
Bi-Level Planning of Electric Vehicle Charging Stations Considering Spatial–Temporal Distribution Characteristics of Charging Loads in Uncertain Environments


Abstract
1. Introduction
2. EV Charging Load Prediction
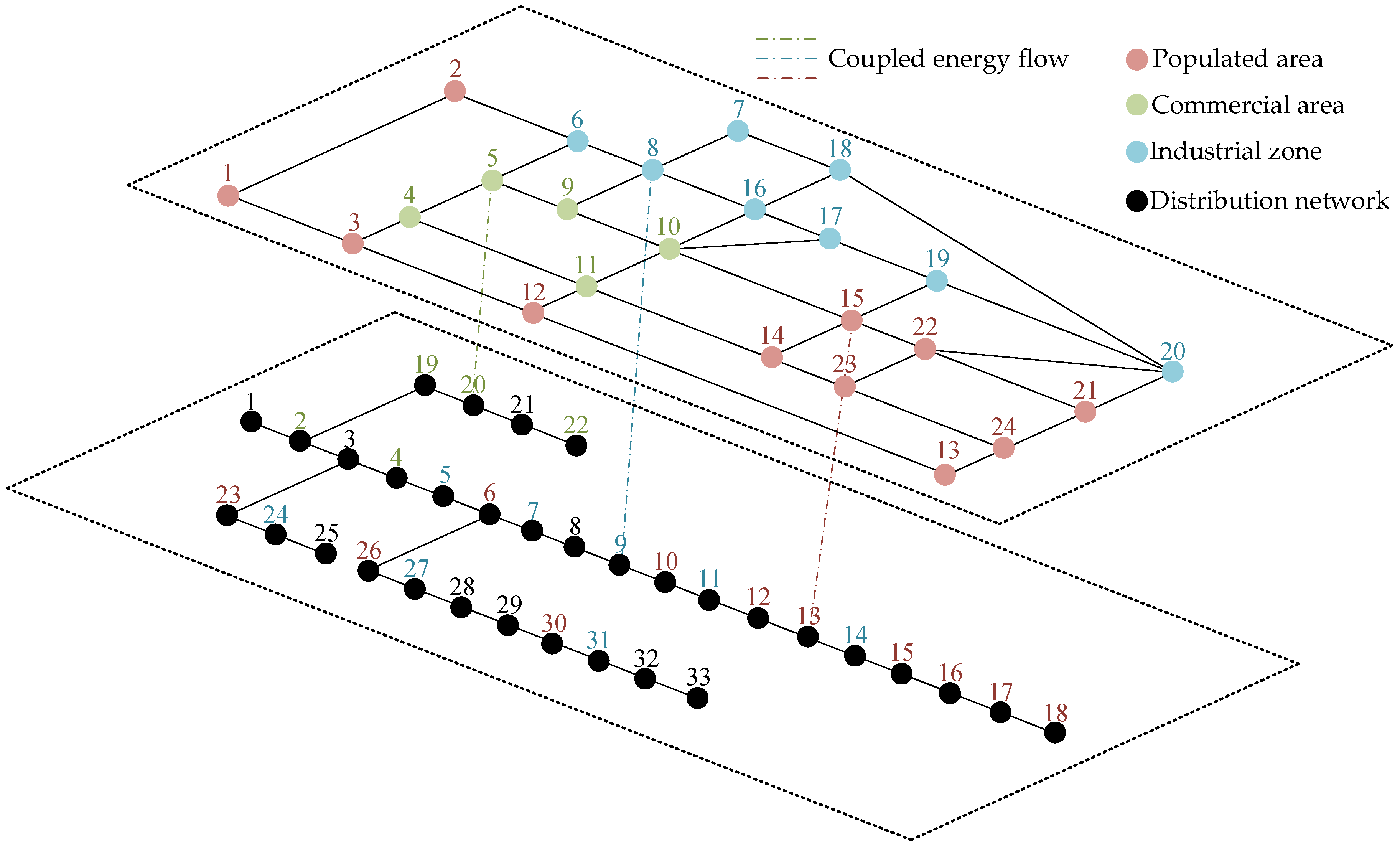
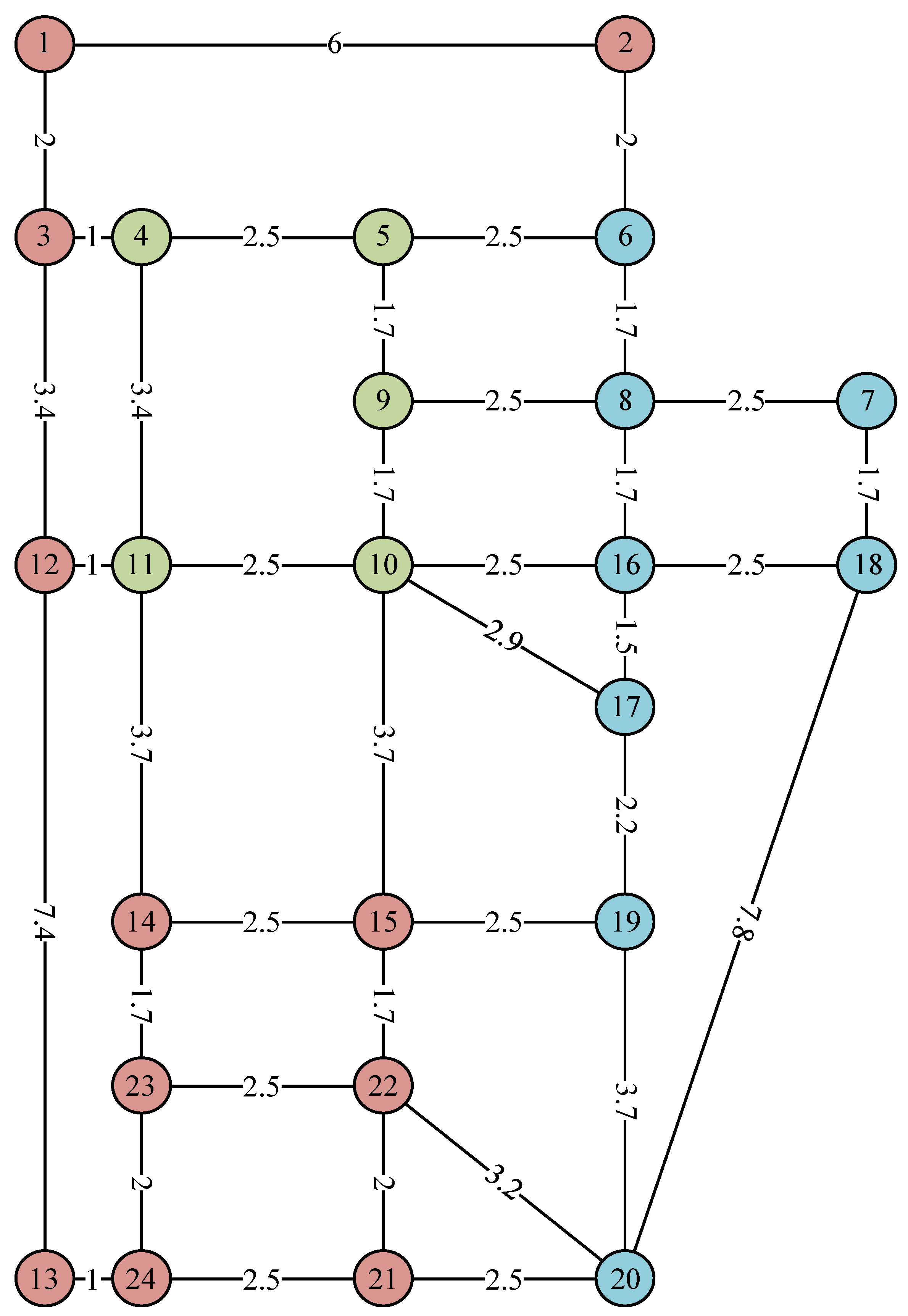
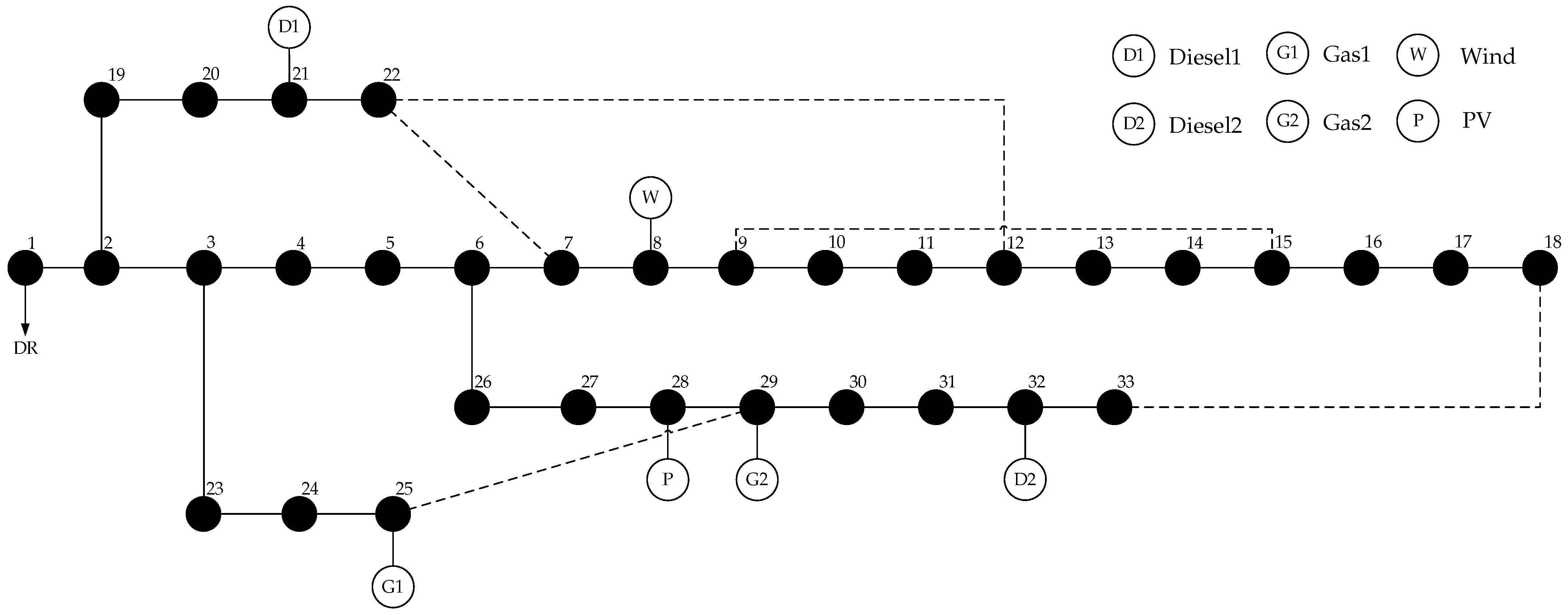
2.1. Coupling of the Road Network to the Distribution Network
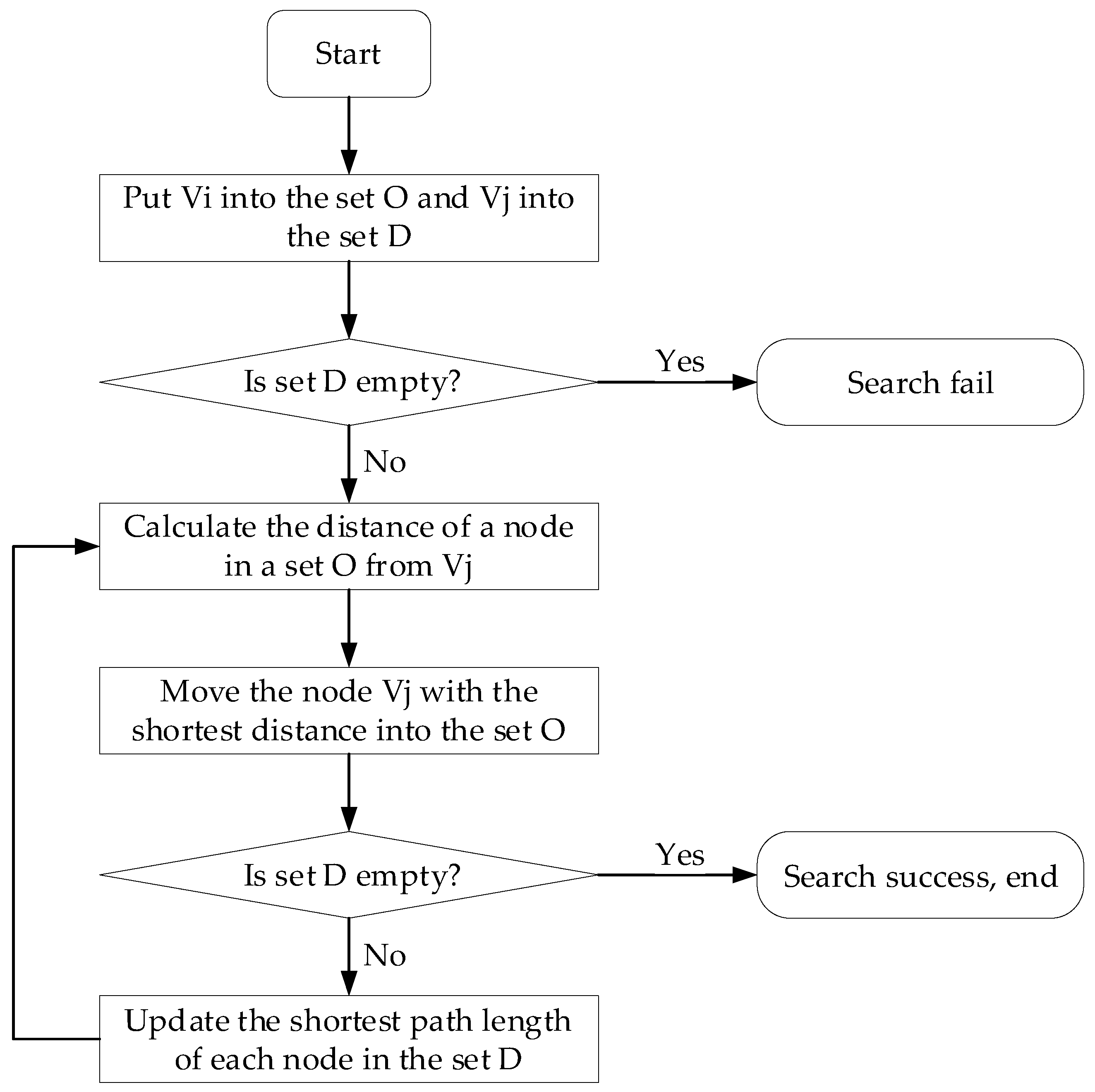
2.2. OD Matrix and Dijkstra’s Shortest Path Algorithm
2.3. Travel Chain Model
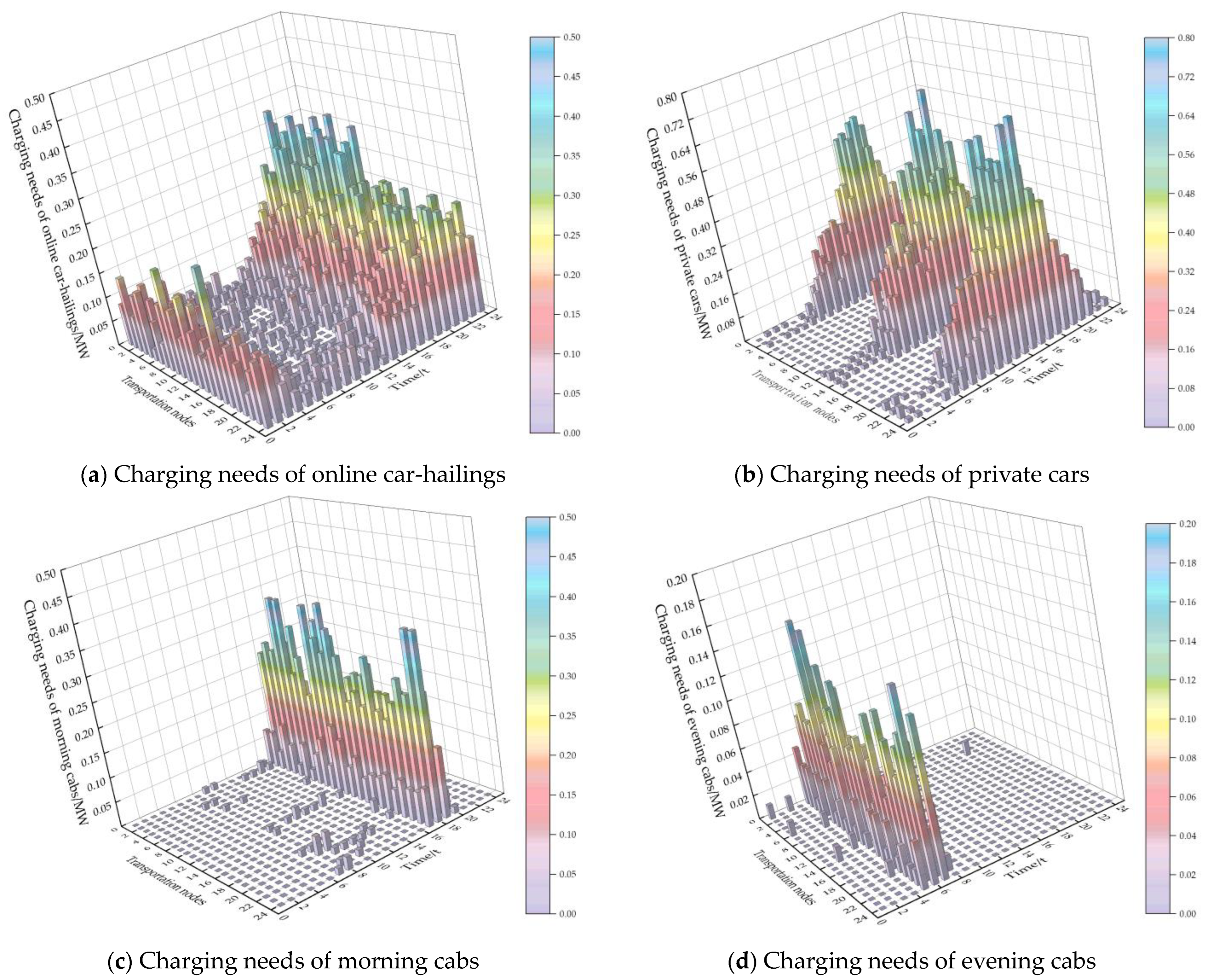
2.4. EV Charging Load Prediction Considering Spatial–Temporal Distribution
3. A Bi-Level Model for Charging Station Siting and Capacity Determination
3.1. Upper-Level Charging Station Planning Model
3.1.1. Upper-Level Objective Function
- (1)
- Annualized cost of the charging station
- (a)
- Annual construction cost
- (b)
- Annual operation and maintenance cost
- (2)
- User’s annualized economic loss
- (c)
- Cost of time lost on the way to the charging station
- (d)
- Cost of driving empty on the way to the charging station
3.1.2. Upper-Level Constraints
- (1)
- Number of Charging Stations Constraint
- (2)
- Charging demand constraint
- (3)
- Charging station distance constraint
- (4)
- Regional charging pile number constraint
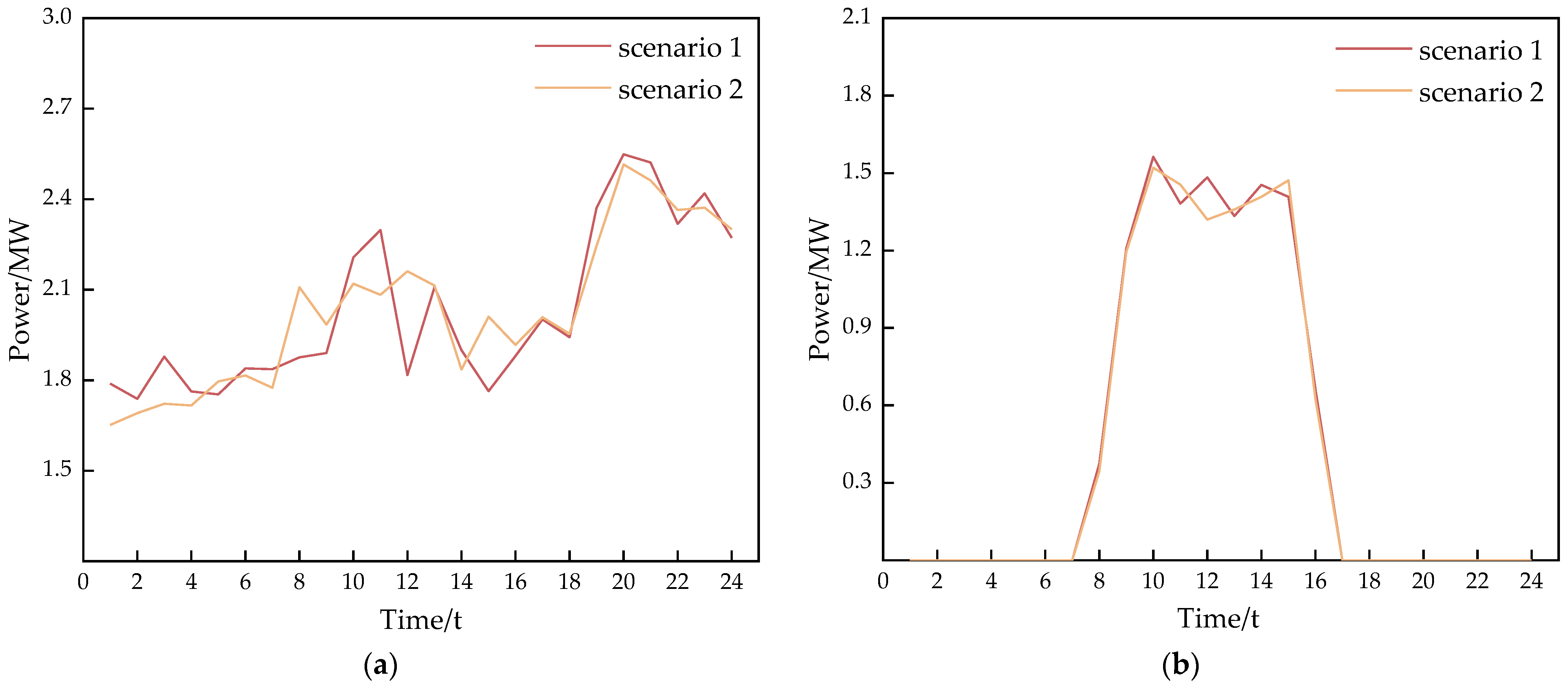
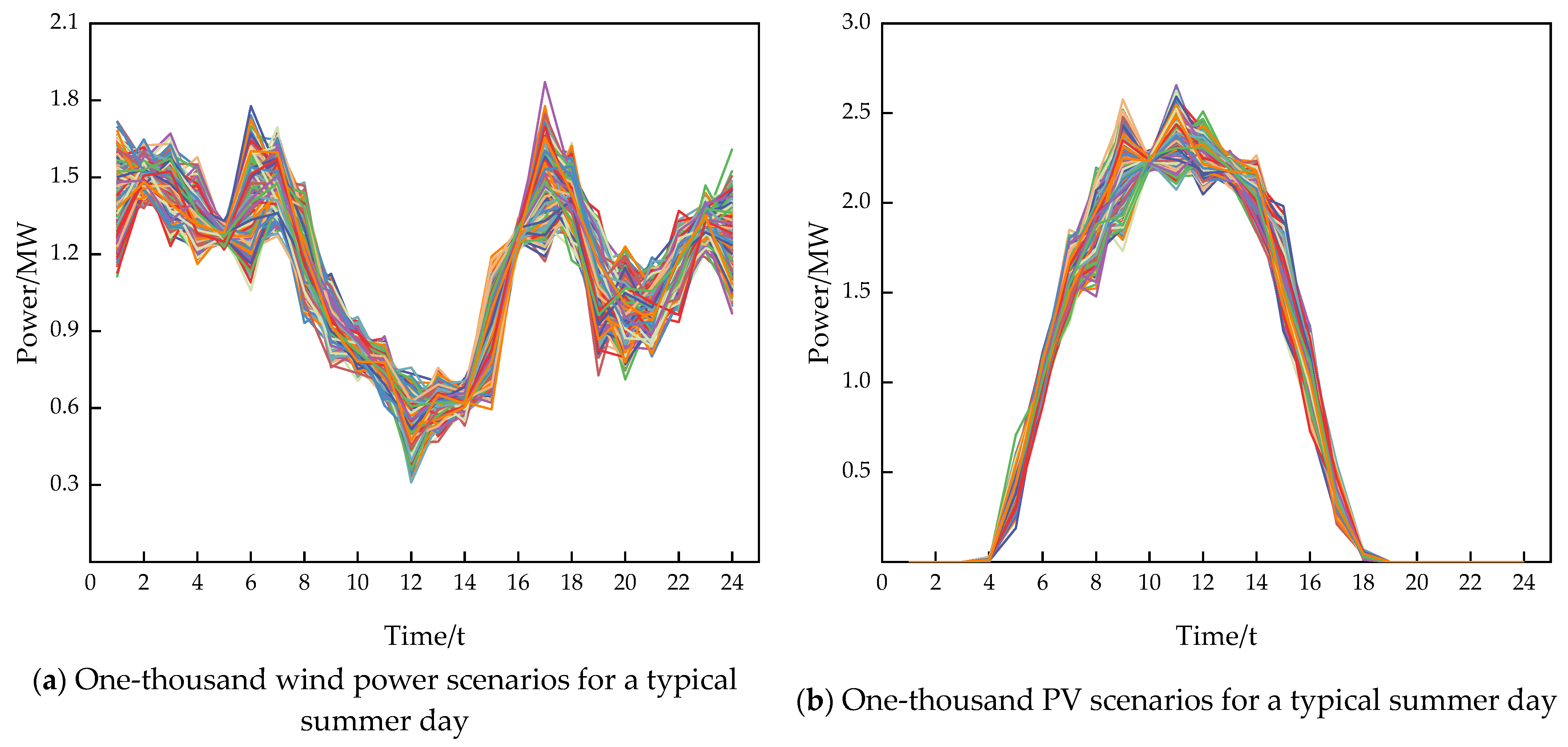
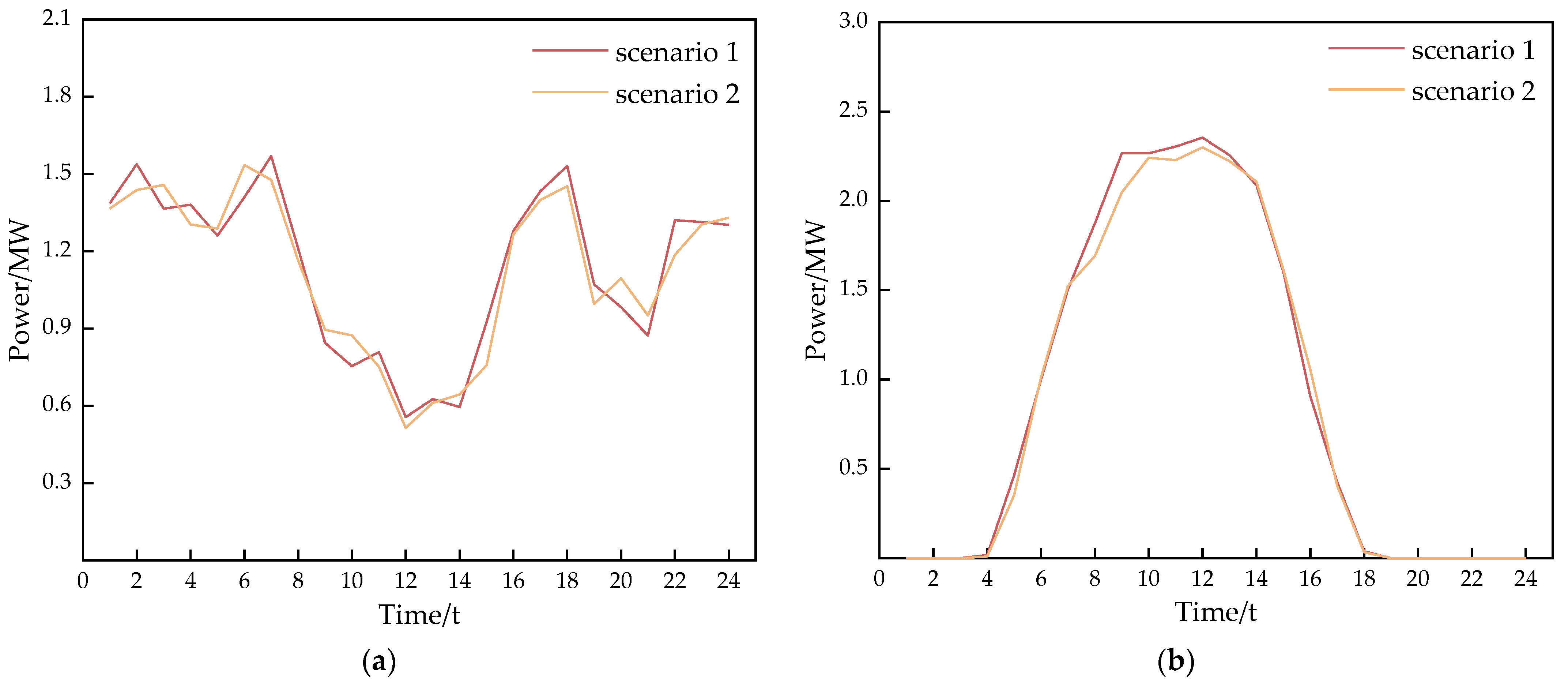
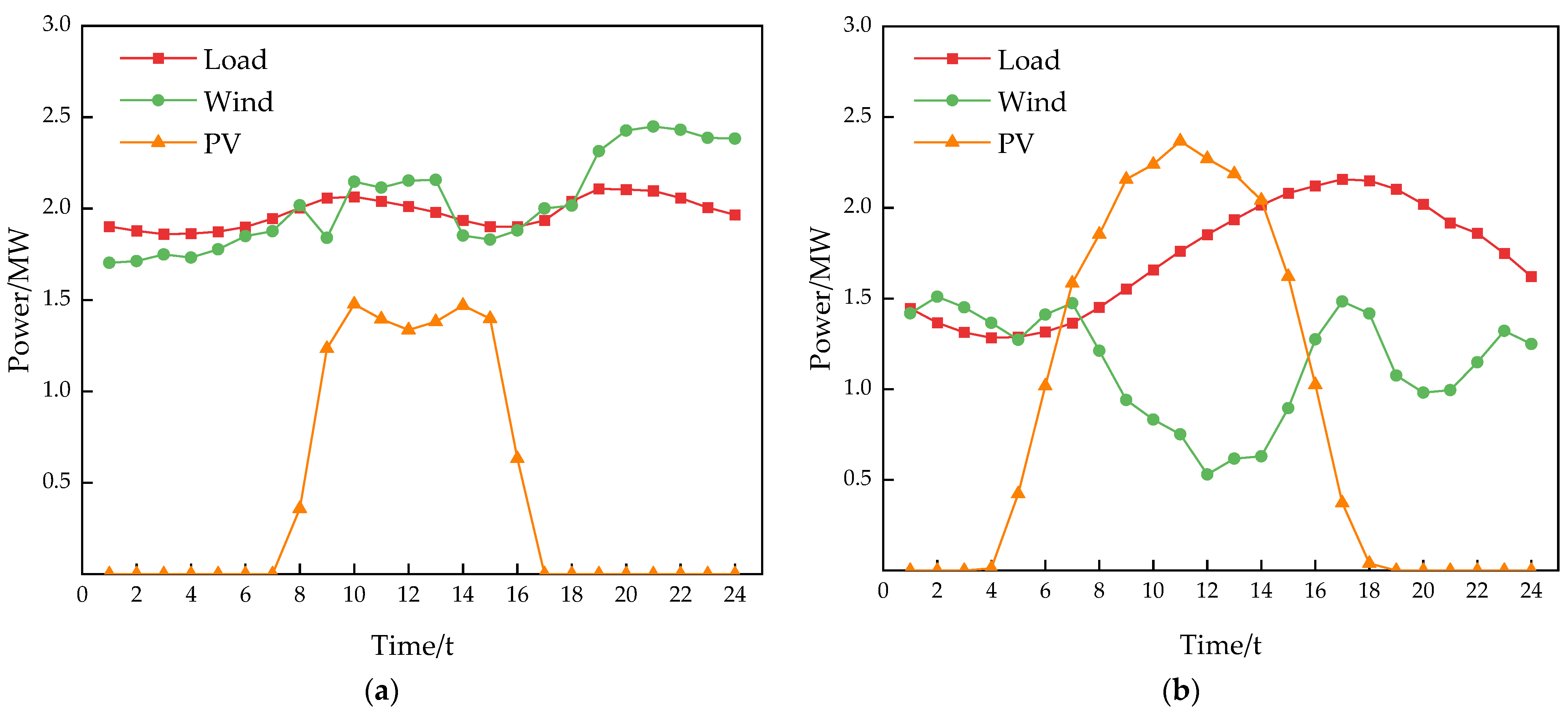
3.2. Uncertainty Handling in Wind and PV
3.3. Lower Distribution Network Operation Model
3.3.1. Lower-Level Objective Function
- (1)
- Gas turbine generation cost
- (2)
- Diesel unit generation cost
- (3)
- Wind and PV grid connection costs
- (4)
- Wind and PV curtailment costs
- (5)
- DR cost
- (6)
- Power purchase and sale costs
- (7)
- Carbon emission cost
3.3.2. Lower-Level Constraints
- (1)
- Gas turbine output constraint
- (2)
- Gas turbine climb constraint
- (3)
- Diesel unit output constraint
- (4)
- Diesel unit climb constraint
- (5)
- Wind and photovoltaic output constraints
- (6)
- Power purchase and sale constraints
- (7)
- DR constraints
- (8)
- Distribution network power flow constraints
- (9)
- Power balance constraint
4. KKT Conditions for Solving the Bi-Level Model
5. Example Analysis
5.1. Parameter Setting
5.2. Charging Demand Load Forecast Results
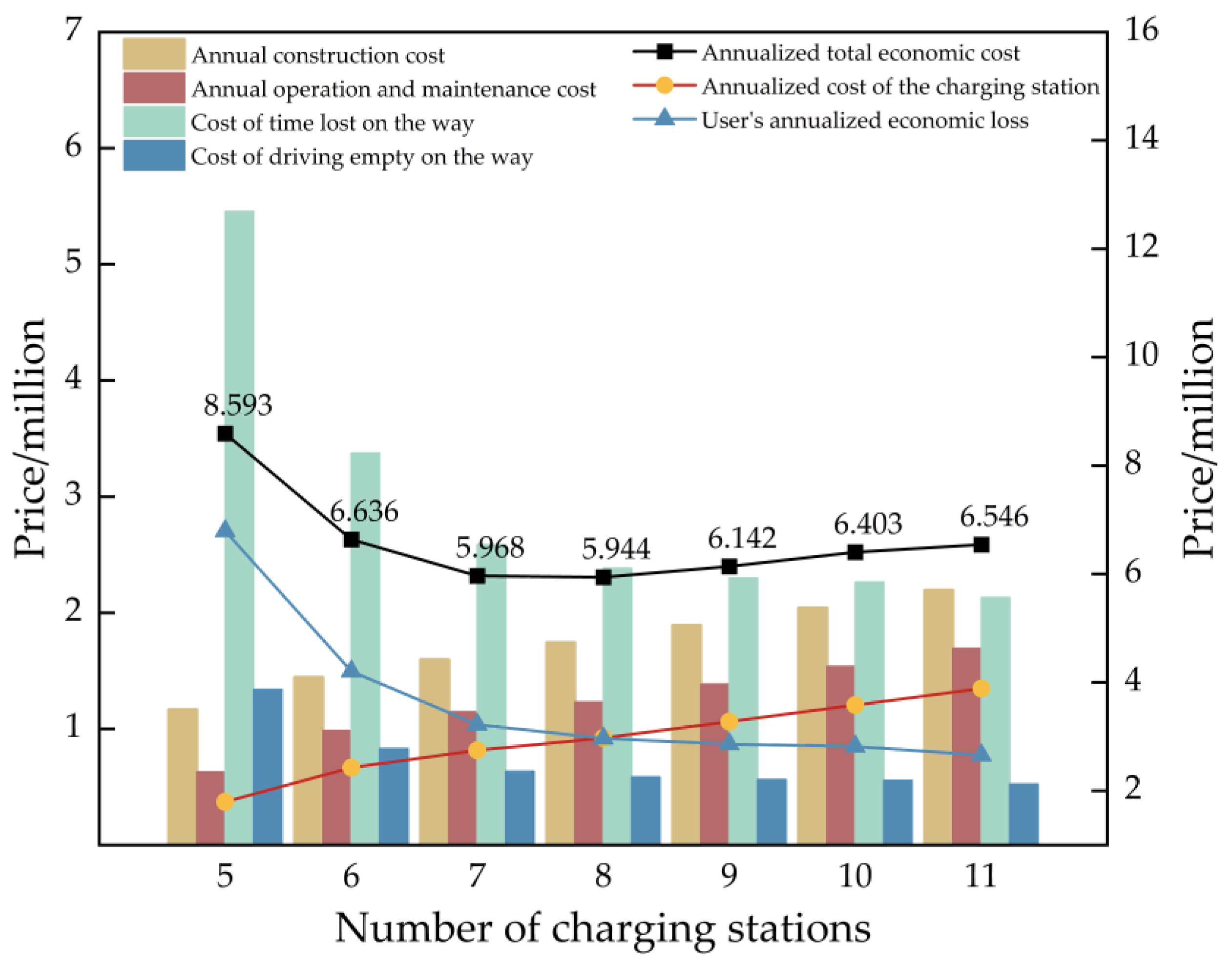
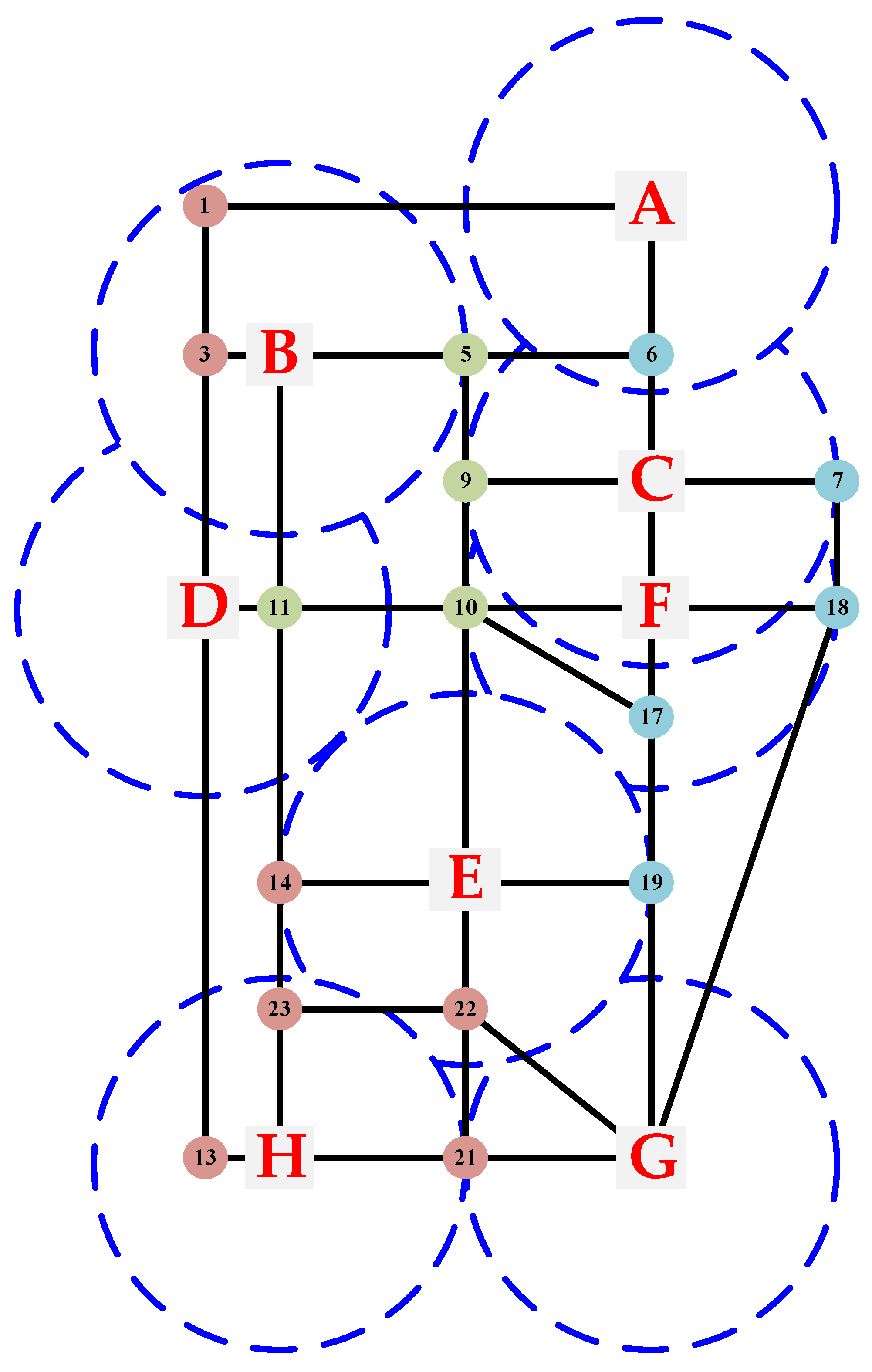
5.3. Results of Charging Station Siting and Capacity Determination
5.4. Distribution Network Operating Results
6. Conclusions
- (1)
- The spatial and temporal distribution of charging load demand in the transportation road network is related to the division of urban functional areas and the charging characteristics of the functional areas, such as the high charging load demand and long charging time in residential areas in general. The validity of the EV charging load prediction model is verified.
- (2)
- By comprehensively considering the interests of both users’ losses and charging station costs, the bi-level planning model is solved to obtain the optimal number of charging stations and the optimal number of charging piles to be included in each charging station, and the number of fast-charging piles and the number of slow-charging piles are subdivided according to the functional areas of the city, which is consistent with the actual demand and can be used for the charging station planning in the city.
- (3)
- By analyzing and comparing the effects on the overall carbon emissions, and wind and PV curtailment rate, in the distribution network operation before and after access to the charging station, it is found that access to the charging station increases carbon emissions by a small amount; however, at the same time, it can greatly reduce the wind and PV curtailment rate, which verifies the correctness of the bi-level planning model.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B

References
- Das, H.; Rahman, M.; Li, S.; Tan, C. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 2020, 120, 109618. [Google Scholar] [CrossRef]
- Hu, Z.; Liu, S.; Luo, W. Intrusion-detector-dependent distributed economic model predictive control for load frequency regulation with PEVs under cyber attacks. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3857–3868. [Google Scholar] [CrossRef]
- Huang, Z.; Fang, B.; Deng, J. Multi-objective optimization strategy for distribution network considering V2G-enabled electric vehicles in building integrated energy system. Prot. Control Mod. Power Syst. 2020, 5, 48–55. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Q.; Farnoosh, A.; Chen, S.; Li, Y. GIS-based multi-objective particle swarm optimization of charging stations for electric vehicles. Energy 2019, 169, 844–853. [Google Scholar] [CrossRef]
- Wang, C.; Ju, P.; Wu, F.; Pan, X.; Wang, Z. A systematic review on power system resilience from the perspective of generation, network, and load. Renew. Sustain. Energy Rev. 2022, 167, 112567. [Google Scholar] [CrossRef]
- Mazumder, S.; Voss, L.; Dowling, K.; Conway, A.; Hall, D. Overview of wide/ultrawide bandgap power semiconductor devices for distributed energy resources. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 3957–3982. [Google Scholar] [CrossRef]
- Sun, J.; Xu, J.; Ke, D.; Liao, S.; Ling, Z. Cluster partition for distributed energy resources in regional integrated energy system. Energy Rep. 2023, 9, 613–619. [Google Scholar] [CrossRef]
- Strezoski, L.; Simic, N. Quantifying the impact of inverter-based distributed energy resource modeling on calculated fault current flow in microgrids. Int. J. Electr. Power Energy Syst. 2023, 151, 109161. [Google Scholar] [CrossRef]
- Wang, C.; Lei, S.; Ju, P.; Chen, C.; Peng, C.; Hou, Y. MDP-based distribution network reconfiguration with renewable distributed generation: An approximate dynamic programming approach. IEEE Trans. Smart Grid 2020, 11, 3620–3631. [Google Scholar] [CrossRef]
- Wang, C.; Ju, P.; Lei, S.; Wang, Z.; Wu, F.; Hou, Y. Markov decision process-based resilience enhancement for distribution systems: An approximate dynamic programming approach. IEEE Trans. Smart Grid 2020, 11, 2498–2510. [Google Scholar] [CrossRef]
- Hamrahi, M.; Mallaki, M.; Pirkolachahi, N.; Shirazi, N. Flexibility pricing of grid-connected energy hubs in the presence of uncertain energy resources. Int. J. Energy Res. 2023, 2023, 6798904. [Google Scholar] [CrossRef]
- Wu, C.; Jiang, S.; Gao, S.; Liu, Y.; Han, H. Charging demand forecasting of electric vehicles considering uncertainties in a microgrid. Energy 2022, 247, 123475. [Google Scholar] [CrossRef]
- Zhuang, Z.; Zheng, X.; Chen, Z.; Jin, T.; Li, Z. Load forecast of electric vehicle charging station considering multi-source information and user decision modification. Energies 2022, 15, 7021. [Google Scholar] [CrossRef]
- Feng, J.; Chang, X.; Fan, Y.; Luo, W. Electric vehicle charging load prediction model considering traffic conditions and temperature. Processes 2023, 11, 2256. [Google Scholar] [CrossRef]
- Koohfar, S.; Woldemariam, W.; Kumar, A. Prediction of electric vehicles charging demand: A transformer-based deep learning approach. Sustainability 2023, 15, 2105. [Google Scholar] [CrossRef]
- Huang, N.; He, Q.; Qi, J.; Hu, Q.; Wang, R.; Cai, G.; Yang, D. Multinodes interval electric vehicle day-ahead charging load forecasting based on joint adversarial generation. Int. J. Electr. Power Energy Syst. 2022, 143, 108404. [Google Scholar] [CrossRef]
- Hu, T.; Ma, H.; Liu, H.; Sun, H.; Liu, K. Self-attention-based machine theory of mind for electric vehicle charging demand forecast. IEEE Trans. Ind. Inform. 2022, 18, 8191–8202. [Google Scholar] [CrossRef]
- He, C.; Zhu, J.; Lan, J.; Li, S.; Wu, W.; Zhu, H. Optimal planning of electric vehicle battery centralized charging station based on EV load forecasting. IEEE Trans. Ind. Appl. 2022, 58, 6557–6575. [Google Scholar] [CrossRef]
- Hong, Z.; Shi, F. A multi-objective site selection of electric vehicle charging station based on NSGA-II. Int. J. Ind. Eng. Comput. 2024, 15, 293–306. [Google Scholar]
- Yin, W.; Ji, J.; Qin, X. Study on optimal configuration of EV charging stations based on second-order cone. Energy 2023, 284, 128494. [Google Scholar] [CrossRef]
- Jiang, Z.; Han, J.; Li, Y.; Chen, X.; Peng, T.; Xiong, J.; Shu, Z. Charging station layout planning for electric vehicles based on power system flexibility requirements. Energy 2023, 283, 128983. [Google Scholar] [CrossRef]
- Schoenberg, S.; Buse, D.; Dressler, F. Siting and sizing charging infrastructure for electric vehicles with coordinated recharging. IEEE Trans. Intell. Veh. 2023, 8, 1425–1438. [Google Scholar] [CrossRef]
- Wang, X.; Xia, W.; Yao, L.; Zhao, X. Improved bayesian best-worst networks with geographic information system for electric vehicle charging station selection. IEEE Access 2024, 12, 758–771. [Google Scholar] [CrossRef]
- Wu, Z.; Bhat, P.; Chen, B. Optimal configuration of extreme fast charging stations integrated with energy storage system and photovoltaic panels in distribution networks. Energies 2023, 16, 2385. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Z.; Miller, E.; Cui, D.; Liu, P.; Zhang, Z.; Sun, Z. Multi-period planning of locations and capacities of public charging stations. J. Energy Storage 2023, 72, 108565. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, B. Optimal planning of electric vehicle fast-charging stations considering uncertain charging demands via Dantzig-Wolfe decomposition. Sustainability 2023, 15, 6588. [Google Scholar] [CrossRef]
- Woo, H.; Son, Y.; Cho, J.; Kim, S.; Choi, S. Optimal expansion planning of electric vehicle fast charging stations. Appl. Energy 2023, 342, 121116. [Google Scholar] [CrossRef]
- Nasab, M.; Zand, M.; Dashtaki, A.; Padmanaban, S.; Blaabjerg, F.; Vasquez, Q. Uncertainty compensation with coordinated control of EVs and DER systems in smart grids. Sol. Energy 2023, 263, 111920. [Google Scholar] [CrossRef]
- Xu, M.; Li, W.; Feng, Z.; Bai, W.; Jia, L.; Wei, Z. Economic dispatch model of high proportional new energy grid-connected consumption considering source load uncertainty. Energies 2023, 16, 1696. [Google Scholar] [CrossRef]
- Ye, J.; Xie, L.; Ma, L.; Bian, Y.; Cui, C. Multi-scenario stochastic optimal scheduling for power systems with source-load matching based on pseudo-inverse Laguerre polynomials. IEEE Access 2023, 11, 133903–133920. [Google Scholar] [CrossRef]
- Bhavsar, S.; Pitchumani, R.; Ortega-Vazquez, M.; Costilla-Enriquez, N. A hybrid data-driven and model-based approach for computationally efficient stochastic unit commitment and economic dispatch under wind and solar uncertainty. Int. J. Electr. Power Energy Syst. 2023, 151, 109144. [Google Scholar] [CrossRef]
- Cao, Y.; Yao, J.; Tang, K.; Kang, Q. Dynamic origin-destination flow estimation for urban road network solely using probe vehicle trajectory data. J. Intell. Transp. Syst. 2023, 1–18. [Google Scholar] [CrossRef]
- Xu, W.; Chen, S.; Han, G.; Yu, N.; Xu, H. A Monte Carlo tree search-based method for decision making of generator serial restoration sequence. Front. Energy Res. 2023, 10, 1007914. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Symbol | Parameter Value | Parameter Symbol | Parameter Value |
|---|---|---|---|
| CNY 1,000,000 | 12/h | ||
| CNY 20,000 | 10 | ||
| CNY 5000 | 0.08 | ||
| CNY 0.5 | 0.0073 | ||
| CNY 20 | 0.01 | ||
| 0.048 CNY/MW | 24 | ||
| 0.012 CNY/MW | 3 |
| Categories | Time Interval | Price/(CNY/MWh) |
|---|---|---|
| Electricity purchase | Off-peak time (22:00~7:00) | 500 |
| Shoulder time (7:00~11:00, 14:00~18:00) | 750 | |
| Peak time (11:00~14:00, 18:00~22:00) | 1200 | |
| Electricity sale | Whole day | 300 |
| Unit Number | Upper and Lower Limits of Output | Climbing Upper and Lower Limits |
|---|---|---|
| Gas turbine 1 | 0.8/MW | 0.4/MW |
| Gas turbine 2 | 0.8/MW | 0.4/MW |
| Diesel unit 1 | 1.2/MW | 0.4/MW |
| Diesel unit 2 | 1.2/MW | 0.4/MW |
| Parameter Symbol | Parameter Value | Parameter Symbol | Parameter Value |
|---|---|---|---|
| CNY 413 | 375/(CNY/t) | ||
| CNY 490 | 0.4035/(t/MW) | ||
| CNY 650 | 0.6583/(t/MW) | ||
| CNY 650 | 1.72/(t/MW) | ||
| CNY 300 | 0.3901/(t/MW) | ||
| CNY 300 | 0.4828/(t/MW) | ||
| CNY 100 | 0.8729/(t/MW) | ||
| CNY 100 | 0.05 | ||
| CNY 100 | 0.1 | ||
| CNY 300 | 0.1 |
| Number of Charging Stations | Annualized Cost of the Charging Station/Million | User’s Annualized Economic Loss/Million | Annualized Total Economic Cost/Million |
|---|---|---|---|
| 5 | 1.797 | 6.795 | 8.593 |
| 6 | 2.431 | 4.205 | 6.636 |
| 7 | 2.747 | 3.221 | 5.968 |
| 8 | 2.975 | 2.969 | 5.944 |
| 9 | 3.278 | 2.863 | 6.142 |
| 10 | 3.582 | 2.821 | 6.403 |
| 11 | 3.888 | 2.658 | 6.546 |
| Charging Station Number | Transportation Network Nodes | Corresponding Distribution Nodes | Total Number of Charging Piles |
|---|---|---|---|
| A | 2 | 6 | 18 |
| B | 4 | 2 | 42 |
| C | 8 | 7 | 37 |
| D | 12 | 30 | 24 |
| E | 15 | 10 | 48 |
| F | 16 | 9 | 42 |
| G | 20 | 14 | 20 |
| H | 24 | 18 | 62 |
| Distribution Network Scenarios | Wind Curtailment Rate | PV Curtailment Rate | Carbon Emission/t | Carbon Emission Penalty/CNY | ||
|---|---|---|---|---|---|---|
| Not consider charging station access | Winter | 8.72% | Winter | 81.10% | 2.85 | 1067.66 |
| Summer | 22.82% | Summer | 66.48% | |||
| Consider charging station access | Winter | −0.48% | Winter | 42.48% | 4.03 | 1510.77 |
| Summer | 13.74% | Summer | 16.99% | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gan, H.; Ruan, W.; Wang, M.; Pan, Y.; Miu, H.; Yuan, X. Bi-Level Planning of Electric Vehicle Charging Stations Considering Spatial–Temporal Distribution Characteristics of Charging Loads in Uncertain Environments. Energies 2024, 17, 3004. https://doi.org/10.3390/en17123004
Gan H, Ruan W, Wang M, Pan Y, Miu H, Yuan X. Bi-Level Planning of Electric Vehicle Charging Stations Considering Spatial–Temporal Distribution Characteristics of Charging Loads in Uncertain Environments. Energies. 2024; 17(12):3004. https://doi.org/10.3390/en17123004
Chicago/Turabian StyleGan, Haiqing, Wenjun Ruan, Mingshen Wang, Yi Pan, Huiyu Miu, and Xiaodong Yuan. 2024. "Bi-Level Planning of Electric Vehicle Charging Stations Considering Spatial–Temporal Distribution Characteristics of Charging Loads in Uncertain Environments" Energies 17, no. 12: 3004. https://doi.org/10.3390/en17123004
APA StyleGan, H., Ruan, W., Wang, M., Pan, Y., Miu, H., & Yuan, X. (2024). Bi-Level Planning of Electric Vehicle Charging Stations Considering Spatial–Temporal Distribution Characteristics of Charging Loads in Uncertain Environments. Energies, 17(12), 3004. https://doi.org/10.3390/en17123004