
Driving Characteristics Analysis Method Based on Real-World Driving Data


Abstract
:1. Introduction
2. Experimental Setup
2.1. Test Vehicle
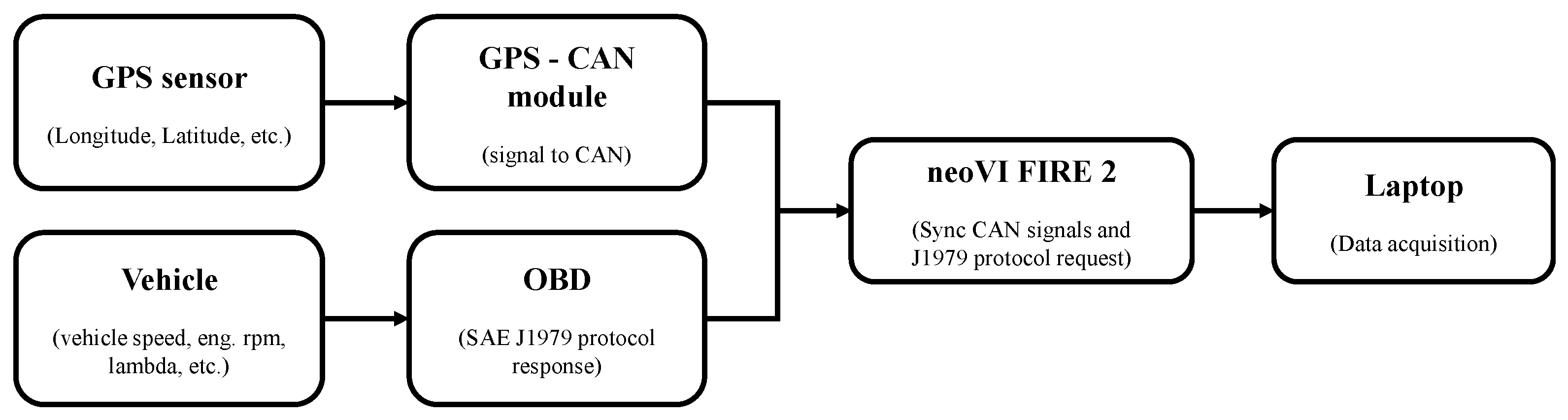
2.2. Data Acquisition System
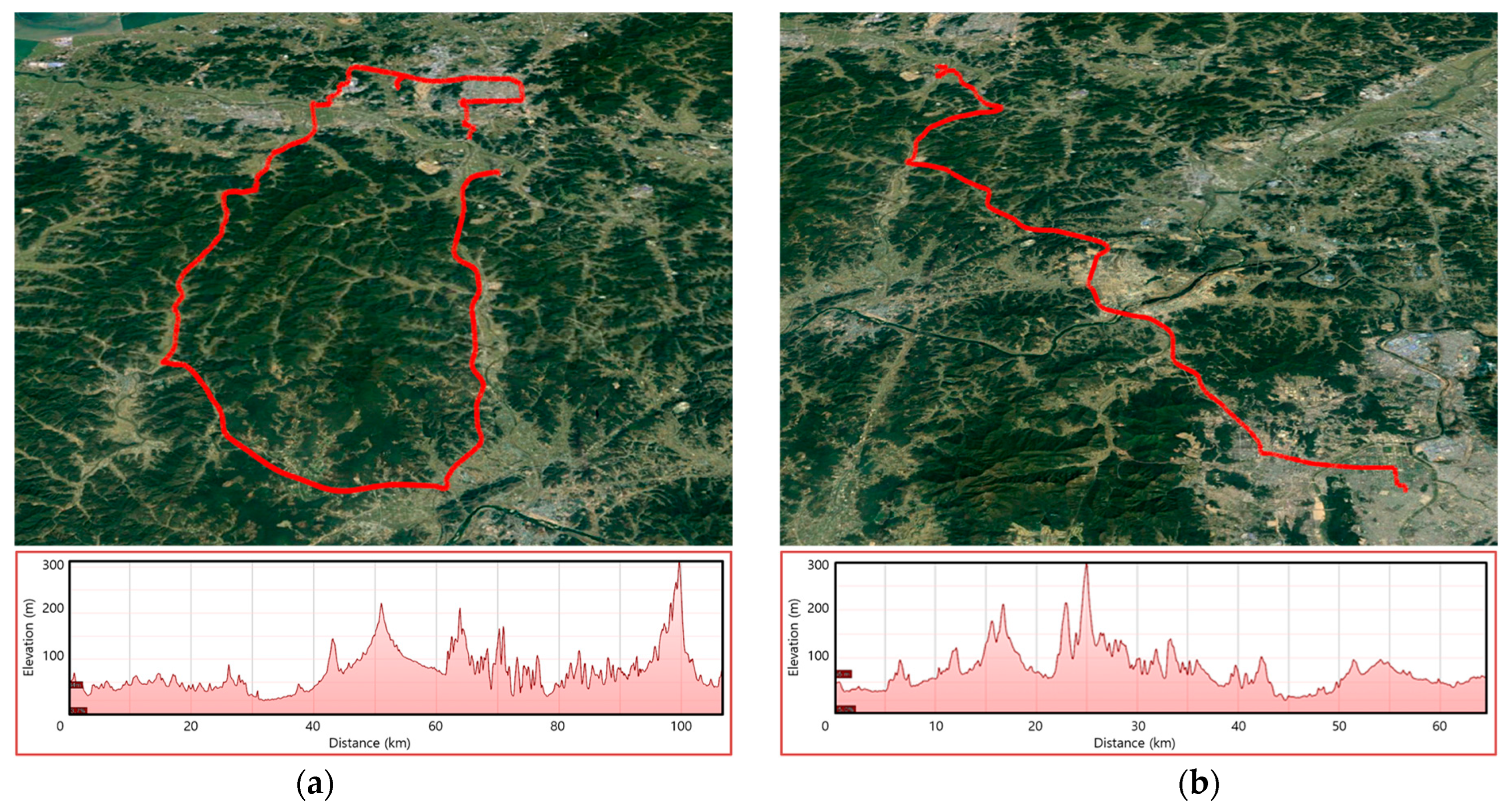
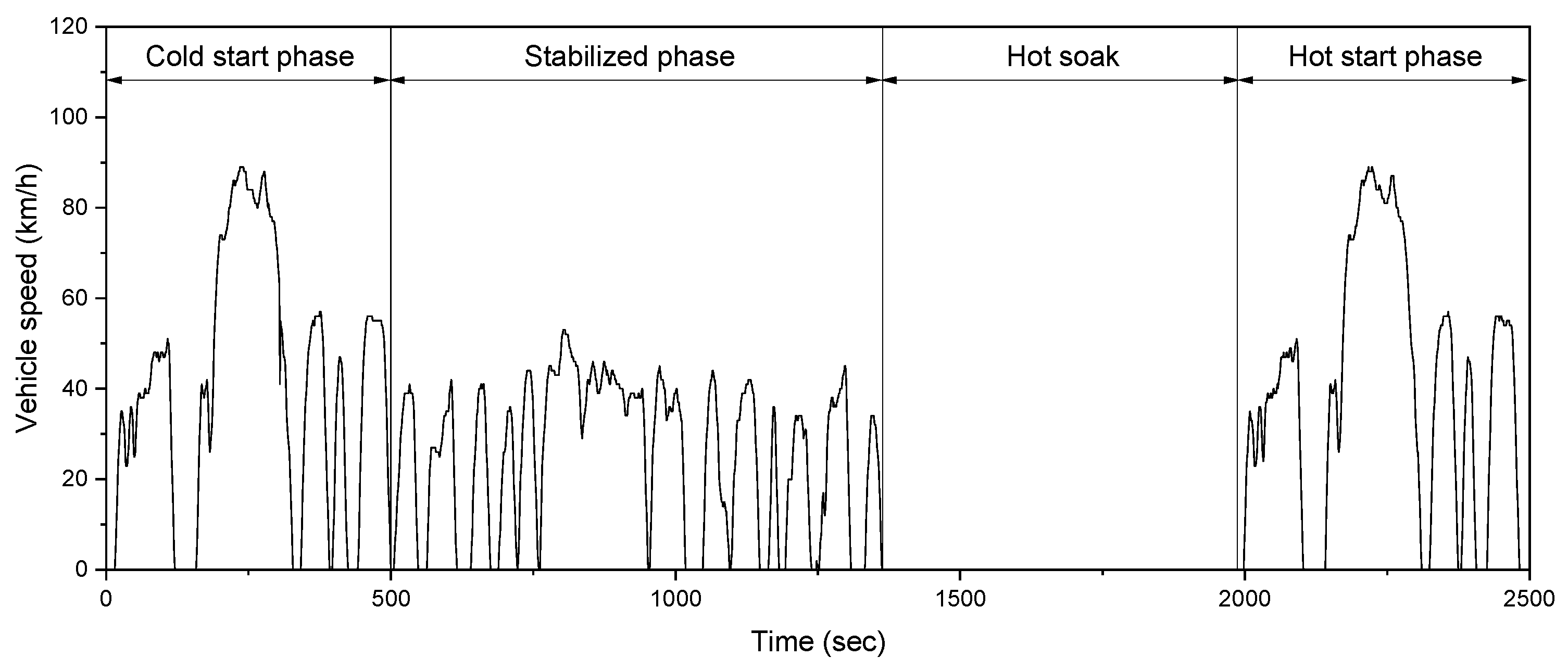
2.3. Real-Road Driving Routes
3. Analytical Methods
3.1. Relative Positive Acceleration
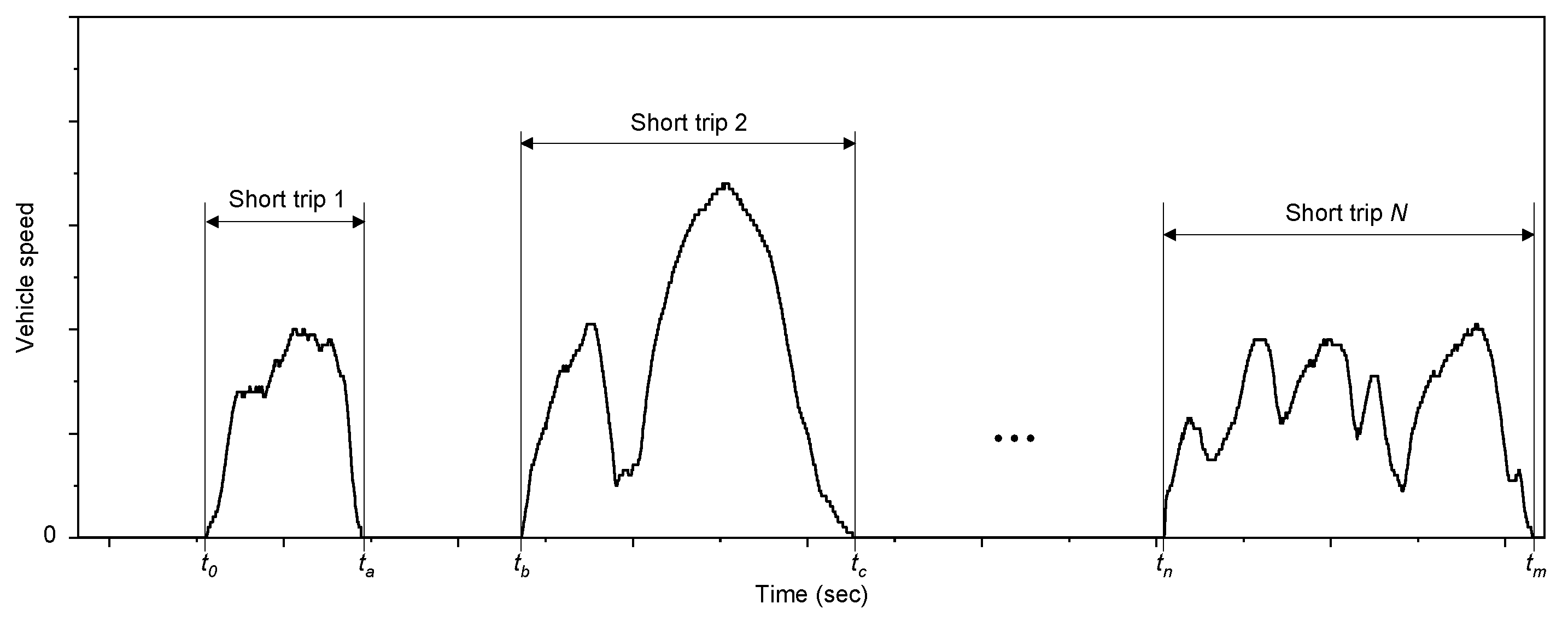
3.2. Short-Trip Analysis
4. Result and Discussion
5. Conclusions
- (1)
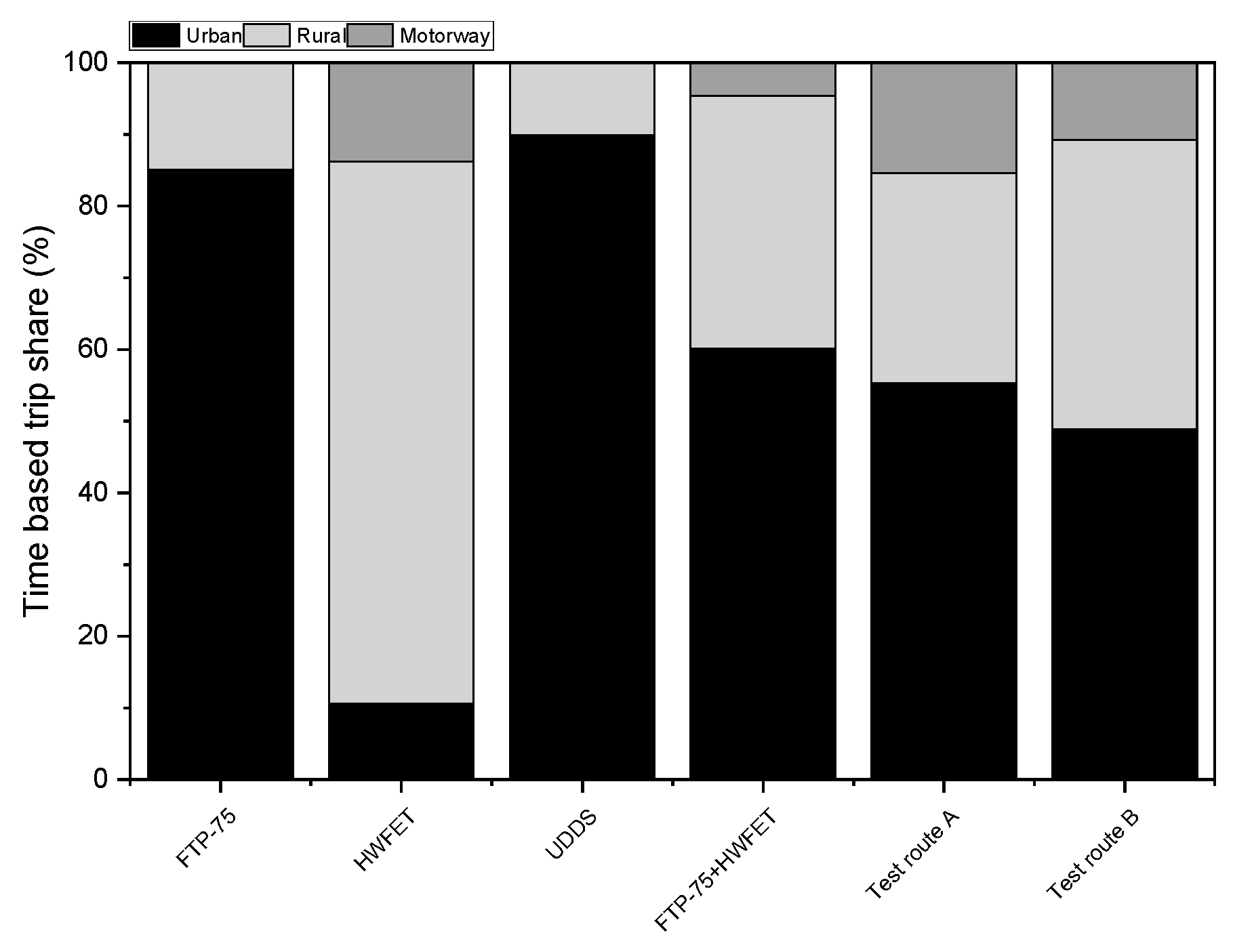
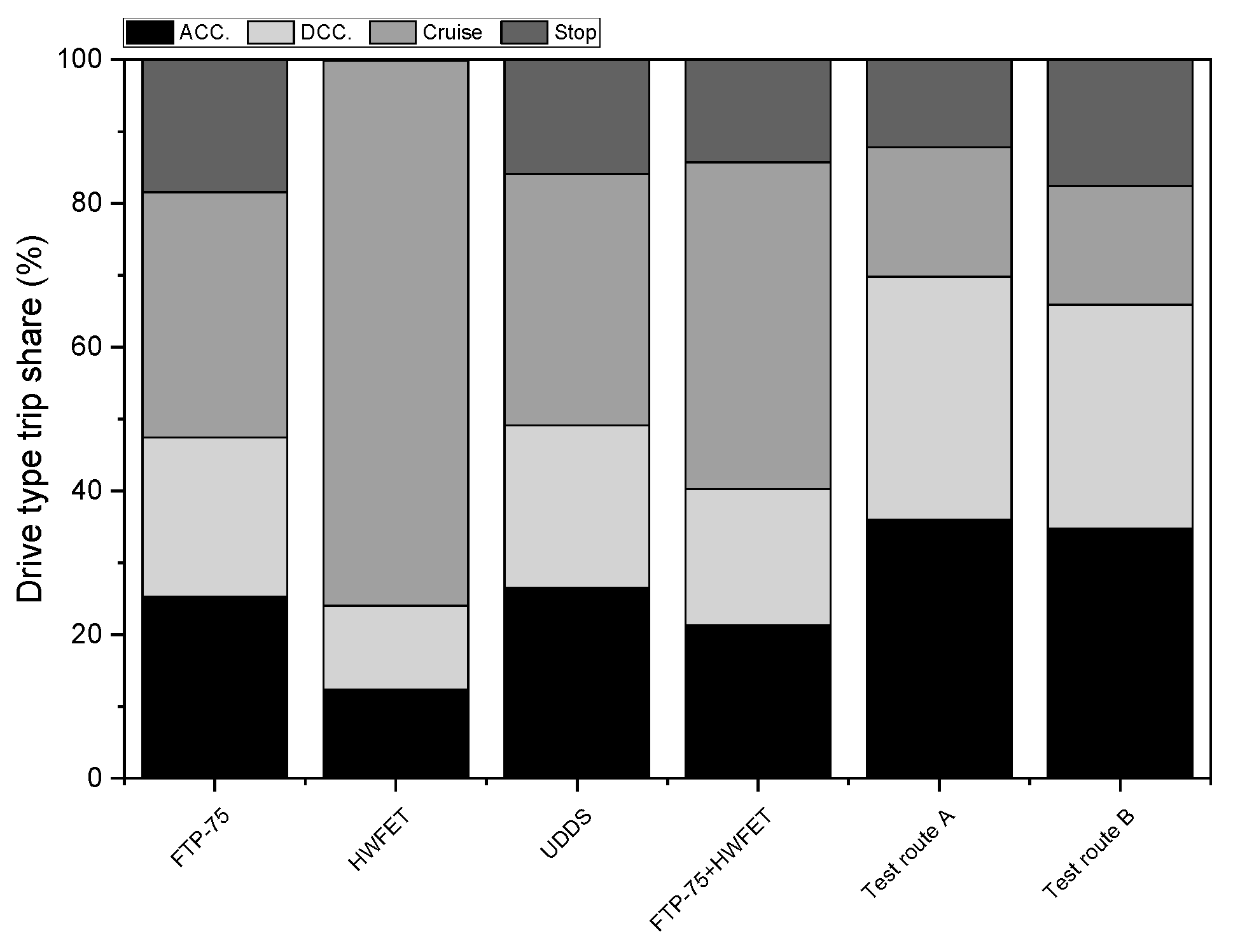
- Because of the traffic flow characteristics of real roads, the proportion of low-speed sections in the driving routes was small. Moreover, the measured acceleration characteristics were high, indicating a divergence from the driving characteristics of the FTP-75 + HWFET mode.
- (2)
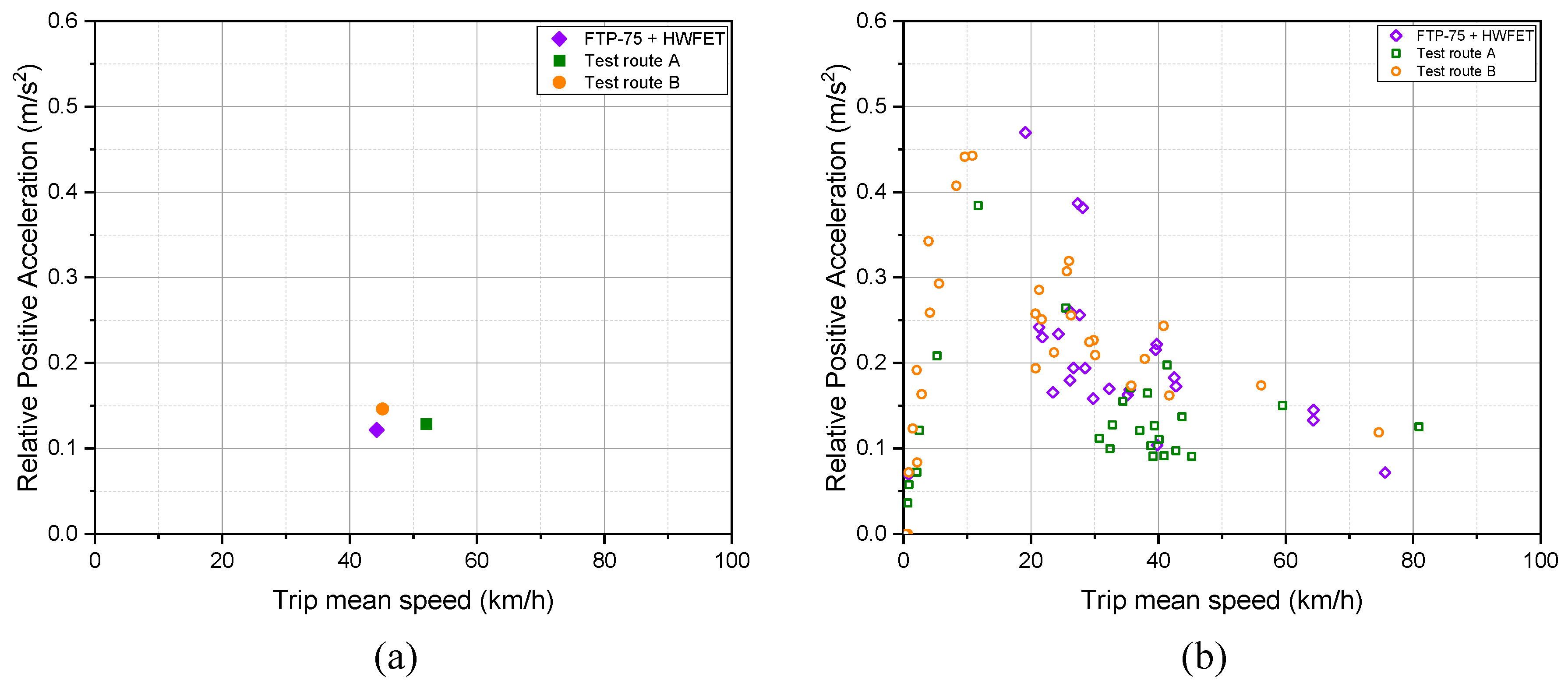
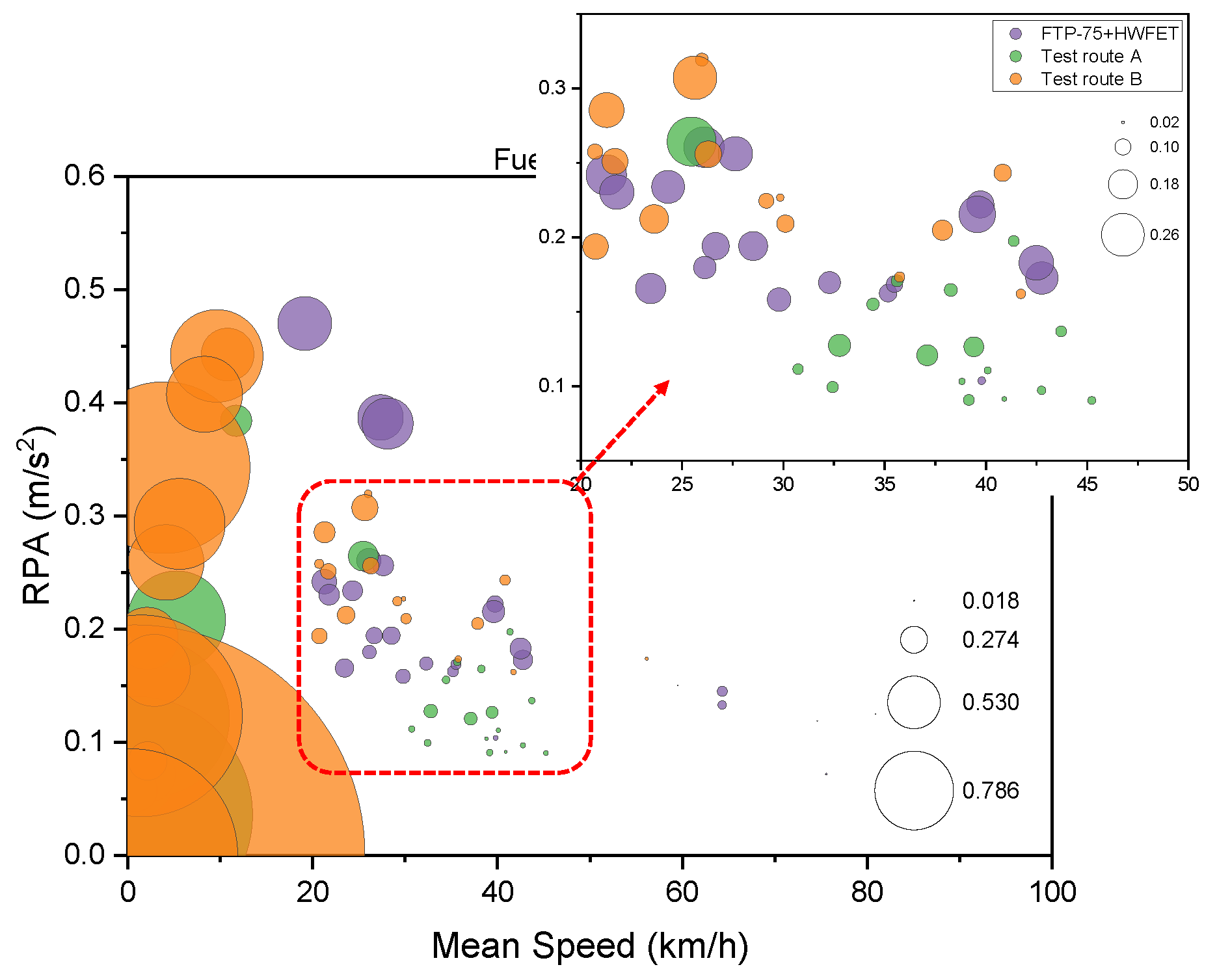
- An analysis of the whole-trip and segmented short-trip RPAs of the driving routes confirmed that the RPA distribution for Test Route B closely follows that of the FTP-75 + HWFET mode.
- (3)
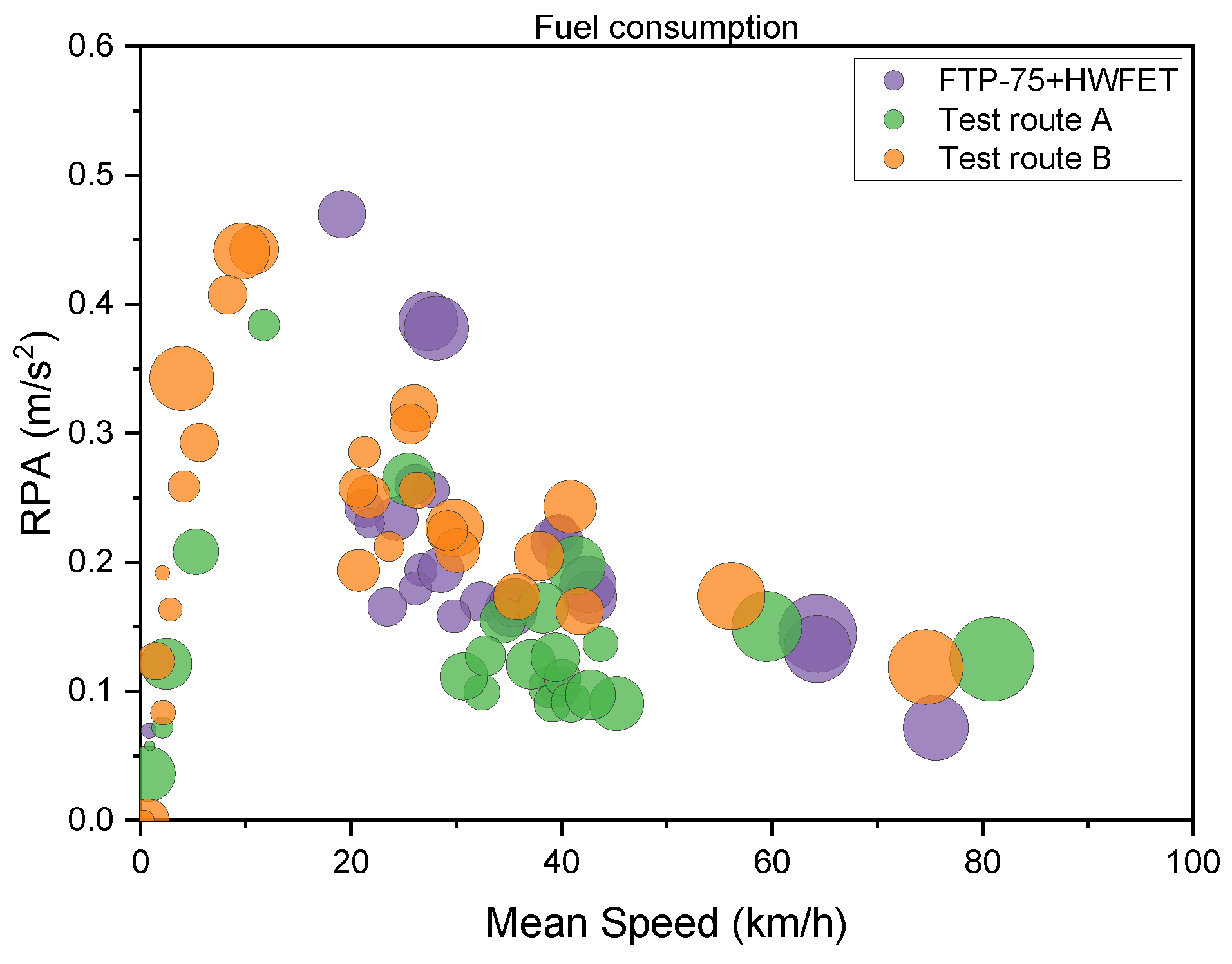
- An analysis of fuel consumption reveals that RPA values and fuel consumption are not directly proportional. Even when RPA values are similar, driving time and fuel consumption can vary. Therefore, additional techniques for evaluating the overall driving characteristics were introduced to complement the existing analysis methods, including RPA analysis to assess harshness, as well as analyses of driving time and fuel consumption.
- (4)
- In the future, we plan to comparatively validate the effectiveness and fuel efficiency of the constructed and certification modes using this analytical method and vehicle testing. Research is ongoing to further supplement and improve analytical methods that use driving time and fuel consumption rates.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, Z.; Bandivadekar, A. Light-Duty Vehicle Greenhouse Gas and Fuel Economy Standards; International Council on Clean Transportation: Washington, DC, USA, 2017; Available online: http://theicct.org/sites/default/files/publications/2017-Global-LDV-Standards-Update_ICCT-Report_23062017_vF.pdf (accessed on 12 November 2023).
- Marz, W.; Goetzke, F. CAFE in the city—A spatial analysis of fuel economy standards. J. Environ. Econ. Manag. 2022, 115, 102711. [Google Scholar] [CrossRef]
- Rho, K.-W.; Shin, D.-W. A study on status analysis and reform of vehicle fuel economy rating system. Korean Energy Econ. Rev. 2012, 11, 121–151. [Google Scholar]
- Lim, J.; Kim, S.; Lee, M.; Kim, K. Study on new type vehicle fuel economy correction formula review according to the applicable. J. Energy Eng. 2016, 25, 198–206. [Google Scholar] [CrossRef]
- Borlaug, B.; Holden, J.; Wood, E.; Lee, B.; Fink, J.; Agnew, S.; Lustbader, J. Estimating region-specific fuel economy in the United States from real-world driving cycles. Transp. Res. Part D Transp. Environ. 2020, 86, 102448. [Google Scholar] [CrossRef]
- Komnos, D.; Tsiakmakis, S.; Pavlovic, J.; Ntziachristos, L.; Fontaras, G. Analysing the real-world fuel and energy consumption of conventional and electric cars in Europe. Energy Convers. Manag. 2022, 270, 116161. [Google Scholar] [CrossRef]
- Shahariar, G.M.H.; Bodisco, T.A.; Zare, A.; Sajjad, M.; Jahirul, M.I.; Chu Van, T.; Bartlett, H.; Ristovski, Z.; Brown, R.J. Impact of driving style and traffic condition on emissions and fuel consumption during real-world transient operation. Fuel 2022, 319, 123874. [Google Scholar] [CrossRef]
- Huang, Y.; Ng, E.C.Y.; Zhou, J.L.; Surawski, N.C.; Lu, X.; Du, B.; Forehead, H.; Perez, P.; Chan, E.F.C. Impact of drivers on real-driving fuel consumption and emissions performance. Sci. Total Environ. 2021, 798, 149297. [Google Scholar] [CrossRef] [PubMed]
- Montazeri-Gh, M.; Naghizadeh, M. Development of car drive cycle for simulation of emissions and fuel economy. In Proceedings of the 15th European Simulation Symposium, Nottingham, UK, 26–29 October 2003. [Google Scholar]
- Degraeuwe, B.; Weiss, M. Does the New European Driving Cycle (NEDC) really fail to capture the NO(X) emissions of diesel cars in Europe? Environ. Pollut. 2017, 222, 234–241. [Google Scholar] [CrossRef] [PubMed]
- Duarte, G.O.; Gonçalves, G.A.; Baptista, P.C.; Farias, T.L. Establishing bonds between vehicle certification data and real-world vehicle fuel consumption–a vehicle specific power approach. Energy Convers. Manag. 2015, 92, 251–265. [Google Scholar] [CrossRef]
- Edwards, A.J. Aggressive-dynamics metrics for drive-cycle characterization. Transp. Res. Interdiscip. Perspect. 2022, 14, 100592. [Google Scholar] [CrossRef]
- Cho, B.; Kees, D.; Shah, N.; d’Urbal, V. A Methodology of Real-World Fuel Consumption Estimation: Part 1. Drive Cycles; SAE Technical Paper 2018-01-0644; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Haan, P.D.; Keller, M. Modelling fuel consumption and pollutant emissions based on real-world driving patterns: The HBEFA approach. Int. J. Environ. Pollut. 2004, 22, 240–258. [Google Scholar] [CrossRef]
- Lee, T.-W.; Keel, J.-H.; Park, K.-K.; Park, J.-H.; Park, Y.-H.; Hong, J.-H.; Lee, D.-Y. Greenhouse gas and pollutant emission from light-duty vehicles regarding the relative positive acceleration. Trans. Korean Soc. Automot. Eng. 2010, 18, 31–39. [Google Scholar]
- Gallus, J.; Kirchner, U.; Vogt, R.; Benter, T. Impact of driving style and road grade on gaseous exhaust emissions of passenger vehicles measured by a Portable Emission Measurement System (PEMS). Transp. Res. Part D Transp. Environ. 2017, 52, 215–226. [Google Scholar] [CrossRef]
- Dhital, N.B.; Wang, S.-X.; Lee, C.-H.; Su, J.; Tsai, M.-Y.; Jhou, Y.-J.; Yang, H.-H. Effects of driving behavior on real-world emissions of particulate matter, gaseous pollutants and particle-bound PAHs for diesel trucks. Environ. Pollut. 2021, 286, 117292. [Google Scholar] [CrossRef] [PubMed]
- Ouali, T.; Shah, N.; Kim, B.; Fuente, D.; Gao, B. Driving Style Identification Algorithm with Real-World Data Based on Statistical Approach; SAE Technical Paper 2016-01-1422; SAE International: Warrendale, PA, USA, 2016; ISSN 0148-7191. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Value |
|---|---|
| Vehicle type | SUV |
| Engine type | V6 NA |
| Fuel | Gasoline |
| Displacement (cc) | 3778 |
| Transmission | Automatic |
| Drivetrain | 2WD |
| Max torque (N·m) | 355 @ 5200 rpm |
| Max power (kW) | 217 @ 6000 rpm |
| Fuel efficiency (km/L) | 9.3 |
| Urban | Rural | Highway | |
|---|---|---|---|
| Vehicle speed range (km/h) | ≤60 | 60–90 | <90 |
| Minimum driving distance (km) | 16 | 16 | 16 |
| Valid average vehicle speed (km/h) | 15–40 | - | 90–110 |
| Average vehicle speed (@ Cold start) (km/h) | 15–40 | - | - |
| Maximum vehicle speed (@ Cold start) (km/h) | 60 | 90 | - |
| Categories | Urban | Rural | Highway | Total | |
|---|---|---|---|---|---|
| Test Route A | Trip share (%) | 37.2 | 35.3 | 27.5 | 100 |
| Trip distance (km) | 39.5 | 37.5 | 29.2 | 106.2 | |
| Test Route B | Trip share (%) | 25.9 | 41.8 | 32.3 | 100 |
| Trip distance (km) | 17.0 | 27.4 | 21.1 | 65.5 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Eom, I.; Lee, B.; Won, J. Driving Characteristics Analysis Method Based on Real-World Driving Data. Energies 2024, 17, 185. https://doi.org/10.3390/en17010185
Lee S, Eom I, Lee B, Won J. Driving Characteristics Analysis Method Based on Real-World Driving Data. Energies. 2024; 17(1):185. https://doi.org/10.3390/en17010185
Chicago/Turabian StyleLee, Sangho, Injae Eom, Beomho Lee, and Janghyeok Won. 2024. "Driving Characteristics Analysis Method Based on Real-World Driving Data" Energies 17, no. 1: 185. https://doi.org/10.3390/en17010185
APA StyleLee, S., Eom, I., Lee, B., & Won, J. (2024). Driving Characteristics Analysis Method Based on Real-World Driving Data. Energies, 17(1), 185. https://doi.org/10.3390/en17010185