
Advancing Electric Vehicle Infrastructure: A Review and Exploration of Battery-Assisted DC Fast Charging Stations

 ,
,  ,
,  ,
,  ,
,
Abstract
:1. Introduction
1.1. Standards in the Field
1.2. Challenges
1.3. State of the Art
1.4. Proposed Solution
1.4.1. Novelties of the Study
- Unlike traditional systems that rely on heavy and expensive transformers to step down grid voltage for EV charging, this study introduces a transformerless design that reduces cost, size, and complexity while increasing the feasibility of installing battery-assisted fast chargers in areas lacking robust infrastructure. The modular and mobile aspects of the proposed design allow for scalability and adaptability of charging infrastructure to meet varying demand without extensive redesign or reinstallation and optimize infrastructure utilization by relocating based on changing usage patterns or urban dynamics.
- This study’s proposed approach utilizes an integrated battery storage unit to alleviate the impact on the grid by storing energy during off-peak hours and using it to charge vehicles during peak times, effectively flattening the demand curve and alleviating pressure on local grid infrastructure. This battery-assisted system not only increases grid stability but also enables the usage of renewable energy sources by storing excess renewable energy produced during periods of low demand. The integration of smart energy management systems with artificial intelligence and machine learning techniques dynamically adjusts charging rates based on real-time energy consumption, battery health, grid demand, and electricity pricing, making it highly efficient and cost-effective.
1.4.2. Differences of This Study from Other Approaches in the Literature
- Traditional DC fast charging systems often do not include energy storage and thus must be capable of managing high peaks of power demand directly from the grid. This can lead to higher infrastructure costs and strain on the grid. Conversely, the proposed system’s use of stored energy for peak shaving reduces these demands and related costs.
- Many existing approaches still mainly depend on the continuous availability and stability of the grid. The proposed approach increases reliability by decoupling the charging function from immediate grid conditions by offering a more consistent and dependable service, especially in regions with unstable grid conditions.
- The novel system is designed to be user-friendly, incorporating standards such as ISO 15118 and OCPP, which simplify the charging process for end-users. This ease of use is expected to enhance user experience and adoption rates compared to more complex systems.
- The scalability in the proposed approach is economically managed through the modular design, which provides incremental investment and expansion aligned with actual demand growth differing from traditional systems that may require significant upfront investments in infrastructure capable of handling projected future demands.
1.4.3. Possible Limitations within the Proposed Approach
- The effectiveness and reliability of battery-assisted systems heavily rely on the advancement of battery technologies, especially depending on energy density, charging speed, and lifecycle factors.
- While these systems drastically decrease the load on the grid during peak times, they still count on the grid for recharging the batteries which means that total independence from grid limitations and vulnerabilities cannot be fully achieved.
- Utilization of battery-assisted charging stations can create regulatory difficulties and additional requirements for standardization across different regions, which can slow down adoption speed.
- Battery performance can be considerably affected by extreme temperatures, which can impact the reliability of charging stations in harsh climates.
- There can be difficulties in efficiently managing the stored energy, particularly in predicting the correct amount of energy to store and release, given the variability conditions in EV charging demand.
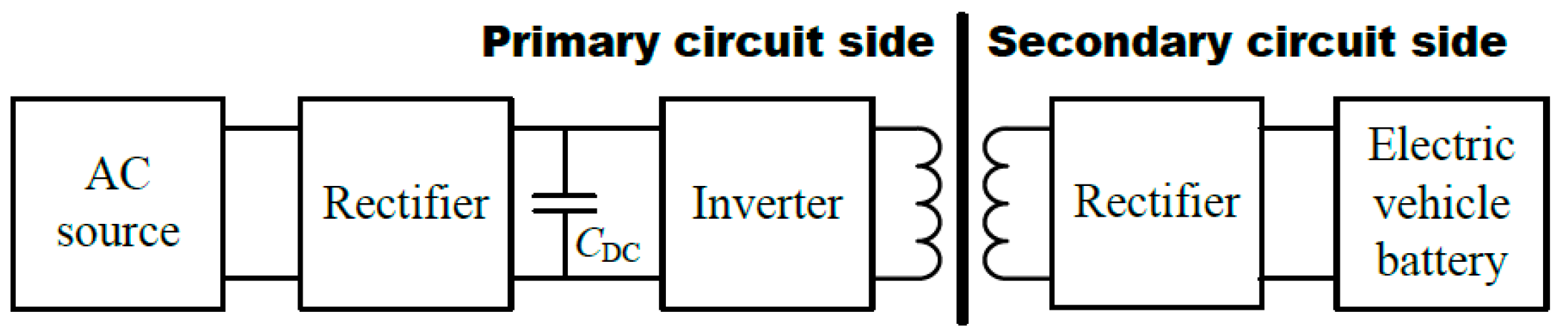
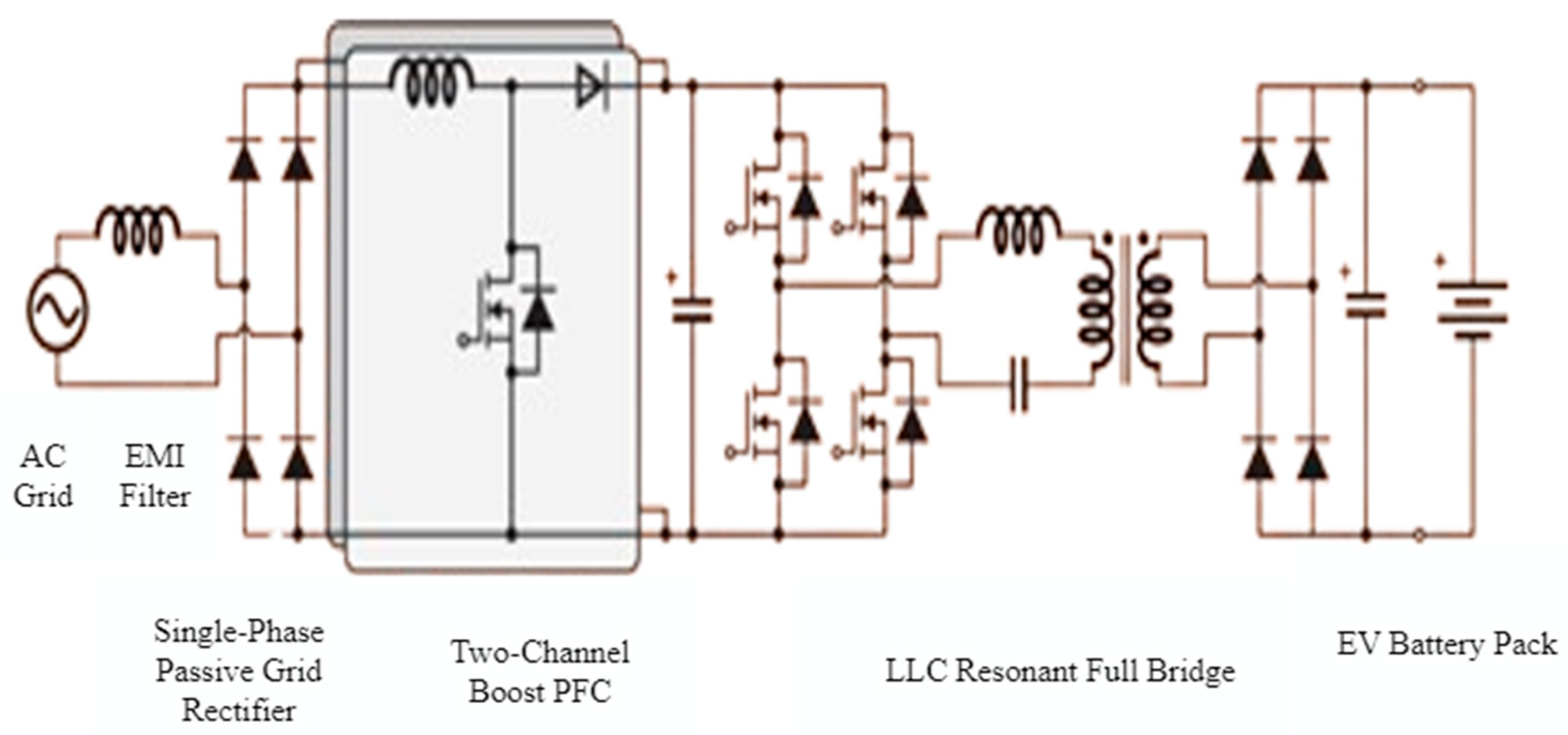
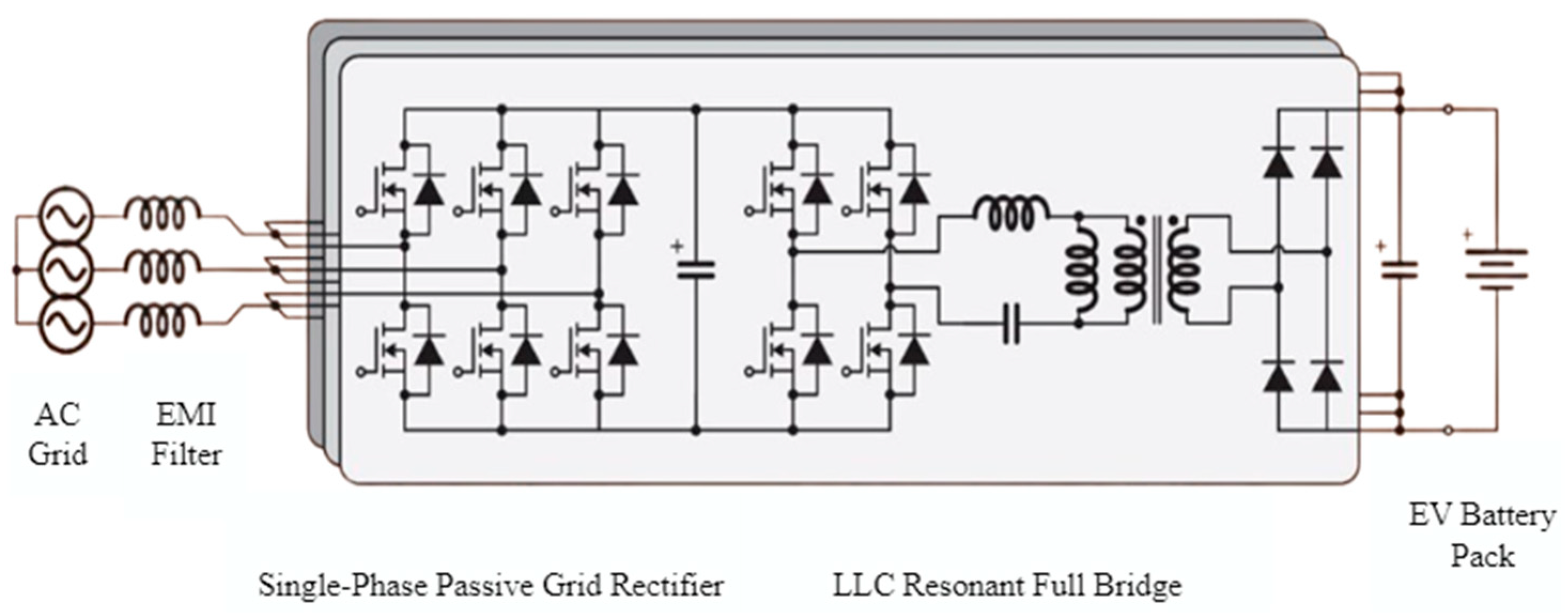
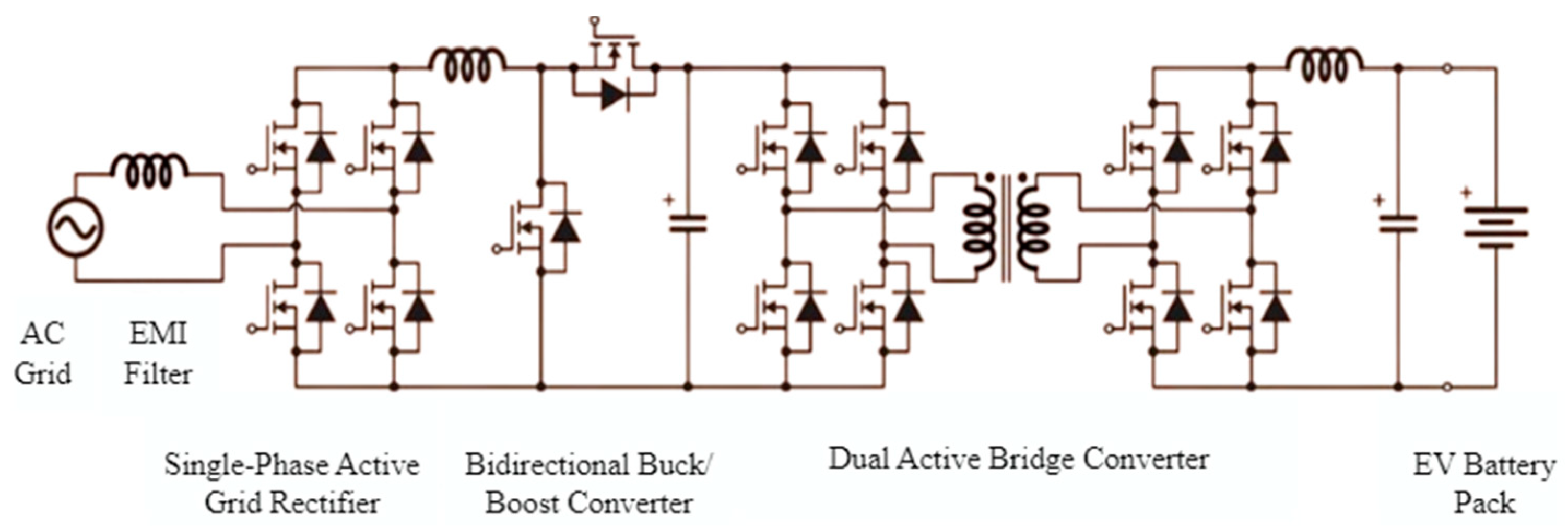
2. Power Electronics Circuit of DC Fast Charging Stations
3. Conceptual Overview of Proposed System
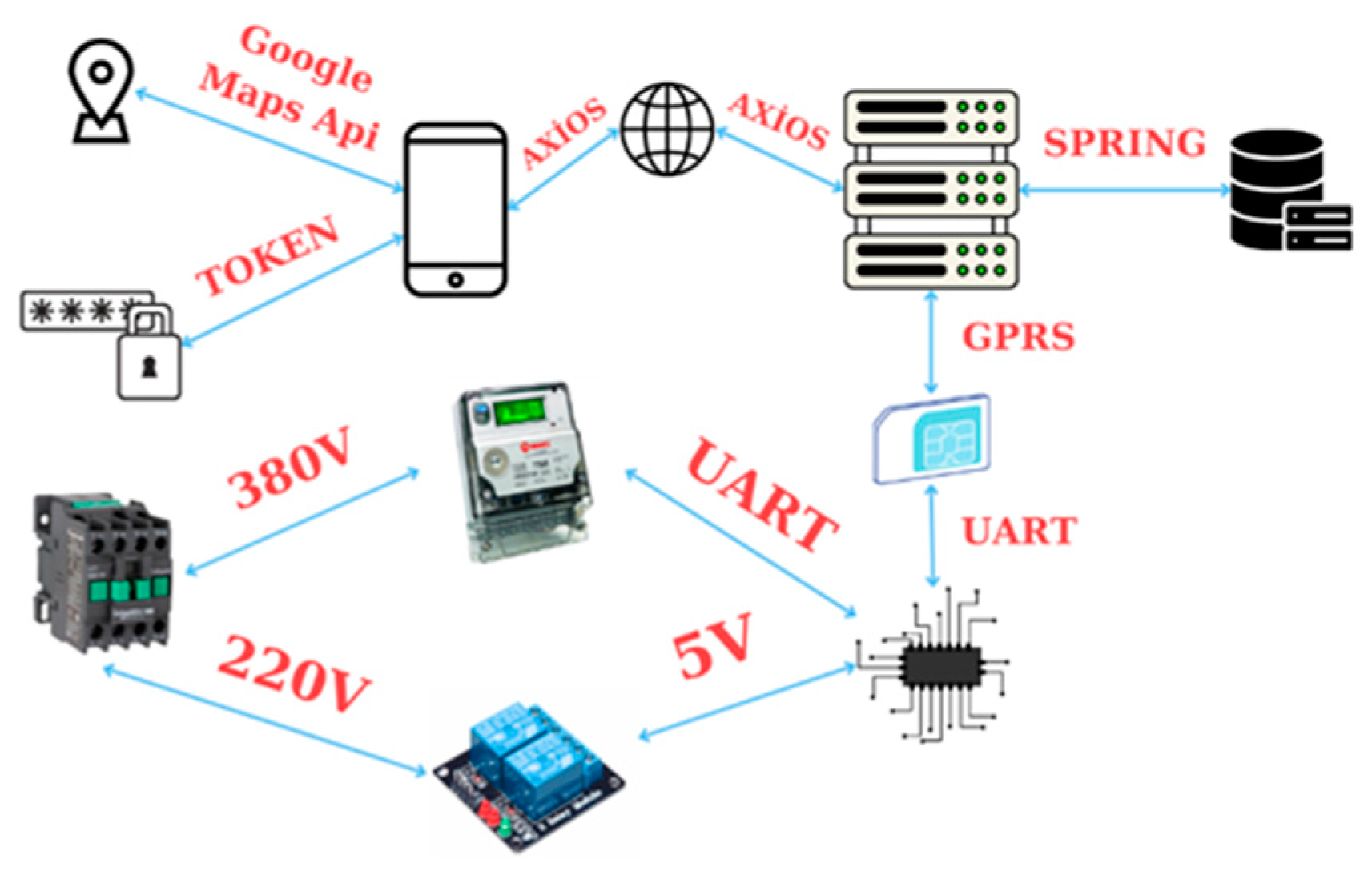
3.1. Communication and Electronic Design for Transformerless Mobile Modular DC Fast Charging Station
- (1)
- The required vehicle information will be transmitted to the charging station through the communication pins located in the two sockets of the charging cable.
- (2)
- Thanks to the smart meter contained in the charging station, how much power is transferred to the vehicle can be measured instantly. This power data will be transferred to the charging station’s motherboard through the data transfer port of the smart meter.
- (3)
- The data contained in the charging station will be transferred to the server via the GSM module that communicates with the motherboard of the charging station.
- (4)
- Thanks to the website prepared for users who own charging stations, it will be possible to change the electricity price determined by distribution companies at any time. The determined electricity price will be transferred to the server and the amount to be paid will be calculated according to the power drawn by the users and their consumption.
- (5)
- All these collected data will be combined on the server and transferred to the mobile software over the internet to be displayed to the user. In this way, users will be able to see all information instantly [35].
3.2. Battery Technical Features
3.2.1. Battery Cell Type
3.2.2. Battery Cathode Chemistry
3.2.3. Lithium Cobalt Oxide (LCO)
3.2.4. Lithium Nickel Manganese Cobalt Oxide (LiNixMnyCozO2, NMC)
3.2.5. Lithium Iron Phosphate (LiFePO4, LFP)
3.2.6. Lithium Nickel Cobalt Aluminium (NCA)
3.2.7. Lithium Manganese Oxide, Spinel (LMO, LiMn2O4)
3.2.8. Cell Type Selection
3.2.9. Battery Package for DC Charging Station
3.2.10. Possible Contributions of AI (Artificial Intelligence) and ML (Machine Learning) Approaches for Battery-Assisted DC Fast Charging Systems
- Predictive Maintenance: AI and ML models can be utilized to predict battery health and the need for maintenance or replacement of charging station components based on historical data and real-time monitoring. Consequently, this enhances the reliability and longevity of the charging infrastructure, decreases downtime, and reduces maintenance costs. However, as a possible limitation, these models can require high-quality data for accurate predictions and initial setup and integration can be complex and resource-intensive. As an example, regression models and neural networks can predict the remaining useful life (RUL) of batteries by learning from historical operational data and charge/discharge cycles.
- Demand Prediction: Taking historical charging data and other relevant variables such as time of day, day of the week, or local events into account, ML and AI models can predict demand at charging stations. Naturally this further leverages the energy management and ensures that adequate resources are accessible during peak times without overstraining the grid. But again as a limitation, prediction accuracy can be affected by unexpected external variables and factors. Specifically, time-series-based models such as LSTM (Long-Short Term Memory) and RNN (Recurrent Neural Network) can be utilized for estimating future charging station usage.
- Optimal Charging Planning: These models can be deployed to plan the charging process by balancing the load on the grid and maximizing the usage of renewable energy sources. This can further increase grid stability and maximizes the use of cheaper and greener energy sources. However, the model for that task frequently requires real-time sample information and can be complicated to implement in systems with multiple variables. Specifically, RL (Reinforcement Learning) models can be trained to find the optimal charging strategy for minimizing cost and charging time while maximizing battery life.
- Battery Management and Health Monitoring: Deep learning models can be implemented to observe the state of health (SoH) and state of charge (SoC) of batteries to maximize their usage and prevent overcharging or deep discharging issues. But again, these models can highly rely on the quality of sensor information and can be computationally intensive. Support Vector Machines (SVM), Convolutional Neural Networks (CNNs), and Recurrent Neural Networks (RNNs) are generally deployed to analyze voltage, current, and temperature data to assess battery conditions continuously for this task.
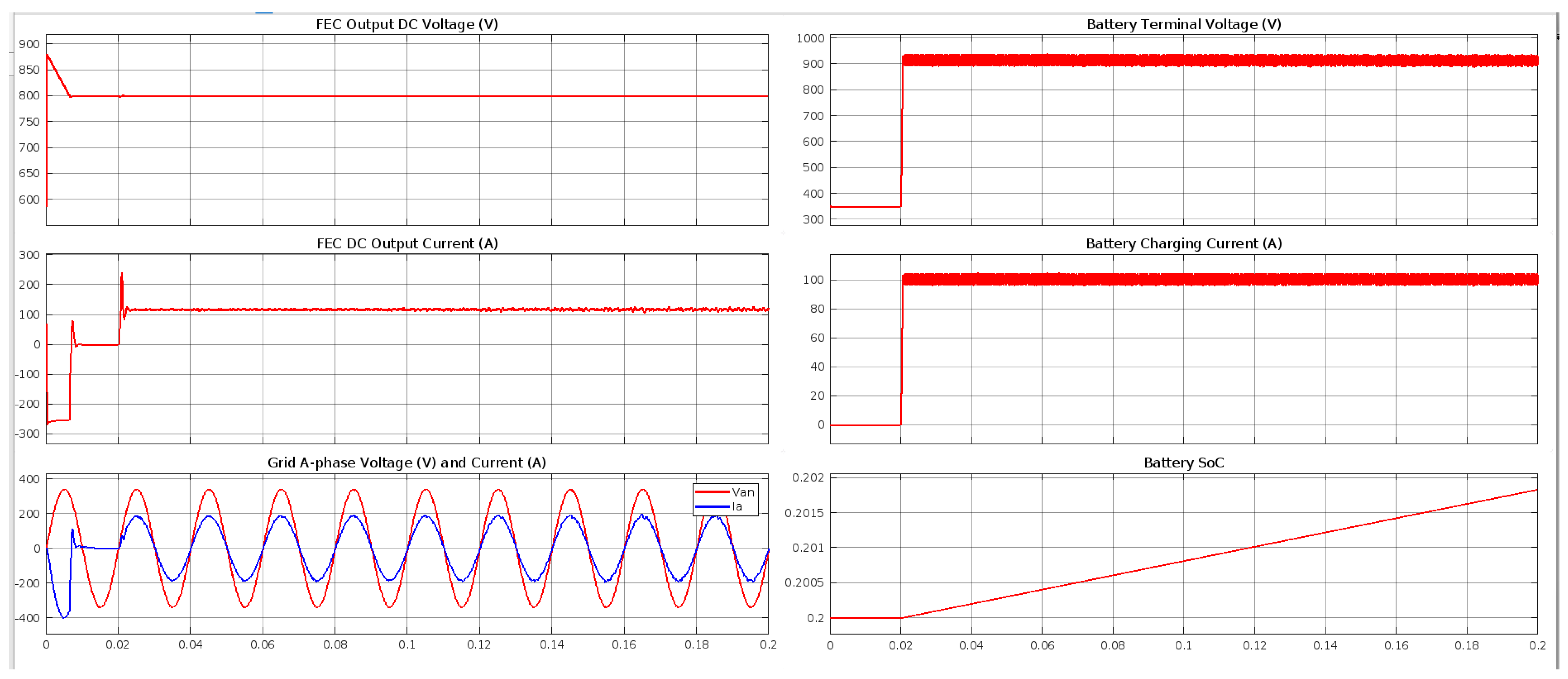
4. DC Fast Charging Station Modelling and Control
- Grid: Model the AC supply voltage as a three-phase constant voltage source.
- DC Fast Charging Station: Model the power electronic circuits that convert the AC supply voltage from the grid to the DC voltage level required by the EV battery pack.
- ○
- Filter & AC Measurements to filter the harmonics in the line current and measure the three-phase supply voltage and line current.
- ○
- Unity Power Factor (UPF) Front End Converter (FEC) to control output DC voltage at 800 V.
- ○
- Two-level and three-level inverter fidelity.
- ○
- Isolated DC-DC converter supplies constant charging current to the EV battery.
- EV Battery Pack: Model the battery pack as a series of battery cells.
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Singh, B.; Verma, A.; Chandra, A.; Al-Haddad, K. Implementation of Solar PV-Battery and Diesel Generator Based Electric Vehicle Charging Station. IEEE Trans. Ind. Appl. 2020, 56, 4007–4016. [Google Scholar] [CrossRef]
- Paudel, D.; Das, T.K. Das A deep reinforcement learning approach for power management of battery-assisted fast-charging EV hubs participating in day-ahead and real-time electricity markets. Energy 2023, 283, 129097. [Google Scholar] [CrossRef]
- Cui, D.; Wang, Z.; Liu, P.; Wang, S.; Dorrell, D.G.; Li, X.; Zhan, W. Operation optimization approaches of electric vehicle battery swapping and charging station: A literature review. Energy 2023, 263, 126095. [Google Scholar] [CrossRef]
- Kokchang, P.; Chattranont, N.; Menaneatra, T.; Phetriang, N.; Lertmanokul, C.; Nateprapai, N.; Chaitusaney, S.; Larbwisuthisaroj, S.; Srianthumrong, S. Economic Feasibility of Hybrid Solar-Powered Charging Station with Battery Energy Storage System in Thailand. Int. J. Energy Econ. Policy 2023, 13, 342–355. [Google Scholar] [CrossRef]
- Jain, V.; Singh, B. A Grid Connected PV Array and Battery Energy Storage Interfaced EV Charging Station. IEEE Trans. Transp. Electrif. 2023, 9, 3723–3730. [Google Scholar] [CrossRef]
- Aydin, E.; Aydemir, M.T.; Aksoz, A.; El Baghdadi, M.; Hegazy, O. Inductive Power Transfer for Electric Vehicle Charging Applications: A Comprehensive Review. Energies 2022, 15, 4962. [Google Scholar] [CrossRef]
- Hassoune, A.; Khafallah, M.; Hassoune, A.; Khafallah, M.; Mesbahi, A.; Bouragba, T. Power Management Strategies of Electric Vehicle Charging Station Based Grid Tied PV-Battery System Abdelouahed Mesbahi Ecole Nationale Supérieure d’Electricité et de Mécanique de Casablanca Power Management Strategies of Electric Vehicle Charging Station Based Grid Tied PV-Battery System. 2018. Available online: https://www.researchgate.net/publication/325999800 (accessed on 4 June 2024).
- Ataseven, I.; Sahin, I.; Ozturk, S.B. Design and Implementation of a Paralleled Discrete SiC MOSFET Half-Bridge Circuit with an Improved Symmetric Layout and Unique Laminated Busbar. Energies 2023, 16, 2903. [Google Scholar] [CrossRef]
- Tan, X.; Qu, G.; Sun, B.; Li, N.; Tsang, D.H.K. Optimal scheduling of battery charging station serving electric vehicles based on battery swapping. IEEE Trans Smart Grid 2019, 10, 1372–1384. [Google Scholar] [CrossRef]
- Lan, Y.; Benomar, Y.; Deepak, K.; Aksoz, A.; El Baghdadi, M.; Bostanci, E.; Hegazy, O. Switched reluctance motors and drive systems for electric vehicle powertrains: State of the art analysis and future trends. Energies 2021, 14, 2079. [Google Scholar] [CrossRef]
- Oyucu, S.; Doğan, F.; Aksöz, A.; Biçer, E. Comparative Analysis of Commonly Used Machine Learning Approaches for Li-ion Battery Performance Prediction and Management in Electric Vehicles. Appl. Sci. 2024, 14, 2306. [Google Scholar] [CrossRef]
- Wang, Y.; Aksoz, A.; Geury, T.; Ozturk, S.B.; Kivanc, O.C.; Hegazy, O. A review of modular multilevel converters for stationary applications. Appl. Sci. 2020, 10, 7719. [Google Scholar] [CrossRef]
- Mültin, M. ISO 15118 as the Enabler of Vehicle-to-Grid Applications. In Proceedings of the 2018 International Conference of Electrical and Electronic Technologies for Automotive, Milan, Italy, 9–11 July 2018; pp. 1–6. [Google Scholar]
- Garofalaki, Z.; Kosmanos, D.; Moschoyiannis, S.; Kallergis, D.; Douligeris, C. Electric vehicle charging: A survey on the security issues and challenges of the open charge point protocol (OCPP). IEEE Commun. Surv. Tutor. 2022, 24, 1504–1533. [Google Scholar] [CrossRef]
- El Ghanam, E.; Hassan, M.; Osman, A.; Ahmed, I. Review of communication technologies for electric vehicle charging management and coordination. World Electr. Veh. J. 2021, 12, 92. [Google Scholar] [CrossRef]
- Yahaya, A.A.; Edpuganti, A.; Khadkikar, V.; Zeineldin, H. A Novel Simultaneous AC and DC Charging Scheme for Electric Vehicles. IEEE Trans. Energy Convers. 2024. Early Access. [Google Scholar] [CrossRef]
- Lombardo, T.; Duquesnoy, M.; El-Bouysidy, H.; Årén, F.; Gallo-Bueno, A.; Jørgensen, P.B.; Bhowmik, A.; Demortière, A.; Ayerbe, E.; Alcaide, F.; et al. Artificial intelligence applied to battery research: Hype or reality? Chem. Rev. 2021, 122, 10899–10969. [Google Scholar] [CrossRef]
- Shibl, M.; Ismail, L.; Massoud, A. Electric vehicles charging management using machine learning considering fast charging and vehicle-to-grid operation. Energies 2021, 14, 6199. [Google Scholar] [CrossRef]
- Şen, M.; Özcan, M.; Eker, Y.R. A review on the lithium-ion battery problems used in electric vehicles. Next Sustain. 2024, 3, 100036. [Google Scholar] [CrossRef]
- Xia, Y.; Zheng, J.; Wang, C.; Gu, M. Designing principle for Ni-rich cathode materials with high energy density for practical applications. Nano Energy 2018, 49, 434–452. [Google Scholar] [CrossRef]
- Hadouchi, M.; Koketsu, T.; Hu, Z.; Ma, J. The origin of fast-charging lithium iron phosphate for batteries. Battery Energy 2002, 1, 20210010. [Google Scholar] [CrossRef]
- Julien, C.M.; Mauger, A. NCA, NCM811, and the Route to Ni-Richer Lithium-ion Batteries. Energies 2020, 13, 6363. [Google Scholar] [CrossRef]
- Stavropoulos, P.; Sabatakakis, K.; Bikas, H. Welding Challenges and Quality Assurance in Electric Vehicle Battery Pack Manufacturing. Batteries 2024, 10, 146. [Google Scholar] [CrossRef]
- Tu, H.; Feng, H.; Srdic, S.; Lukic, S. Extreme fast charging of electric vehicles: A technology overview. IEEE Trans. Transp. Electrif. 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Majidpour, M.; Qiu, C.; Chung, C.Y.; Chu, P.; Gadh, R.; Pota, H.R. Fast demand forecast of electric vehicle charging stations for cell phone application. In Proceedings of the 2014 IEEE PES General Meeting|Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Aksoz, A.; Song, Y.; Saygin, A.; Blaabjerg, F.; Davari, P. Improving performance of three-phase slim DC-link drives utilizing virtual positive impedance-based active damping control. Electronics 2018, 7, 234. [Google Scholar] [CrossRef]
- Ogan, S.E.; Bostanci, E. Capacitor sizing of three-level neutral point clamped voltage source inverter for electric vehicles: Effects of modulation and motor characteristics. IET Power Electron. 2024. Early View. [Google Scholar] [CrossRef]
- Unsal, D.B.; Aksoz, A.; Oyucu, S.; Guerrero, J.M.; Guler, M. A Comparative Study of AI Methods on Renewable Energy Prediction for Smart Grids: Case of Turkey. Sustainability 2024, 16, 2894. [Google Scholar] [CrossRef]
- Oyucu, S.; Dümen, S.; Duru, I.; Aksöz, A.; Biçer, E. Discharge Capacity Estimation for Li-ion Batteries: A Comparative Study. Symmetry 2024, 16, 436. [Google Scholar] [CrossRef]
- Aksoz, A. An optimized overcurrent protection study using enough number of sfcl at optimal points of a distributed real city grid. Teh. Vjesn. 2021, 28, 104–112. [Google Scholar] [CrossRef]
- Özden, S.; Dursun, M.; Aksöz, A.; Saygın, A. Prediction and Modelling of Energy Consumption on Temperature Control for Greenhouses. J. Polytech. 2018, 22, 213–217. [Google Scholar] [CrossRef]
- Yilmaz, E.N.; Polat, H.; Oyucu, S.; Aksoz, A.; Saygin, A. Data storage in smart grid systems. In Proceedings of the 2018 6th International Istanbul Smart Grids and Cities Congress and Fair (ICSG), Istanbul, Turkey, 25–26 April 2018; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2018; pp. 110–113. [Google Scholar] [CrossRef]
- Yilmaz, E.N.; Aksoz, A.; Saygin, A. Design of an off-grid model of micro-smart grid connection of an asynchronous motor fed with LUO converter. Electr. Eng. 2018, 100, 2659–2666. [Google Scholar] [CrossRef]
- Al Wahedi, A.; Bicer, Y. Comprehensive Review of Recent Electric Vehicle Charging Stations. 2021. Available online: https://www.academia.edu/97732945/Comprehensive_Review_of_Recent_Electric_Vehicle_Charging_Stations (accessed on 4 June 2024).
- Al Wahedi, A.; Bicer, Y. Development of an off-grid electrical vehicle charging station hybridized with renewables including battery cooling system and multiple energy storage units. Energy Rep. 2020, 6, 2006–2021. [Google Scholar] [CrossRef]
- Shchegolkov, A.V.; Komarov, F.F.; Lipkin, M.S.; Milchanin, O.V.; Parfimovich, I.D.; Shchegolkov, A.V.; Semenkova, A.V.; Velichko, A.V.; Chebotov, K.D.; Nokhaeva, V.A. Synthesis and study of cathode materials based on carbon nanotubes for Lithium-ion batteries. Inorg. Mater. Appl. Res. 2021, 12, 1281–1287. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, J.; Yuan, Y.; Jiang, Q.; Yan, C. Vertically aligned NiCo2O4 nanosheet-encapsulated carbon fibers as a self-supported electrode for superior Li+ storage performance. Nanomaterials 2019, 9, 1336. [Google Scholar] [CrossRef]
- Shchegolkov, A.V.; Lipkin, M.S.; Shchegolkov, A.V.; Korbova, E.V.; Lipkina, T.V.; Lipkin, V.M. On the mechanism of formation of electrochromic WO3 films on the surface of Sn, Ti, ITO electrodes in the process of cathodic electrodeposition. Inorg. Mater. Appl. Res. 2022, 13, 1605–1614. [Google Scholar] [CrossRef]
- Shchegolkov, A.V.; Lipkin, M.S.; Shchegolkov, A.V. Preparation of WO3 films on titanium and graphite foil for fuel cell and supercapacitor applications by electrochemical (cathodic) deposition method. Russ. J. Gen. Chem. 2022, 92, 1161–1167. [Google Scholar] [CrossRef]
- Amarasekara, A.S.; Wang, D.; Shrestha, A.B. Efficient leaching of metal ions from spent Li-ion battery combined electrode coatings using hydroxy acid mixtures and regeneration of lithium nickel manganese cobalt oxide. Batteries 2024, 10, 170. [Google Scholar] [CrossRef]
- Chikkannanavar, S.B.; Bernardi, D.M.; Liu, L. A review of blended cathode materials for use in Li-ion batteries. J. Power Sources 2014, 248, 91–100. [Google Scholar] [CrossRef]
- Uzun, D.; Dogrusoz, M.; Mazman, M.; Bicer, E.; Avci, E.; Sener, T.; Kaypmaz, T.C.; Cakan, R.D. Effect of MnO2 coating on layered Li(Li0.1Ni0.3Mn0.5Fe0.1)O2 cathode material for Li-ion batteries. Solid State Ion. 2013, 249, 171–176. [Google Scholar] [CrossRef]
- Mazman, M.; Çuhadar, Ö.; Uzun, D.E.; Avcı,, E.; Bicer, E.; Kaypmaz, T.C.; Kadiroğlu, Ü. Optimization of LiFePO4 synthesis by hydrothermal method. Turk. J. Chem. 2014, 38, 297. [Google Scholar] [CrossRef]
- Goriparti, S.; Miele, E.; De Angelis, F.; Di Fabrizio, E.; Zaccaria, R.P.; Capiglia, C. Review on recent progress of nanostructured anode materials for Li-ion batteries. J. Power Sources 2014, 257, 421–443. [Google Scholar] [CrossRef]
- Choi, S.; Wang, G. Advanced Lithium-ion Batteries for Practical Applications: Technology, Development, and Future Perspectives. Adv. Mater. Technol. 2018, 3, 1700376. [Google Scholar] [CrossRef]
- Biçer, E.; Mazman, M.; Kaypmaz, C.; Uzun, D. Li-iyon Piller ve Uygulamaları. Nobel Yayınevi, Aralık; Nobel Yayıncılık: Ankara, Türkiye, 2021; ISBN 978-625-406-870-6. [Google Scholar]
- Oliveira Filho, H.R.; Zanin, H.; Monteiro, R.S.; Barbosa, M.H.P.; Teófilo, R.F. High-nickel cathodes for lithium-ion batteries: From synthesis to electricity. J. Energy Storage 2024, 82, 110536. [Google Scholar] [CrossRef]
- Suarez, C.; Martinez, W. Fast and ultra-fast charging for battery electric vehicles—A review. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019. [Google Scholar]
- Xie, W.; Liu, X.; He, R.; Li, Y.; Gao, X.; Li, X.; Peng, Z.; Feng, S.; Feng, X.; Yang, S. Challenges and opportunities toward fast-charging of lithium-ion batteries. J. Energy Storage 2020, 32, 101837. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, Y.; Cui, Y. Challenges and opportunities towards fast-charging battery materials. Nat. Energy 2019, 4, 540–550. [Google Scholar] [CrossRef]
- Weiss, M.; Ruess, R.; Kasnatscheew, J.; Levartovsky, Y.; Levy, N.R.; Minnmann, P.; Stolz, L.; Waldmann, T.; Wohlfahrt-Mehrens, M.; Aurbach, D.; et al. Fast charging of lithium-ion batteries: A review of materials aspects. Adv. Energy Mater. 2021, 11, 2101126. [Google Scholar] [CrossRef]
- Wei, Z.; Yang, X.; Li, Y.; He, H.; Li, W.; Sauer, D.U. Machine learning-based fast charging of lithium-ion battery by perceiving and regulating internal microscopic states. Energy Storage Mater. 2023, 56, 62–75. [Google Scholar] [CrossRef]
- Shah, A.; Shah, K.; Shah, C.; Shah, M. State of charge, remaining useful life and knee point estimation based on artificial intelligence and Machine learning in lithium-ion EV batteries: A comprehensive review. Renew. Energy Focus 2022, 42, 146–164. [Google Scholar] [CrossRef]
- Manoj, D.; Josh, F.T. A comprehensive review on optimization and artificial intelligence algorithms for effective battery management in EVs. Int. J. Electr. Electron. Eng. Telecommun. 2023, 12, 334–341. [Google Scholar] [CrossRef]
- Shibl, M.; Ismail, L.; Massoud, A. Machine learning-based management of electric vehicles charging: Towards highly-dispersed fast chargers. Energies 2020, 13, 5429. [Google Scholar] [CrossRef]
- Mazhar, T.; Asif, R.N.; Malik, M.A.; Nadeem, M.A.; Haq, I.; Iqbal, M.; Kamran, M.; Ashraf, S. Electric vehicle charging system in the smart grid using different machine learning methods. Sustainability 2023, 15, 2603. [Google Scholar] [CrossRef]
- Khawaja, Y.; Shankar, N.; Qiqieh, I.; Alzubi, J.; Alzubi, O.; Nallakaruppan, M.; Padmanaban, S. Battery management solutions for li-ion batteries based on artificial intelligence. Ain Shams Eng. J. 2023, 14, 102213. [Google Scholar] [CrossRef]
- Ng, M.-F.; Zhao, J.; Yan, Q.; Conduit, G.J.; Seh, Z.W. Predicting the state of charge and health of batteries using data-driven machine learning. Nat. Mach. Intell. 2020, 2, 161–170. [Google Scholar] [CrossRef]
- Zentani, A.; Almaktoof, A.; Kahn, M.T. A Comprehensive Review of Developments in Electric Vehicles Fast Charging Technology. Appl. Sci. 2024, 14, 4728. [Google Scholar] [CrossRef]
- Narasipuram, R.P.; Mopidevi, S.; Dianov, A.; Tandon, A.S. Analysis of Scalable Resonant DC–DC Converter Using GaN Switches for xEV Charging Stations. World Electr. Veh. J. 2024, 15, 218. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Charging Method | No. Phases | Nominal Voltage (V) | Max. Current (A) | |
|---|---|---|---|---|
| AC | Mod 1 | 1 | ≤250 | ≤16 |
| 3 | ≤480 | |||
| Mod 2 | 1 | ≤250 | ≤32 | |
| 3 | ≤480 | |||
| Mod 3 | 1 | ≤250 | ≤250 | |
| 3 | ≤480 | |||
| DC | Mod 4 | - | ≤1000 | ≤400 |
| SAE J1772 | IEC 61851 | GB/T 20234-2 | TESLA | ||||
|---|---|---|---|---|---|---|---|
| AC Level 1 | AC Level 2 | Modes 1 | Modes 2–3 | GB/T | Mobile Connection | Wall Connection | |
| Max. Power | 1.9 kW | 19.2 kW | 4 kW (13.3 kW) | 8 kW (22 kW) | 7 kW (12.8 kW) | 1.9 kW (7.7 kW) | 2.8 kW (11.5 kW) |
| Input Voltage | 120 V, single phase | 240 V, split phase | 250 V, single phase (480 V, three phase) | 250 V, single phase (400 V, single phase) | 120 V, single phase (240 V, single phase) | 208 V, single phase (250 V, single phase) | |
| Max. Current | 16 A | 80 A | 16 A | 32 A | 32 A | 16/32 A | |
| Communication | PLC | None | PLC | CAN | CAN | ||
| Region | USA, Japan, Republic of Korea | Europe, Australia | China, India | Global | |||
| Related Standards | IEC 61851-22/23 IEC 62196-2 SAE J1772-2017 | IEC 61851-22/23 IEC 62196-2 | GB/T 20234-2 IEC 62196-2 | IEC 62196-2 | |||
| Vehicle to device | Under Development | No | No | ||||
| Plug type |  |  |  |  | |||
| Voltage | State | Explanation |
|---|---|---|
| +12 V | State A | No EV connected to the EVSE |
| +9 V | State B | EV connected to the EVSE, but not ready for charging |
| +6 V | State C | Connected and ready for charging, ventilation is not required |
| +3 V | State D | Connected, ready for charging, and ventilation is required |
| +0 V | State E | Electrical short to earth on the controller of the EVSE, no power supply |
| −12 V | State F | EVSE is unavailable |
| Pouch Cell | Cylindrical Cell | Prismatic Cell | |
|---|---|---|---|
| Advantages | The outer structure of the cell has minimal impact since the packaging material has a low mass, allowing for high energy density in the battery. | The process exhibits high maturity levels, featuring a well-developed shell structure, and it incurs low manufacturing costs. | The cell offers high protection, facilitating efficient internal heat conduction through reduced single-cell thickness, leading to significantly improved safety performance. Additionally, individual cells boast high capacity, resulting in the need for fewer cells in the battery pack. |
| Disadvantages | Large-capacity batteries pose challenges in the sealing process, being less reliable and more complex. The mechanical strength of the aluminum-plastic composite encapsulation film used is relatively low, limiting the battery’s service life based on the film’s lifespan. | The collector may experience uneven current density distribution, leading to inconsistent responses from internal components. This can hinder the quick release of heat generated within the battery cell, potentially creating a safety hazard due to heat accumulation. | The internal structure is complex, requiring high production process standards. Initially, the cells had low energy density, but there have been significant advancements in recent years, leading to major breakthroughs in this area. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aksoz, A.; Asal, B.; Biçer, E.; Oyucu, S.; Gençtürk, M.; Golestan, S. Advancing Electric Vehicle Infrastructure: A Review and Exploration of Battery-Assisted DC Fast Charging Stations. Energies 2024, 17, 3117. https://doi.org/10.3390/en17133117
Aksoz A, Asal B, Biçer E, Oyucu S, Gençtürk M, Golestan S. Advancing Electric Vehicle Infrastructure: A Review and Exploration of Battery-Assisted DC Fast Charging Stations. Energies. 2024; 17(13):3117. https://doi.org/10.3390/en17133117
Chicago/Turabian StyleAksoz, Ahmet, Burçak Asal, Emre Biçer, Saadin Oyucu, Merve Gençtürk, and Saeed Golestan. 2024. "Advancing Electric Vehicle Infrastructure: A Review and Exploration of Battery-Assisted DC Fast Charging Stations" Energies 17, no. 13: 3117. https://doi.org/10.3390/en17133117