
Yaw Optimisation for Wind Farm Production Maximisation Based on a Dynamic Wake Model

Abstract
:1. Introduction
2. Model Description
2.1. Wind Turbine Power
2.2. Single-Wake Model
2.3. Initial Conditions
2.4. Modifications of Single-Wake Model
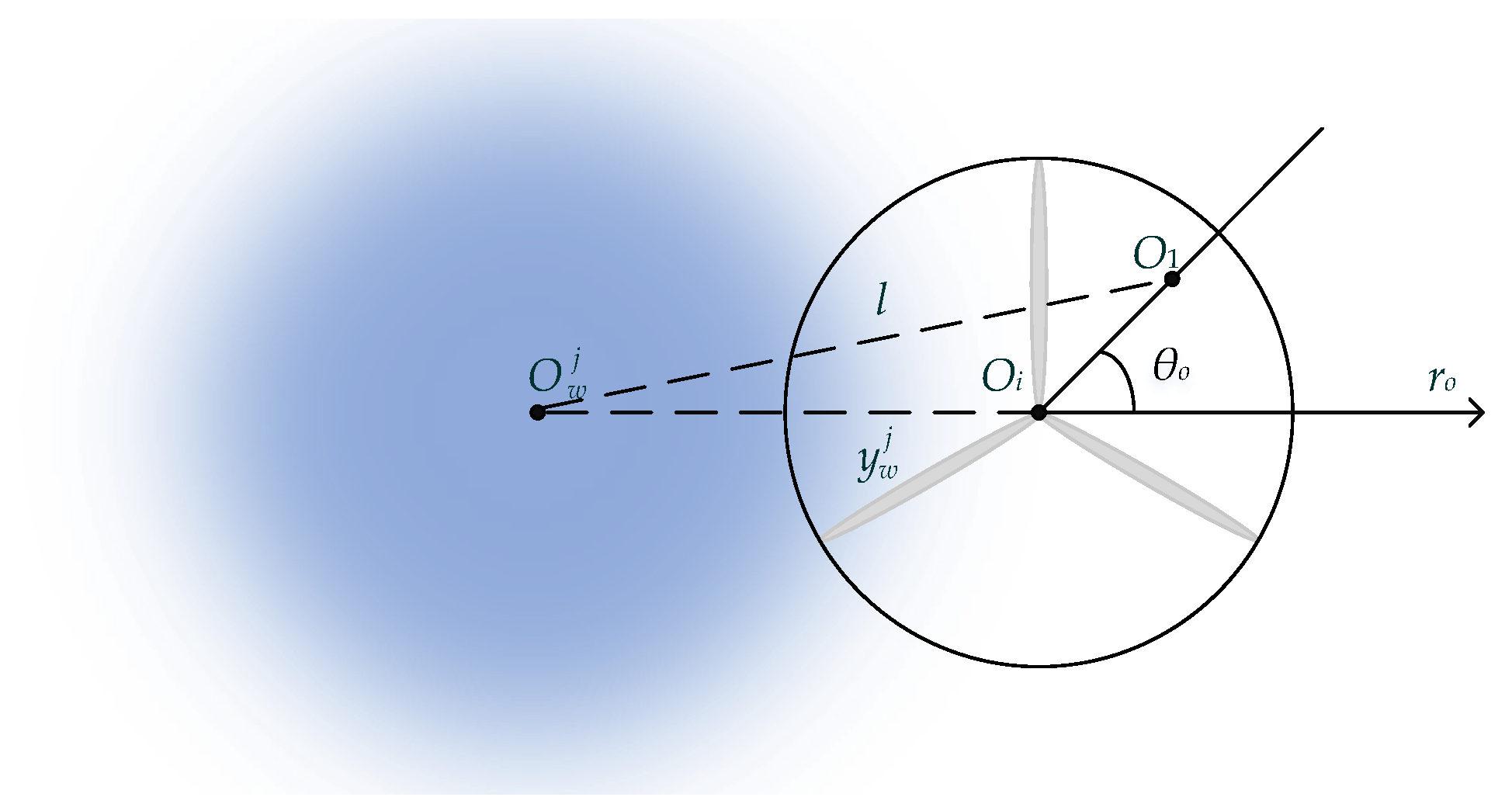
2.5. Wake Interaction
3. Model Validation
3.1. Comparison of Static Wake Distributions
3.2. Validation of Dynamic Wake
4. Wind Farm Production Maximisation Based on Dynamic Yawed Wake Calculation
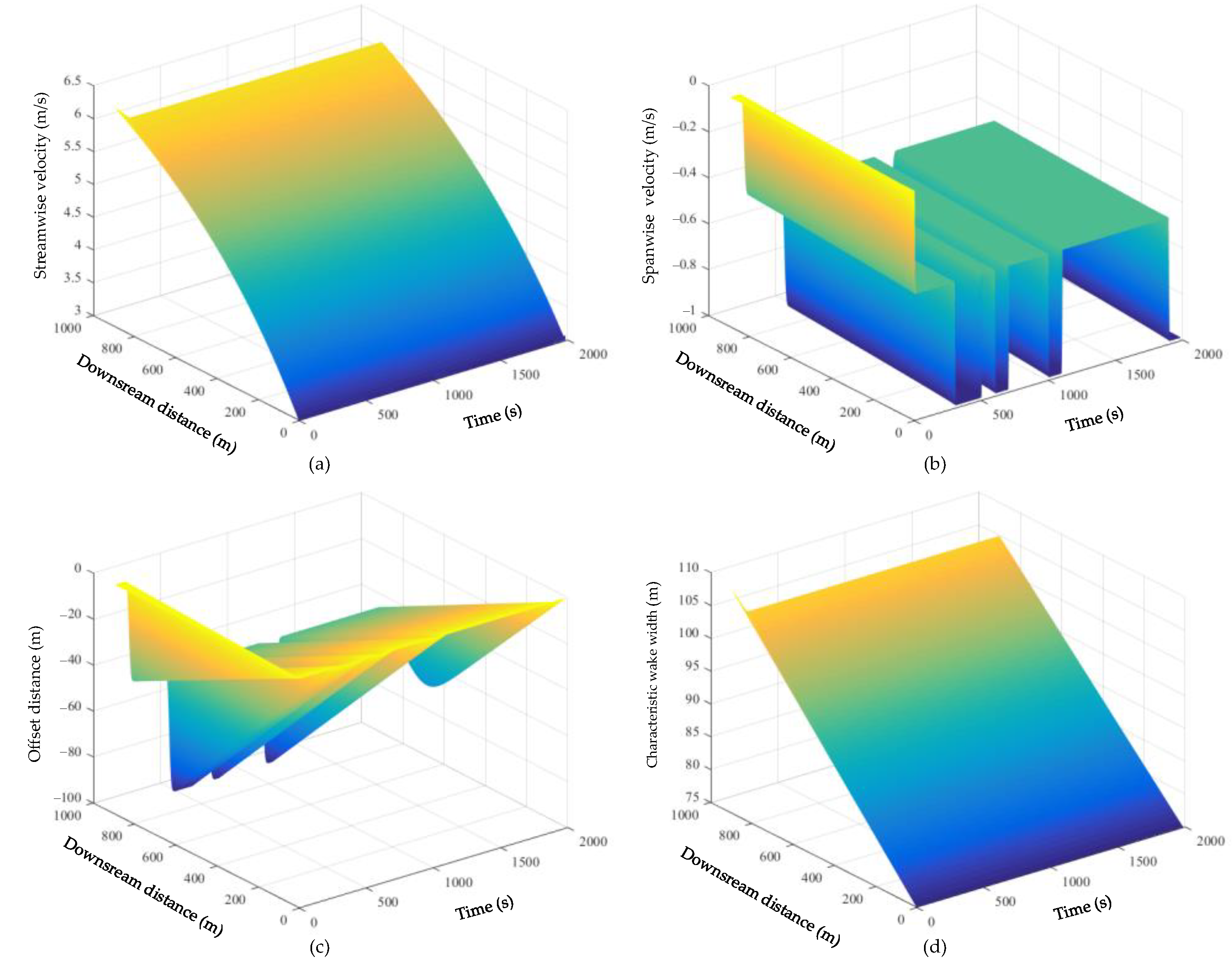
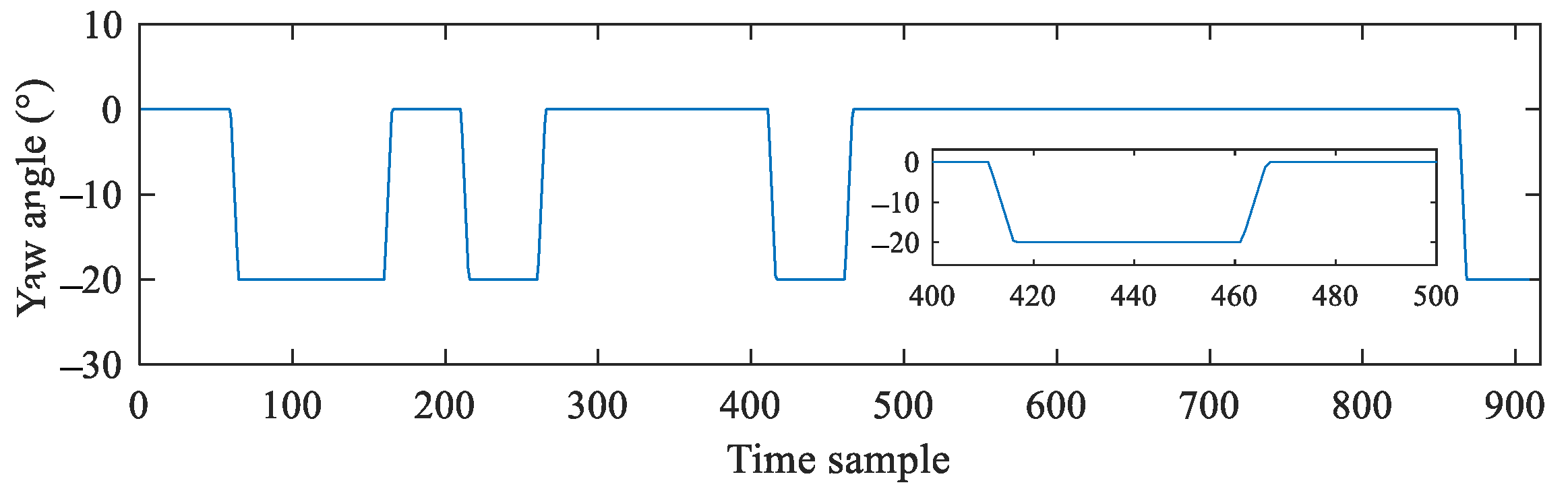
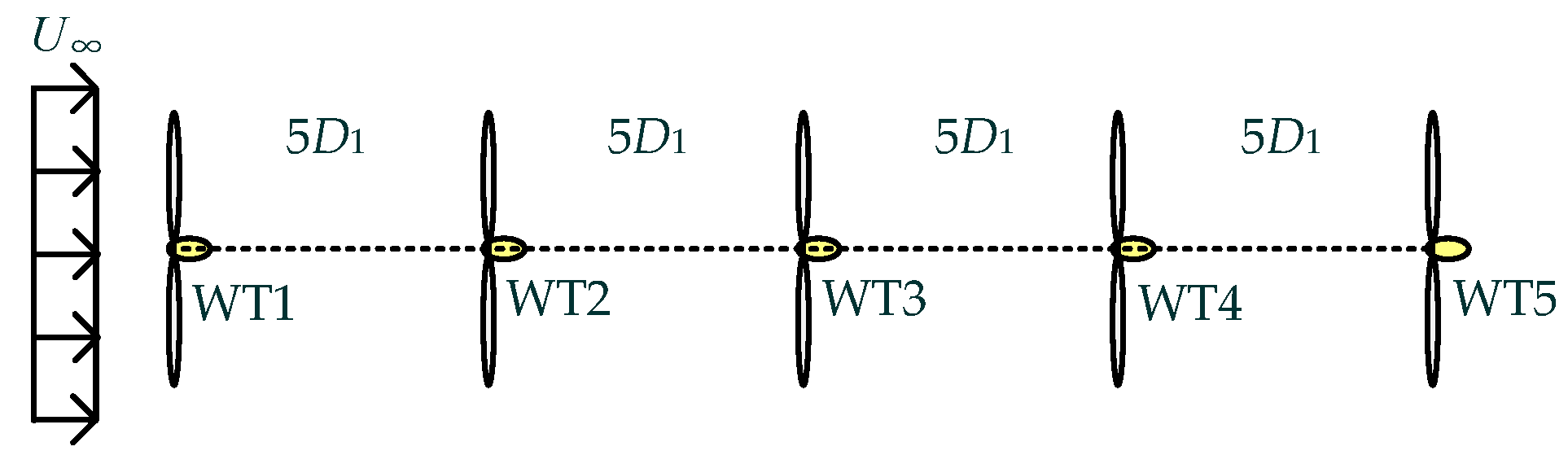
4.1. Wake Propagation
4.2. Wind Farm Production Maximisation Based on Dynamic Wake Model
4.2.1. Problem Statement
4.2.2. Optimisation Results
5. Conclusions
- A simplified dynamic wake model for wind farm prediction is derived according to the momentum conservation theory and backward difference method. The spanwise velocity deficit of the wake is based on super-Gaussian distribution. The wake superposition is conducted by the rotor-based root sum square method.
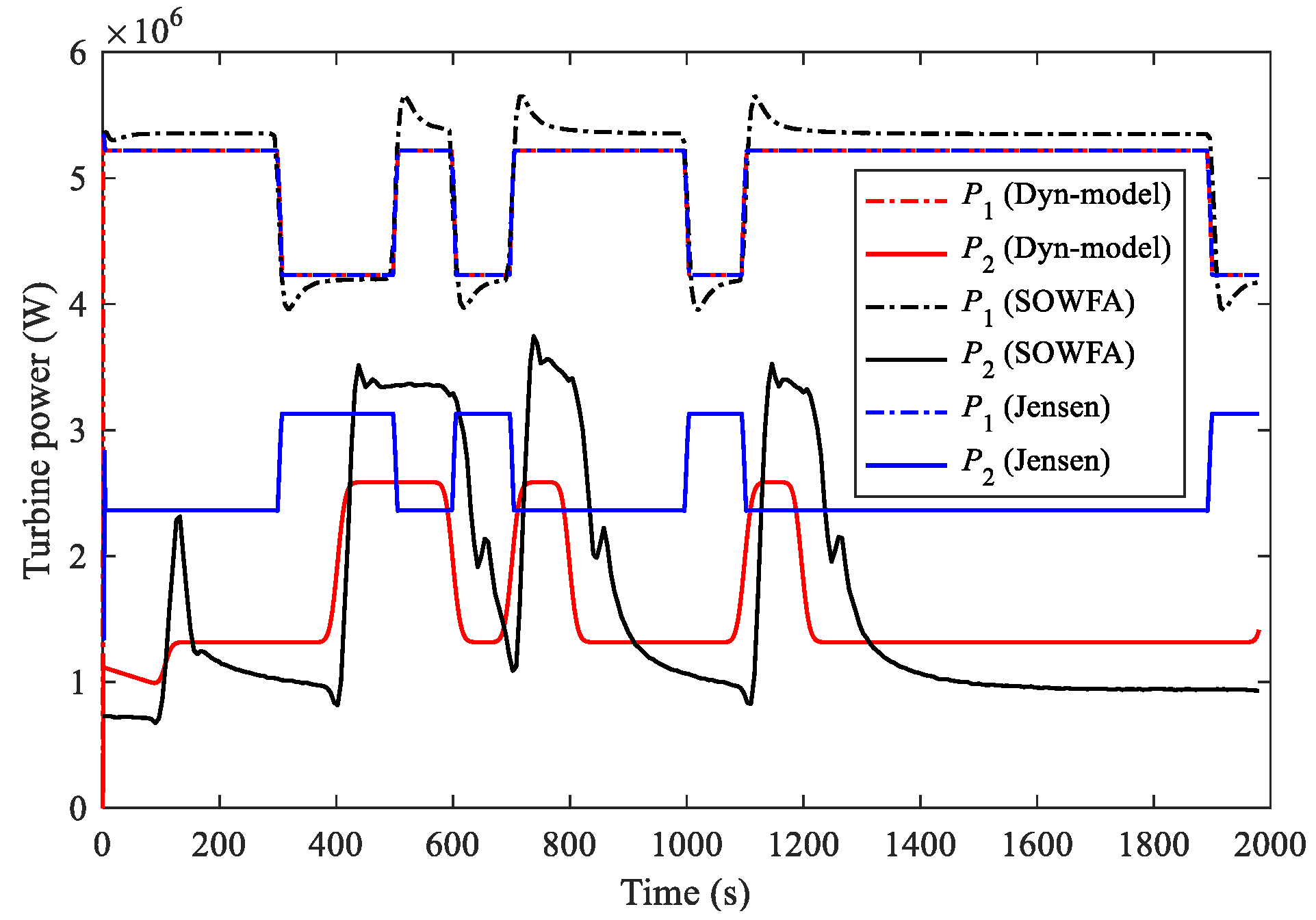
- The static distribution of the proposed model is validated with the Jensen model and a Gaussian-based static model. The time-varying process of the proposed model agrees well with numerical results from SOWFA.
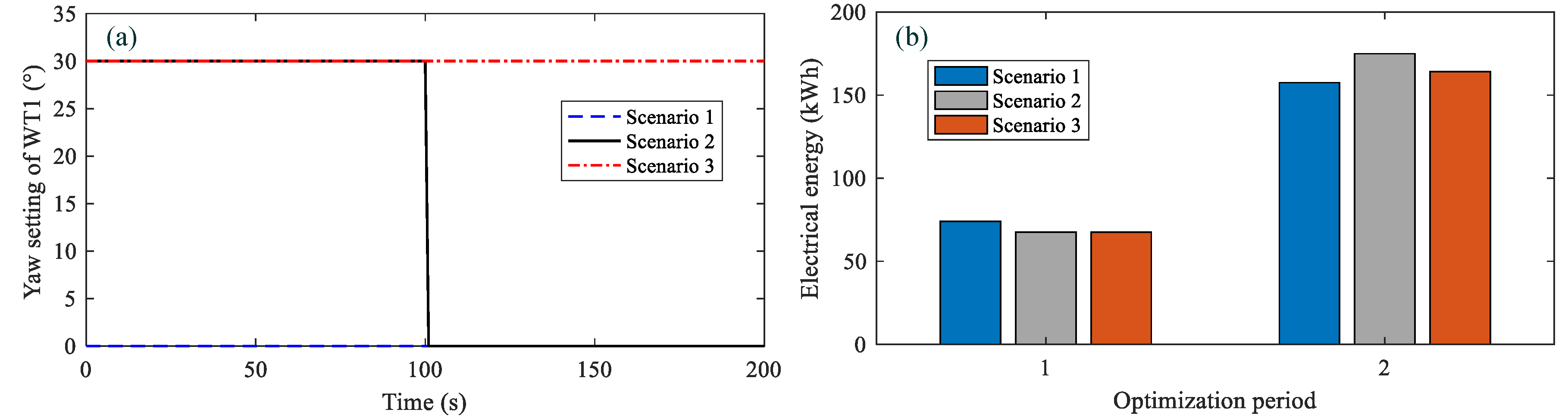
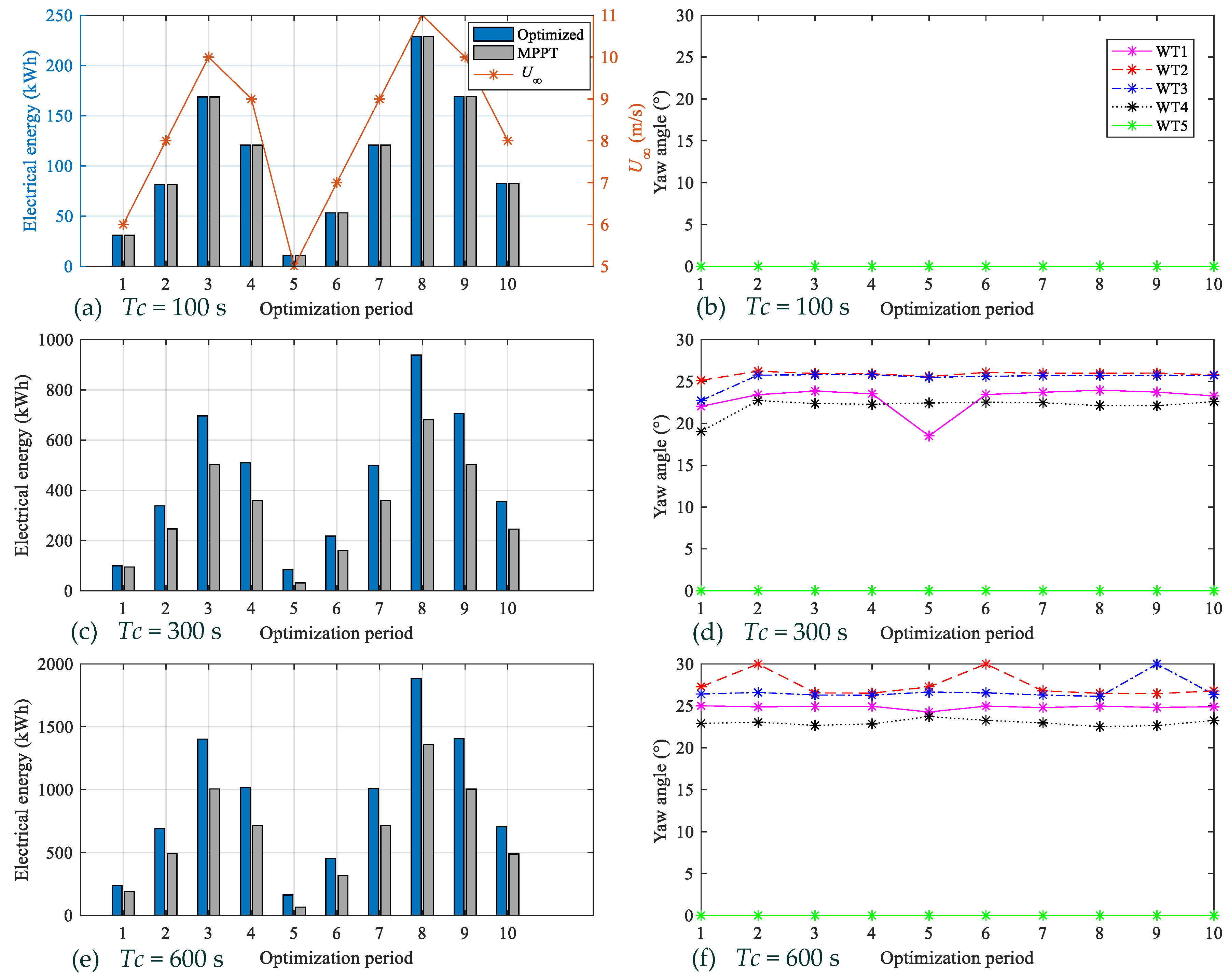
- The wind farm production maximisation through wake meandering is analysed from the perspective of dynamic wake calculation. Different from the optimisation methods based on a static wake model, the increase in wind farm production is closely related to the optimisation period length, due to the time lag of wake propagation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of C(x)
References
- Poudyal, R.; Loskot, P.; Nepal, R.; Parajuli, R.; Khadka, S.K. Mitigating the current energy crisis in Nepal with renewable energy sources. Renew. Sustain. Energy Rev. 2019, 116, 109388. [Google Scholar] [CrossRef]
- Gu, B.; Meng, H.; Ge, M.; Zhang, H.; Liu, X. Cooperative multiagent optimization method for wind farm power delivery maximization. Energy 2021, 233, 121076. [Google Scholar] [CrossRef]
- Khan, M.A.; Javed, A.; Shakir, S.; Syed, A.H. Optimization of a wind farm by coupled actuator disk and mesoscale models to mitigate neighboring wind farm wake interference from repowering perspective. Appl. Energy 2021, 298, 117229. [Google Scholar] [CrossRef]
- Kheirabadi, A.C.; Nagamune, R. A quantitative review of wind farm control with the objective of wind farm power maximization. J. Wind. Eng. Ind. Aerodyn. 2019, 192, 45–73. [Google Scholar] [CrossRef]
- Jensen, N. A Note on Wind Generator Interaction; Risø National Laboratory: Roskilde, Denmark, 1983. [Google Scholar]
- Frandsen, S.; Barthelmie, R.; Pryor, S.; Rathmann, O.; Larsen, S.; Højstrup, J.; Thøgersen, M. Analytical modelling of wind speed deficit in large offshore wind farms. Wind. Energy 2006, 9, 39–53. [Google Scholar] [CrossRef]
- Katic, I.; Højstrup, J.; Jensen, N. A simple model for cluster efficiency. In European Wind Energy Association Conference and Exhibition; Raguzzi, A., Ed.; Rome, Italy, 1986; Volume 1l, pp. 407–410. [Google Scholar]
- Jiménez, Á.; Crespo, A.; Migoya, E. Application of a LES technique to characterize the wake deflection of a wind turbine in yaw. Wind. Energy 2009, 13, 559–572. [Google Scholar] [CrossRef]
- Bastankhah, M.; Porté-Agel, F. Experimental and theoretical study of wind turbine wakes in yawed conditions. J. Fluid Mech. 2016, 806, 506–541. [Google Scholar] [CrossRef]
- Ishihara, T.; Qian, G.-W. A new Gaussian-based analytical wake model for wind turbines considering ambient turbulence intensities and thrust coefficient effects. J. Wind. Eng. Ind. Aerodyn. 2018, 177, 275–292. [Google Scholar] [CrossRef]
- Qian, G.-W.; Ishihara, T. A New Analytical Wake Model for Yawed Wind Turbines. Energies 2018, 11, 665. [Google Scholar] [CrossRef]
- Blondel, F.; Cathelain, M. An alternative form of the super-Gaussian wind turbine wake model. Wind. Energy Sci. 2020, 5, 1225–1236. [Google Scholar] [CrossRef]
- Zong, H.; Porté-Agel, F. Experimental investigation and analytical modelling of active yaw control for wind farm power optimization. Renew. Energy 2021, 170, 1228–1244. [Google Scholar] [CrossRef]
- Lin, J.W.; Zhu, W.J.; Shen, W.Z. New engineering wake model for wind farm applications. Renew. Energy 2022, 198, 1354–1363. [Google Scholar] [CrossRef]
- Martínez-Tossas, L.A.; Annoni, J.; Fleming, P.A.; Churchfield, M.J. The aerodynamics of the curled wake: A simplified model in view of flow control. Wind. Energy Sci. 2019, 4, 127–138. [Google Scholar] [CrossRef]
- Dou, B.; Qu, T.; Lei, L.; Zeng, P. Optimization of wind turbine yaw angles in a wind farm using a three-dimensional yawed wake model. Energy 2020, 209, 118415. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, X. A novel dynamic wind farm wake model based on deep learning. Appl. Energy 2020, 277, 115552. [Google Scholar] [CrossRef]
- Chen, H.; Staupe-Delgado, R. Exploiting more robust and efficacious deep learning techniques for modeling wind power with speed. Energy Rep. 2022, 8, 864–870. [Google Scholar] [CrossRef]
- Cassamo, N.; van Wingerden, J.-W. On the Potential of Reduced Order Models for Wind Farm Control: A Koopman Dynamic Mode Decomposition Approach. Energies 2020, 13, 6513. [Google Scholar] [CrossRef]
- Cassamo, N.R. Model Predictive Control for Wake Steering: A Koopman Dynamic Mode Decomposition Approach; University of Lisbon: Lisbon, Portugal, 2020. [Google Scholar]
- Fortes-Plaza, A.; Campagnolo, F.; Wang, J.; Wang, C.; Bottasso, C.L. A POD reduced-order model for wake steering control. J. Phys. Conf. Ser. 2018, 1037, 032014. [Google Scholar] [CrossRef]
- Gebraad, P.M.O.; van Wingerden, J.W. A Control-Oriented Dynamic Model for Wakes in Wind Plants. J. Phys. Conf. Ser. 2014, 524, 012186. [Google Scholar] [CrossRef]
- Gebraad, P.M.O.; Fleming, P.A.; van Wingerden, J.W. Wind turbine wake estimation and control using FLORIDyn, a control-oriented dynamic wind plant model. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; Volume 2015, pp. 1702–1708. [Google Scholar]
- Kheirabadi, A.C.; Nagamune, R. A low-fidelity dynamic wind farm model for simulating time-varying wind conditions and floating platform motion. Ocean. Eng. 2021, 234, 109313. [Google Scholar] [CrossRef]
- Boersma, S.; Doekemeijer, B.; Vali, M.; Meyers, J.; van Wingerden, J.-W. A control-oriented dynamic wind farm model: WFSim. Wind. Energy Sci. 2018, 3, 75–95. [Google Scholar] [CrossRef]
- Nash, R.; Nouri, R.; Vasel-Be-Hagh, A. Wind turbine wake control strategies: A review and concept proposal. Energy Convers. Manag. 2021, 245, 114581. [Google Scholar] [CrossRef]
- Shen, Y.; Xiao, T.; Lv, Q.; Zhang, X.; Zhang, Y.; Wang, Y.; Wu, J. Coordinated optimal control of active power of wind farms considering wake effect. Energy Rep. 2022, 8, 84–90. [Google Scholar] [CrossRef]
- Gionfra, N.; Sandou, G.; Siguerdidjane, H.; Faille, D.; Loevenbruck, P. Wind farm distributed PSO-based control for constrained power generation maximization. Renew. Energy 2019, 133, 103–117. [Google Scholar] [CrossRef]
- Lin, M.; Porté-Agel, F. Power Production and Blade Fatigue of a Wind Turbine Array Subjected to Active Yaw Control. Energies 2023, 16, 2542. [Google Scholar] [CrossRef]
- Annoni, J.; Gebraad, P.M.O.; Scholbrock, A.K.; Fleming, P.A.; van Wingerden, J.W. Analysis of axial-induction-based wind plant control using an engineering and a high-order wind plant model. Wind Energy 2015, 19, 1135–1150. [Google Scholar] [CrossRef]
- Munters, W.; Meyers, J. Towards practical dynamic induction control of wind farms: Analysis of optimally controlled wind-farm boundary layers and sinusoidal induction control of first-row turbines. Wind. Energy Sci. 2018, 3, 409–425. [Google Scholar] [CrossRef]
- Kheirabadi, A.C.; Nagamune, R. Real-time relocation of floating offshore wind turbine platforms for wind farm efficiency maximization: An assessment of feasibility and steady-state potential. Ocean. Eng. 2020, 208, 107445. [Google Scholar] [CrossRef]
- Fleming, P.; King, J.; Simley, E.; Roadman, J.; Scholbrock, A.; Murphy, P.; Lundquist, J.K.; Moriarty, P.; Fleming, K.; van Dam, J.; et al. Continued results from a field campaign of wake steering applied at a commercial wind farm—Part 2. Wind. Energy Sci. 2020, 5, 945–958. [Google Scholar] [CrossRef]
- Doekemeijer, B.M.; Kern, S.; Maturu, S.; Kanev, S.; Salbert, B.; Schreiber, J.; Campagnolo, F.; Bottasso, C.L.; Schuler, S.; Wilts, F.; et al. Field experiment for open-loop yaw-based wake steering at a commercial onshore wind farm in Italy. Wind. Energy Sci. 2021, 6, 159–176. [Google Scholar] [CrossRef]
- Archer, C.L.; Vasel-Be-Hagh, A. Wake steering via yaw control in multi-turbine wind farms: Recommendations based on large-eddy simulation. Sustain. Energy Technol. Assess. 2019, 33, 34–43. [Google Scholar] [CrossRef]
- Doekemeijer, B.M.; van der Hoek, D.; van Wingerden, J.-W. Closed-loop model-based wind farm control using FLORIS under time-varying inflow conditions. Renew. Energy 2020, 156, 719–730. [Google Scholar] [CrossRef]
- Qian, G.-W.; Ishihara, T. Wind farm power maximization through wake steering with a new multiple wake model for prediction of turbulence intensity. Energy 2021, 220, 119680. [Google Scholar] [CrossRef]
- Stanley, A.P.J.; Bay, C.; Mudafort, R.; Fleming, P. Fast yaw optimization for wind plant wake steering using Boolean yaw angles. Wind. Energy Sci. 2022, 7, 741–757. [Google Scholar] [CrossRef]
- Rak, B.P.; Santos Pereira, R.B. Impact of the wake deficit model on wind farm yield: A study of yaw-based control optimization. J. Wind. Eng. Ind. Aerodyn. 2022, 220, 104827. [Google Scholar] [CrossRef]
- Dong, H.; Zhang, J.; Zhao, X. Intelligent wind farm control via deep reinforcement learning and high-fidelity simulations. Appl. Energy 2021, 292, 116928. [Google Scholar] [CrossRef]
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook; John Wiley & Sons, Ltd: Hoboken, NJ, USA, 2011. [Google Scholar]
- Decker, F.J. Beam distributions beyond RMS. Am. Inst. Phys. 1995, 333, 550–556. [Google Scholar]
- Howland, M.F.; Bossuyt, J.; Martínez-Tossas, L.A.; Meyers, J.; Meneveau, C. Wake structure in actuator disk models of wind turbines in yaw under uniform inflow conditions. J. Renew. Sustain. Energy 2016, 8, 043301. [Google Scholar] [CrossRef]
- Voutsinas, S.; Rados, K.; Zervos, A. On the Analysis of Wake Effects in Wind Parks. Wind. Eng. 1990, 14, 204–219. [Google Scholar]
- NREL FLORIS, Version 2.4; GitHub: San Francisco, CA, USA, 2021.
- Christian, B.; Frederik, Z.; Robert, B.; Taeseong, K.; Anders, Y.; Christian, H.L.; Hartvig, H.M.; Amaral, B.J.P.A.; Mac, G.; Anand, N. The DTU 10-MW reference wind turbine. In Danish Wind Power Research 2013; Technical University of Denmark: Lyngby, Denmark, 2013. [Google Scholar]
- Qian, G.-W.; Song, Y.-P.; Ishihara, T. A control-oriented large eddy simulation of wind turbine wake considering effects of Coriolis force and time-varying wind conditions. Energy 2022, 239, 121876. [Google Scholar] [CrossRef]
- Zhao-Hui, R.; Xiu-Yan, G.; Yuan, Y.; He-Ping, T. Determining the heat transfer coefficient during the continuous casting process using stochastic particle swarm optimization. Case Stud. Therm. Eng. 2021, 28, 101439. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2D | 4D | 6D | 8D | 10D | |
|---|---|---|---|---|---|
| Gaussian-based model | 1.0719 | 1.0719 | 1.0719 | 1.0719 | 1.0719 |
| Jensen model | 1.6639 | 1.6639 | 1.6640 | 1.6641 | 1.6641 |
| Dyn-model | 1.6668 | 1.6677 | 1.6681 | 1.6682 | 1.6682 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, Z.; Xu, C.; Huo, Z.; Han, X.; Xue, F. Yaw Optimisation for Wind Farm Production Maximisation Based on a Dynamic Wake Model. Energies 2023, 16, 3932. https://doi.org/10.3390/en16093932
Deng Z, Xu C, Huo Z, Han X, Xue F. Yaw Optimisation for Wind Farm Production Maximisation Based on a Dynamic Wake Model. Energies. 2023; 16(9):3932. https://doi.org/10.3390/en16093932
Chicago/Turabian StyleDeng, Zhiwen, Chang Xu, Zhihong Huo, Xingxing Han, and Feifei Xue. 2023. "Yaw Optimisation for Wind Farm Production Maximisation Based on a Dynamic Wake Model" Energies 16, no. 9: 3932. https://doi.org/10.3390/en16093932