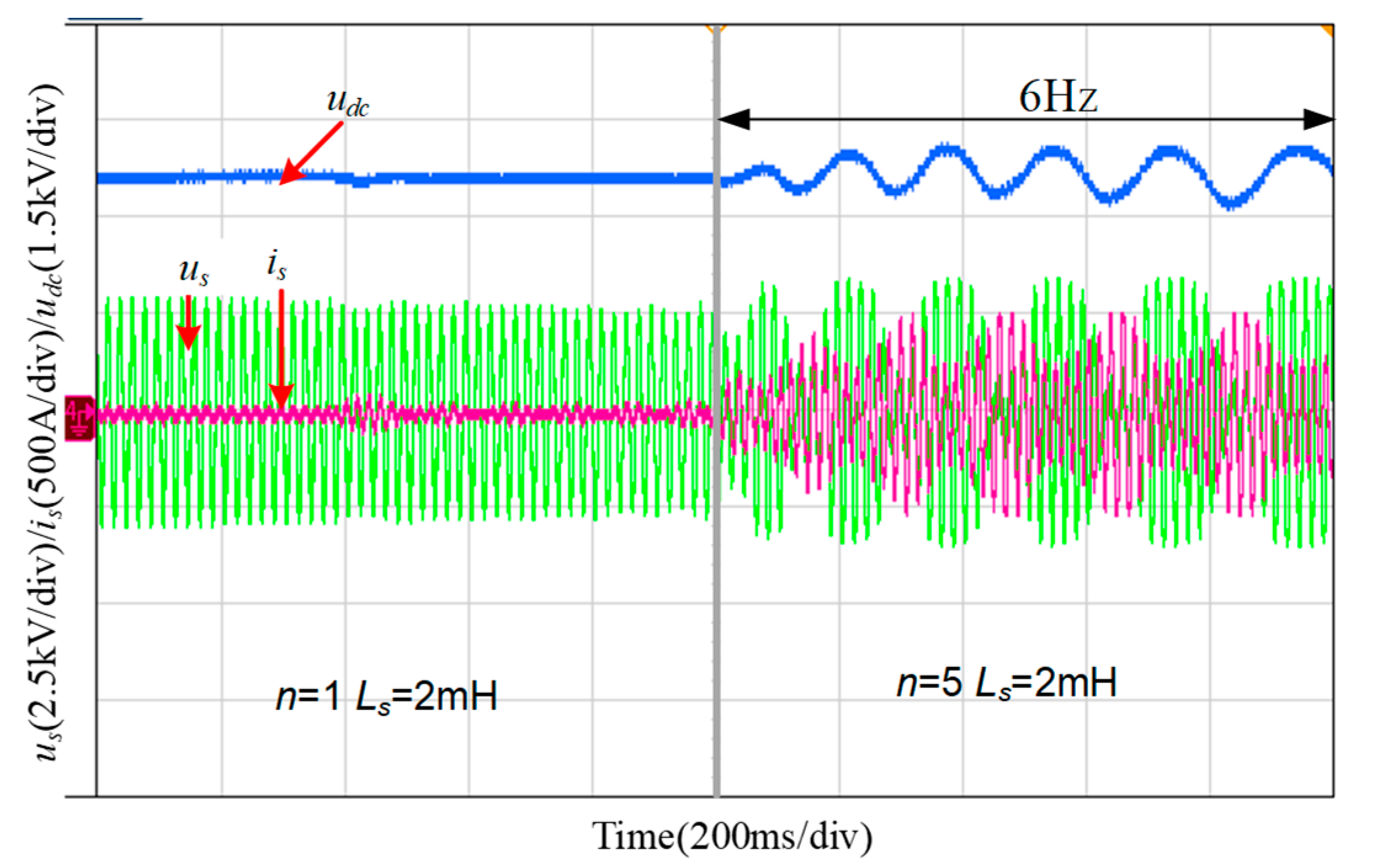
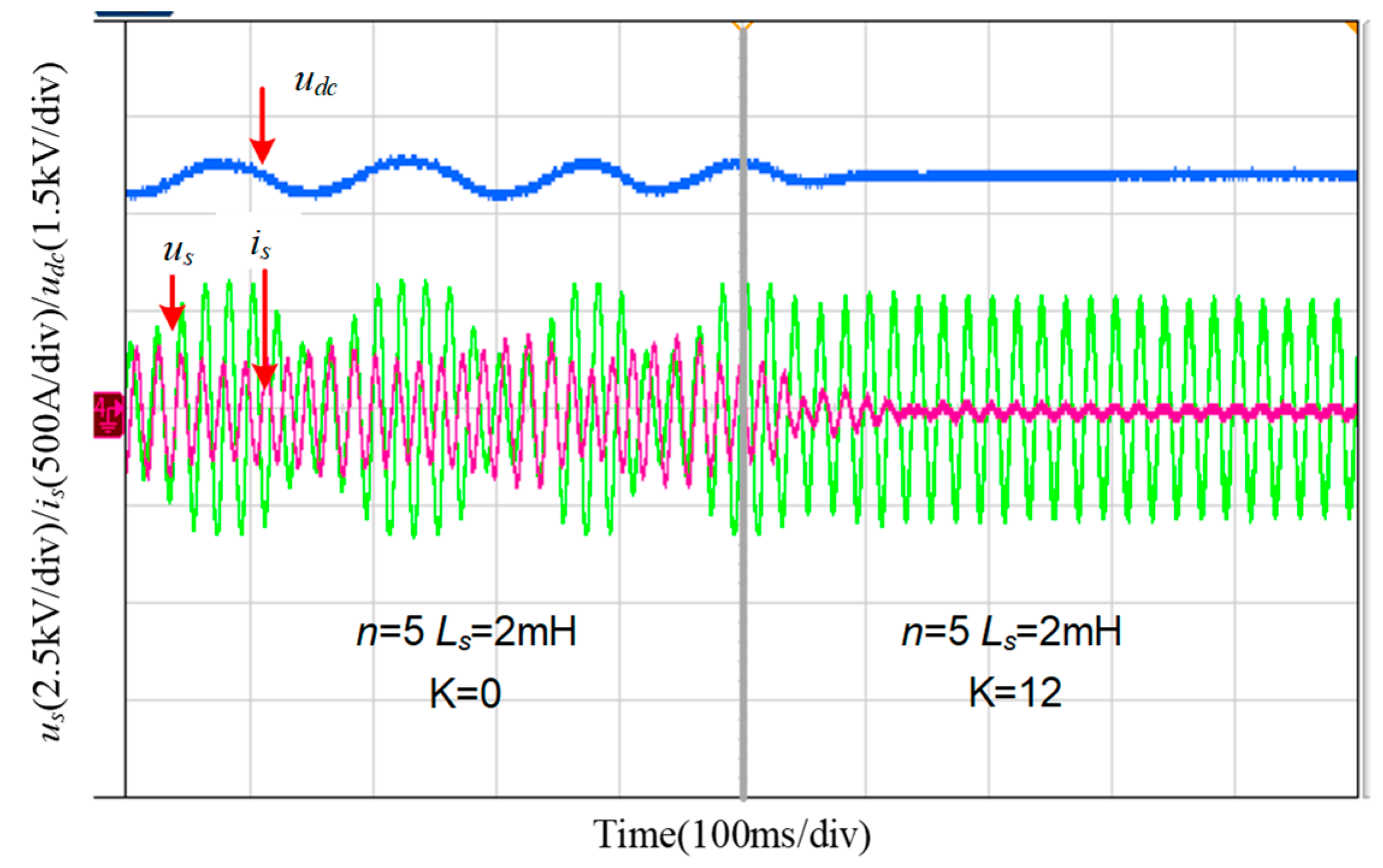
4.2. Experimental Results
5. Conclusions
- (1)
- The proposed q-axis current control increases the magnitude of the input impedance of the train. A higher gain coefficient K in the proposed method can provide a higher impedance magnitude. Based on the impedance ratio criterion, the improved q-axis current control reduces the modulus of the ratio between the impedance of the traction network and the impedance of the train, which is beneficial for the small-signal stability of the train–network system.
- (2)
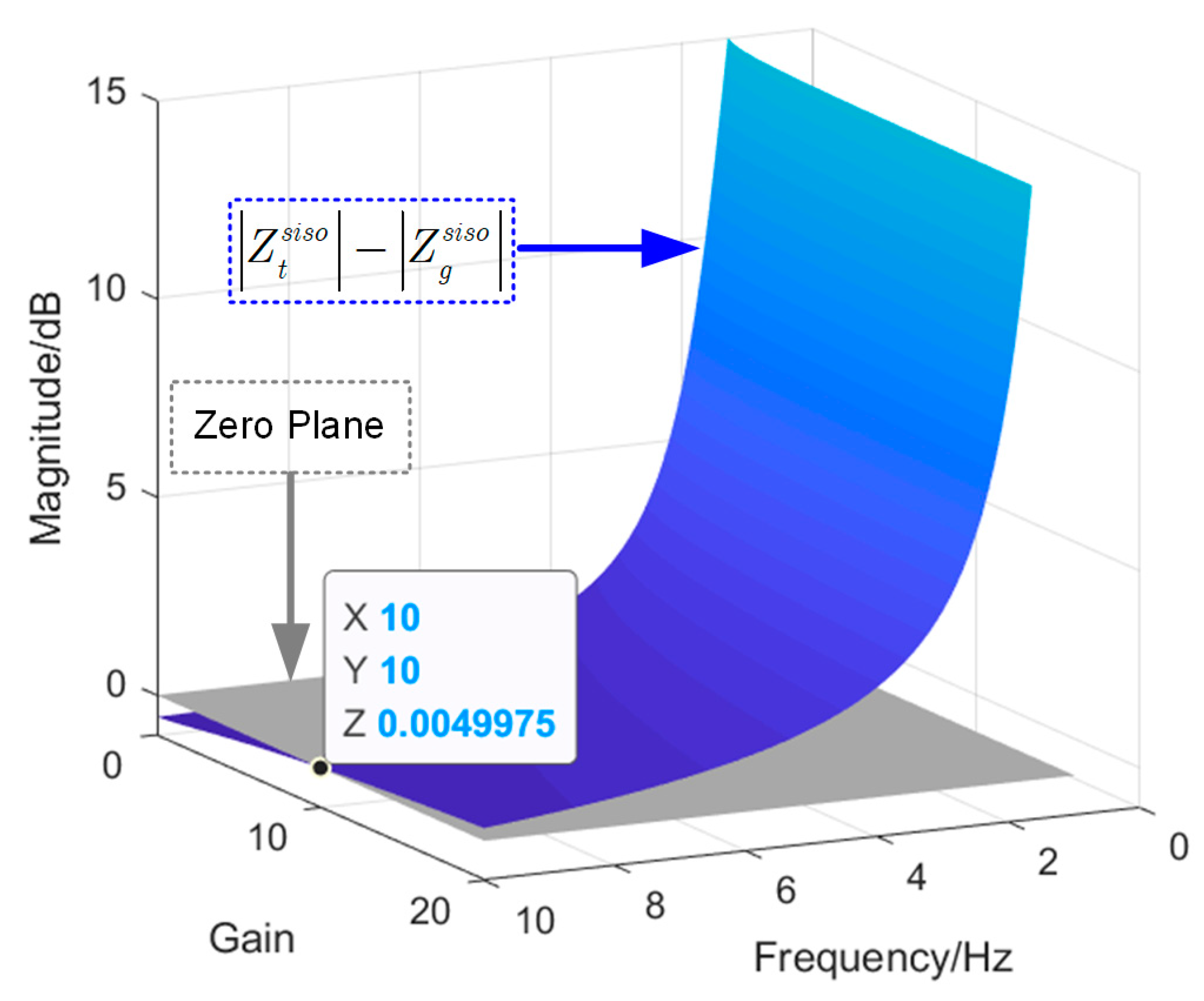
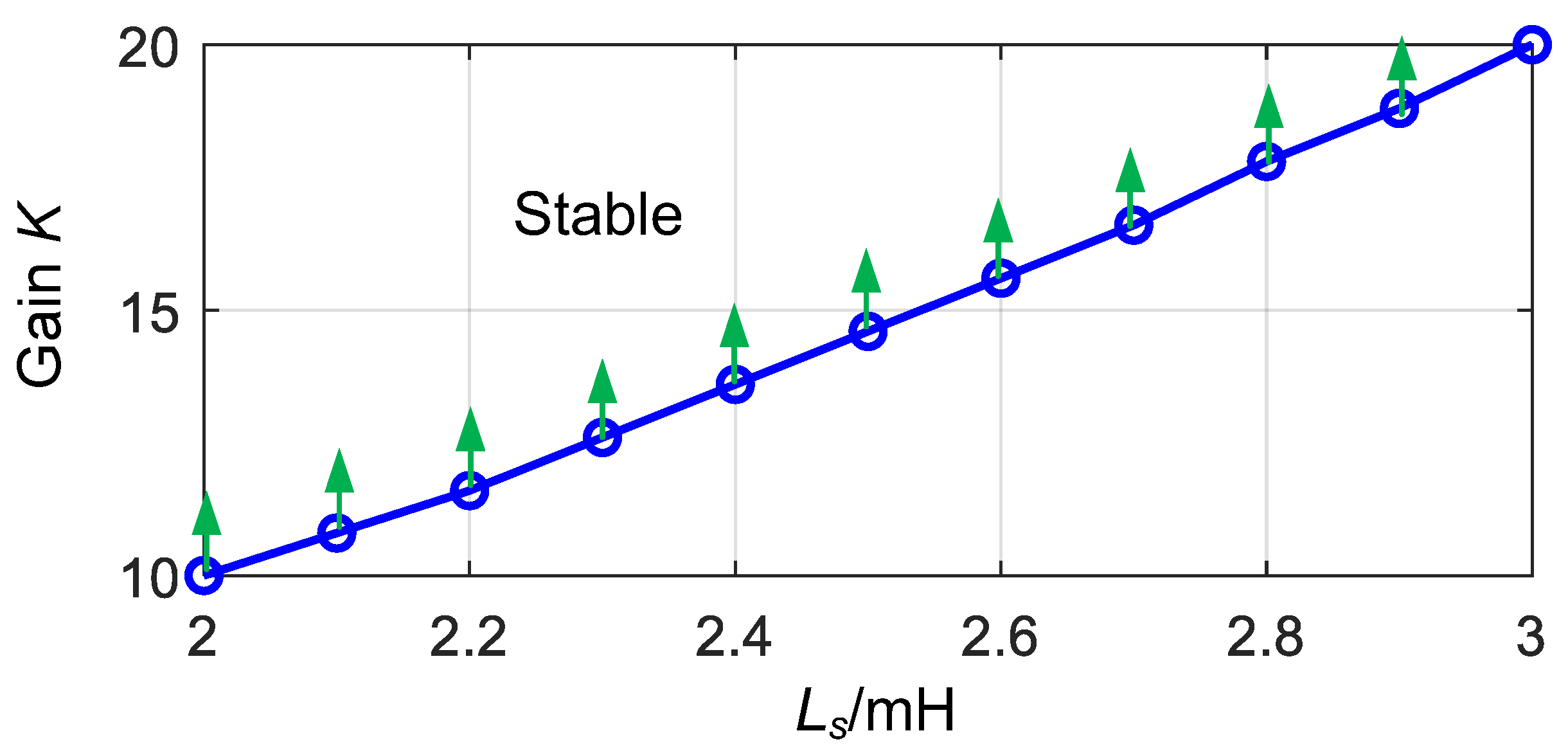
- A design approach for quantizing the gain coefficient K is proposed based on the SISO equivalent impedance model. The fundamental design principle is that the minimum value of K should ensure that there is no intersection of impedance magnitude between the traction network and the train in the negative resistor range.
- (3)
- The improved q-axis current control has no effects on the dynamic performance of the DC-link voltage under the normal operation mode.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, H.; Tao, H.; Blaabjerg, F.; Wang, X.; He, Z.; Gao, S. Train–Network Interactions and Stability Evaluation in High-Speed Railways–Part I: Phenomena and Modeling. IEEE Trans. Power Electron. 2017, 33, 4627–4642. [Google Scholar] [CrossRef]
- Hu, H.; Shao, Y.; Tang, L.; Ma, J.; He, Z.; Gao, S. Overview of Harmonic and Resonance in Railway Electrification Systems. IEEE Trans. Ind. Appl. 2018, 54, 5227–5245. [Google Scholar] [CrossRef]
- Tao, H.; Hu, H.; Wang, X.; Blaabjerg, F.; He, Z. Impedance-Based Harmonic Instability Assessment in a Multiple Electric Trains and Traction Network Interaction System. IEEE Trans. Ind. Appl. 2018, 54, 5083–5096. [Google Scholar] [CrossRef]
- Wang, H.; Mingli, W.; Sun, J. Analysis of Low-Frequency Oscillation in Electric Railways Based on Small-Signal Modeling of Vehicle-Grid System in dq Frame. IEEE Trans. Power Electron. 2015, 30, 5318–5330. [Google Scholar] [CrossRef]
- Liao, Y.; Liu, Z.; Zhang, H.; Wen, B. Low-Frequency Stability Analysis of Single-Phase System with dq-Frame Impedance Approach—Part I: Impedance Modeling and Verification. IEEE Trans. Ind. Appl. 2018, 54, 4999–5011. [Google Scholar] [CrossRef]
- Jiang, X.; Hu, H.; He, Z.; Tao, H.; Qian, Q. Study on low-frequency voltage fluctuation of traction power supply system introduced by multiple modern trains. Electr. Power Syst. Res. 2017, 146, 246–257. [Google Scholar] [CrossRef]
- Jiang, K.; Zhang, C.; Ge, X. Low-Frequency Oscillation Analysis of the Train-Grid System Based on an Improved Forbidden-Region Criterion. IEEE Trans. Ind. Appl. 2018, 54, 5064–5073. [Google Scholar] [CrossRef]
- Liao, Y.; Liu, Z.; Zhang, H.; Wen, B. Low-Frequency Stability Analysis of Single-Phase System With dq-Frame Impedance Approach—Part II: Stability and Frequency Analysis. IEEE Trans. Ind. Appl. 2018, 54, 5012–5024. [Google Scholar] [CrossRef]
- Zhou, Y.; Hu, H.; Yang, X.; Yang, J.; He, Z.; Gao, S. Low Frequency Oscillation Traceability and Suppression in Railway Electrification Systems. IEEE Trans. Ind. Appl. 2019, 55, 7699–7711. [Google Scholar] [CrossRef]
- Hu, H.; Zhou, Y.; Li, X.; Lei, K. Low-Frequency Oscillation in Electric Railway Depot: A Comprehensive Review. IEEE Trans. Power Electron. 2020, 36, 295–314. [Google Scholar] [CrossRef]
- Wu, S.; Liu, Z.; Li, Z.; Zhang, H.; Hu, X. Impedance Modeling and Stability Analysis in Vehicle-Grid System with CHB-STATCOM. IEEE Trans. Power Syst. 2020, 35, 3026–3039. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, Z.; Yao, S.; Liao, Y.; Xiang, C. Suppression of Low-Frequency Oscillation in Traction Network of High-Speed Railway Based on Auto-Disturbance Rejection Control. IEEE Trans. Transp. Electrif. 2016, 2, 244–255. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Liu, S.; Li, Z.; Zhang, H.; Zhang, Z. An Approach to Suppress Low-Frequency Oscillation by Combining Extended State Observer With Model Predictive Control of EMUs Rectifier. IEEE Trans. Power Electron. 2019, 34, 10282–10297. [Google Scholar] [CrossRef]
- Liu, Z.; Geng, Z.; Hu, X. An Approach to Suppress Low Frequency Oscillation in the Traction Network of High-Speed Railway Using Passivity-Based Control. IEEE Trans. Power Syst. 2018, 33, 3909–3918. [Google Scholar] [CrossRef]
- Jiang, X.; Hu, H.; Yang, X.; He, Z.; Qian, Q.; Tricoli, P. Analysis and Adaptive Mitigation Scheme of Low-Frequency Oscillations in AC Railway Traction Power Systems. IEEE Trans. Transp. Electrif. 2019, 5, 715–726. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.W.; Blaabjerg, F.; Loh, P.C. Virtual-Impedance-Based Control for Voltage-Source and Current-Source Converters. IEEE Trans. Power Electron. 2014, 30, 7019–7037. [Google Scholar] [CrossRef]
- Shuai, Z.; Cheng, H.; Xu, J.; Shen, C.; Hong, Y.; Li, Y. A Notch Filter-Based Active Damping Control Method for Low-Frequency Oscillation Suppression in Train–Network Interaction Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2417–2427. [Google Scholar] [CrossRef]
- Danielsen, S. Electric Traction Power System Stability. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2010. [Google Scholar]
- Li, J.; Wu, M. Measurement and Analysis on Low-Frequency Oscillation in Xuzhou Electrical Railway Hub. In Proceedings of the 2015 International Conference on Electrical and Information Technologies for Rail Transportation, Zhuzhou, China, 17–19 October 2015; pp. 659–666. [Google Scholar]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of D-Q Small-Signal Impedance of Grid-Tied Inverters. IEEE Trans. Power Electron. 2015, 31, 675–687. [Google Scholar] [CrossRef]
- Harnefors, L. Modeling of Three-Phase Dynamic Systems Using Complex Transfer Functions and Transfer Matrices. IEEE Trans. Ind. Electron. 2007, 54, 2239–2248. [Google Scholar] [CrossRef]
- Zhang, C.; Cai, X.; Rygg, A.; Molinas, M. Sequence Domain SISO Equivalent Models of a Grid-Tied Voltage Source Converter System for Small-Signal Stability Analysis. IEEE Trans. Energy Convers. 2017, 33, 741–749. [Google Scholar] [CrossRef]
- Rygg, A.; Molinas, M.; Zhang, C.; Cai, X. A Modified Sequence-Domain Impedance Definition and Its Equivalence to the dq-Domain Impedance Definition for the Stability Analysis of AC Power Electronic Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1383–1396. [Google Scholar] [CrossRef]
- Liao, K.; Pang, B.; Yang, J.; He, Z. Compensation Strategy of Wideband Voltage Harmonics for Doubly-Fed Induction Generator. IEEE Trans. Energy Convers. 2022, 38, 674–684. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| AC voltage of the 4 QC | us | 1770 V |
| AC current of the 4 QC | is | 7.32 A |
| Steady-state DC voltage | 3600 V | |
| Steady-state d-axis voltage | 2503 V | |
| Steady-state d-axis current | 10.4 A | |
| Steady-state q-axis current | 0 A | |
| Fundamental frequency | f0 | 50 Hz |
| Fundamental angle frequency | ω0 | 314 rad/s |
| Load resistor of the 4 QC | RL | 1000 Ω |
| Input inductor of the 4 QC | L | 10 mH |
| DC-link capacitor of the 4 QC | Cd | 9 mF |
| SOGI parameters | Ku, Ki | Ku = 0.8, Ki = 0.8 |
| PLL control parameters | Kppll, Kipll | Kppll = 0.012, Kipll = 0.09 |
| CC control parameters | Kpc, Kic | Kpc = 2, Kic = 6 |
| DVC control parameters | Kpv, Kiv | Kpv = 0.6, Kiv = 5 |
| Switch frequency | fsw | 500 Hz |
| Inductance of the network | LS | 2 mH |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, K.; Zhao, C.; Zhou, Y. An Improved Q-Axis Current Control to Mitigate the Low-Frequency Oscillation in a Single-Phase Grid-Connected Converter System. Energies 2023, 16, 3816. https://doi.org/10.3390/en16093816
Wei K, Zhao C, Zhou Y. An Improved Q-Axis Current Control to Mitigate the Low-Frequency Oscillation in a Single-Phase Grid-Connected Converter System. Energies. 2023; 16(9):3816. https://doi.org/10.3390/en16093816
Chicago/Turabian StyleWei, Kai, Changjun Zhao, and Yi Zhou. 2023. "An Improved Q-Axis Current Control to Mitigate the Low-Frequency Oscillation in a Single-Phase Grid-Connected Converter System" Energies 16, no. 9: 3816. https://doi.org/10.3390/en16093816