

UAV Inspections of Power Transmission Networks with AI Technology: A Case Study of Lesvos Island in Greece

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. UAV and Sensors Used
2.2. Object Detection Systems
- Single-pass detection: YOLO processes the entire image in a single forward pass through the neural network, as opposed to many traditional object detection methods that use region proposal networks and multiple passes;
- Bounding-box prediction: YOLO divides the input image into a grid and predicts bounding boxes and class probabilities for each grid cell. This allows YOLO to detect objects of different sizes and aspect ratios efficiently;
- High-speed and real-time performance: YOLO is known for its speed and efficiency, making it suitable for real-time applications. It has been widely used in various domains, including surveillance, autonomous vehicles, and robotics;
- Versatility: YOLO can be adapted for different tasks, such as general object detection, person detection, vehicle detection, and more. The architecture is flexible and can be trained on custom datasets for specific applications.
- RPN: Like the Faster R-CNN, the Mask R-CNN utilizes a region proposal network to propose candidate regions in the image that are likely to contain objects;
- Bounding-box prediction: The Mask R-CNN predicts bounding boxes and class labels for each proposed region, similar to the Faster R-CNN;
- Mask prediction: In addition to bounding boxes, the Mask R-CNN introduces a mask prediction branch that outputs segmentation masks for each identified object. This allows for pixel-level accuracy in delineating object boundaries;
- ROI align: To accurately extract pixel-level information for mask prediction, the Mask R-CNN employs ROI Align, a technique that aligns the extracted feature maps with the input image pixels. This helps prevent information loss during the process.
2.3. Defects of the Power Transmission Network
- Electrical-line misalignment: Tilted crossarms can cause electrical-line and associated equipment misalignment. This may lead to issues such as sagging lines, increased conductor tension, and potential electrical faults;
- Mechanical stress and fatigue: The tilt of the poles and crossarms can subject the components to uneven mechanical stress. Over time, this stress can lead to fatigue and accelerate the wear and tear of the materials, increasing the likelihood of structural failure;
- Line clearance and safety hazards: Tilted structures may result in reduced line clearance, increasing the risk of electrical lines coming into contact with surrounding objects, vegetation, or the ground. This poses safety hazards for the public, wildlife, and utility workers;
- Outages. if a pole collapses or lines become damaged due to misalignment, it can disrupt the electrical supply to businesses, homes, and critical infrastructure;
- Increased maintenance costs: Tilted structures necessitate increased maintenance efforts and costs. Regular inspections, corrective actions, and potential replacements may be required to address structural issues and prevent further deterioration;
- Regulatory compliance: Medium-voltage electric structures are subject to regulations and standards. Tilted poles and crossarms may lead to non-compliance with these regulations, inviting penalties or regulatory actions;
- Fire hazards: If tilted structures come close enough to vegetation, there is an increased risk of sparking and fire hazards. This can pose a danger to the environment and nearby structures;
- Environmental impact: the failure of medium-voltage electric structures can have environmental consequences, especially if there are spills of insulating oils or other hazardous materials.
2.4. System Architecture
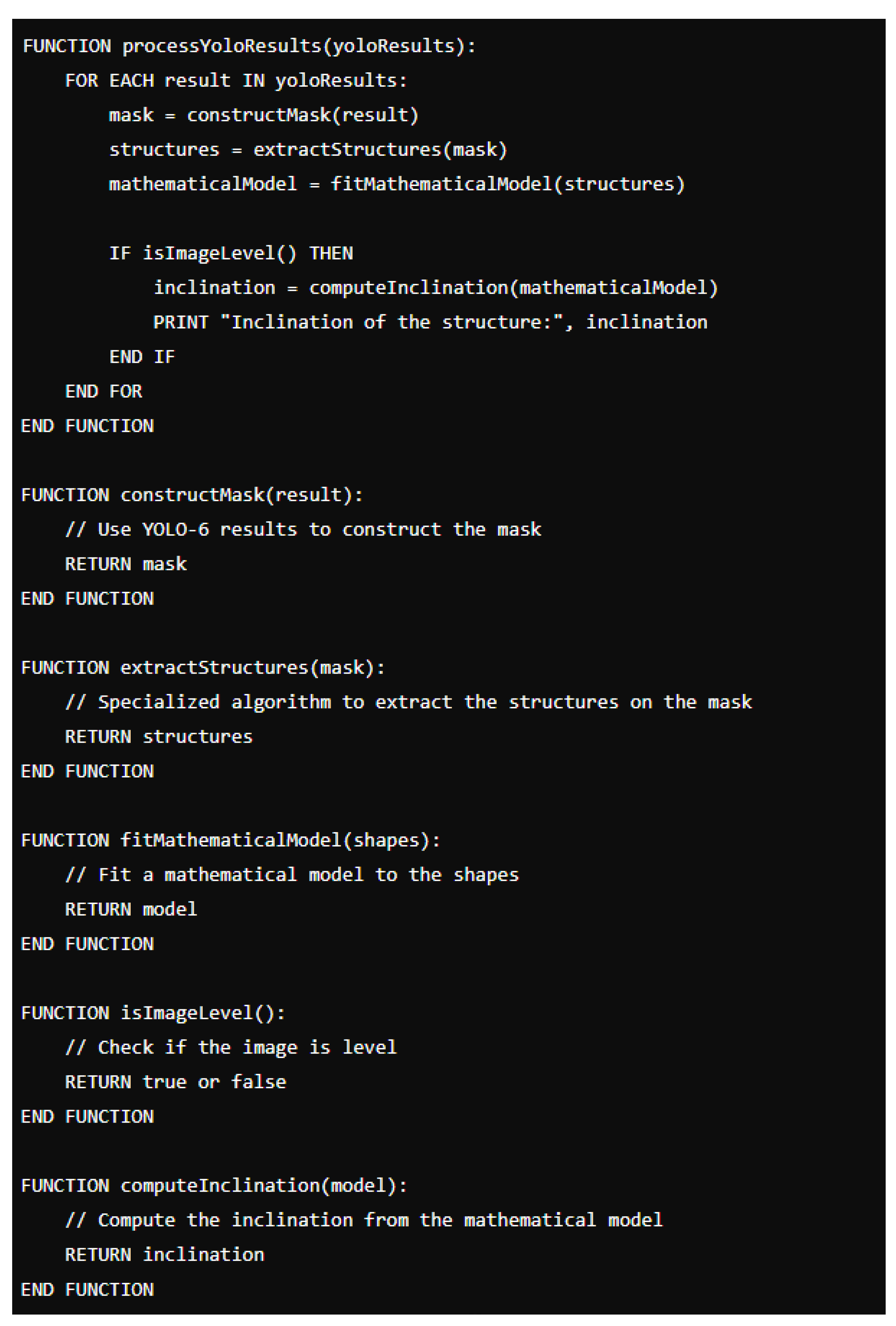
- ProcessYoloResults: the main function that processes the YOLO-6 results:
- Iterates through each YOLO-6 result;
- Constructs a mask from the YOLO-6 result using constructMask;
- Extracts the structures on the mask using extractStructures;
- Fits a mathematical model to the structures using fitMathematicalModel;
- Checks if the image is level using isImageLevel;
- Computes the inclination of the structures from the mathematical model using computeInclination and prints it;
- constructMask: function to construct the mask using YOLO-6 results;
- extractStructures: function for the specialized algorithm to extract the structures on the mask;
- fitMathematicalModel: function to fit a mathematical model to the shapes;
- isImageLevel: function to check whether the image is level;
- computeInclination: function to compute the inclination from the mathematical model.
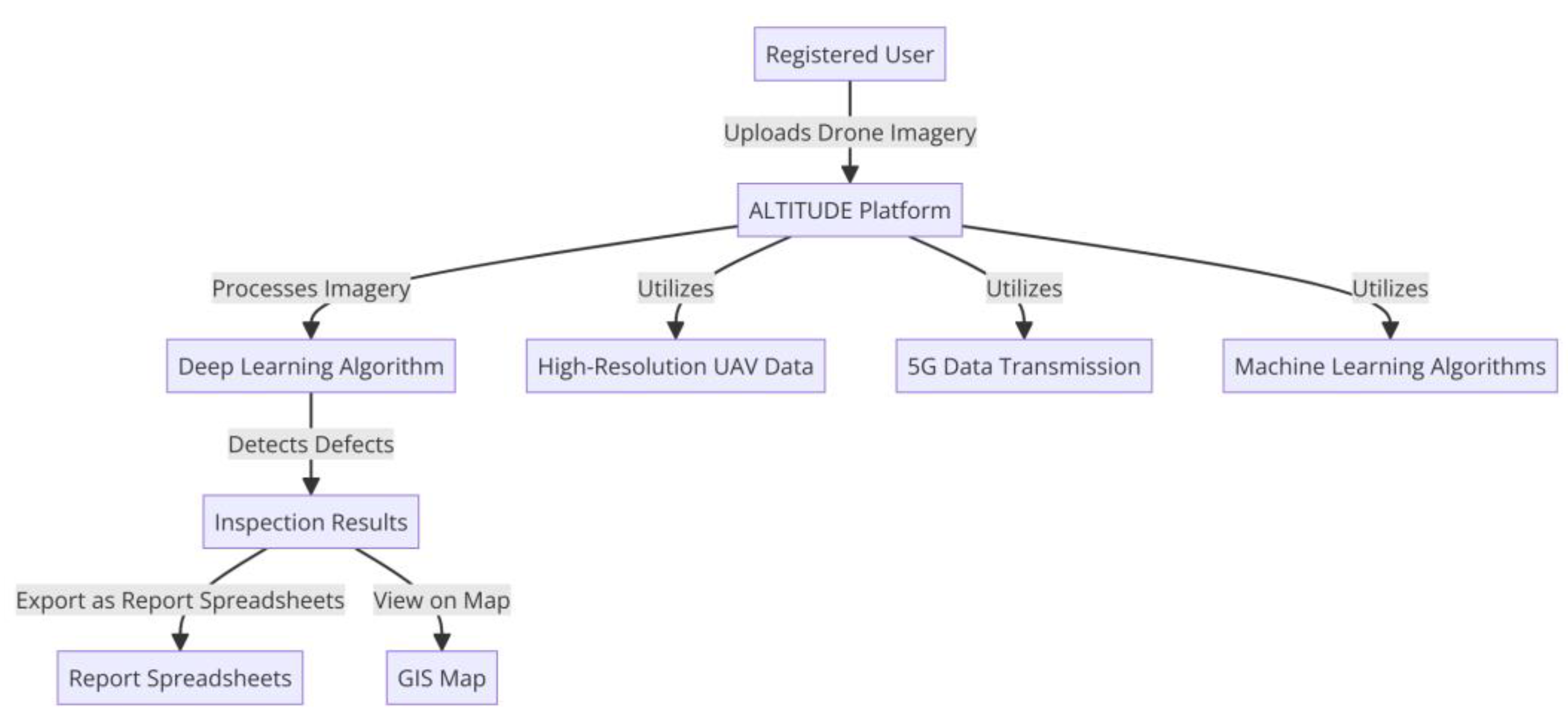
3. ALTITUDE Platform and Results
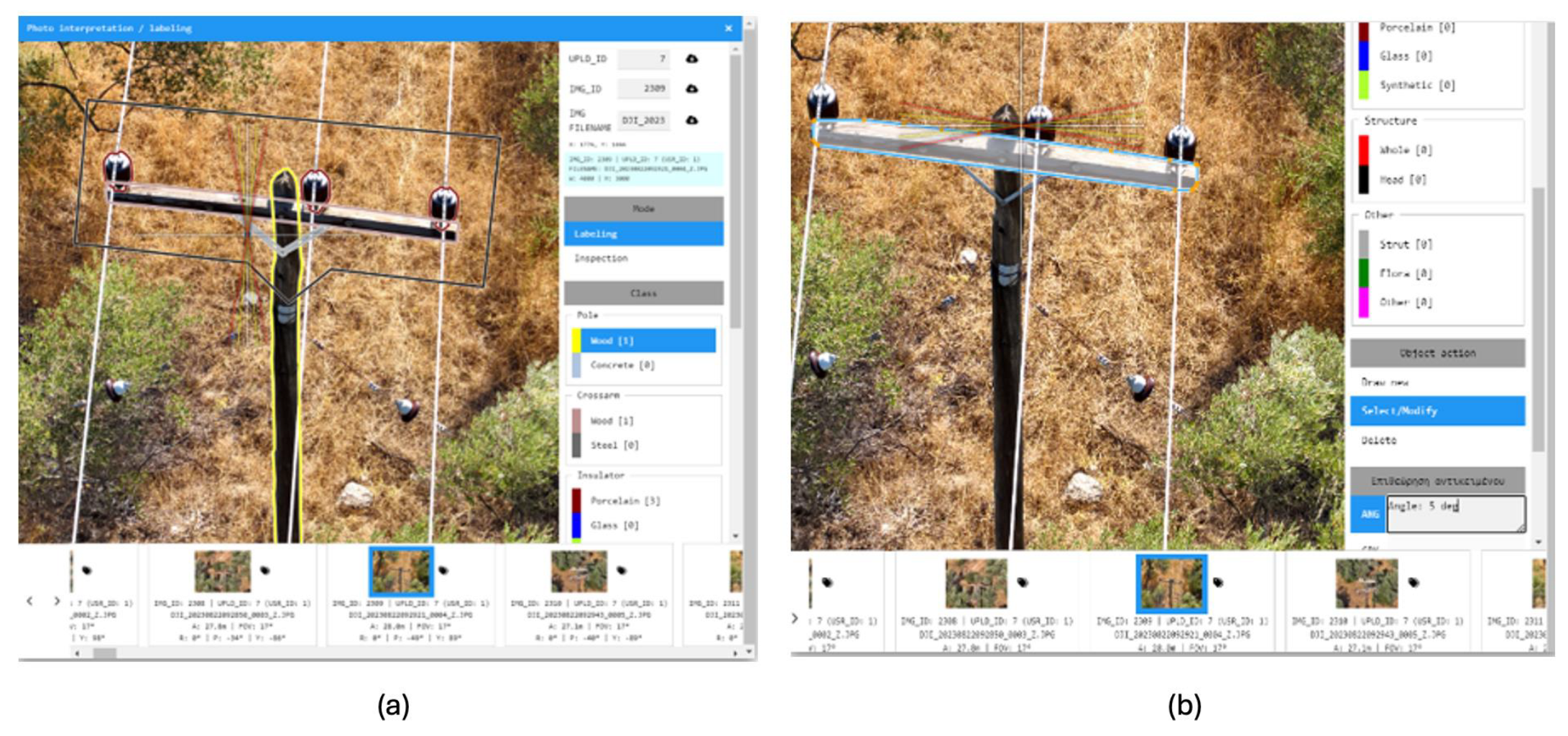
- The ALTITUDE website, responsible for front-end tasks related to mapping, MV network digitization, imagery uploading, AI labeling, AI- or user-based photo interpretation, and inspection reporting;
- The ALTITUDE processing application, responsible for imagery uploading, storage, analysis, and serving; AI training, invocation, storage, and the serving of the resulting findings; user-based photo interpretation and the serving of the resulting defects; and inspection reporting;
- The ALTITUDE database, file system, and map server.
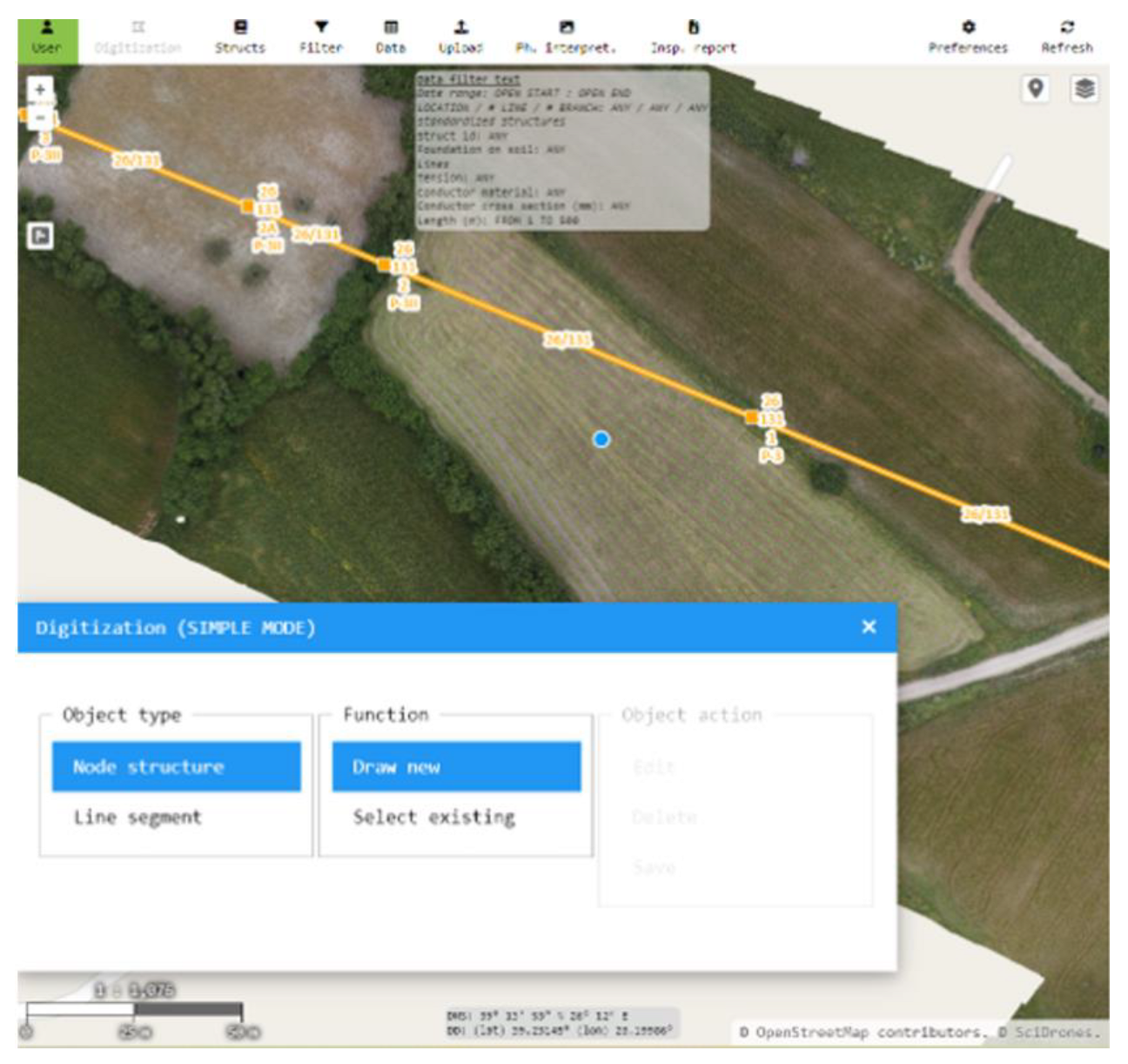
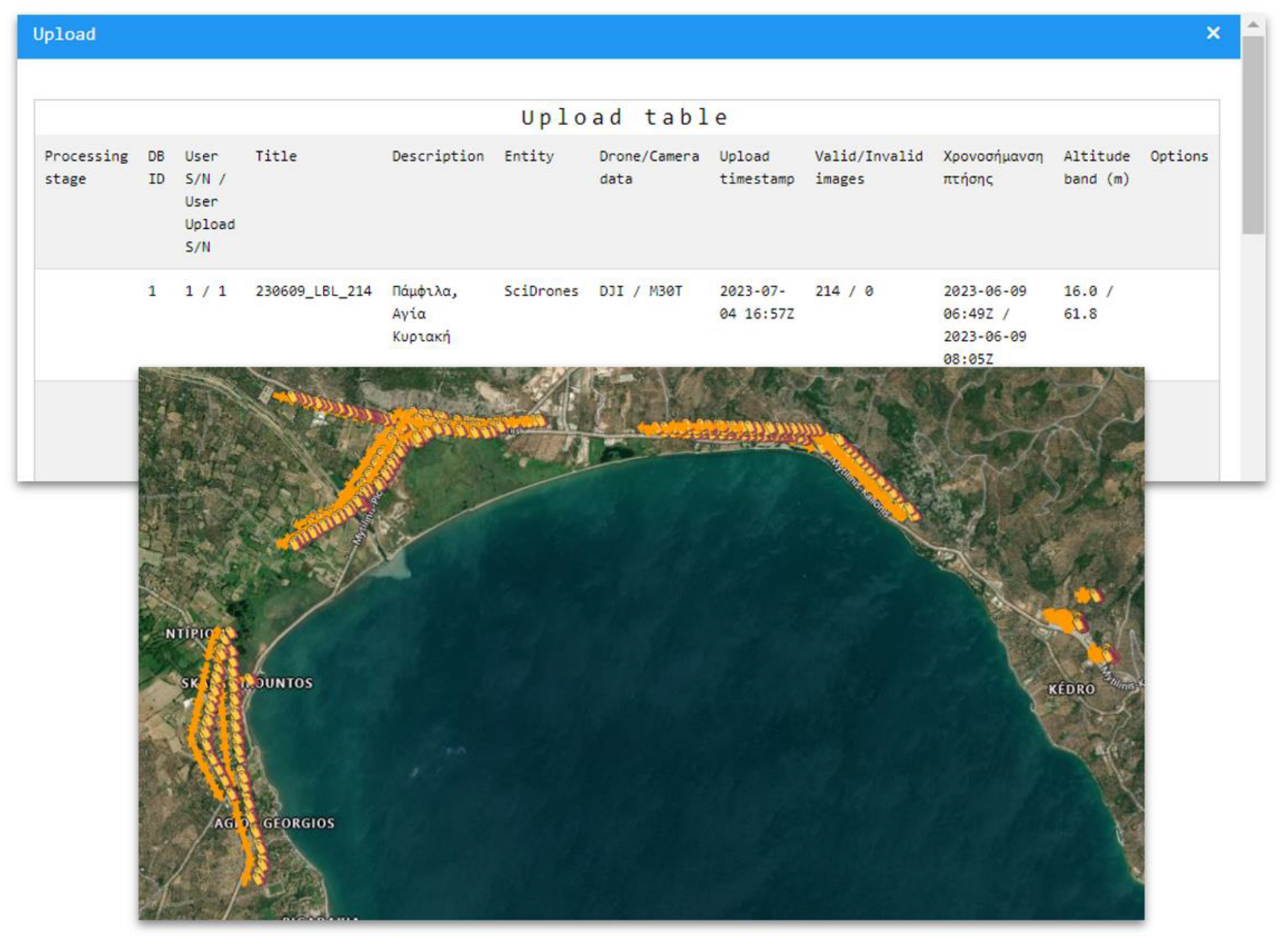
3.1. ALTITUDE Web GIS
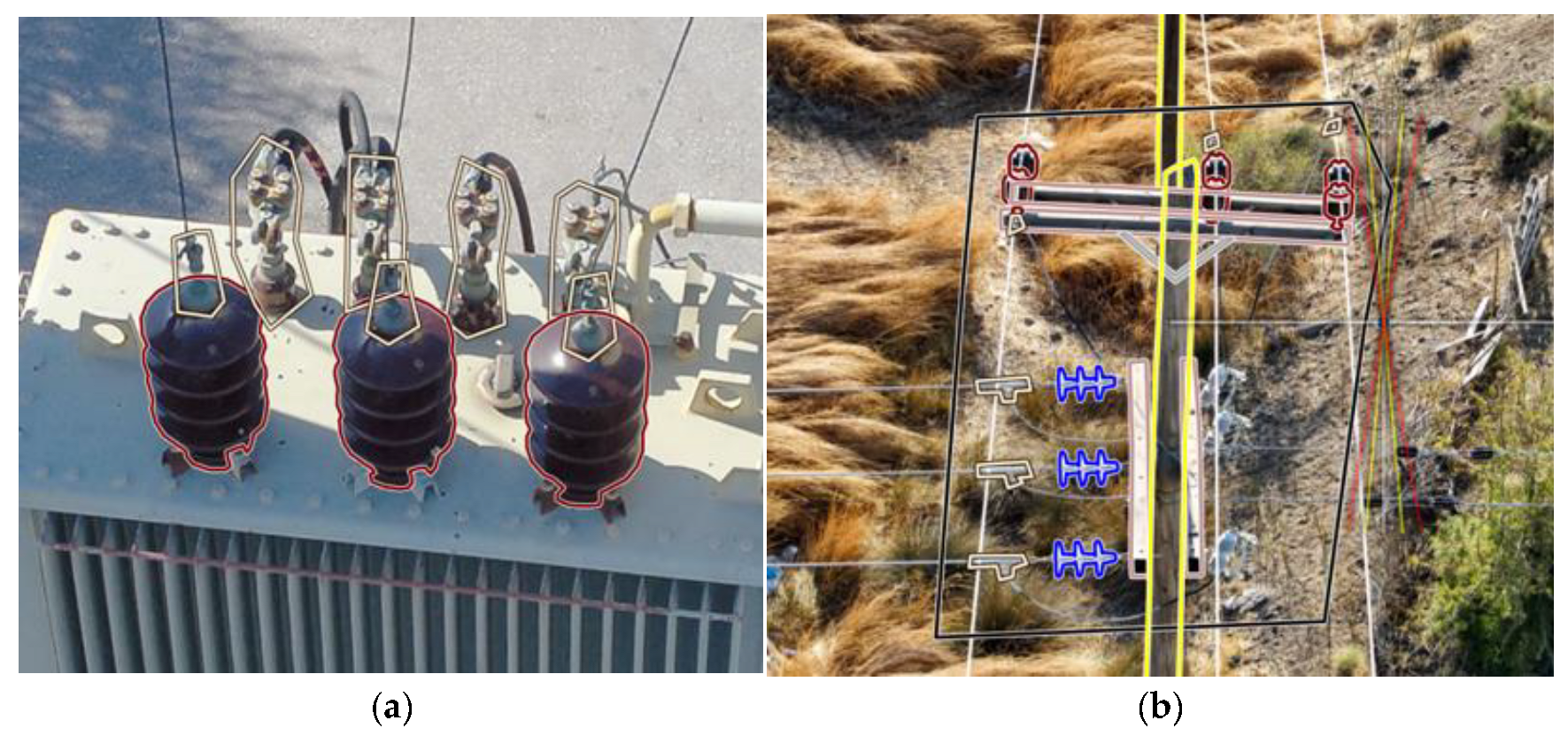
3.2. ALTITUDE Defect Detection Capabilities
- The tilt angles of poles: The system can accurately measure and identify any deviations in the tilt angles of poles. This is crucial because poles that are not perfectly vertical can compromise the structural integrity of the entire system and pose safety hazards;
- The tilt angles of crossarms: The crossarms must maintain precise alignment, like the poles. The ALTITUDE system detects any misalignment or tilting in the crossarms, which are essential components that support the conductors and insulators;
- The tilt angles of pin insulators: the correct positioning of these insulators ensures proper electrical insulation and mechanical stability, and the system detects their tilt angles;
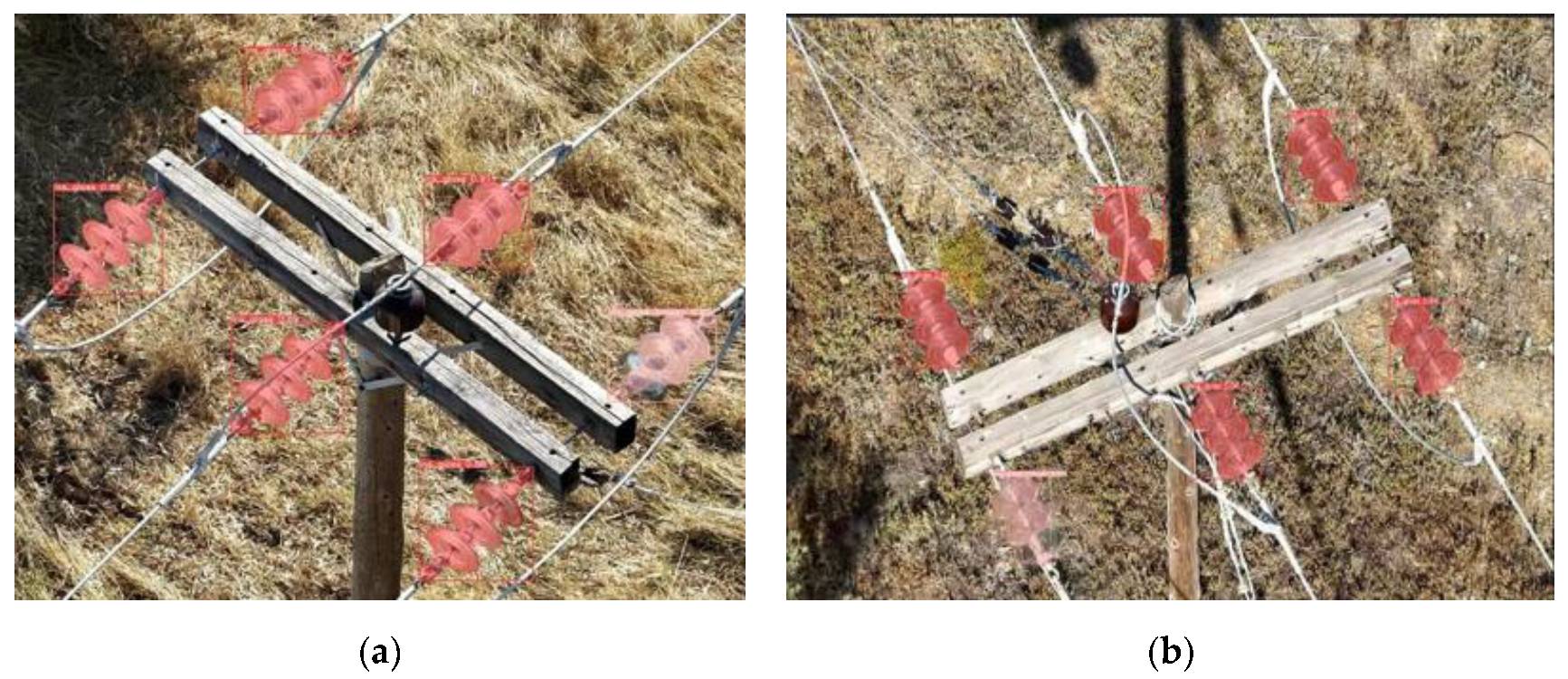
- Missing disks in glass-line insulators: All disks in glass-line insulators are necessary for an optimal insulation performance. The ALTITUDE system can identify missing disks that could otherwise lead to potential failures in the line;
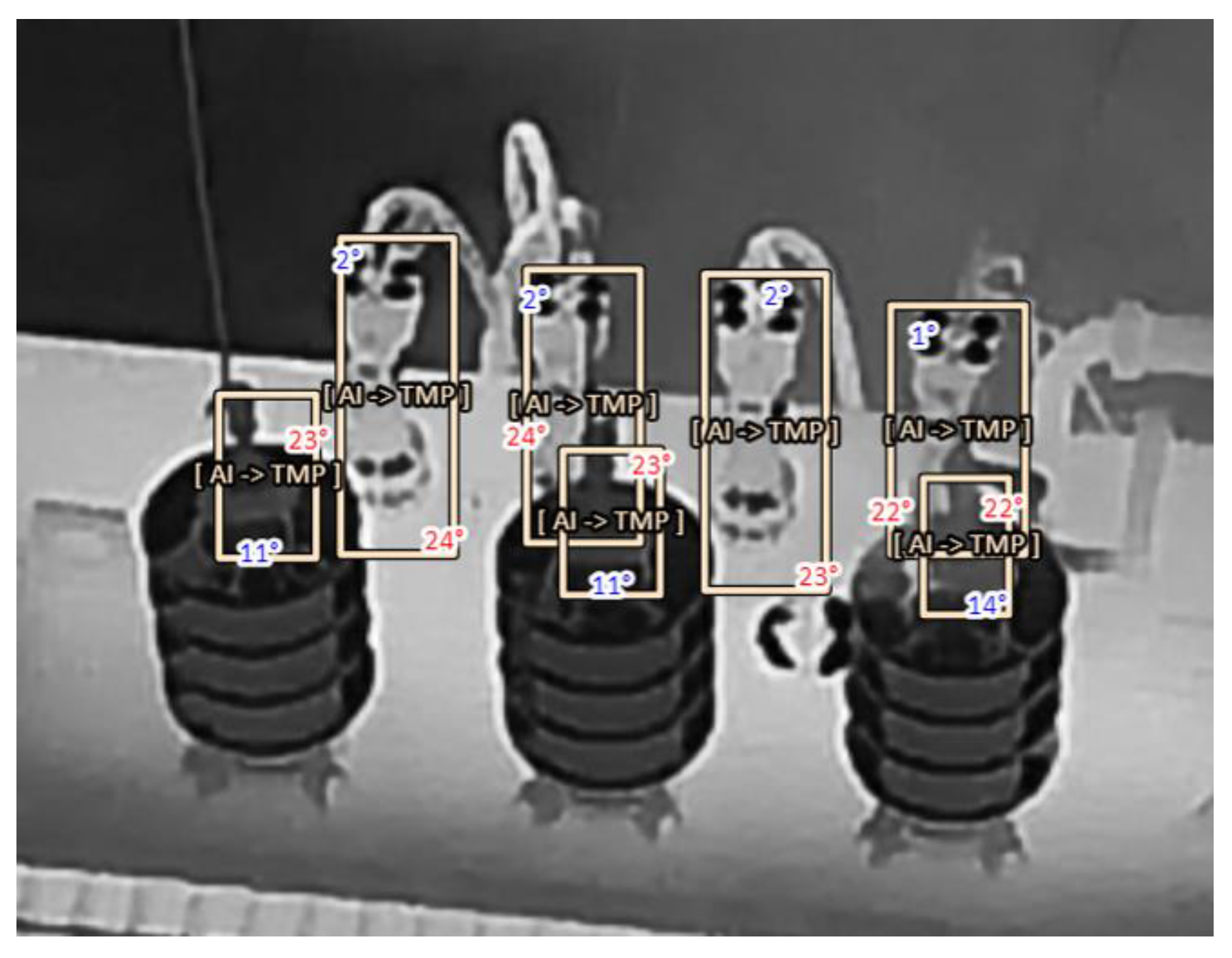
- Overheated insulators: By detecting high temperatures in various components, the system helps identify overheating issues. Overheating can indicate underlying problems, such as excessive electrical loads, poor connections, or deteriorating equipment, which must be addressed promptly to prevent failures and ensure safety.
- Segment (mask) detection: the masks detected are translated into angles to find a possible defect based on the angle and the provided threshold. There is also a subclass used for binary existence, where applicable;
- Bounding-box detection: the boxes detected are translated into thermal-image boxes to extract possible defects based on the provided threshold.
- pole_wood: 0.970: this class represents wooden poles with a performance score of 0.970;
- ca_wood: 0.931: this class represents wooden crossarms with a performance score of 0.931;
- ca_steel: 0.969: this class represents steel crossarms with a performance score of 0.969;
- ins_porc: 0.983: this class represents porcelain insulators with a performance score of 0.983;
- ins_glass: 0.994: this class represents glass insulators with a performance score of 0.994;
- ins_glass_broken: 0.974: this class represents broken glass insulators with a performance score of 0.974;
- ins_syn: 0.900: this class represents synthetic insulators with a performance score of 0.900;
- other_strut: 0.900: this class represents other structural elements with a performance score of 0.900;
- all classes: 0.953 0.953 mAP@0.5: this indicates that the model’s overall performance across all classes, with a mean Average Precision (mAP) threshold of 0.5, is 0.953.
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tsellou, A.; Livanos, G.; Ramnalis, D.; Polychronos, V.; Plokamakis, G.; Zervakis, M.; Moirogiorgou, K. A UAV Intelligent System for Greek Power Lines Monitoring. Sensors 2023, 23, 8441. [Google Scholar] [CrossRef]
- Zormpas, A.; Moirogiorgou, K.; Kalaitzakis, K.; Plokamakis, G.; Partsinevelos, P.; Giakos, G.; Zervakis, M. Power Transmission Lines Inspection using Properly Equipped Unmanned Aerial Vehicle (UAV). In Proceedings of the 2018 IEEE International Conference on Imaging Systems and Techniques (IST), Krakow, Poland, 16–18 October 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, B.; Zhao, Y.; Wang, T.; Chen, Q. Development of power transmission line detection technology based on unmanned aerial vehicle image vision. SN Appl. Sci. 2023, 5, 72. [Google Scholar] [CrossRef]
- Jalil, B.; Leone, G.R.; Martinelli, M.; Moroni, D.; Pascali, M.A.; Berton, A. Fault Detection in Power Equipment via an Unmanned Aerial System Using Multi Modal Data. Sensors 2019, 19, 3014. [Google Scholar] [CrossRef]
- Savva, A.; Zacharia, A.; Makrigiorgis, R.; Anastasiou, A.; Kyrkou, C.; Kolios, P.; Panayiotou, C.; Theocharides, T. ICARUS: Automatic Autonomous Power Infrastructure Inspection with UAVs. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 918–926. [Google Scholar] [CrossRef]
- Yan, G.; Li, C.; Zhou, G.; Zhang, W.; Li, X. Automatic Extraction of Power Lines From Aerial Images. IEEE Geosci. Remote Sens. Lett. 2007, 4, 387–391. [Google Scholar] [CrossRef]
- Kim, S.; Kim, D.; Jeong, S.; Ham, J.-W.; Lee, J.-K.; Oh, K.-Y. Fault Diagnosis of Power Transmission Lines Using a UAV-Mounted Smart Inspection System. IEEE Access 2020, 8, 149999–150009. [Google Scholar] [CrossRef]
- Yang, L.; Fan, J.; Liu, Y.; Li, E.; Peng, J.; Liang, Z. A Review on State-of-the-Art Power Line Inspection Techniques. IEEE Trans. Instrum. Meas. 2020, 69, 9350–9365. [Google Scholar] [CrossRef]
- Surantha, N.; Iwao, T.; Ren, Z.; Morishita, H. Digital Transformation on Power Transmission Line Inspection using Autonomous Drone and Deep Learning. In Proceedings of the 2nd International Conference on Robotics, Automation and Artificial Intelligence (RAAI), Singapore, 9–11 December 2022; pp. 80–86. [Google Scholar] [CrossRef]
- Xie, X.; Liu, Z.; Xu, C.; Zhang, Y. A Multiple Sensors Platform Method for Power Line Inspection Based on a Large Unmanned Helicopter. Sensors 2017, 6, 1222. [Google Scholar] [CrossRef]
- Katrasnik, J.; Pernus, F.; Likar, B. A Survey of Mobile Robots for Distribution Power Line Inspection. IEEE Trans. Power Deliv. 2010, 25, 485–493. [Google Scholar] [CrossRef]
- Li, Z.; Liu, Y.; Walker, R.; Hayward, R.; Zhang, J. Towards automatic power line detection for a UAV surveillance system using pulse coupled neural filter and an improved Hough transform. Mach. Vis. Appl. 2010, 21, 677–686. [Google Scholar] [CrossRef]
- Li, X.; Li, Z.; Wang, H.; Li, W. Unmanned Aerial Vehicle for Transmission Line Inspection: Status, Standardization, and Perspectives. Front. Energy Res. 2021, 9, 713634. [Google Scholar] [CrossRef]
- Schofield, O.B.; Iversen, N.; Ebeid, E. Autonomous power line detection and tracking system using UAVs. Microprocess. Microsyst. 2022, 94, 104609. [Google Scholar] [CrossRef]
- Fan, B.; Li, Y.; Zhang, R.; Fu, Q. Review on the Technological Development and Application of UAV Systems. Chin. J. Electron. 2020, 29, 199–207. [Google Scholar] [CrossRef]
- Zhao, H.; Zhou, Y.; Zhang, L.; Hu, X.; Peng, H.; Cai, X. Mixed YOLOv3-LITE: A lightweight real-time object detection method. Sensors 2020, 7, 1861. [Google Scholar] [CrossRef]
- Liu, M.; Wang, X.; Zhou, A.; Fu, X.; Ma, Y.; Piao, C. UAV-YOLO: Small Object Detection on Unmanned Aerial Vehicle Perspective. Sensors 2020, 20, 2238. [Google Scholar] [CrossRef] [PubMed]
- Hoang, M.L. Smart Drone Surveillance System Based on AI and on IoT Communication in Case of Intrusion and Fire Accident. Drones 2023, 7, 694. [Google Scholar] [CrossRef]
- Rahaman, F.M. The Current Trends of Object Detection Algorithms: A Review. Available online: https://www.researchgate.net/publication/373392107_The_Current_Trends_of_Object_Detection_Algorithms_A_Review (accessed on 28 March 2024).
- McEnroe, P.; Wang, S.; Liyanage, M. A survey on the convergence of edge computing and AI for UAVs: Opportunities and challenges. IEEE Internet Things J. 2022, 9, 15435–15459. [Google Scholar] [CrossRef]
- Siddiqui, Z.A.; Park, U. A Drone Based Transmission Line Components Inspection System with Deep Learning Technique. Energies 2020, 13, 3348. [Google Scholar] [CrossRef]
- Maduako, I.; Igwe, C.F.; Abah, J.E.; Onwuasaanya, O.E.; Chukwu, G.A.; Ezeji, F.; Okeke, F.I. Deep learning for component fault detection in electricity transmission lines. J. Big Data 2022, 9, 81. [Google Scholar] [CrossRef]
- Tao, X.; Zhang, D.; Wang, Z.; Liu, X.; Zhang, H.; Xu, D. Detection of Power Line Insulator Defects Using Aerial Images Analyzed With Convolutional Neural Networks. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1486–1498. [Google Scholar] [CrossRef]
- Huang, Y.; Jiang, L.; Han, T.; Xu, S.; Liu, Y.; Fu, J. High-Accuracy Insulator Defect Detection for Overhead Transmission Lines Based on Improved YOLOv5. Appl. Sci. 2022, 12, 12682. [Google Scholar] [CrossRef]
- Zheng, J.; Wu, H.; Zhang, H.; Wang, Z.; Xu, W. Insulator-Defect Detection Algorithm Based on Improved YOLOv7. Sensors 2022, 22, 8801. [Google Scholar] [CrossRef]
- Ling, Z.; Zhang, D.; Qiu, R.C.; Jin, Z.; Zhang, Y.; He, X.; Liu, H. An accurate and real-time method of self-blast glass insulator location based on faster R-CNN and U-net with aerial images. CSEE J. Power Energy Syst. 2019, 5, 474–482. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhen, Z.; Zhang, L.; Qi, Y.; Kong, Y.; Zhang, K. Insulator Detection Method in Inspection Image Based on Improved Faster R-CNN. Energies 2019, 12, 1204. [Google Scholar] [CrossRef]
- Hosseini, M.M.; Umunnakwe, A.; Parvania, M.; Tasdizen, T. Intelligent Damage Classification and Estimation in Power Distribution Poles Using Unmanned Aerial Vehicles and Convolutional Neural Networks. IEEE Trans. Smart Grid 2020, 11, 3325–3333. [Google Scholar] [CrossRef]
- Song, L.; Li, X.; Zhu, S.; Choy, Y. Cascade ensemble learning for multi-level reliability evaluation. Aerosp. Sci. Technol. 2024, 148, 109101. [Google Scholar] [CrossRef]
- DJI Enterprise. Available online: https://enterprise.dji.com/matrice-300 (accessed on 28 March 2024).
- DJI Enterprise. Available online: https://enterprise.dji.com/matrice-30 (accessed on 28 March 2024).
- DJI. Available online: https://www.dji.com/gr/downloads/djiapp/dji-pilot (accessed on 28 March 2024).
- SPH Engineering. Available online: https://www.sphengineering.com/flight-planning/ugcs (accessed on 28 March 2024).
- Diwan, T.; Anirudh, G.; Tembhurne, J.V. Object detection using YOLO: Challenges, architectural successors, datasets and applications. Multimed Tools Appl. 2023, 82, 9243–9275. [Google Scholar] [CrossRef] [PubMed]
- Fang, S.; Zhang, B.; Hu, J. Improved Mask R-CNN Multi-Target Detection and Segmentation for Autonomous Driving in Complex Scenes. Sensors 2023, 23, 3853. [Google Scholar] [CrossRef]
- Wang, G.; Chen, Y.; An, P.; Hong, H.; Hu, J.; Huang, T. UAV-YOLOv8: A Small-Object-Detection Model Based on Improved YOLOv8 for UAV Aerial Photography Scenarios. Sensors 2023, 23, 7190. [Google Scholar] [CrossRef]
- Afdhal, A.; Saddami, K.; Sugiarto, S.; Fuadi, Z.; Nasaruddin, N. Real-Time Object Detection Performance of YOLOv8 Models for Self-Driving Cars in a Mixed Traffic Environment. In Proceedings of the 2nd International Conference on Computer System, Information Technology, and Electrical Engineering (COSITE), Banda Aceh, Indonesia, 2–3 August 2023; pp. 260–265. [Google Scholar] [CrossRef]
- Oberweger, M.; Wendel, A.; Bischof, H. Visual recognition and fault detection for power line insulators. In Proceedings of the 19th Computer Vision Winter Workshop (CVWW), Křtiny, Czech Republic, 3–5 February 2014; pp. 81–88. [Google Scholar]
- Zhang, Z.; Huang, S.; Li, Y.; Li, H.; Hao, H. Image Detection of Insulator Defects Based on Morphological Processing and Deep Learning. Energies 2022, 15, 2465. [Google Scholar] [CrossRef]
- Díaz, M.W.; Cáceres, J.J. A novel application of drones: Thermal diagnosis of electrical and telecommunications infrastructure. In Proceedings of the 2018 IEEE 38th Central America and Panama Convention (CONCAPAN XXXVIII), San Salvador, El Salvador, 7–9 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, H.; Zhang, Z.; Zhao, K.; Chen, Y. An automatic diagnostic method of abnormal heat defect in transmission lines based on infrared video. In Proceedings of the 2016 IEEE PES 13th International Conference on Transmission & Distribution Construction, Operation & Live-Line Maintenance (ESMO), Columbus, OH, USA, 12–15 September 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Taqi, A.; Beryozkina, S. Overhead Transmission Line Thermographic Inspection Using a Drone. In Proceedings of the 2019 IEEE 10th GCC Conference & Exhibition (GCC), Kuwait, Kuwait, 19–23 April 2019; pp. 1–6. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chatzargyros, G.; Papakonstantinou, A.; Kotoula, V.; Stimoniaris, D.; Tsiamitros, D. UAV Inspections of Power Transmission Networks with AI Technology: A Case Study of Lesvos Island in Greece. Energies 2024, 17, 3518. https://doi.org/10.3390/en17143518
Chatzargyros G, Papakonstantinou A, Kotoula V, Stimoniaris D, Tsiamitros D. UAV Inspections of Power Transmission Networks with AI Technology: A Case Study of Lesvos Island in Greece. Energies. 2024; 17(14):3518. https://doi.org/10.3390/en17143518
Chicago/Turabian StyleChatzargyros, Georgios, Apostolos Papakonstantinou, Vasiliki Kotoula, Dimitrios Stimoniaris, and Dimitrios Tsiamitros. 2024. "UAV Inspections of Power Transmission Networks with AI Technology: A Case Study of Lesvos Island in Greece" Energies 17, no. 14: 3518. https://doi.org/10.3390/en17143518
APA StyleChatzargyros, G., Papakonstantinou, A., Kotoula, V., Stimoniaris, D., & Tsiamitros, D. (2024). UAV Inspections of Power Transmission Networks with AI Technology: A Case Study of Lesvos Island in Greece. Energies, 17(14), 3518. https://doi.org/10.3390/en17143518