

Quantifying Emissions in Vehicles Equipped with Energy-Saving Start–Stop Technology: THC and NOx Modeling Insights


Abstract
1. Introduction
2. Methods
3. Results
Creation of Emission Models and Validation
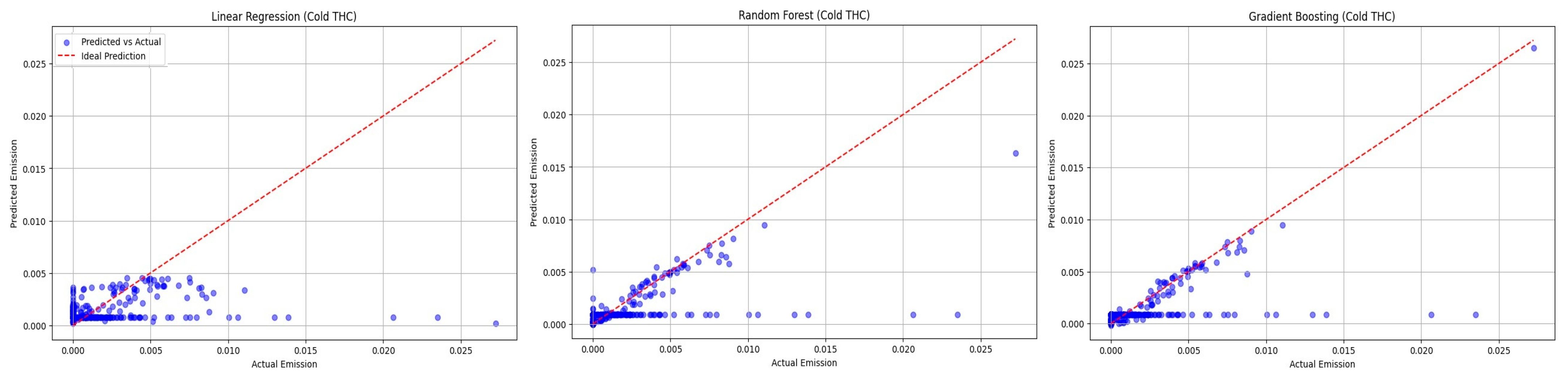
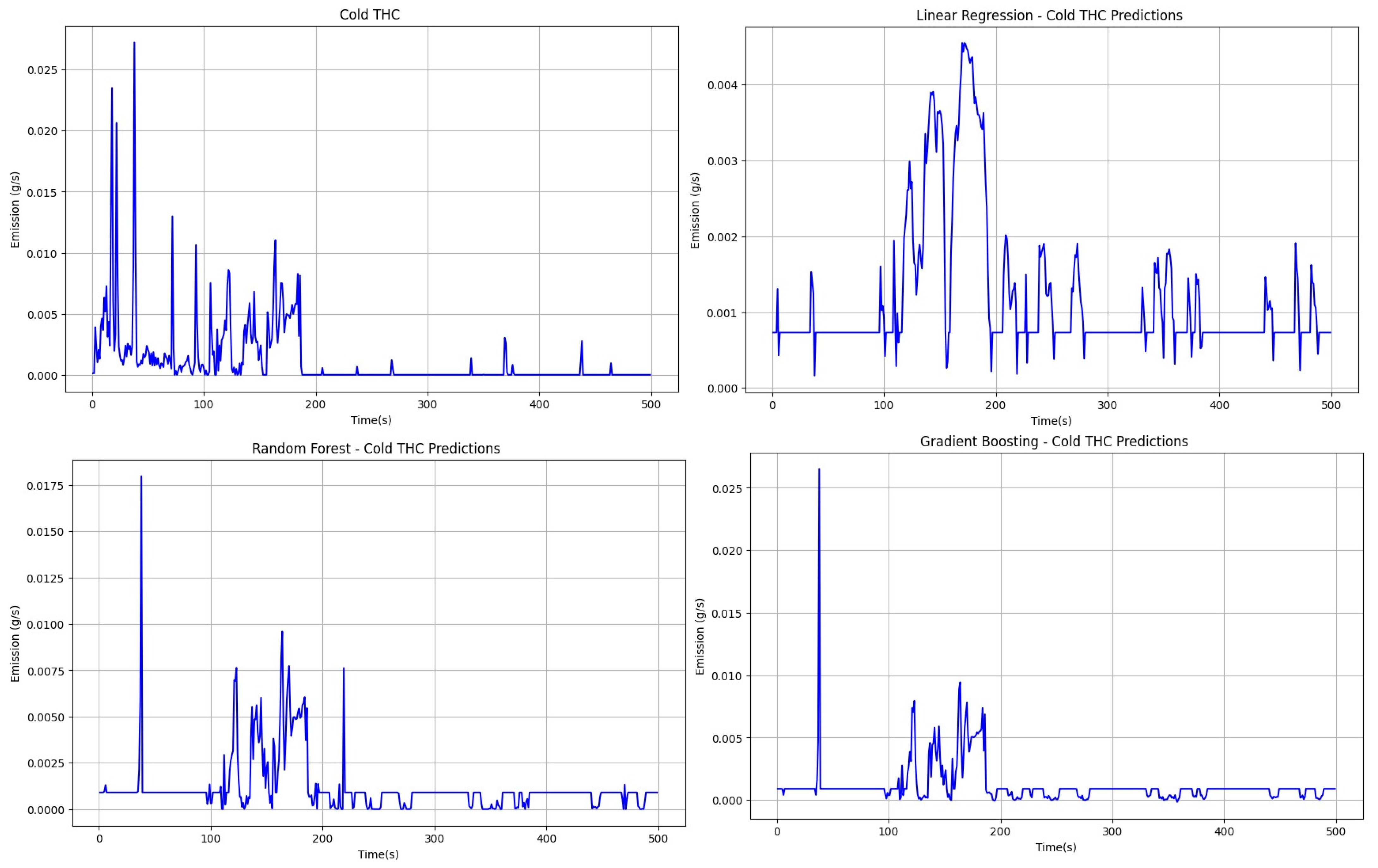
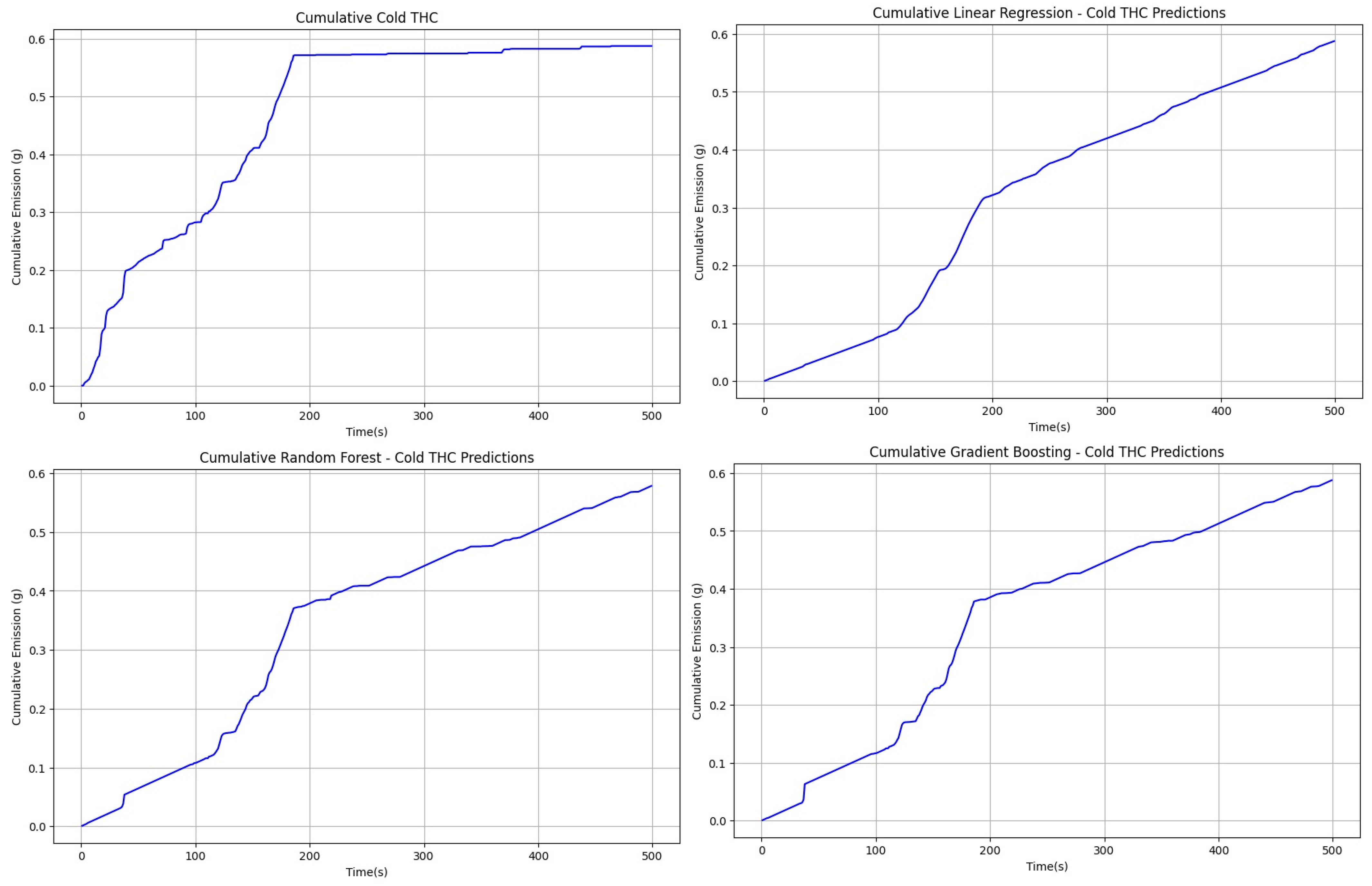
- Figure 11 compares the results of the curves plotted for the computational techniques examined for cold THC emissions. On the basis of this plot, it can be observed that the linear regression method exhibited the poorest predictive performance, while the random forest and gradient boosting methods showed comparable predictive capabilities for cold THC emissions.
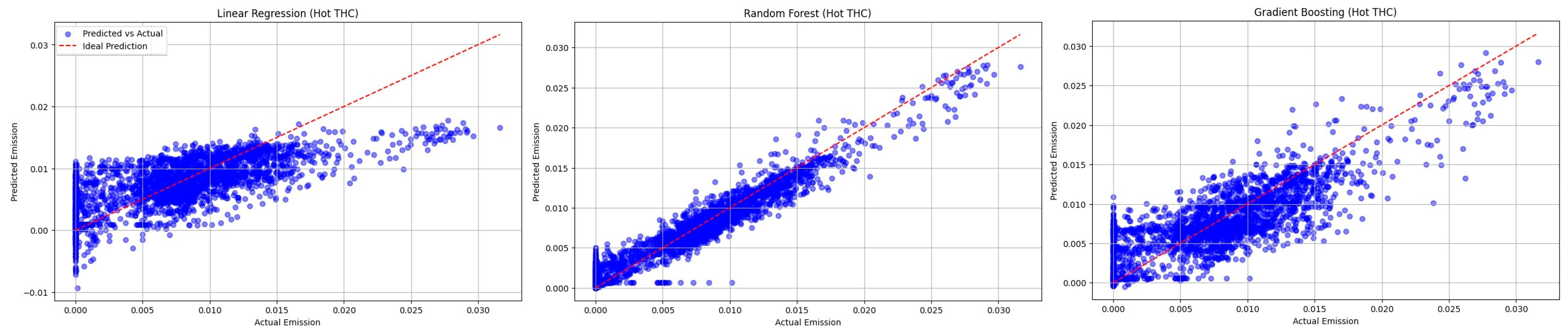
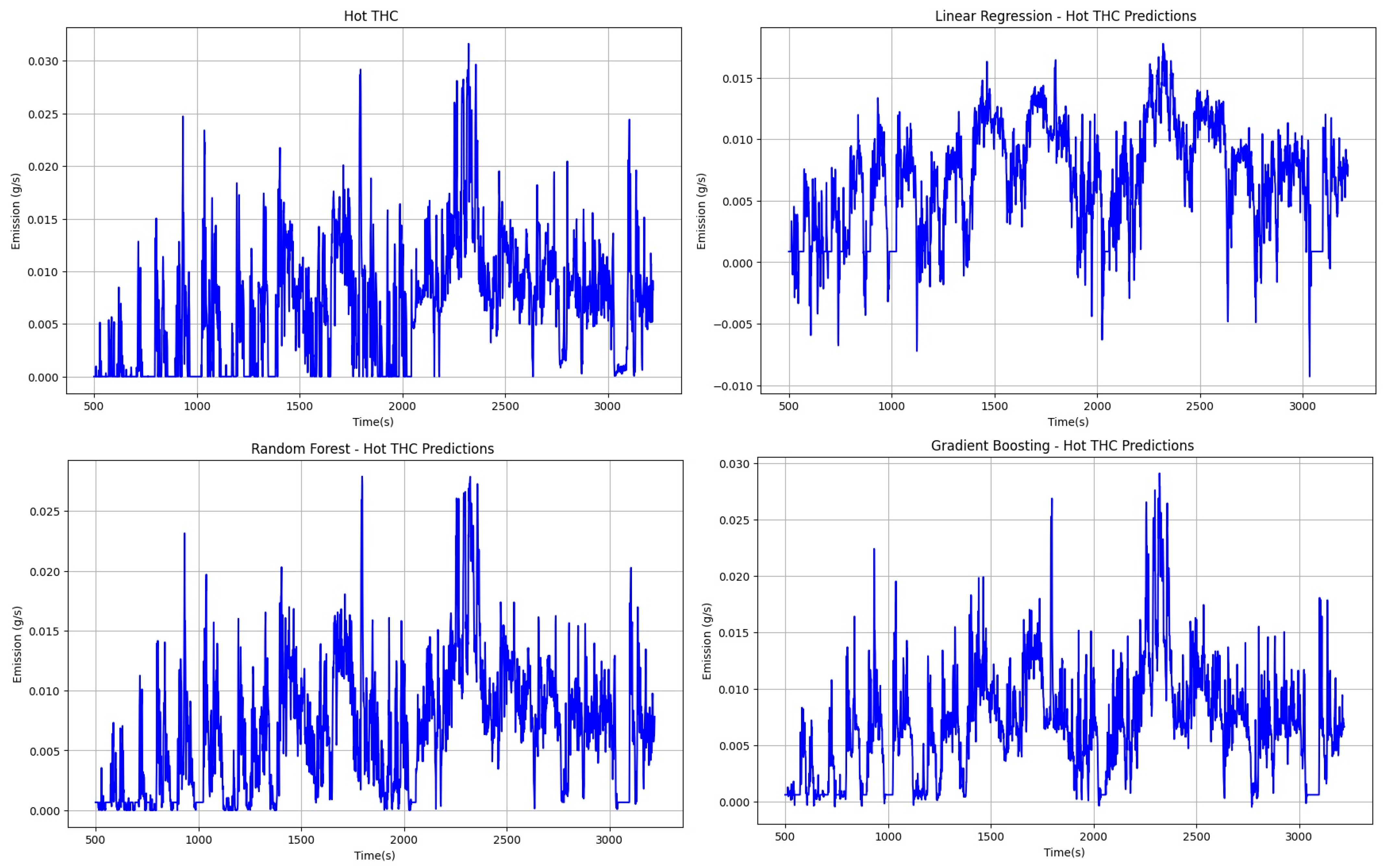
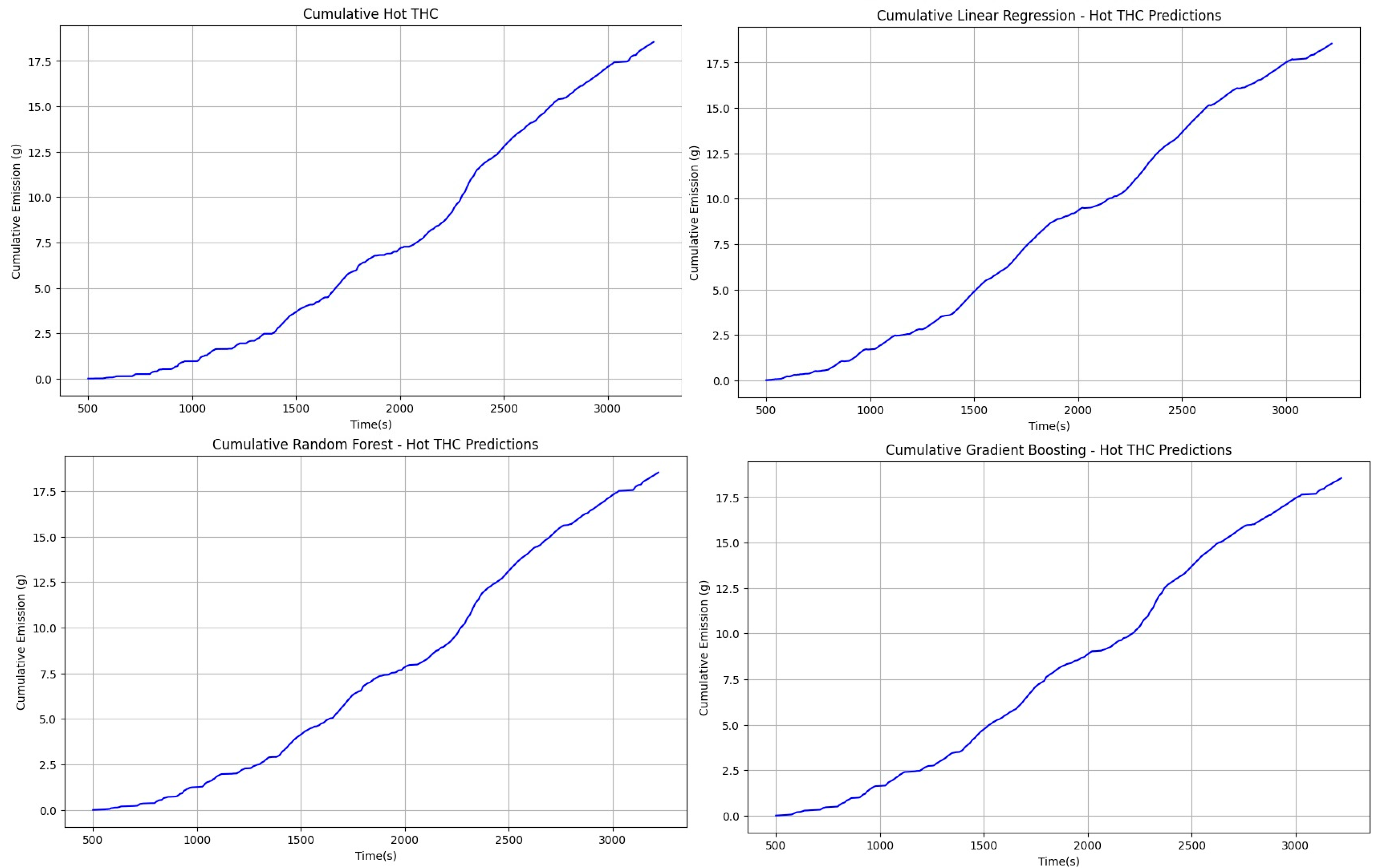
- Figure 12 illustrates the comparison of results for the techniques examined for hot THC emissions. Similarly to the previous plot, the linear regression method also demonstrated the poorest predictive abilities, as evidenced by the data points that deviated the most from the ideal line of data concordance marked in red. The random forest method provided the best reflection of the actual results compared to the model results, with the highest number of values close to the ideal curve.
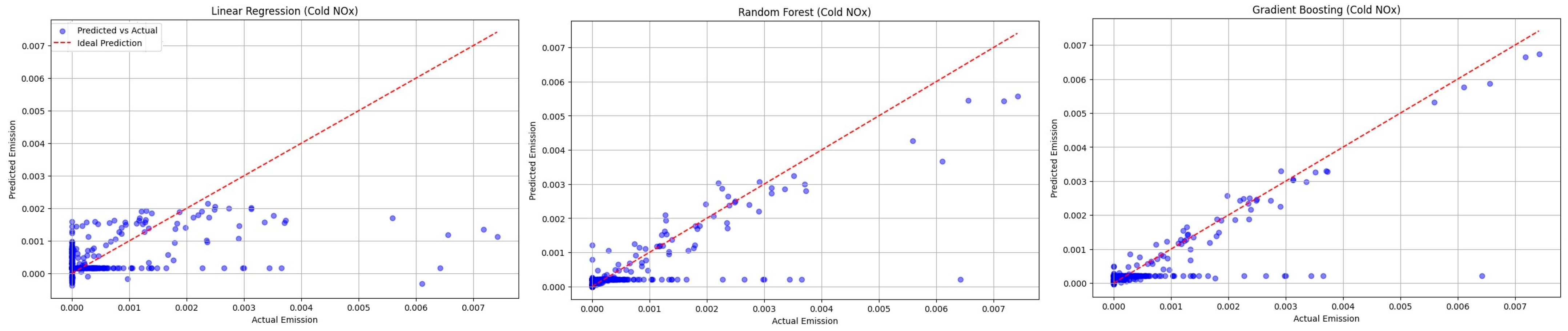
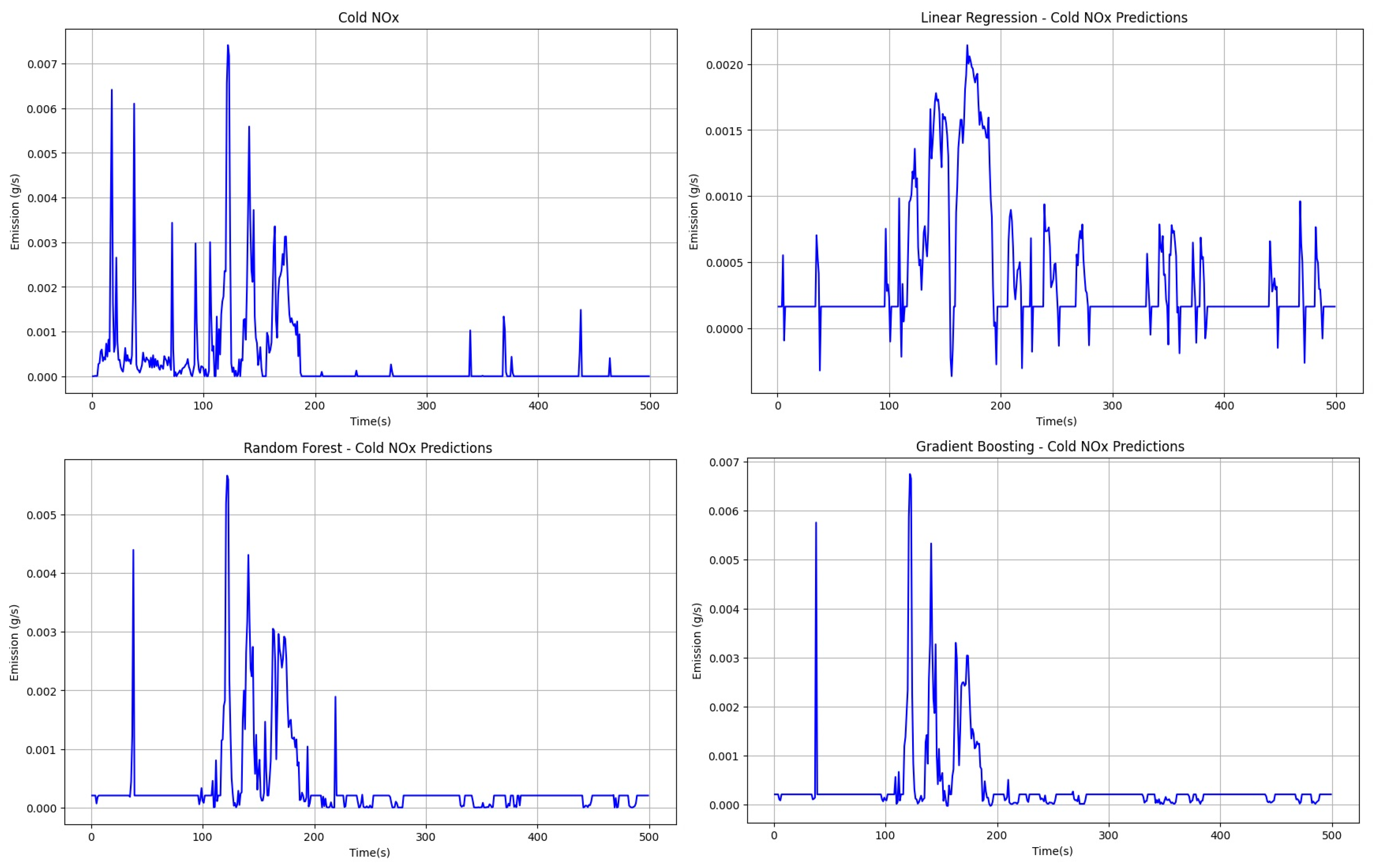
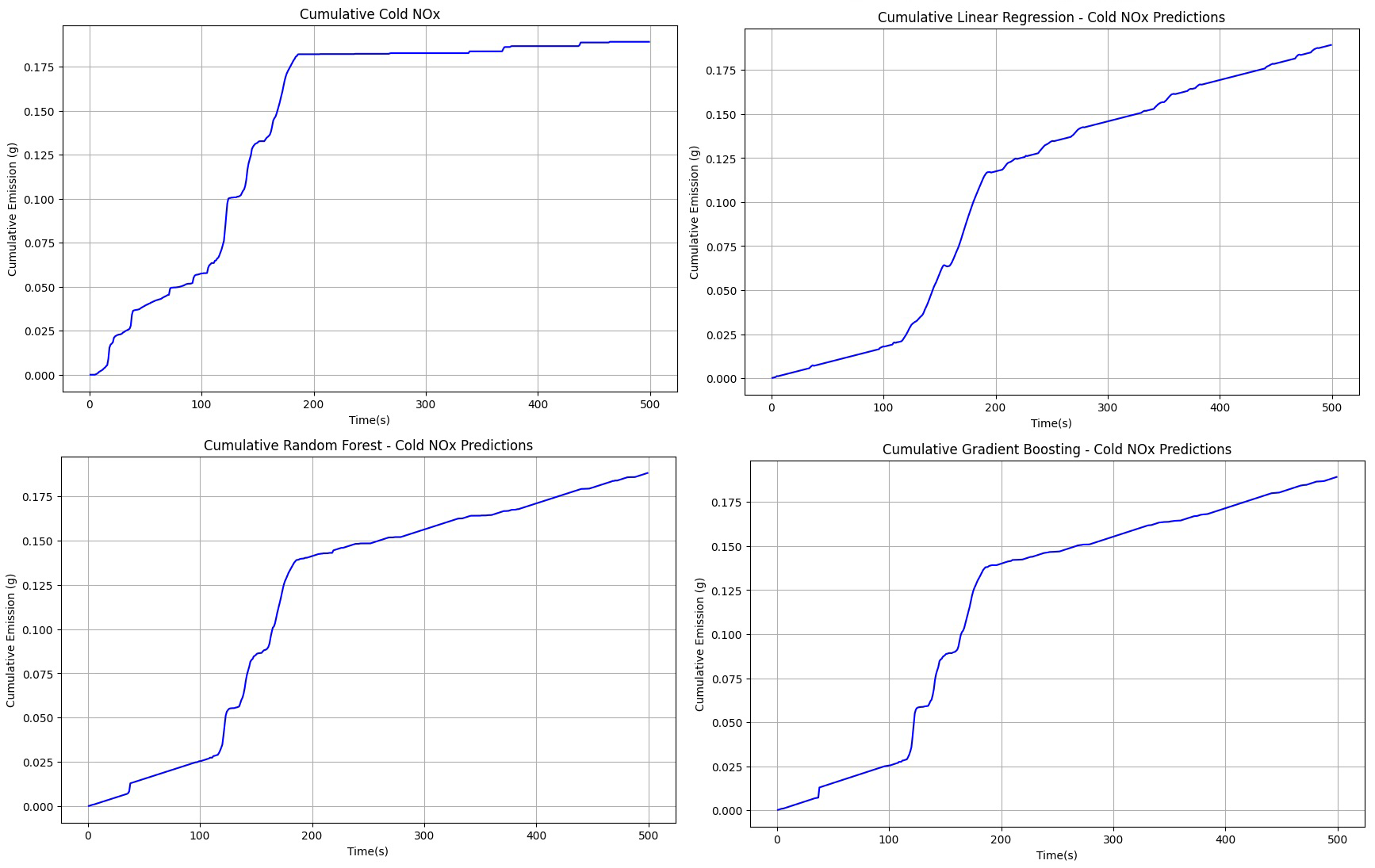
- For NOx emissions during a cold engine start, as shown in Figure 13, it can be observed that similar to THC emissions, random forest and gradient boosting techniques exhibited the best predictive abilities at a similar level, while the linear regression method produced the worst results.
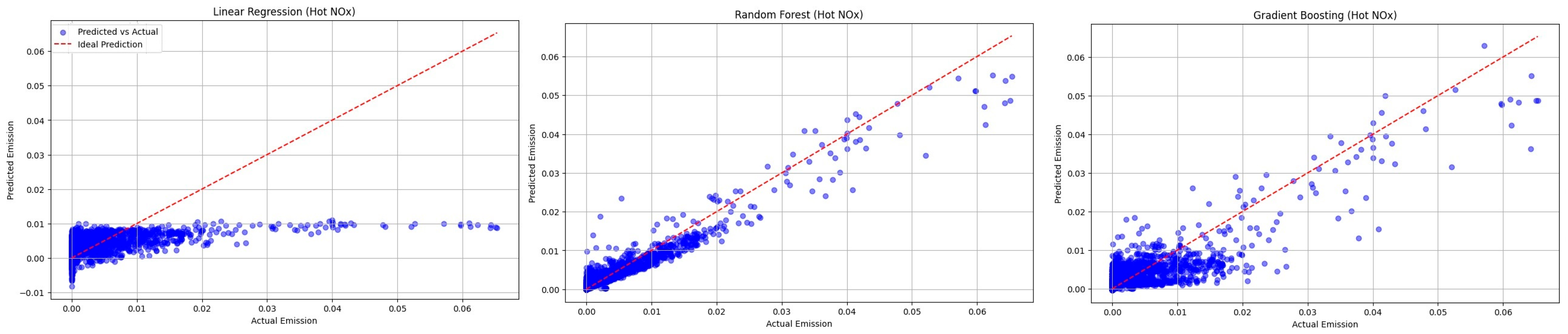
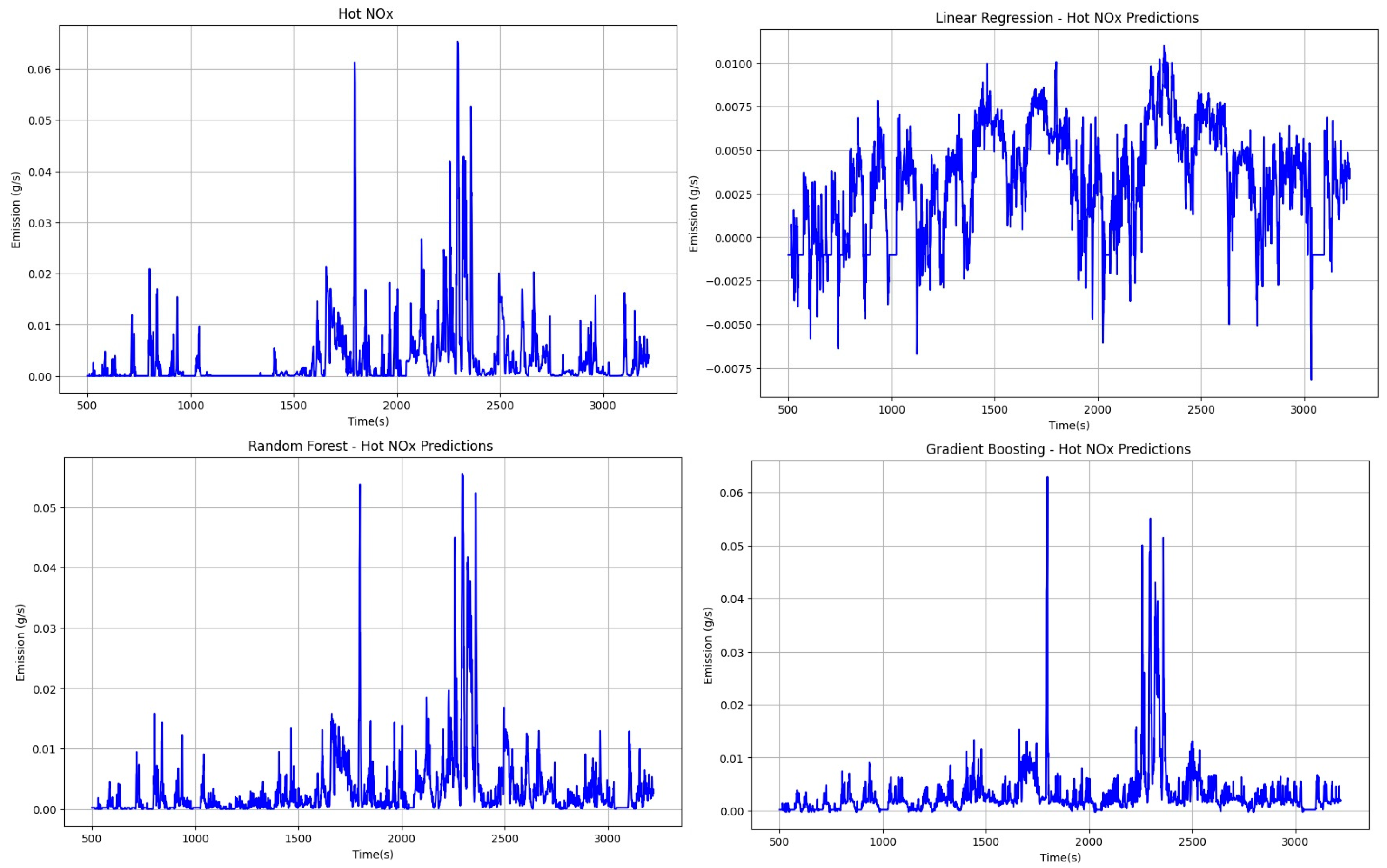
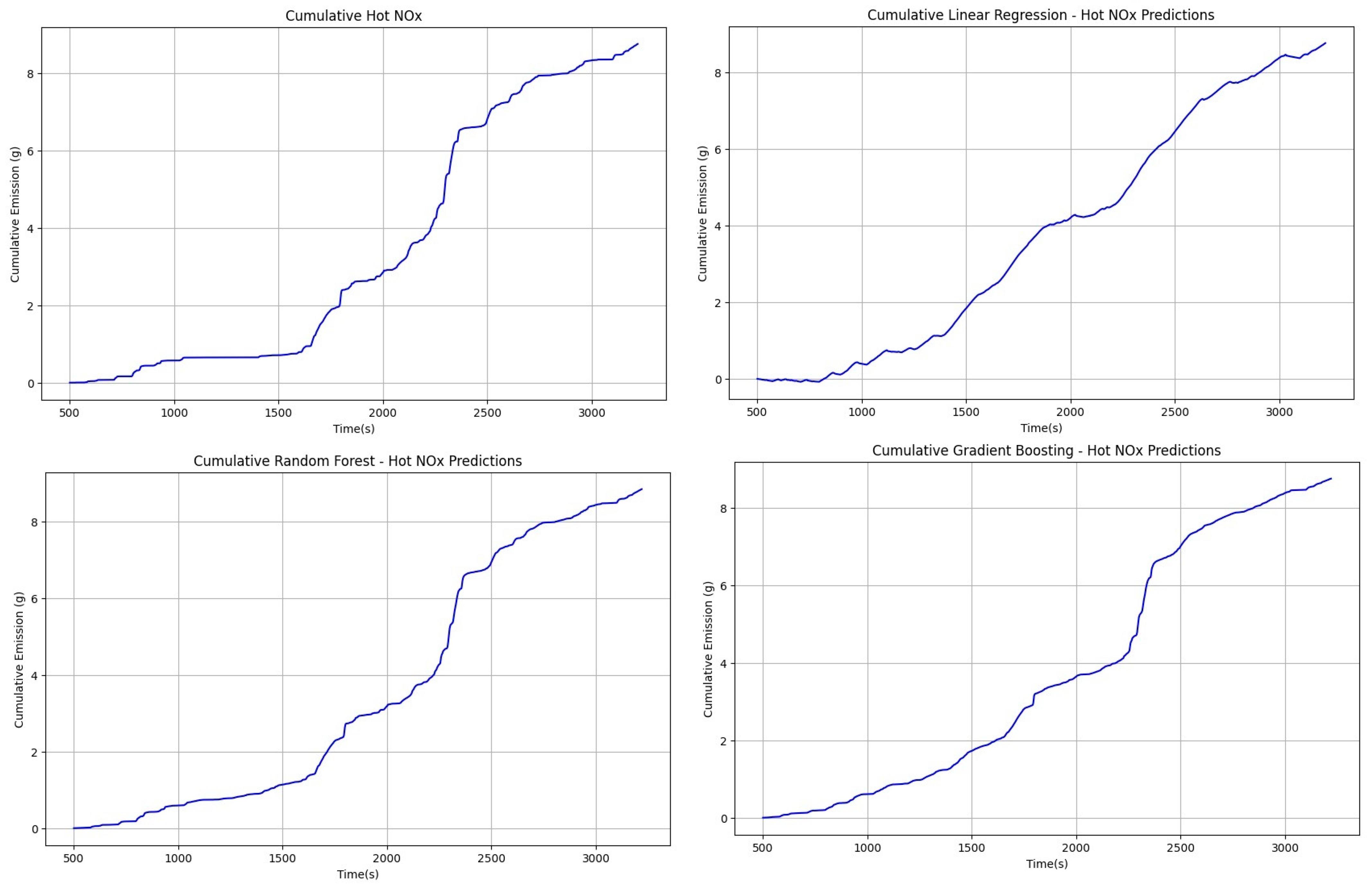
- For NOx emissions in a heated engine, the random forest method demonstrated the best predictive capabilities (Figure 14), while linear regression exhibited the weakest performance.
4. Discussion
Recommendations for Modeling THC and NOx Emissions for a Vehicle Equipped with Start–Stop Technology
- Crucial for modeling such emissions are the predictive capabilities for moments when the engine is stopped and no emissions occur. Therefore, the search for predictive methods should begin with evaluating their ability to predict the vehicle’s idle periods.
- Random forest and gradient boosting techniques provide rapid results and demonstrate the best predictive abilities for both cold and hot emissions from vehicles equipped with start–stop technology.
- Unfortunately, the linear regression method leads to a significant underestimation of emission generation results. Additionally, the generation of negative emission results from this model disqualifies its potential use in modeling emissions from such vehicles.
- Validation of the obtained THC and NOx emission models for start–stop vehicles must be multistage. Therefore, only relying on performance indicators such as R2 and RMSE is insufficient. It is best to supplement these with predicted vs. actual plots, which can, for example, reveal if a particular method predicts negative emission values.
5. Conclusions
- The linear regression technique exhibited the worst predictive capabilities, both for emissions from cold and hot engines. It led to underestimation and negative emission values in certain driving ranges. For example, the R2 values for cold THC emissions were 0.25, and for NOx emissions, they were 0.21.
- For the models developed for cold THC and NOx emissions, other computationally more advanced methods, such as random forest and gradient boosting, also exhibited weak predictive capabilities. Respectively, for these methods, the R2 values were 0.3 and 0.33 for THC emissions and 0.28 and 0.3 for NOx emissions. This was related to the analysis of the correlation between the explanatory input variables of the model and the emission variable.
- Random forest and gradient-boosting techniques demonstrated very good predictive capabilities for emissions from a heated engine. Specifically, for these methods, the R2 values for THC emissions were 0.91 and 0.88, and for NOx emissions, they were 0.92 and 0.85. The accuracy of the developed models was also reflected in the validation plots of predicted vs. actual values and predictions in a new dataset.
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, L.; Weng, D.; Xu, Y.; Hong, B.; Wang, S.; Hu, X.; Zhang, Y.; Wang, Z. Spatio-temporal evolution characteristics of carbon emissions from road transportation in the mainland of China from 2006 to 2021. Sci. Total Environ. 2024, 917, 170430. [Google Scholar] [CrossRef] [PubMed]
- Albuquerque, F.D.; Maraqa, M.A.; Chowdhury, R.; Mauga, T.; Alzard, M. Greenhouse gas emissions associated with road transport projects: Current status, benchmarking, and assessment tools. Transp. Res. Procedia 2020, 48, 2018–2030. [Google Scholar] [CrossRef]
- Duan, L.; Hu, W.; Deng, D.; Fang, W.; Xiong, M.; Lu, P.; Li, Z.; Zhai, C. Impacts of reducing air pollutants and CO2 emissions in urban road transport through 2035 in Chongqing, China. Environ. Sci. Ecotechnol. 2021, 8, 100125. [Google Scholar] [CrossRef] [PubMed]
- Cunanan, C.; Tran, M.K.; Lee, Y.; Kwok, S.; Leung, V.; Fowler, M. A review of heavy-duty vehicle powertrain technologies: Diesel engine vehicles, battery electric vehicles, and hydrogen fuel cell electric vehicles. Clean Technol. 2021, 3, 474–489. [Google Scholar] [CrossRef]
- Bai, S.; Liu, C. Overview of energy harvesting and emission reduction technologies in hybrid electric vehicles. Renew. Sustain. Energy Rev. 2021, 147, 111188. [Google Scholar] [CrossRef]
- Kuszewski, H.; Jaworski, A.; Mądziel, M. Lubricity of Ethanol–Diesel Fuel Blends—Study with the Four-Ball Machine Method. Materials 2021, 14, 2492. [Google Scholar] [CrossRef] [PubMed]
- Kuszewski, H.; Jaworski, A.; Mądziel, M.; Woś, P. The investigation of auto-ignition properties of 1-butanol–biodiesel blends under various temperatures conditions. Fuel 2023, 346, 128388. [Google Scholar] [CrossRef]
- Yu, X.; Sandhu, N.S.; Yang, Z.; Zheng, M. Suitability of energy sources for automotive application–A review. Appl. Energy 2020, 271, 115169. [Google Scholar] [CrossRef]
- Alkawsi, G.; Baashar, Y.; Abbas, U.D.; Alkahtani, A.A.; Tiong, S.K. Review of renewable energy-based charging infrastructure for electric vehicles. Appl. Sci. 2021, 11, 3847. [Google Scholar] [CrossRef]
- Madichetty, S.; Mishra, S.; Basu, M. New trends in electric motors and selection for electric vehicle propulsion systems. IET Electr. Syst. Transp. 2021, 11, 186–199. [Google Scholar] [CrossRef]
- De Paulo, A.F.; Nunes, B.; Porto, G. Emerging green technologies for vehicle propulsion systems. Technol. Forecast. Soc. Change 2020, 159, 120054. [Google Scholar] [CrossRef]
- Wang, D.; Jiang, M.; He, K.; Li, X.; Li, F. Study on vibration suppression method of vehicle with engine start-stop and automatic start-stop. Mech. Syst. Signal Process. 2020, 142, 106783. [Google Scholar] [CrossRef]
- Zhu, R.; Fu, Y.; Wang, L.; Hu, J.; He, L.; Wang, M.; Lai, Y.; Su, S. Effects of a start-stop system for gasoline direct injection vehicles on fuel consumption and particulate emissions in hot and cold environments. Environ. Pollut. 2022, 308, 119689. [Google Scholar] [CrossRef] [PubMed]
- Santos, N.D.S.A.; Roso, V.R.; Faria, M.T.C. Review of engine journal bearing tribology in start-stop applications. Eng. Fail. Anal. 2020, 108, 104344. [Google Scholar] [CrossRef]
- Chen, B.; Pan, X.; Evangelou, S.A. Optimal Energy Management of Series Hybrid Electric Vehicles with Engine Start–Stop System. IEEE Trans. Control Syst. Technol. 2022, 31, 660–675. [Google Scholar] [CrossRef]
- Barbashov, N.; Polyantseva, A. Method of electric vehicle braking energy recovery. E3S Web Conf. 2024, 471, 02010. [Google Scholar] [CrossRef]
- Briguiet, G.D.O.F.; Lopes, P.H.L.M.; Rodrigues, G.S.; Lopes, E.D.R. Investigation of Powertrains in Hybrid Vehicles (No. 2020-36-0137); SAE Technical Paper; SAE: Warrendale, PA, USA, 2021. [Google Scholar]
- He, L.; You, Y.; Zheng, X.; Zhang, S.; Li, Z.; Zhang, Z.; Wu, Y.; Hao, J. The impacts from cold start and road grade on real-world emissions and fuel consumption of gasoline, diesel and hybrid-electric light-duty passenger vehicles. Sci. Total Environ. 2022, 851, 158045. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, H.; Yu, H.; Liu, Y.; Xing, J. Analysis of Emissions Characteristics and Fuel Consumption of Light-Duty Passenger Vehicles under Different Driving Cycles. In Proceedings of the 2023 4th International Conference on Clean and Green Energy Engineering (CGEE), Ankara, Turkey, 26–28 August 2023; pp. 106–111. [Google Scholar]
- Da Silva, S.F.; Eckert, J.J.; Silva, F.L.; e Silva, L.C.D.A.; Dedini, F.G. Modeling and Simulation of Start/Stop System for Reduction of Vehicle Fuel Consumption and Air Pollutant Emissions; Brazilian Society of Automotive Engineering: São Paulo, Brazil, 2021. [Google Scholar]
- Mera, Z.; Fonseca, N.; Casanova, J.; López, J.M. Influence of exhaust gas temperature and air-fuel ratio on NOx aftertreatment performance of five large passenger cars. Atmos. Environ. 2021, 244, 117878. [Google Scholar] [CrossRef]
- Zhang, H.W.; Tsai, Z.R.; Kok, V.C.; Peng, H.C.; Chen, Y.H.; Tsai, J.J.; Hsu, C.Y. Long-term ambient hydrocarbon exposure and incidence of urinary bladder cancer. Sci. Rep. 2022, 12, 20799. [Google Scholar] [CrossRef] [PubMed]
- Zhao, M.; Xue, P.; Liu, J.; Liao, J.; Guo, J. A review of removing SO2 and NOX by wet scrubbing. Sustain. Energy Technol. Assess. 2021, 47, 101451. [Google Scholar] [CrossRef]
- Khani, M.R.; Barzideh Pour, E.; Rashnoo, S.; Tu, X.; Ghobadian, B.; Shokri, B.; Khadem, A.; Hosseini, S.I. Real diesel engine exhaust emission control: Indirect non-thermal plasma and comparison to direct plasma for NO x, THC, CO, and CO 2. J. Environ. Health Sci. Eng. 2020, 18, 743–754. [Google Scholar] [CrossRef] [PubMed]
- Ndletyana, O.; Madonsela, B.S.; Maphanga, T. Spatial Distribution of PM 10 and NO 2 in Ambient Air Quality in Cape Town CBD, South Africa. Nat. Environ. Pollut. Technol. 2023, 22, 1–13. [Google Scholar] [CrossRef]
- Kulshrestha, U. Acid rain. In Managing Air Quality and Energy Systems; CRC Press: Boca Raton, FL, USA, 2020; pp. 707–727. [Google Scholar]
- Zhang, L. Effects of Acid Rain on Forest Organisms and Countermeasures. Highlights Sci. Eng. Technol. 2023, 69, 292–298. [Google Scholar] [CrossRef]
- Ihedike, C.; Ling, J. Effects of Ozone, Particulate Matter10 and Oxides of Nitrogen on Respiratory Health (COPD and asthma) in Nigeria: A Systematic Review. Lupine Online J. Nurs. Health Care 2022, 3, 364–371. [Google Scholar]
- Kotyla, M.; Banasiewicz, A.; Krot, P.; Śliwiński, P.; Zimroz, R. NOx Emission Prediction of Diesel Vehicles in Deep Underground Mines Using Ensemble Methods. Electronics 2024, 13, 1095. [Google Scholar] [CrossRef]
- Mądziel, M.; Campisi, T. Investigation of Vehicular Pollutant Emissions at 4-Arm Intersections for the Improvement of Integrated Actions in the Sustainable Urban Mobility Plans (SUMPs). Sustainability 2023, 15, 1860. [Google Scholar] [CrossRef]
- Karami, Z.; Kashef, R. Smart transportation planning: Data, models, and algorithms. Transp. Eng. 2020, 2, 100013. [Google Scholar] [CrossRef]
- Zhou, L.; Dang, X.; Sun, Q.; Wang, S. Multi-scenario simulation of urban land change in Shanghai by random forest and CA-Markov model. Sustain. Cities Soc. 2020, 55, 102045. [Google Scholar] [CrossRef]
- Yang, H.; Almutairi, F.; Rakha, H. Eco-driving at signalized intersections: A multiple signal optimization approach. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2943–2955. [Google Scholar] [CrossRef]
- Tumminello, M.L.; Macioszek, E.; Granà, A.; Giuffrè, T. A Methodological Framework to Assess Road Infrastructure Safety and Performance Efficiency in the Transition toward Cooperative Driving. Sustainability 2023, 15, 9345. [Google Scholar] [CrossRef]
- Fang, X.; Tettamanti, T. Change in microscopic traffic simulation practice with respect to the emerging automated driving technology. Period. Polytech. Civ. Eng. 2022, 66, 86–95. [Google Scholar] [CrossRef]
- Severino, A.; Pappalardo, G.; Olayode, I.O.; Canale, A.; Campisi, T. Evaluation of the environmental impacts of bus rapid transit system on turbo roundabout. Transp. Eng. 2022, 9, 100130. [Google Scholar] [CrossRef]
- Mądziel, M. Vehicle Emission Models and Traffic Simulators: A Review. Energies 2023, 16, 3941. [Google Scholar] [CrossRef]
- Massaguer, A.; Pujol, T.; Comamala, M.; Massaguer, E. Feasibility study on a vehicular thermoelectric generator coupled to an exhaust gas heater to improve aftertreatment’s efficiency in cold-starts. Appl. Therm. Eng. 2020, 167, 114702. [Google Scholar] [CrossRef]
- Liu, C.; Pei, Y.; Wu, C.; Zhang, F.; Qin, J. Novel insights into the NOx emissions characteristics in PEMS tests of a heavy-duty vehicle under different payloads. J. Environ. Manag. 2023, 348, 119400. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Liu, Y.; Wu, L.; Martinet, S.; Zhang, Y.; Andre, M.; Mao, H. Real-world gaseous emission characteristics of Euro 6b light-duty gasoline-and diesel-fueled vehicles. Transp. Res. Part D Transp. Environ. 2020, 78, 102215. [Google Scholar] [CrossRef]
- Zimakowska-Laskowska, M.; Laskowski, P.; Zasina, D. The Impact of the Fleet Age Structure on the Cold-Start Emission. Case Study of the Polish Passenger C and Light Commercial Vehicles (No. 2020-01-2091); SAE Technical Paper; SAE: Warrendale, PA, USA, 2020. [Google Scholar]
- Mądziel, M. Liquified Petroleum Gas-Fuelled Vehicle CO2 Emission Modelling Based on Portable Emission Measurement System, On-Board Diagnostics Data, and Gradient-Boosting Machine Learning. Energies 2023, 16, 2754. [Google Scholar] [CrossRef]
- Seo, J.; Yun, B.; Kim, J.; Shin, M.; Park, S. Development of a cold-start emission model for diesel vehicles using an artificial neural network trained with real-world driving data. Sci. Total Environ. 2022, 806, 151347. [Google Scholar] [CrossRef]
- Smit, R.; Ntziachristos, L. Cold start emission modelling for the Australian petrol fleet. Air Qual. Clim. Change 2013, 47, 31–39. [Google Scholar]
- Ziółkowski, A.; Fuć, P.; Lijewski, P.; Bednarek, M.; Jagielski, A.; Kusiak, W.; Igielska-Kalwat, J. The Influence of the Type and Condition of Road Surfaces on the Exhaust Emissions and Fuel Consumption in the Transport of Timber. Energies 2023, 16, 7257. [Google Scholar] [CrossRef]
- Ziółkowski, A.; Fuć, P.; Jagielski, A.; Bednarek, M.; Konieczka, S. Comparison of the Energy Consumption and Exhaust Emissions between Hybrid and Conventional Vehicles, as Well as Electric Vehicles Fitted with a Range Extender. Energies 2023, 16, 4669. [Google Scholar] [CrossRef]
- Vojtisek-Lom, M.; Zardini, A.A.; Pechout, M.; Dittrich, L.; Forni, F.; Montigny, F.; Carriero, M.; Giechaskiel, B.; Martini, G. A miniature Portable Emissions Measurement System (PEMS) for real-driving monitoring of motorcycles. Atmos. Meas. Tech. 2020, 13, 5827–5843. [Google Scholar] [CrossRef]
- Jalolov, T.S. Solving Complex Problems in Python. Am. J. Lang. Lit. Learn. STEM Educ. (2993-2769) 2023, 1, 481–484. [Google Scholar]
- Wu, Q. geemap: A Python package for interactive mapping with Google Earth Engine. J. Open Source Softw. 2020, 5, 2305. [Google Scholar] [CrossRef]
- Milo, T.; Somech, A. Automating exploratory data analysis via machine learning: An overview. In Proceedings of the 2020 ACM SIGMOD International Conference on Management of Data, Portland, OR, USA, 14–19 June 2020; pp. 2617–2622. [Google Scholar]
- Taboada, G.L.; Han, L. Exploratory data analysis and data envelopment analysis of urban rail transit. Electronics 2020, 9, 1270. [Google Scholar] [CrossRef]
- Maulud, D.; Abdulazeez, A.M. A review on linear regression comprehensive in machine learning. J. Appl. Sci. Technol. Trends 2020, 1, 140–147. [Google Scholar] [CrossRef]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R.; Taylor, J. Linear regression. In An Introduction to Statistical Learning: With Applications in Python; Springer International Publishing: Cham, Switzerland, 2023; pp. 69–134. [Google Scholar]
- Hu, J.; Szymczak, S. A review on longitudinal data analysis with random forest. Brief. Bioinform. 2023, 24, bbad002. [Google Scholar] [CrossRef] [PubMed]
- Tanveer, M.; Rajani, T.; Rastogi, R.; Shao, Y.H.; Ganaie, M.A. Comprehensive review on twin support vector machines. Ann. Oper. Res. 2022. [Google Scholar] [CrossRef]
- Pisner, D.A.; Schnyer, D.M. Support vector machine. In Machine Learning; Academic Press: Cambridge, MA, USA, 2020; pp. 101–121. [Google Scholar]
- Bentéjac, C.; Csörgő, A.; Martínez-Muñoz, G. A comparative analysis of gradient boosting algorithms. Artif. Intell. Rev. 2021, 54, 1937–1967. [Google Scholar] [CrossRef]
- Rufo, D.D.; Debelee, T.G.; Ibenthal, A.; Negera, W.G. Diagnosis of diabetes mellitus using gradient boosting machine (LightGBM). Diagnostics 2021, 11, 1714. [Google Scholar] [CrossRef]
- Hodson, T.O. Root mean square error (RMSE) or mean absolute error (MAE): When to use them or not. Geosci. Model Dev. Discuss. 2022, 2022, 1–10. [Google Scholar] [CrossRef]
- Ozili, P.K. The acceptable R-square in empirical modelling for social science research. In Social Research Methodology and Publishing Results: A Guide to Non-Native English Speakers; IGI Global: Hershey, PA, USA, 2023; pp. 134–143. [Google Scholar]
- Mądziel, M. Instantaneous CO2 emission modelling for a Euro 6 start-stop vehicle based on portable emission measurement system data and artificial intelligence methods. Environ. Sci. Pollut. Res. 2024, 31, 6944–6959. [Google Scholar] [CrossRef] [PubMed]
- Mądziel, M. Modelling CO2 Emissions from Vehicles Fuelled with Compressed Natural Gas Based on On-Road and Chassis Dynamometer Tests. Energies 2024, 17, 1850. [Google Scholar] [CrossRef]
- Le Cornec, C.M.; Molden, N.; van Reeuwijk, M.; Stettler, M.E. Modelling of instantaneous emissions from diesel vehicles with a special focus on NOx: Insights from machine learning techniques. Sci. Total Environ. 2020, 737, 139625. [Google Scholar] [CrossRef] [PubMed]
- Mądziel, M. Energy Modeling for Electric Vehicles Based on Real Driving Cycles: An Artificial Intelligence Approach for Microscale Analyses. Energies 2024, 17, 1148. [Google Scholar] [CrossRef]
- Mądziel, M. Future Cities Carbon Emission Models: Hybrid Vehicle Emission Modelling for Low-Emission Zones. Energies 2023, 16, 6928. [Google Scholar] [CrossRef]
- Wang, W.; Memon, F.H.; Lian, Z.; Yin, Z.; Gadekallu, T.R.; Pham, Q.V.; Dev, K.; Su, C. Secure-enhanced federated learning for AI-empowered electric vehicle energy prediction. IEEE Consum. Electron. Mag. 2021, 12, 27–34. [Google Scholar] [CrossRef]
- Rivera-Campoverde, N.D.; Muñoz-Sanz, J.L.; Arenas-Ramirez, B.d.V. Estimation of Pollutant Emissions in Real Driving Conditions Based on Data from OBD and Machine Learning. Sensors 2021, 21, 6344. [Google Scholar] [CrossRef] [PubMed]
- Seo, J.; Park, S. Optimizing model parameters of artificial neural networks to predict vehicle emissions. Atmos. Environ. 2023, 294, 119508. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year of Production | Engine Displacement (cm3) | Fuel | Max Power (kW)/at Engine Speed (rpm) | Max Torque (Nm)/at Engine Speed (rpm) | Transmission Type/Number of Gears | Fuel System | Exhaust Gas Treatment | Curb Weight (kg) |
|---|---|---|---|---|---|---|---|---|
| 2019 | 1560 | Diesel | 88/3500 | 300/1750 | Manual/6 | CR | DPF + SCR + DOC | 1429 |
| Method/Result | R2 (THC) | R2 (NOx) |
|---|---|---|
| Linear regression (Cold) | 0.25 | 0.21 |
| Random forest (Cold) | 0.3 | 0.28 |
| Gradient boosting (Cold) | 0.33 | 0.3 |
| Linear regression (Hot) | 0.42 | 0.35 |
| Random forest (Hot) | 0.91 | 0.92 |
| Gradient boosting (Hot) | 0.88 | 0.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mądziel, M. Quantifying Emissions in Vehicles Equipped with Energy-Saving Start–Stop Technology: THC and NOx Modeling Insights. Energies 2024, 17, 2815. https://doi.org/10.3390/en17122815
Mądziel M. Quantifying Emissions in Vehicles Equipped with Energy-Saving Start–Stop Technology: THC and NOx Modeling Insights. Energies. 2024; 17(12):2815. https://doi.org/10.3390/en17122815
Chicago/Turabian StyleMądziel, Maksymilian. 2024. "Quantifying Emissions in Vehicles Equipped with Energy-Saving Start–Stop Technology: THC and NOx Modeling Insights" Energies 17, no. 12: 2815. https://doi.org/10.3390/en17122815
APA StyleMądziel, M. (2024). Quantifying Emissions in Vehicles Equipped with Energy-Saving Start–Stop Technology: THC and NOx Modeling Insights. Energies, 17(12), 2815. https://doi.org/10.3390/en17122815