

Intelligent Type-2 Fuzzy Logic Controller for Hybrid Microgrid Energy Management with Different Modes of EVs Integration

Abstract
:1. Introduction
- Development of an intelligent controller capable of accommodating real-time, variable inputs. This controller is designed to achieve optimal energy management within HMG environments characterized by uncertainty.
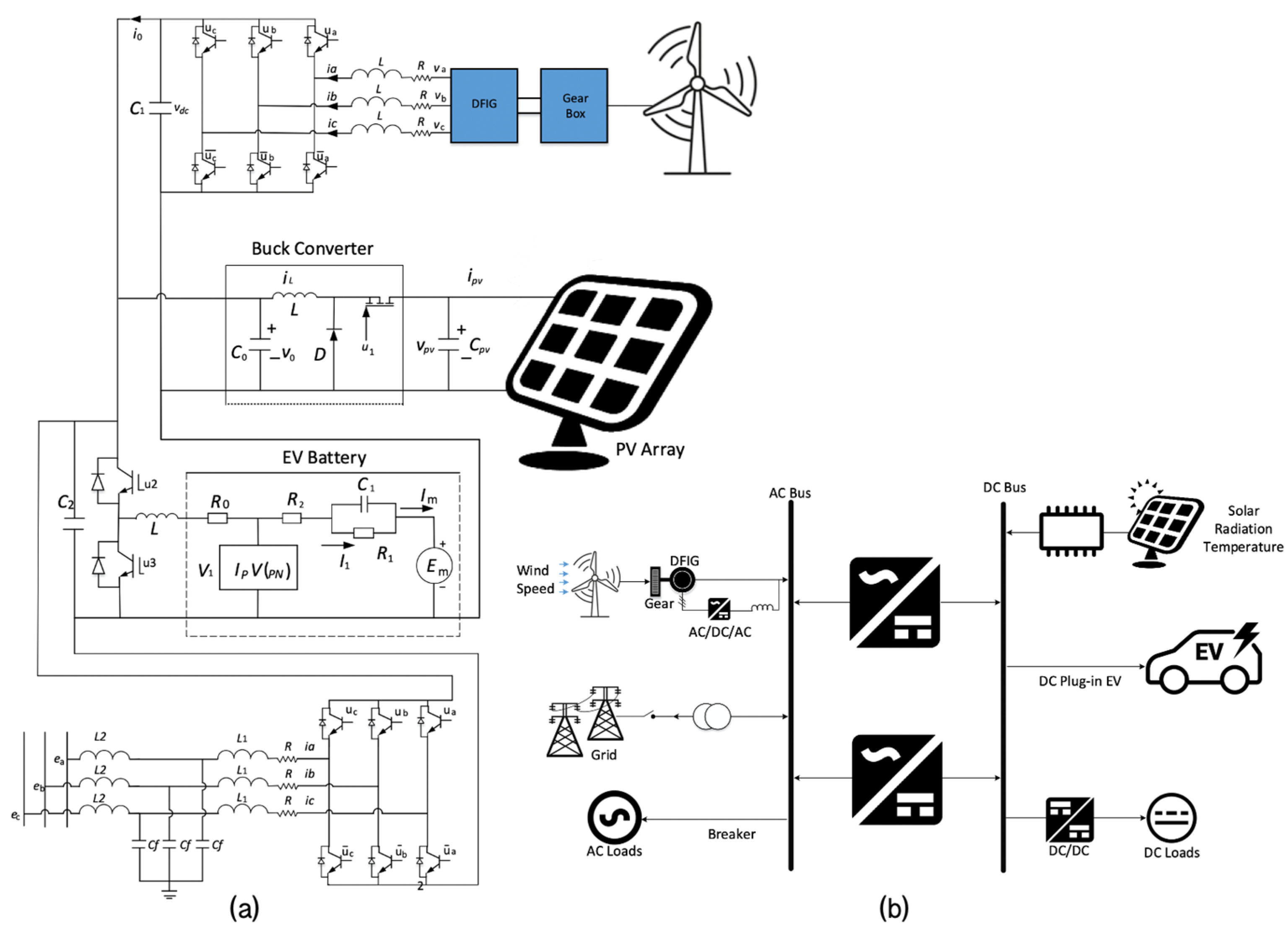
- Detailed modeling of HMGs operational dynamics, including photovoltaic (PV) systems, Doubly Fed Induction Generator (DFIG) units, power electronics components, AC systems, and EV batteries. Addressing such complexities, often oversimplified in existing studies, is important to ensure accurate representation of microgrid dynamics.
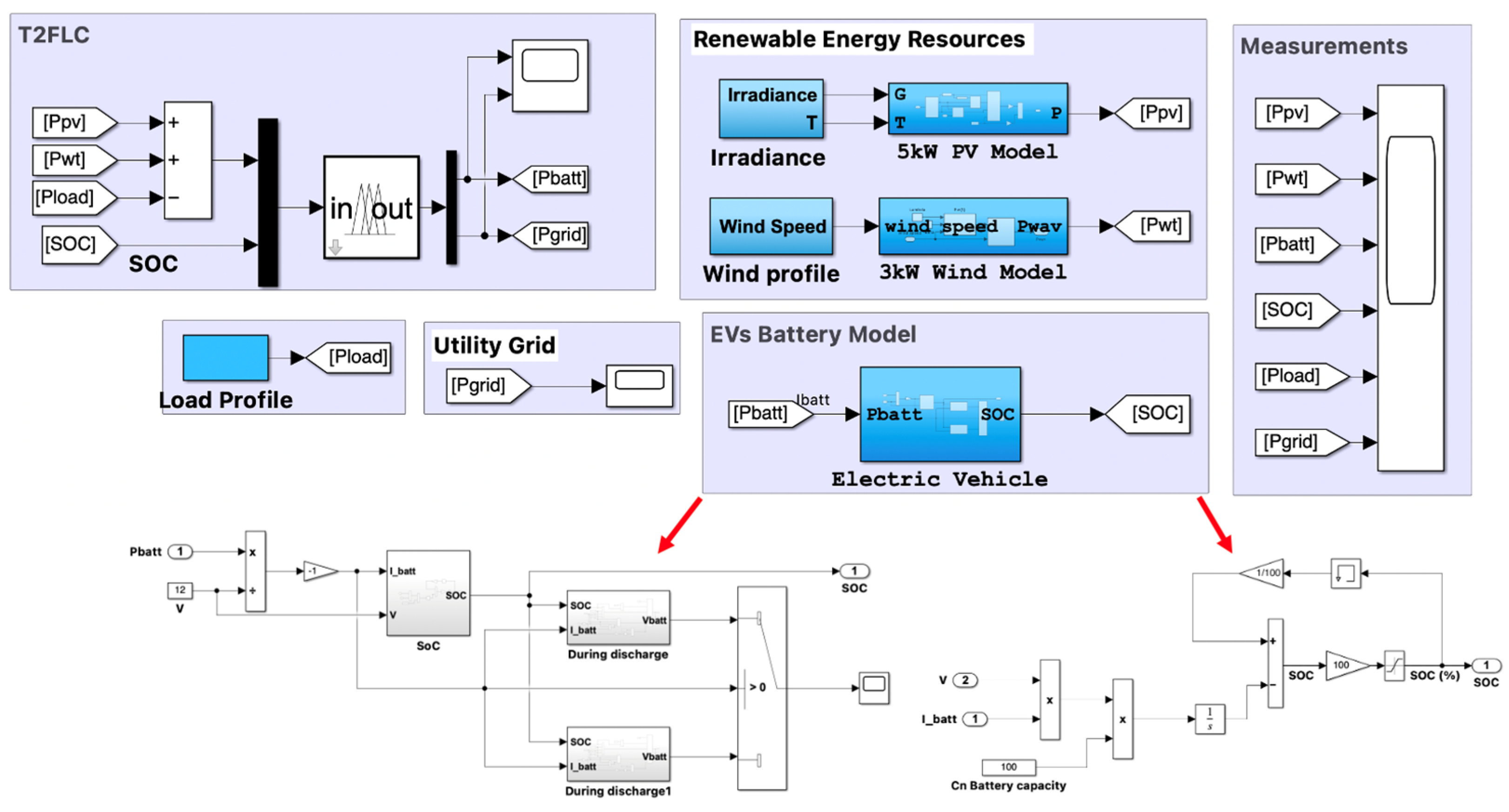
- Creation of a comprehensive Simulink model to empirically validate the functionality of the proposed controller.
- Utilization of a comprehensive dataset reflecting actual yearly variations in solar irradiance, wind velocities, real-life load demands, and EV battery behavior. This enables testing precise and real-time decision-making capability of the proposed controller under dynamic conditions.
2. Mathematical Formulation
2.1. Mathematical Modeling of the Dynamics of Hybrid Microgrids Considering Different Modes of Electric Vehicles Integration
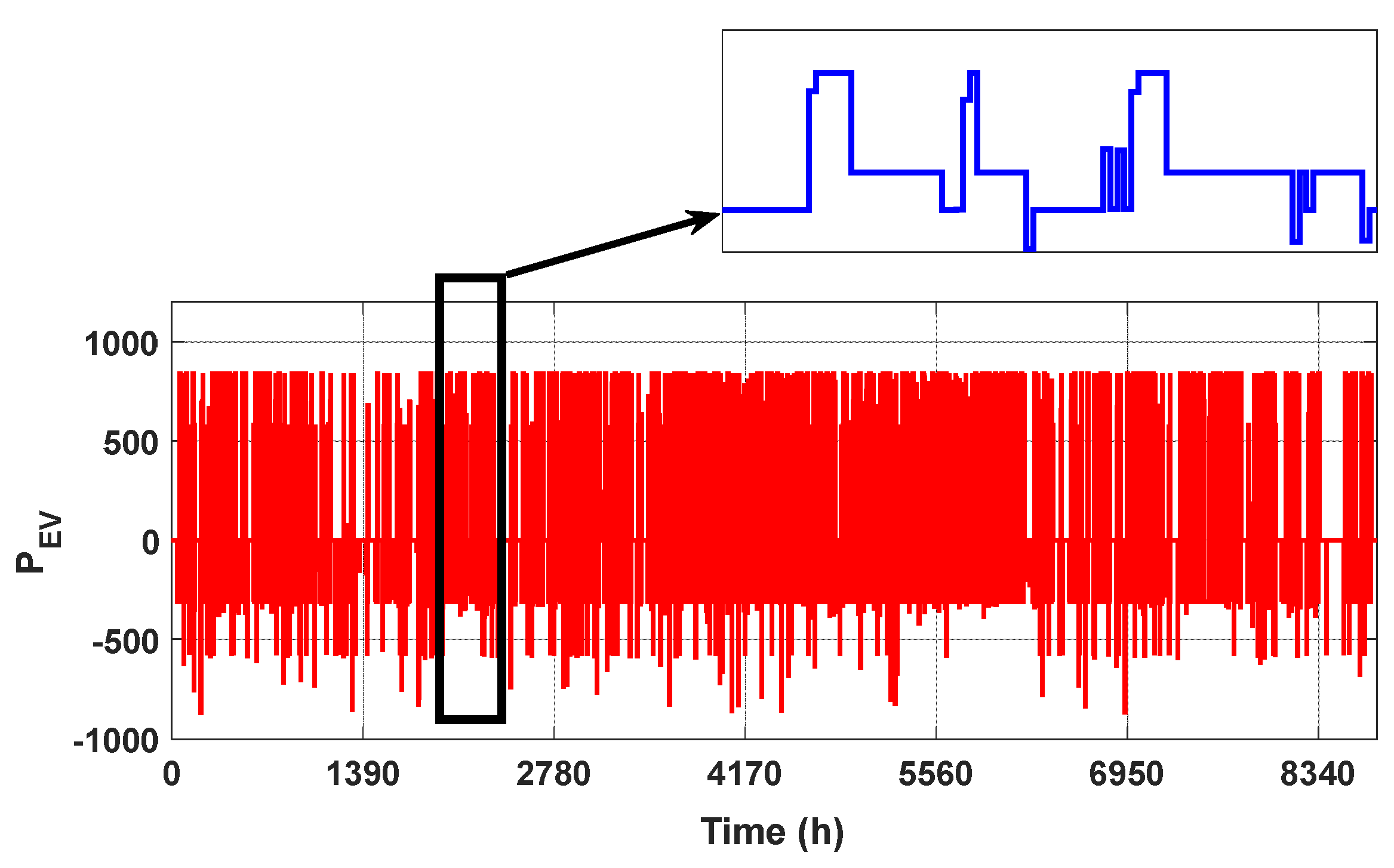
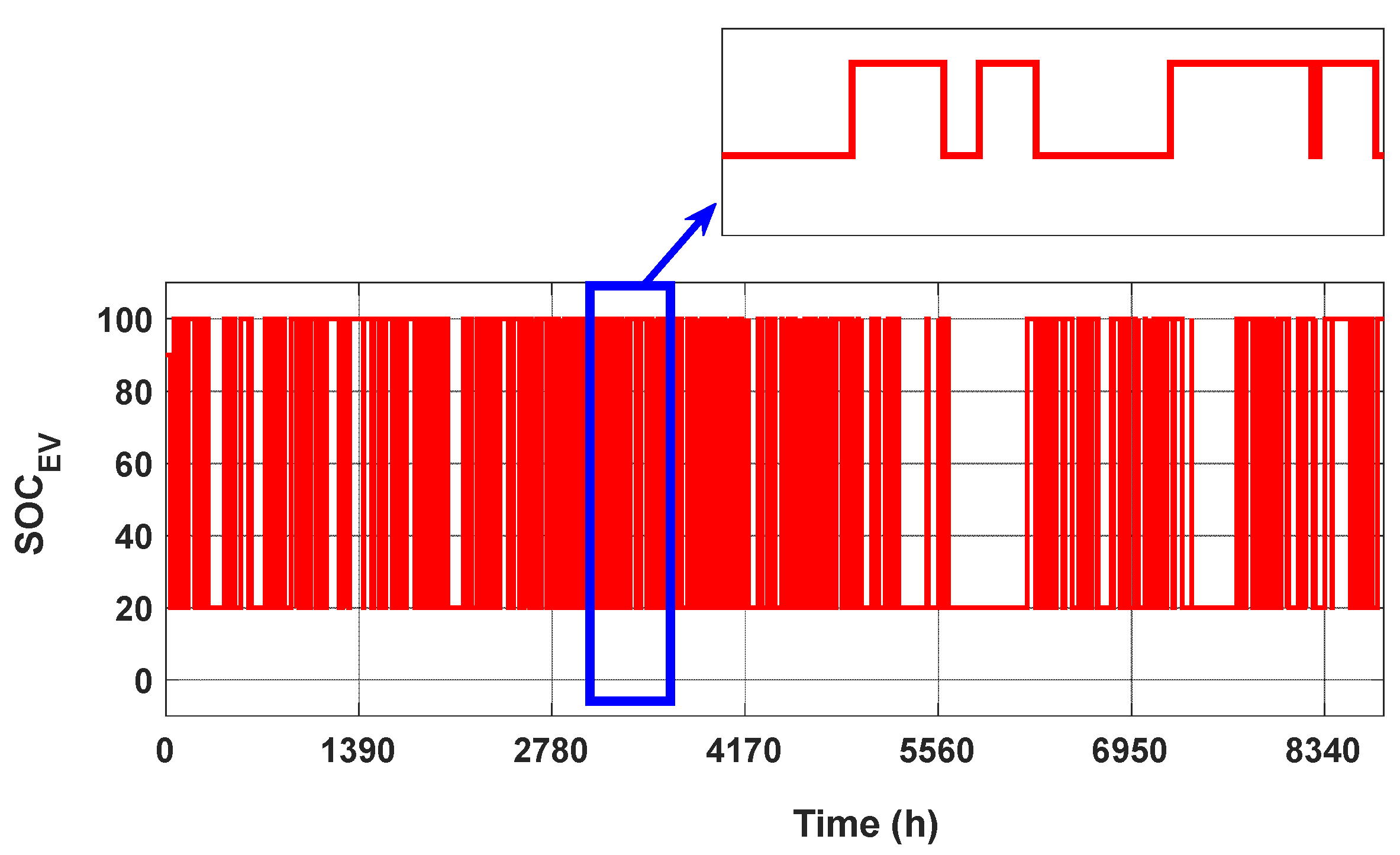
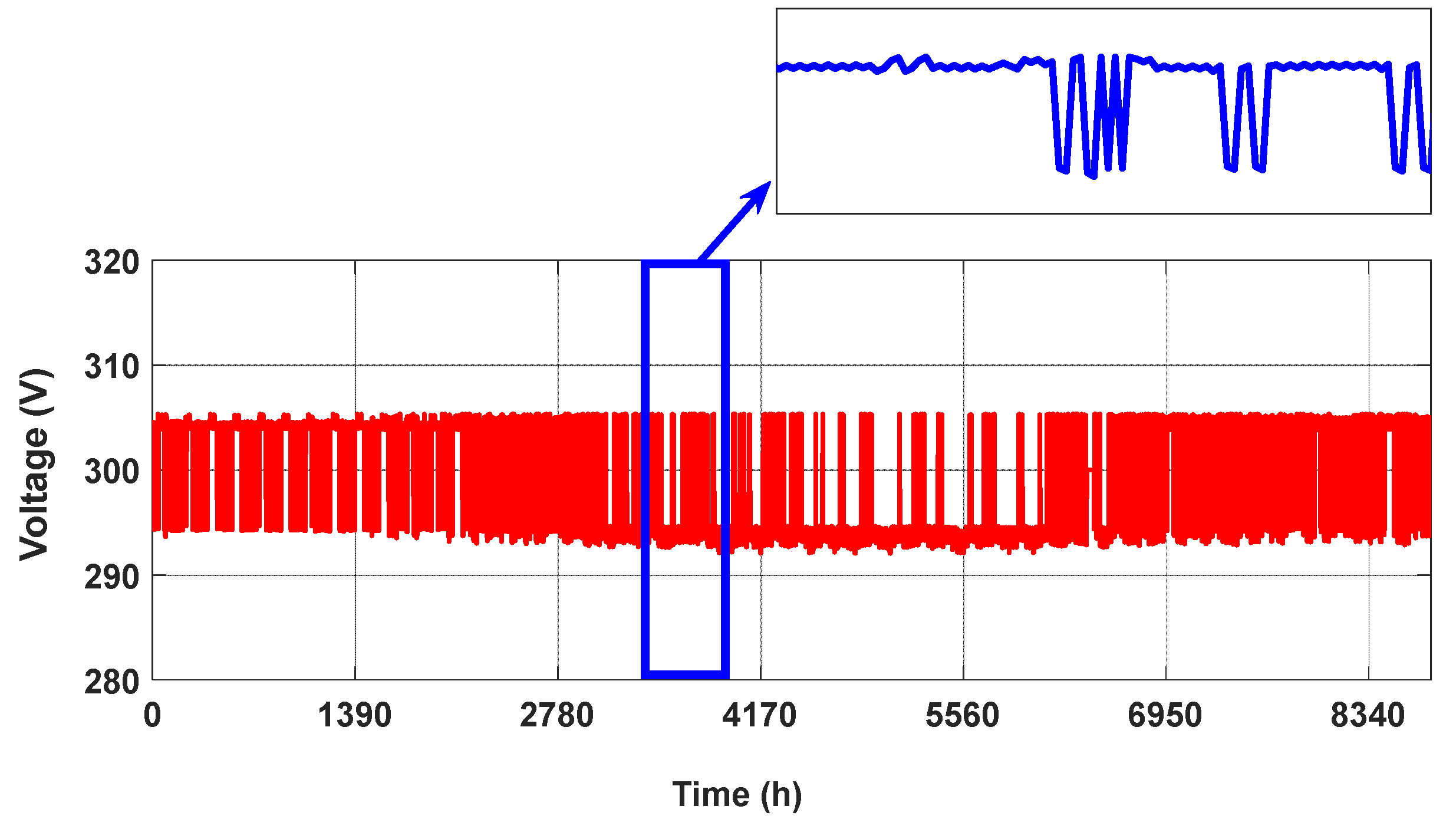
- EVs Power Discharging Mode: In scenarios where the available power from RES is insufficient to meet the HMG load requirements, the system operates in this mode. Here, the EVs battery are utilized to regulate the output voltage through battery discharge, serving as voltage sources. The goal of the controller is to enable precise energy sharing and optimal voltage regulation within an acceptable threshold to reduce dependence on upstream power received from the AC grid.
- Idle Power Mode: This mode signifies a state of equilibrium where the HMG system operates independently in an islanded mode, with the DFIG and PV systems being adequate to meet the demands. In this mode, EV batteries are not involved in the energy management scheme. The RES undertakes the regulation of the HMG bus voltage, utilizing fuzzy tracking control to maintain stability.
- EVs Power Charging Mode: During times of abundance of power from RES, the supply from the DFIG and PV surpasses the connected demands, leading to an increase in energy levels. In such instances, the surplus energy is directed towards charging the EV batteries for later use, which in turn manages the HMG voltage through their charging mechanisms.
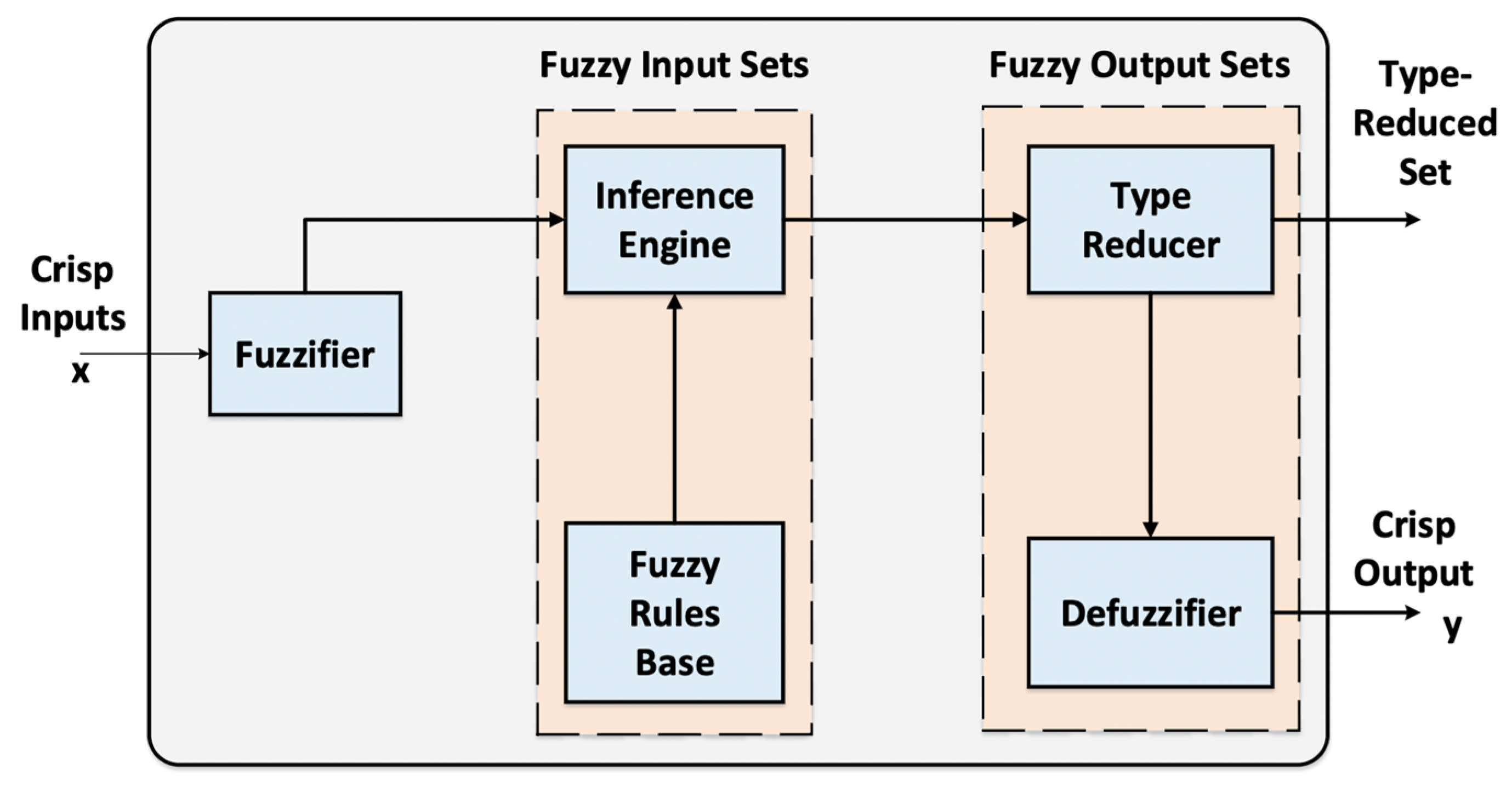
2.2. Design of Intelligent, Variable-Fed, Type-2 FLC for HMG Energy Management
- (a)
- Fuzzifier: the fuzzifier in the IT2FLC transforms crisp input vectors, , into interval type-2 fuzzy sets, fundamentally differing from Type-1 fuzzy logic systems, which employ membership functions defined by precise numbers. In T2FLC, membership functions are characterized by a range of values within [0, 1], reflecting the inherent fuzziness and allowing for the representation of uncertainty directly within the function itself. This characteristic is particularly advantageous in scenarios where system faults or incomplete data compromise the accuracy of membership function mapping. By accommodating uncertainties in input variables, IT2FLC enhances the model’s robustness, making it an effective tool for managing complex systems such as HMGs.
- (b)
- Fuzzy-rule Base: the fuzzy rules within IT2FLC are formulated as linguistic If-Then, statements, comprising multiple antecedents linked to a singular consequent. These rules establish a Type-2 fuzzy relationship among n inputs within the input space and a single output, serving as the foundation for decision-making within the system. The kth rules of Type-2 FLC can be formulated as follows [39]:
- (c)
- Fuzzy-inference Engine: The fuzzy inference engine serves the crucial function of amalgamating fuzzy rules to transform fuzzy inputs into corresponding fuzzy outputs. This input-to-output conversion lays the groundwork for discerning patterns or making informed decisions. Within the engine, a comprehensive database of MFs, along with the defined fuzzy If-Then rules and logical operations, facilitates the systematic evaluation of inputs. The engine executes calculations that include the intersection of antecedents, the aggregation of rule consequents through union operations, and the execution of the extended sup-star composition. In the framework of IT2FLC, each activated (or triggered) rule, denoted as the kth rule, delineates an interval bound by two extremities [40,41]. This range is critical for encapsulating the inherent uncertainties and facilitating a more adaptable output generation. This interval-based approach enriches the system’s capability to navigate through the dynamic and uncertain nature of inputs, as follows:
- (d)
- Type-reducer: Type reduction is tasked with transitioning the Type-2 fuzzy set output into a Type-1 fuzzy one. This step is critical, as it bridges the computational gap between high-dimensional fuzzy logic and the actionable, crisp outputs necessary for real-time energy management decisions for the HMG. Following type reduction, the defuzzification phase further processes the Type-1 fuzzy set, distilling it into a precise, crisp value conducive to practical application. In the context of this study, centroid-type reduction is employed for its efficacy in negotiating the intricate balance between the detailed representation of uncertainty in Type-2 sets and the requisite clarity of Type-1 sets. The centroid, , calculation for a Type-2 fuzzy system embodies a meticulous aggregation of the system’s outputs, thereby providing a comprehensive yet concise representation of the fuzzy logic’s inference outcome, as follows:
- (e)
- Defuzzifer: The predominant method employed for defuzzification involves calculating the centroid of the type-reduced set, a process that ensures the final decision or output retains a balance between the understanding captured by the fuzzy logic and the actionable clarity required for effective control. To achieve this balance, the following expression calculates the centroid of an n-point discretized type-reduced set:
3. Case Study and Results
3.1. Description of the Developed Hybrid Microgrid Simulink Model
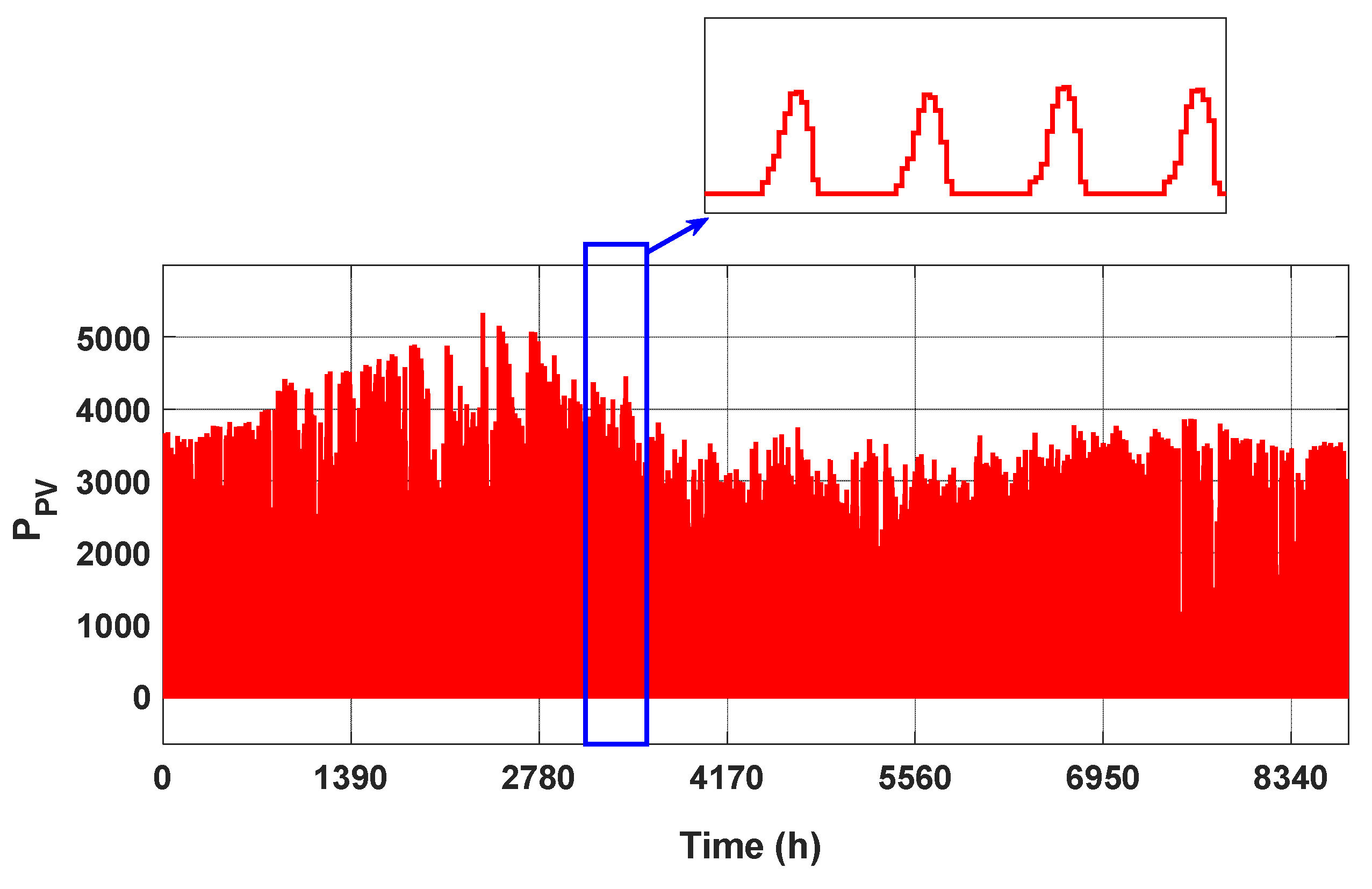
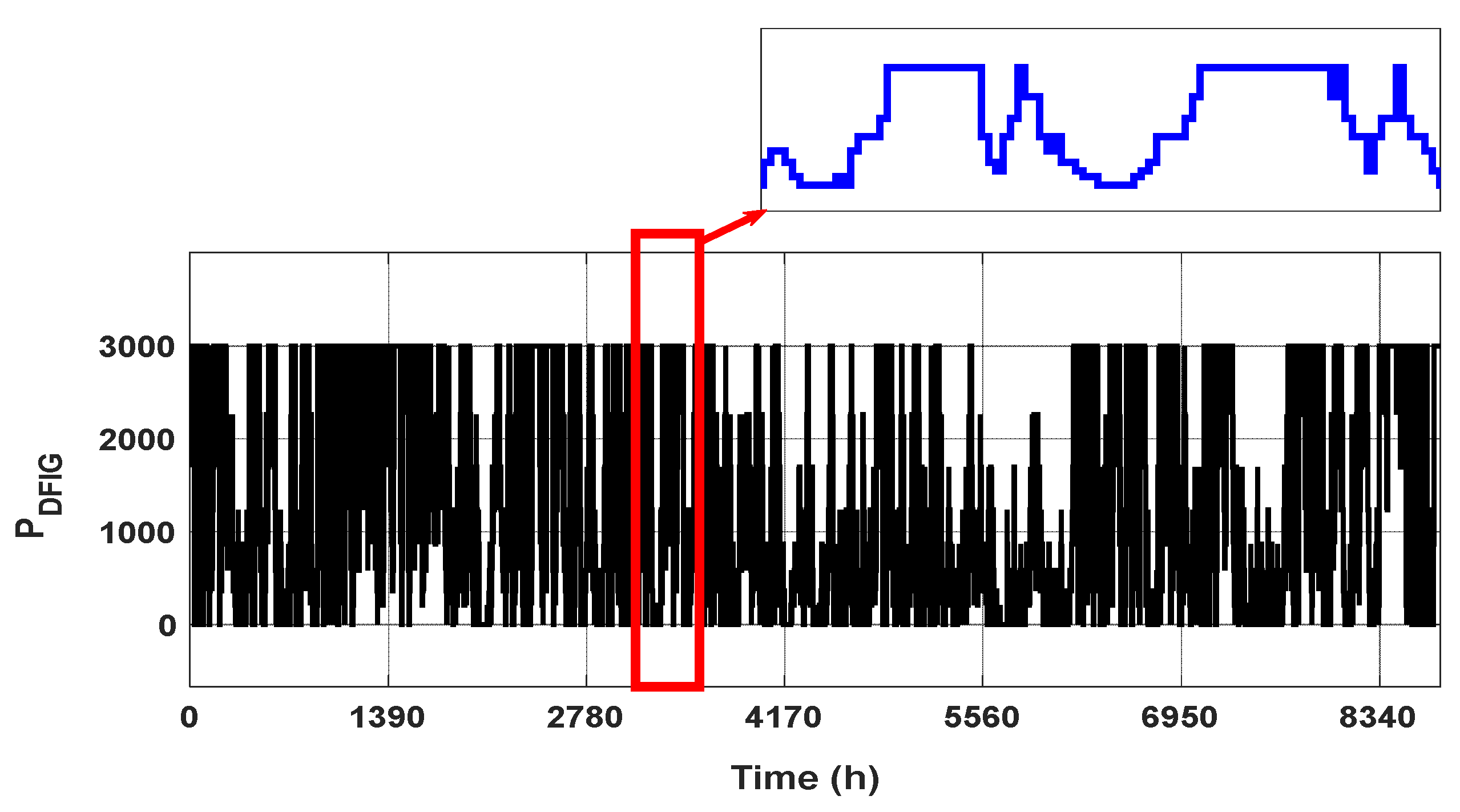
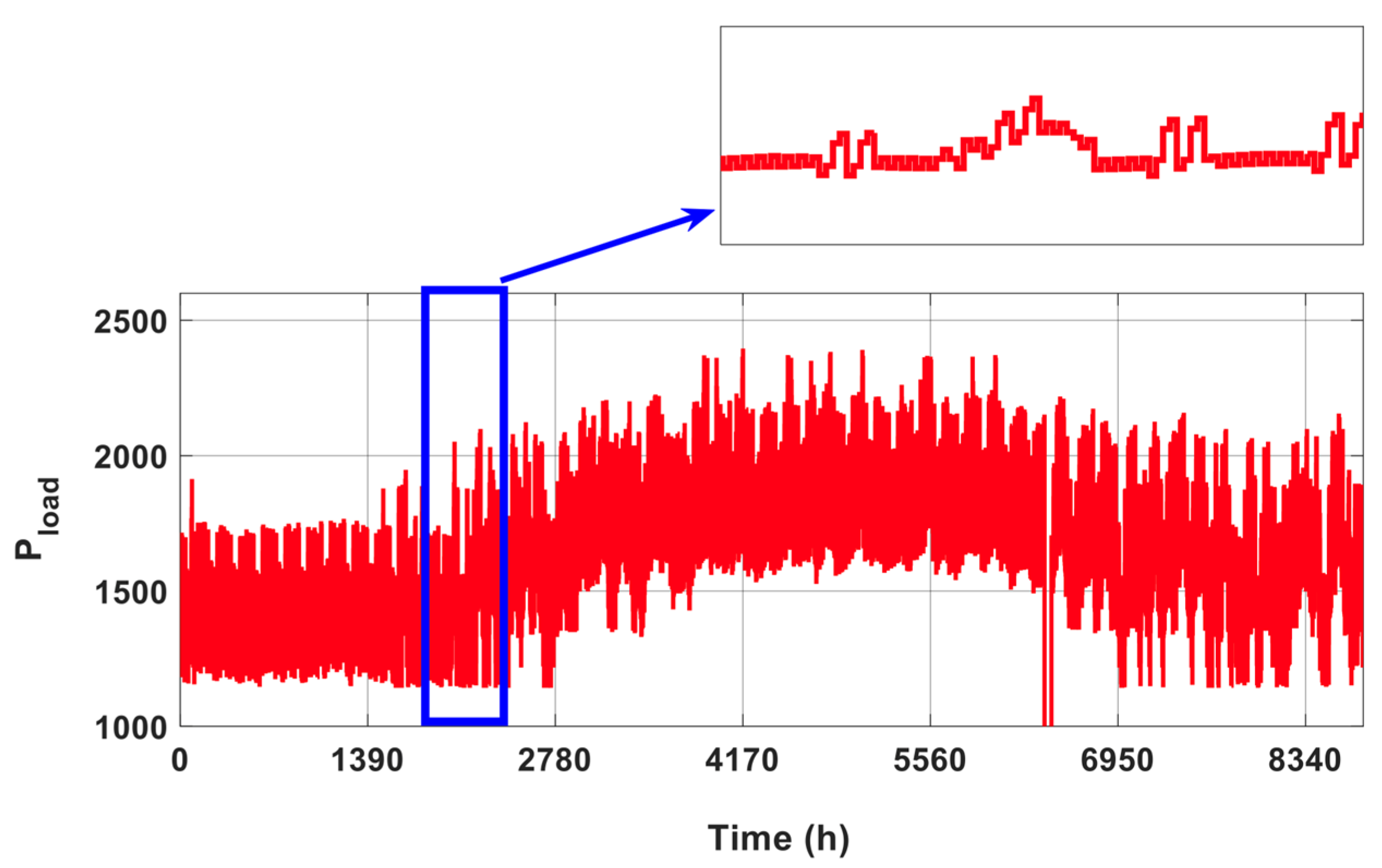
3.2. Input Parameters
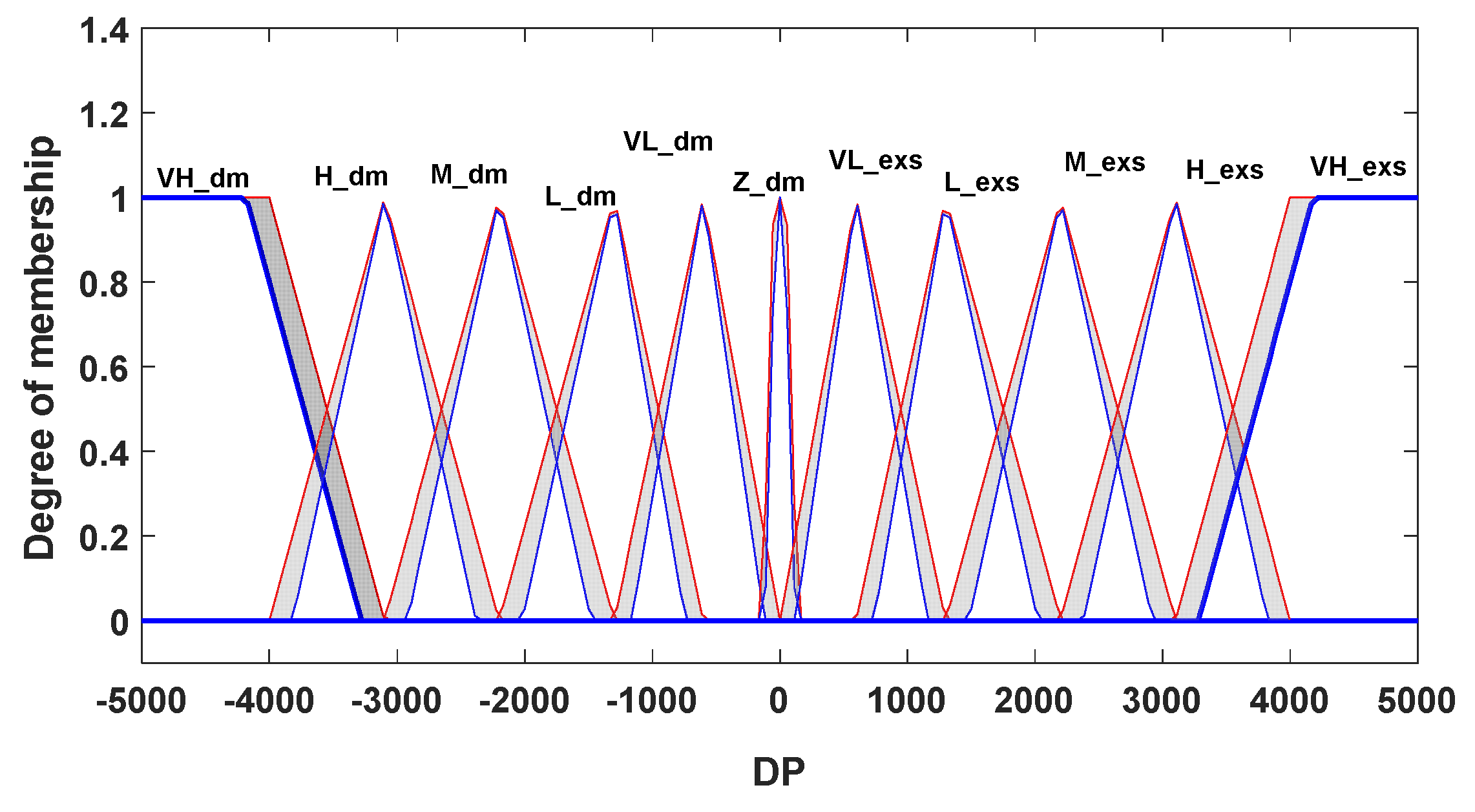
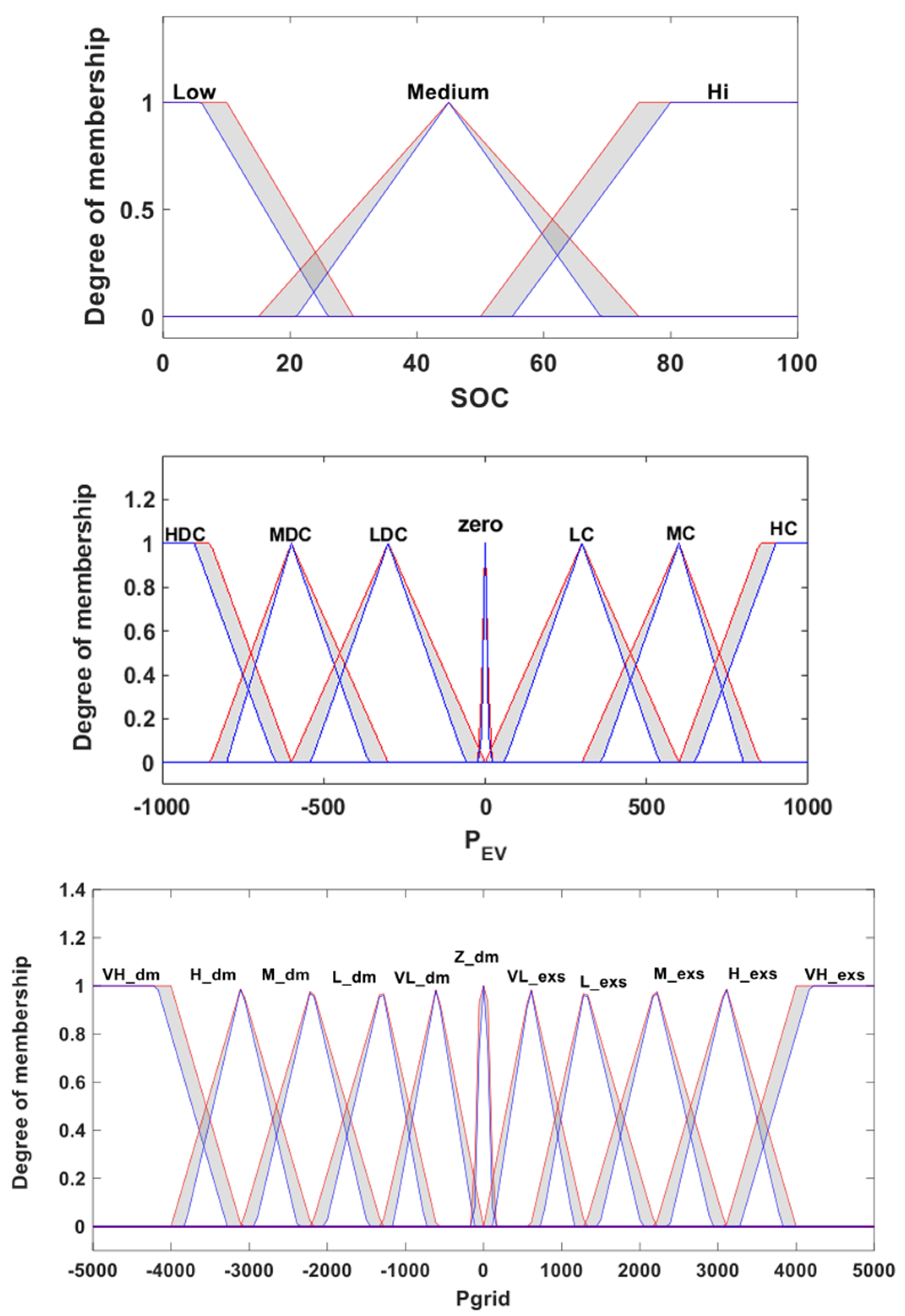
3.3. Fuzzification of the Input
3.4. Fuzzy Rule Base
3.5. Case Study Incorporating Dynamic HMG Operation
4. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Soshinskaya, M.; Crijns-Graus, W.H.; Guerrero, J.M.; Vasquez, J.C. Microgrids: Experiences, barriers and success factors. Renew. Sustain. Energy Rev. 2014, 40, 659–672. [Google Scholar] [CrossRef]
- Kurohane, K.; Senjyu, T.; Uehara, A.; Yona, A.; Funabashi, T.; Kim, C.H. A hybrid smart AC/DC power system. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications, Vigo, Spain, 9–14 July 2010; pp. 764–769. [Google Scholar]
- García Vera, Y.E.; Dufo-López, R.; Bernal-Agustín, J.L. Energy management in microgrids with renewable energy sources: A literature review. Appl. Sci. 2019, 9, 3854. [Google Scholar] [CrossRef]
- Hadley, S.W. Impact of plug-in hybrid vehicles on the electric grid. Ornl Rep. 2006, 640. Available online: https://info.ornl.gov/sites/publications/files/Pub3198.pdf (accessed on 15 December 2022).
- Collins, M.M.; Mader, G.H. The timing of EV recharging and its effect on utilities. IEEE Trans. Veh. Technol. 1983, 32, 90–97. [Google Scholar] [CrossRef]
- Aljohani, T.; Mohamed, M.A.; Mohammed, O. Tri-level hierarchical coordinated control of large-scale EVs charging based on multi-layer optimization framework. Electr. Power Syst. Res. 2024, 226, 109923. [Google Scholar] [CrossRef]
- Casella, V.; Fernandez Valderrama, D.; Ferro, G.; Minciardi, R.; Paolucci, M.; Parodi, L.; Robba, M. Towards the integration of sustainable transportation and smart grids: A review on electric vehicles’ management. Energies 2022, 15, 4020. [Google Scholar] [CrossRef]
- Aljohani, T.; Mohammed, O. Modeling the Impact of the Vehicle-to-Grid Services on the Hourly Operation of the Power Distribution Grid. Designs 2018, 2, 55. [Google Scholar] [CrossRef]
- Hajimiragha, A.H.; Canizares, C.A.; Fowler, M.W.; Moazeni, S.; Elkamel, A. A robust optimization approach for planning the transition to plug-in hybrid electric vehicles. IEEE Trans. Power Syst. 2011, 26, 2264–2274. [Google Scholar] [CrossRef]
- Almutairi, A.; Aljohani, T.M. Reliability-driven time-of-use tariffs for efficient plug-in electric vehicle integration. Sustain. Cities Soc. 2024, 107, 105463. [Google Scholar] [CrossRef]
- Aljohani, T.M.; Ebrahim, A.F.; Mohammed, O.A. Dynamic real-time pricing mechanism for electric vehicles charging considering optimal microgrids energy management system. IEEE Trans. Ind. Appl. 2021, 57, 5372–5381. [Google Scholar] [CrossRef]
- Pourmousavi, S.A.; Nehrir, M.H.; Colson, C.M.; Wang, C. Real-time energy management of a stand-alone hybrid wind-microturbine energy system using particle swarm optimization. IEEE Trans. Sustain. Energy 2010, 1, 193–201. [Google Scholar] [CrossRef]
- Elazab, R.; Abdelnaby, A.T.; Keshta, H.E.; Ali, A.A. Optimal techno-economic feasibility analysis of a grid-tied microgrid considering demand response strategy. Electr. Power Syst. Res. 2023, 224, 109768. [Google Scholar] [CrossRef]
- Ullah, Z.; Wang, S.; Lai, J.; Azam, M.; Badshah, F.; Wu, G.; Elkadeem, M.R. Implementation of various control methods for the efficient energy management in hybrid microgrid system. Ain Shams Eng. J. 2023, 14, 101961. [Google Scholar] [CrossRef]
- Aljohani, T.M.; Ebrahim, A.F.; Mohammed, O. Hybrid microgrid energy management and control based on metaheuristic-driven vector-decoupled algorithm considering intermittent renewable sources and electric vehicles charging lot. Energies 2020, 13, 3423. [Google Scholar] [CrossRef]
- Arcos-Aviles, D.; Pascual, J.; Marroyo, L. Fuzzy logic-based energy management system design for residential grid-connected microgrids. EEE Trans. Smart Grid 2016, 9, 530–543. [Google Scholar] [CrossRef]
- Bhatti, A.R.; Salam, Z. A rule-based energy management scheme for uninterrupted electric vehicles charging at constant price using photovoltaic-grid system. Renew. Energy 2018, 125, 384–400. [Google Scholar] [CrossRef]
- Attou, N.; Zidi, S.A.; Khatir, M.; Hadjeri, S. Energy Management System for Hybrid Microgrids. Electroteh. Electron. Autom. 2021, 69, 21–30. [Google Scholar] [CrossRef]
- Cao, B.; Dong, W.; Lv, Z.; Gu, Y.; Singh, S.; Kumar, P. Hybrid microgrid many-objective sizing optimization with fuzzy decision. IEEE Trans. Fuzzy Syst. 2020, 28, 2702–2710. [Google Scholar] [CrossRef]
- Sumarmad KA, A.; Sulaiman, N.; Wahab, N.I.A.; Hizam, H. Microgrid energy management system based on fuzzy logic and monitoring platform for data analysis. Energies 2022, 15, 4125. [Google Scholar] [CrossRef]
- Sepehrzad, R.; Moridi, A.R.; Hassanzadeh, M.E.; Seifi, A.R. Intelligent energy management and multi-objective power distribution control in hybrid micro-grids based on the advanced fuzzy-PSO method. ISA Trans. 2021, 112, 199–213. [Google Scholar] [CrossRef]
- Zhong, Z. Modeling, Control, Estimation, and Optimization for Microgrids: A Fuzzy-Model-Based Method; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Hettiarachchi, H.W.D.; Hemapala, K.U.; Jayasekara, A.B.P. Review of applications of fuzzy logic in multi-agent-based control system of AC-DC hybrid microgrid. IEEE Access 2018, 7, 1284–1299. [Google Scholar] [CrossRef]
- Abraham, D.S.; Chandrasekar, B.; Rajamanickam, N.; Vishnuram, P.; Ramakrishnan, V.; Bajaj, M.; Piecha, M.; Blazek, V.; Prokop, L. Fuzzy-based efficient control of DC microgrid configuration for PV-energized EV charging station. Energies 2023, 16, 2753. [Google Scholar] [CrossRef]
- Cheng, C.H. Implementation of a small type DC microgrid based on fuzzy control and dynamic programming. Energies 2016, 9, 781. [Google Scholar] [CrossRef]
- Al-Sakkaf, S.; Kassas, M.; Khalid, M.; Abido, M.A. An energy management system for residential autonomous DC microgrid using optimized fuzzy logic controller considering economic dispatch. Energies 2019, 12, 1457. [Google Scholar] [CrossRef]
- Sahu, P.C.; Mishra, S.; Prusty, R.C.; Panda, S. Improved-salp swarm optimized type-II fuzzy controller in load frequency control of multi area islanded AC microgrid. Sustain. Energy Grids Netw. 2018, 16, 380–392. [Google Scholar] [CrossRef]
- Awad, H.; Ibrahim, A.M.; De Santis, M.; Bayoumi, E.H. Unity power factor operation in microgrid applications using fuzzy type 2 nested controllers. Appl. Sci. 2023, 13, 5537. [Google Scholar] [CrossRef]
- Janarthanan, R.; Maheshwari, R.U.; Shukla, P.K.; Shukla, P.K.; Mirjalili, S.; Kumar, M. Intelligent detection of the PV faults based on artificial neural network and type 2 fuzzy systems. Energies 2021, 14, 6584. [Google Scholar] [CrossRef]
- Abdulkhader, H.K.; Jacob, J.; Mathew, A.T. Robust type-2 fuzzy fractional order PID controller for dynamic stability enhancement of power system having RES based microgrid penetration. Int. J. Electr. Power Energy Syst. 2019, 110, 357–371. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Kayacan, E. A novel fractional-order type-2 fuzzy control method for online frequency regulation in ac microgrid. Eng. Appl. Artif. Intell. 2020, 90, 103483. [Google Scholar] [CrossRef]
- Sabahi, K.; Tavan, M.; Hajizadeh, A. Adaptive type-2 fuzzy PID controller for LFC in AC microgrid. Soft Comput. 2021, 25, 7423–7434. [Google Scholar] [CrossRef]
- Khooban, M.H.; Gheisarnejad, M. A novel deep reinforcement learning controller based type-II fuzzy system: Frequency regulation in microgrids. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 5, 689–699. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Sabzalian, M.H.; Ahmadian, A.; Nabipour, N. A dynamic general type-2 fuzzy system with optimized secondary membership for online frequency regulation. ISA Trans. 2021, 112, 150–160. [Google Scholar] [CrossRef]
- Ahmad, S.; Mekhilef, S.; Mokhlis, H.; Karimi, M.; Pourdaryaei, A.; Ahmed, T.; Jhuma, U.K.; Afzal, S. Fuzzy logic-based direct power control method for pv inverter of grid-tied ac microgrid without phase-locked loop. Electronics 2021, 10, 3095. [Google Scholar] [CrossRef]
- Cantillo-Luna, S.; Moreno-Chuquen, R.; Gonzalez-Longatt, F.; Chamorro, H.R. A type-2 fuzzy controller to enable the EFR service from a battery energy storage system. Energies 2022, 15, 2389. [Google Scholar] [CrossRef]
- Mosayebi, M.; Gheisarnejad, M.; Khooban, M.H. An intelligent type-2 fuzzy stabilization of multi-DC nano power grids. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 5, 854–859. [Google Scholar] [CrossRef]
- Aluko, A.; Buraimoh, E.; Oni, O.E.; Davidson, I.E. Advanced distributed cooperative secondary control of Islanded DC Microgrids. Energies 2022, 15, 3988. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P.; Kacprzyk, J.; Pedrycz, W. Type-2 fuzzy logic: Theory and applications. In Proceedings of the 2007 IEEE International Conference on Granular Computing (GRC 2007), San Jose, CA, USA, 2–4 November 2007; p. 145. [Google Scholar]
- Liang, Q.; Mendel, J.M. Interval type-2 fuzzy logic systems: Theory and design. IEEE Trans. Fuzzy Syst. 2000, 8, 535–550. [Google Scholar] [CrossRef]
- Mendel, J.M. Working with Type-2 Fuzzy Sets. In Explainable Uncertain Rule-Based Fuzzy Systems; Springer International Publishing: Cham, Switzerland, 2024; pp. 281–339. [Google Scholar]
- London Datastore. Photovoltaic (PV) Solar Panel Energy Generation Data. Available online: https://data.london.gov.uk/dataset/photovoltaic--pv--solar-panel-energy-generation-data (accessed on 11 December 2023).
- Food and Agriculture Organization of the United Nations. Copernicus Climate Change Service. Wind Speed. [Dataset]. Available online: https://data.apps.fao.org/catalog/iso/a2ccd767-f729-4b43-80bb-ce73cb467b99 (accessed on 11 December 2023).
- Open Power System Data. Household Data. Available online: https://data.open-power-system-data.org/household_data/ (accessed on 29 November 2023).
- Aljohani, T.M. Cyberattacks on Energy Infrastructures as Modern War Weapons—Part I: Analysis and Motives. IEEE Technol. Soc. Mag. 2024, 43, 3395688. [Google Scholar] [CrossRef]
- Aljohani, T.M. Cyberattacks on Energy Infrastructures as Modern War Weapons—Part II: Gaps, Standardization, and Mitigation Measures. IEEE Technol. Soc. Mag. 2024, 43, 3395697. [Google Scholar] [CrossRef]
- Aljohani, T.M.; Almutairi, A. Modeling time-varying wide-scale distributed denial of service attacks on electric vehicle charging stations. Ain Shams Eng. J. 2024, 15, 102860. [Google Scholar] [CrossRef]
- Ahmad, W.; Qureshi, M.B.; Khan, M.M.; Fayyaz, M.A.; Nawaz, R. Optimizing large-scale PV systems with machine learning: A neuro-fuzzy MPPT control for PSCs with uncertainties. Electronics 2023, 12, 1720. [Google Scholar] [CrossRef]
- Al Smadi, T.; Handam, A.; Gaeid, K.S.; Al-Smadi, A.; Al-Husban, Y. Artificial intelligent control of energy management PV system. Results Control Optim. 2024, 14, 100343. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DP | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| EV SOC | Output | VHdim | Hdm | Mdm | Ldm | VLdm | Zdm | VLexs | Lexs | Mexs | Hexs | VHexs | |
| Low | PEV | Zero | Zero | Zero | Zero | Zero | Zero | MC | HC | HC | HC | HC | |
| Pgrid | VHdm | Hdm | Mdm | Ldm | VLdm | Zdm | Zdm | VLexs | Lexs | Mexs | Hexs | ||
| Medium | PEV | MDC | Zero | MDC | MDC | MDC | Zero | MC | HC | HC | HC | HC | |
| Pgrid | Hdm | VHdm | Ldm | VLdm | Zdm | Zdm | Zdm | VLexs | Lexs | Mexs | Hexs | ||
| Hi | PEV | HDC | HDC | LDC | HDC | MDC | Zero | Zero | Zero | Zero | Zero | Zero | |
| Pgrid | Hdm | Mdm | Ldm | VLdm | Zdm | Zdm | VLexs | Lexs | Mexs | Hexs | VHexs | ||
| Parameter | Hours On | Power (kW) | Energy (MWh) |
|---|---|---|---|
| Unit | |||
| Grid to Microgrid | 4611 | 8009.5 | 18,759 |
| Microgrid to Grid | 3647 | 5408.4 | 31,178 |
| Net Energy Exchange | - | 2599 imported from grid | 12,463 imported from grid |
| Economical Saving (Considering the cost of 0.27 USD/kWh) | - | - | −3,748,900 USD (To be paid to the utility grid) |
| Cost Saving Compared with CLFCs | - | - | −3,030,638.64 USD |
| EV Charging | 365 | 152.22 | 53.53 |
| EV Discharging | 339 | 142.22 | 46.79 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aljohani, T. Intelligent Type-2 Fuzzy Logic Controller for Hybrid Microgrid Energy Management with Different Modes of EVs Integration. Energies 2024, 17, 2949. https://doi.org/10.3390/en17122949
Aljohani T. Intelligent Type-2 Fuzzy Logic Controller for Hybrid Microgrid Energy Management with Different Modes of EVs Integration. Energies. 2024; 17(12):2949. https://doi.org/10.3390/en17122949
Chicago/Turabian StyleAljohani, Tawfiq. 2024. "Intelligent Type-2 Fuzzy Logic Controller for Hybrid Microgrid Energy Management with Different Modes of EVs Integration" Energies 17, no. 12: 2949. https://doi.org/10.3390/en17122949