

A Contoured Controller Bode-Based Iterative Tuning Method for Multi-Band Power System Stabilizers

Abstract
:1. Introduction
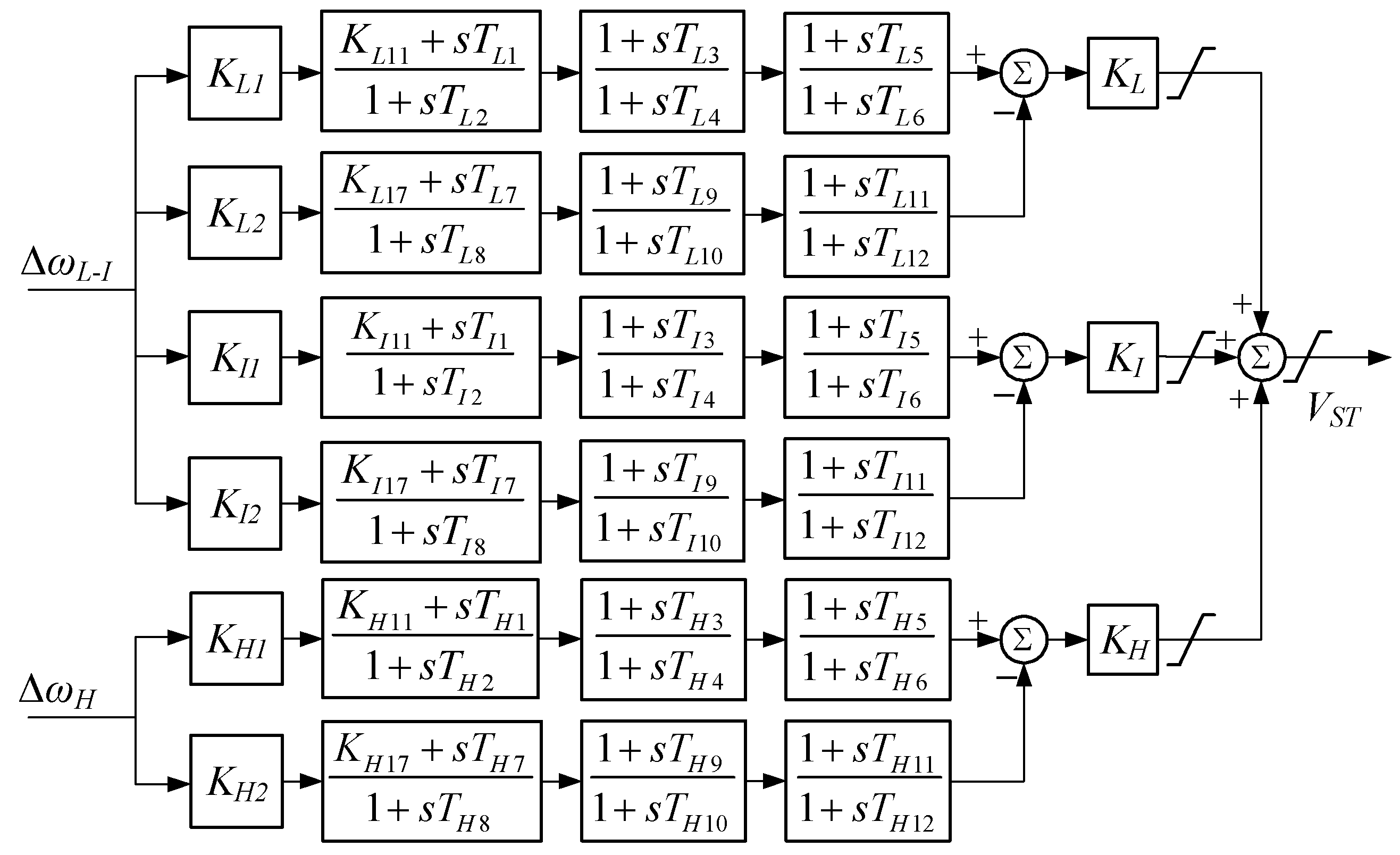
2. Revised Model of PSS4B
2.1. The Limitation of the Symmetrical Approach
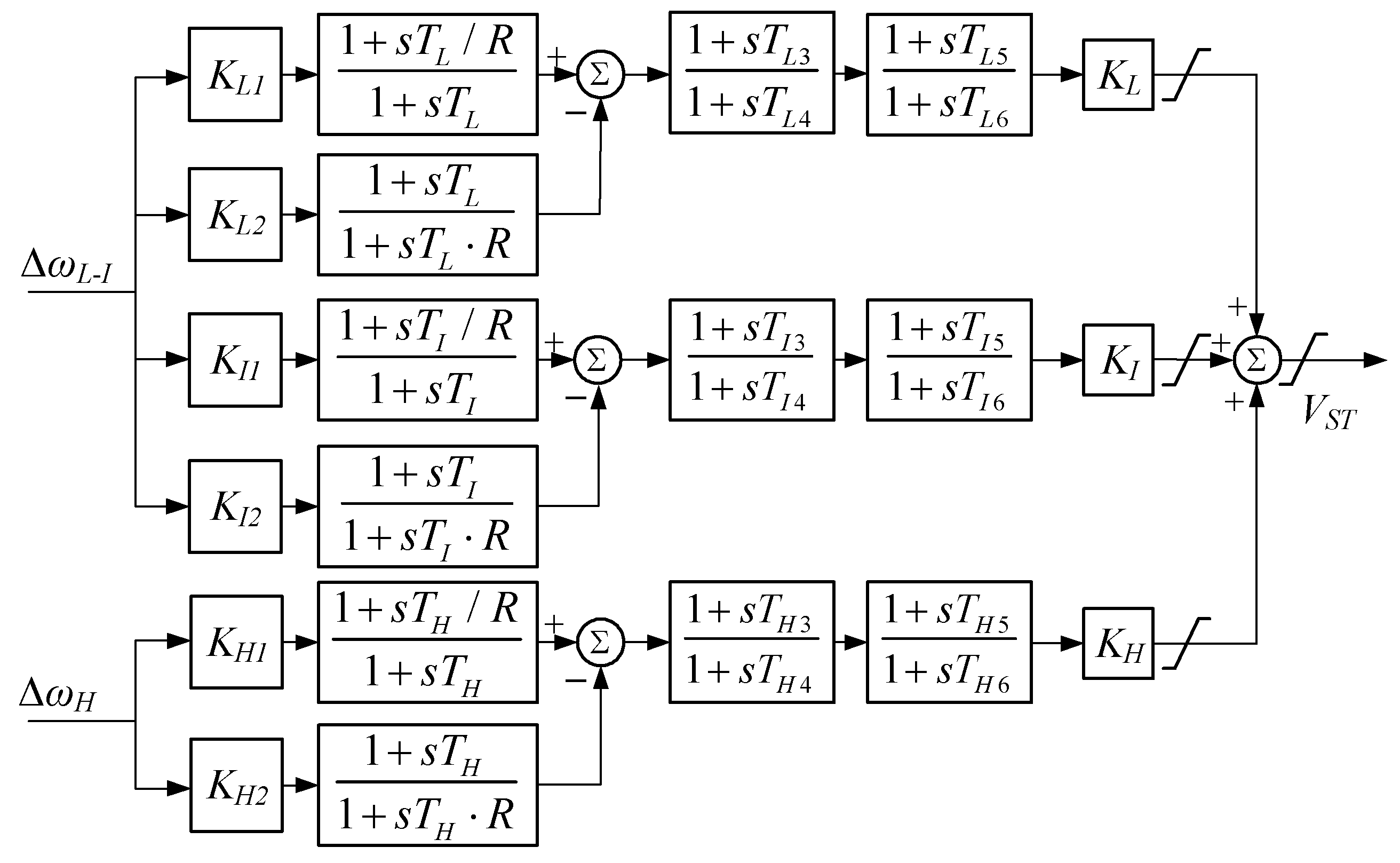
2.2. The Revised Model of PSS4B
3. Iterative Design of PSS4B Stabilizer
3.1. Space Searching Approach
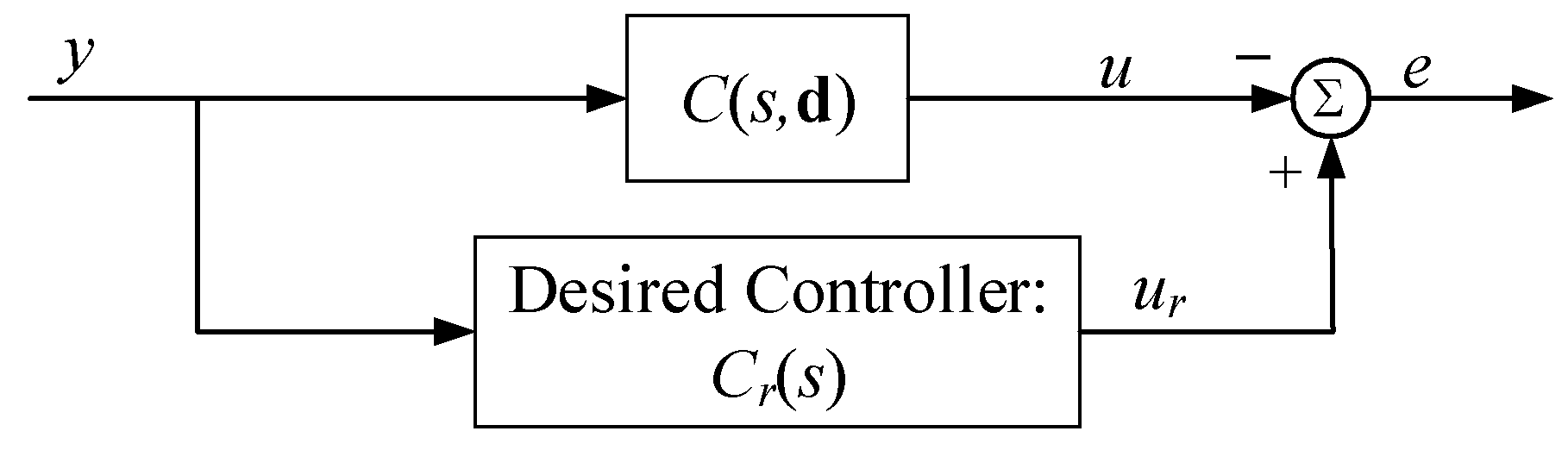
3.2. Contoured Controller Bode Plot
3.2.1. Performance Index
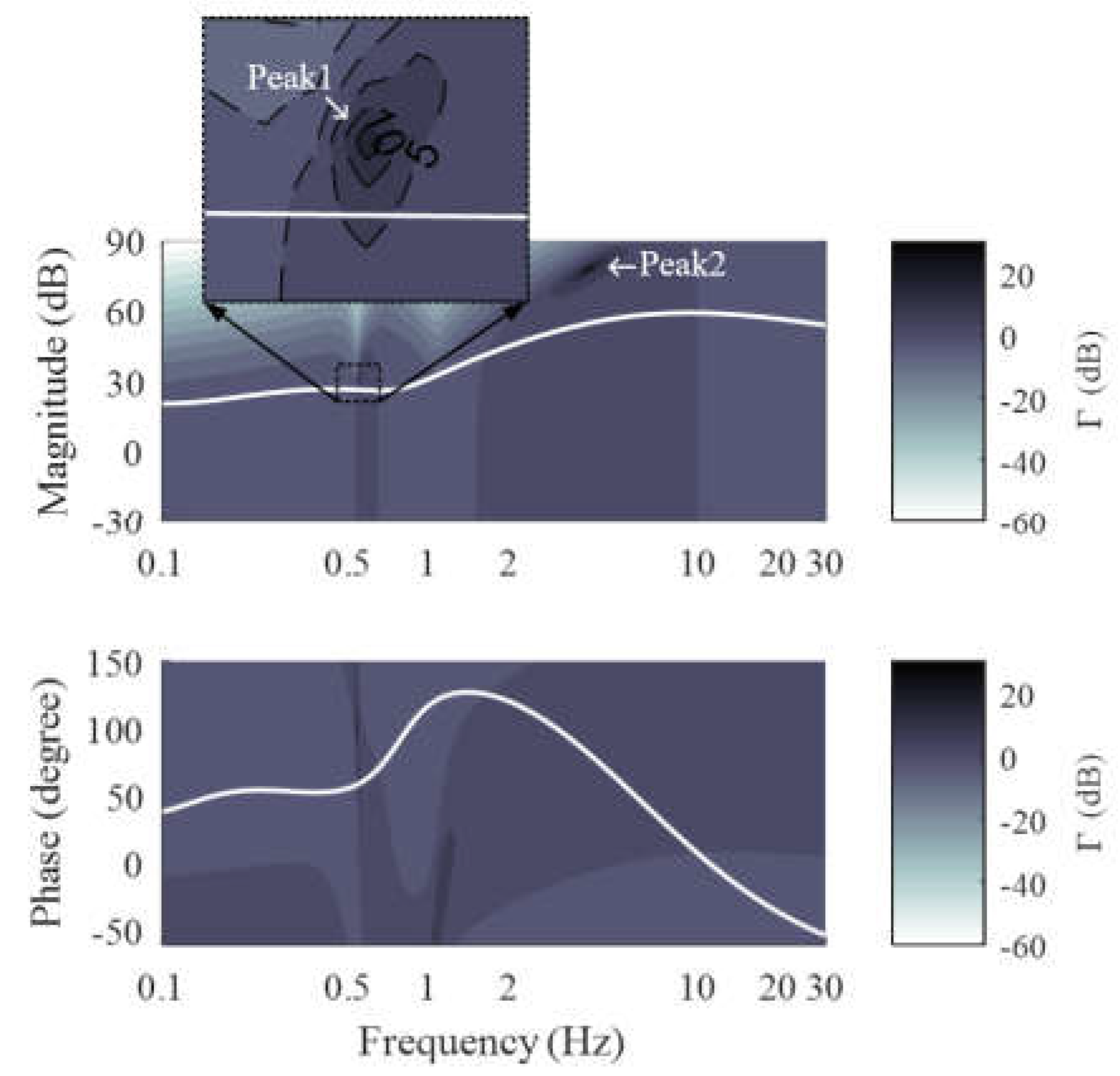
3.2.2. CCBode Plot
3.2.3. CCBode Plot Using Generalized Frequency
3.3. Iterative Design Approach
4. Case Study
4.1. Results of the Four-Machine/Two-Area Test System
- Stabilize the unstable inter-area mode;
- Improve the damping of the local mode;
- Avoid the exciter instability (around 5.5 Hz).
4.2. Results of the North China Power Grid
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Wang, H.; Du, W. Analysis and Damping Control of Power System Low-Frequency Oscillations; Springer: New York, NY, USA, 2016. [Google Scholar]
- Wang, G.; Xin, H.; Gan, D.; Li, N. A probability-one homotopy method for stabilizer parameter tuning. IEEE Trans. Power Syst. 2013, 28, 4624–4633. [Google Scholar] [CrossRef]
- Zhou, J.; Shi, P.; Gan, D.; Xu, Y.; Xin, H.; Jiang, C.; Xie, H.; Wu, T. Large-Scale Power System Robust Stability Analysis Based on Value Set Approach. IEEE Trans. Power Syst. 2017, 32, 4012–4023. [Google Scholar] [CrossRef]
- Grondin, R.; Kamwa, I.; Trudel, G.; Taborda, J.; Lenstroem, R.; Gerin-Lajoie, L.; Gingras, J.P.; Racine, M.; Baumberger, H. The multi-band PSS: A flexible technology designed to meet opening markets. In Cigré General Session 2000; CIGRE: Paris, France, 2000; pp. 39–201. [Google Scholar]
- Grondin, R.; Kamwa, I.; Trudel, G.; Gerin-Lajoie, L.; Taborda, J. Modeling and closed-loop validation of a new PSS concept, the multi-band PSS. In Proceedings of the 2003 IEEE Power Engineering Society General Meeting (IEEE Cat. No.03CH37491), Toronto, ON, Canada, 13–17 July 2003; pp. 1804–1809. [Google Scholar]
- Kamwa, I.; Grondin, R.; Trudel, G. IEEE PSS2B versus PSS4B: The limits of performance of modern power system stabilizers. IEEE Trans. Power Syst. 2005, 20, 903–915. [Google Scholar] [CrossRef]
- Jia, L.; Gao, X.; Xu, Y.; Xie, H.; Wu, T.; Su, W.; Zhou, J.; Gan, D.; Xin, H. Application of PSS4B stabilizers in suppressing low frequency oscillations: A case study. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Blondel, V.; Gevers, M.; Lindquist, A. Survey on the state of systems and control. Eur. J. Control 1995, 1, 5–23. [Google Scholar] [CrossRef]
- Hilhorst, G.; Pipeleers, G.; Michiels, W.; Swevers, J. Sufficient LMI conditions for reduced-order multi-objective H2/H∞ control of LTI systems. Eur. J. Control 2015, 23, 17–25. [Google Scholar] [CrossRef]
- Pagola, F.L.; Perez-Arriaga, I.J.; Verghese, G.C. On sensitivities, residues and participations: Applications to oscillatory stability analysis and control. IEEE Trans. Power Syst. 1989, 4, 278–285. [Google Scholar] [CrossRef] [PubMed]
- Rouco, L.F.; Pagola, F.L. An eigenvalue sensitivity approach to location and controller design of controllable series capacitors for damping power system oscillations. IEEE Trans. Power Syst. 1997, 12, 1660–1666. [Google Scholar] [CrossRef] [PubMed]
- Rouco, L.; Pagola, F.L. Eigenvalue sensitivities for design of power system damping controllers. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No.01CH37228), Orlando, FL, USA, 4–7 December 2001; pp. 3051–3055. [Google Scholar]
- Rimorov, D.; Kamwa, I.; Joós, G. Model-based tuning approach for multi-band power system stabilisers PSS4B using an improved modal performance index. IET Gener. Transm. Distrib. 2015, 9, 2135–2143. [Google Scholar] [CrossRef]
- Wang, Z.; Chung, C.Y.; Wong, K.P.; Tse, C.T. Robust power system stabiliser design under multi-operating conditions using differential evolution. IET Gener. Transm. Distrib. 2008, 2, 690–700. [Google Scholar] [CrossRef]
- Kundur, P.; Lee, D.C.; El-Din, H.Z. Power system stabilizers for thermal units: Analytical techniques and on-site validation. IEEE Trans. Power Appar. Syst. 1981, 1, 81–95. [Google Scholar] [CrossRef]
- Kundur, P.; Klein, M.; Rogers, G.J.; Zywno, M.S. Application of power system stabilizers for enhancement of overall system stability. IEEE Trans. Power Syst. 1989, 4, 614–626. [Google Scholar] [CrossRef]
- Gibbard, M.J.; Vowles, D.J. Reconciliation of methods of compensation for PSSs in multimachine systems. IEEE Trans. Power Syst. 2004, 19, 463–472. [Google Scholar] [CrossRef]
- Rogers, G. Power System Oscillations; Kluwer: Norwell, MA, USA, 2000. [Google Scholar]
- Kundur, P.; Berube, G.R.; Hajagos, L.M.; Beaulieu, R. Practical utility experience with and effective use of power system stabilizers. In Proceedings of the 2003 IEEE Power Engineering Society General Meeting (IEEE Cat. No.03CH37491), Toronto, ON, Canada, 13–17 July 2003; Volume 3, pp. 1777–1785. [Google Scholar]
- Larsen, E.V.; Swann, D.A. Applying power system stabilizers Part III: Practical considerations. IEEE Trans. Power Appar. Syst. 1981, 6, 3034–3046. [Google Scholar] [CrossRef]
- Khadraoui, S.; Nounou, H.N.; Nounou, M.N.; Datta, A.; Bhattacharyya, S.P. A measurement-based approach for designing reduced-order controllers with guaranteed bounded error. Int. J. Control 2013, 86, 1586–1596. [Google Scholar] [CrossRef]
- Xin, H.; Gan, D.; Huang, Z.; Zhuang, K.; Cao, L. Applications of stability-constrained optimal power flow in the East China system. IEEE Trans. Power Syst. 2010, 25, 1423–1433. [Google Scholar]
- Moiseev, S. Universal derivative-free optimization method with quadratic convergence. arXiv 2011, arXiv:1102.1347. [Google Scholar]
- Taylor, J.D.; Messner, W. Controller design for nonlinear systems using the Contoured Robust Controller Bode plot. Int. J. Robust Nonlinear Control 2014, 24, 3196–3213. [Google Scholar] [CrossRef]
- Taylor, J.D.; Messner, W. Controller Design for Nonlinear Multi-Input/Multi-Output Systems Using the Contoured Robust Controller Bode Plot. In Proceedings of the ASME 2013 Dynamic Systems and Control Conference, Palo Alto, CA, USA, 21–23 October 2013. [Google Scholar]
- Ke, D.P.; Chung, C.Y. An inter-area mode oriented pole-shifting method with coordination of control efforts for robust tuning of power oscillation damping controllers. IEEE Trans. Power Syst. 2012, 27, 1422–1432. [Google Scholar] [CrossRef]
- Martins, N. Efficient eigenvalue and frequency response methods applied to power system small-signal stability studies. IEEE Trans. Power Syst. 1986, 1, 217–224. [Google Scholar] [CrossRef]
- Nakhmani, A.; Lichtsinder, M.; Zeheb, E. Generalized Bode envelopes and generalized Nyquist theorem for analysis of uncertain systems. Int. J. Robust Nonlinear Control 2011, 21, 752–767. [Google Scholar] [CrossRef]
- Kamwa, I.; Performance of Three PSS for Interarea Oscillations. Sym-PowerSystems Toolbox. Available online: https://www.mathworks.com/examples/simpower/ (accessed on 1 April 2024).
- IEEE Std 421.5-2016 (Revision of IEEE Std 421.5-2005); IEEE Recommended Practice for Excitation System Models for Power System Stability Studies. IEEE: Piscataway, NJ, USA, 2016; pp. 1–207.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Oscillation Mode | Eigenvalue | Frequency (Hz) | Damping Ratio (%) | |
|---|---|---|---|---|
| None | Inter-area | 0.055 ± j3.39 | 0.54 | −1.62% |
| Local | −0.591 ± j6.68 | 1.06 | 8.81% | |
| PSS4B(1) | Inter-area | 0.020 ± j3.42 | 0.55 | −0.59% |
| Local | −0.912 ± j6.56 | 1.04 | 13.8% | |
| PSS4B(2) | Inter-area | −0.028 ± j3.44 | 0.55 | 0.83% |
| Local | −1.224 ± j6.93 | 1.10 | 17.4% | |
| PSS4B(3) | Inter-area | −0.104 ± j3.47 | 0.55 | 3.00% |
| Local | −1.956 ± j7.13 | 1.14 | 26.4% |
| G1-PSS | Low-Frequency Band | Intermediate-Frequency Band | High-Frequency Band | |||
|---|---|---|---|---|---|---|
| PSS4B(1) | KL | 7.5 | KI | 30 | KH | 120 |
| FL | 0.07 | FI | 0.7 | FH | 8 | |
| TL3 | 0.0531 | TI3 | 0.3876 | TH3 | 0.1652 | |
| TL4 | 0.2447 | TI4 | 0.4723 | TH4 | 0.0555 | |
| TL5 | 0.0531 | TI5 | 0.3876 | TH5 | 0.1652 | |
| TL6 | 0.2447 | TI6 | 0.4723 | TH6 | 0.0555 | |
| PSS4B(2) | KL | 30 | KI | 30 | KH | 10 |
| FL | 0.07 | FI | 0.7 | FH | 8 | |
| TL3 | 0.3489 | TI3 | 0.2212 | TH3 | 0.4836 | |
| TL4 | 0.0902 | TI4 | 0.0017 | TH4 | 0.0362 | |
| TL5 | 0.3489 | TI5 | 0.2212 | TH5 | 0.4836 | |
| TL6 | 0.0902 | TI6 | 0.0017 | TH6 | 0.0362 | |
| PSS4B(3) | KL | 60 | KI | 60 | KH | 20 |
| Other parameters are the same as for PSS4B(2) | ||||||
| Oscillation Mode | Eigenvalue | Frequency (Hz) | Damping Ratio (%) | |
|---|---|---|---|---|
| None | Inter-area 1 | −0.053 ± j2.18 | 0.35 | 2.44% |
| Local 2 | −0.950 ± j9.92 | 1.58 | 9.53% | |
| PSS2B | Inter-area | −0.055 ± j2.18 | 0.35 | 2.52% |
| Local | −2.626 ± j10.03 | 1.60 | 25.31% | |
| PSS4B(4) | Inter-area | −0.063 ± j2.18 | 0.35 | 2.92% |
| Local | −5.962 ± j10.03 | 1.60 | 50.87% | |
| PSS4B(5) | Inter-area | −0.068 ± j2.18 | 0.35 | 3.13% |
| Local | −8.049 ± j10.05 | 1.60 | 62.51% |
| Mengxilai PSS | Low-Frequency Band | Intermediate-Frequency Band | High-Frequency Band | |||
|---|---|---|---|---|---|---|
| PSS4B(4) | KL | 12.6 | KI | 21.7 | KH | 47.6 |
| FL | 0.116 | FI | 0.506 | FH | 12.1 | |
| TL3 | 0.3047 | TI3 | 0.3984 | TH3 | 0.4125 | |
| TL4 | 0.4620 | TI4 | 0.1812 | TH4 | 0.0965 | |
| TL5 | 0.3047 | TI5 | 0.3984 | TH5 | 0.4125 | |
| TL6 | 0.4620 | TI6 | 0.1812 | TH6 | 0.0965 | |
| PSS4B(5) | KL | 18 | KI | 31 | KH | 68 |
| Other parameters are the same as PSS4B(4) | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Jiang, C.; Gan, D. A Contoured Controller Bode-Based Iterative Tuning Method for Multi-Band Power System Stabilizers. Energies 2024, 17, 3243. https://doi.org/10.3390/en17133243
Xu H, Jiang C, Gan D. A Contoured Controller Bode-Based Iterative Tuning Method for Multi-Band Power System Stabilizers. Energies. 2024; 17(13):3243. https://doi.org/10.3390/en17133243
Chicago/Turabian StyleXu, Hao, Chongxi Jiang, and Deqiang Gan. 2024. "A Contoured Controller Bode-Based Iterative Tuning Method for Multi-Band Power System Stabilizers" Energies 17, no. 13: 3243. https://doi.org/10.3390/en17133243