Abstract
The following article presents a proprietary real-time localization system using temporal analysis techniques and detection and localization algorithms supported by machine learning mechanisms. It covers both the technological aspects, such as proprietary electronics, and the overall architecture of the system for managing human and fixed assets. Its origins lie in the ever-increasing degree of automation in the management of company processes and the energy optimization associated with reducing the execution time of tasks in an intelligent building supported by in-building navigation. The positioning and tracking of objects in the presented system was realized using ultra-wideband radio tag technology. An exceptional focus has been placed on reducing the energy requirements of the components in order to maximize battery runtime, generate savings in terms of more efficient management of other energy consumers in the building and increase the equipment’s overall lifespan.
1. Introduction
The widespread use of wireless technologies allows for the rapid transmission of data between various devices, including the ubiquitous Internet of Things (IoT) sensors. Indoor location appears to be a by-product of wireless technologies, but a very useful one, with numerous applications in commercial buildings, for navigation purposes and management systems. Various radio protocols are used for indoor positioning. Protocols such as Bluetooth, ZigBee, Wi-Fi, LoRa, or the ultra-wideband (UWB) can be mentioned here [1,2,3].
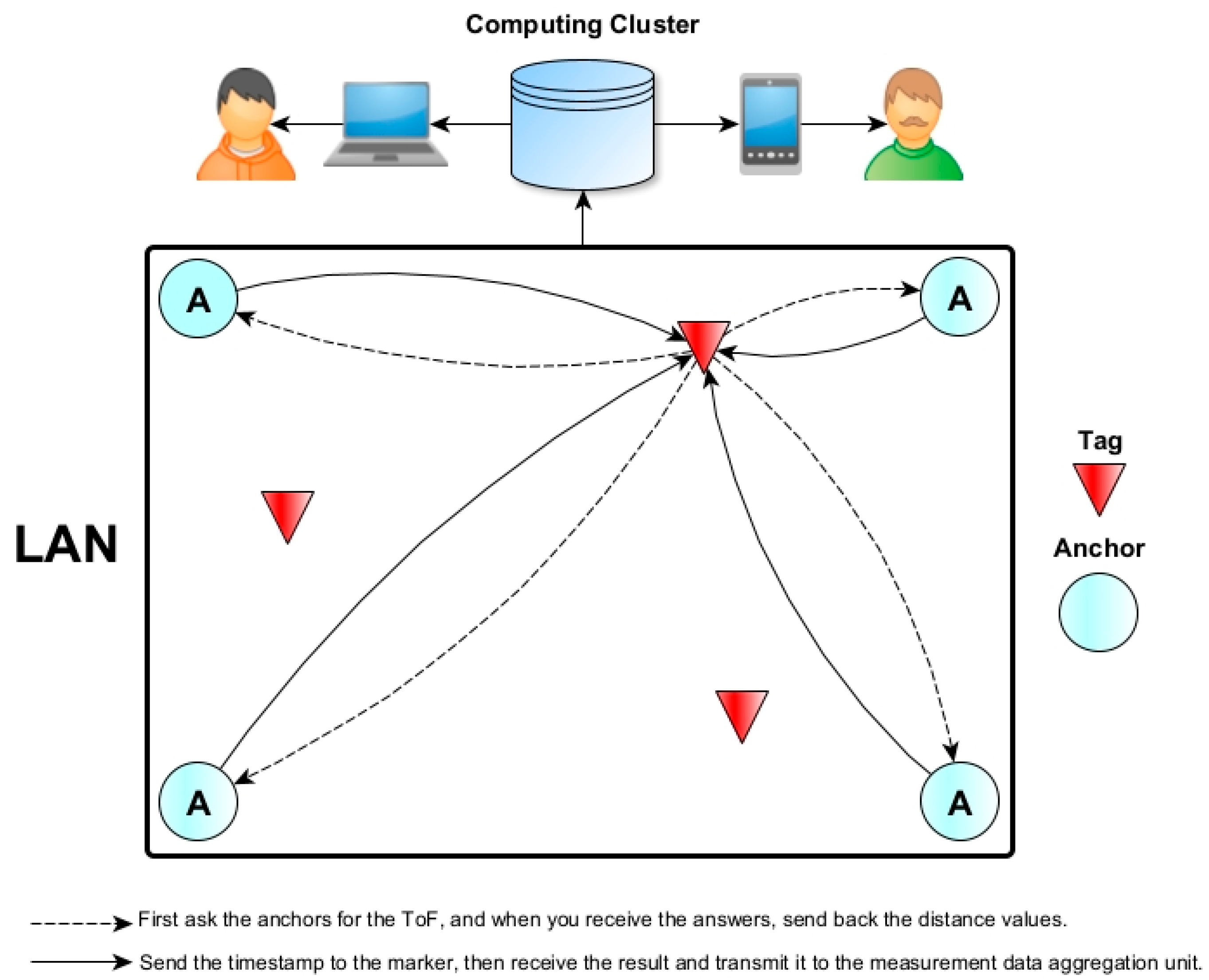
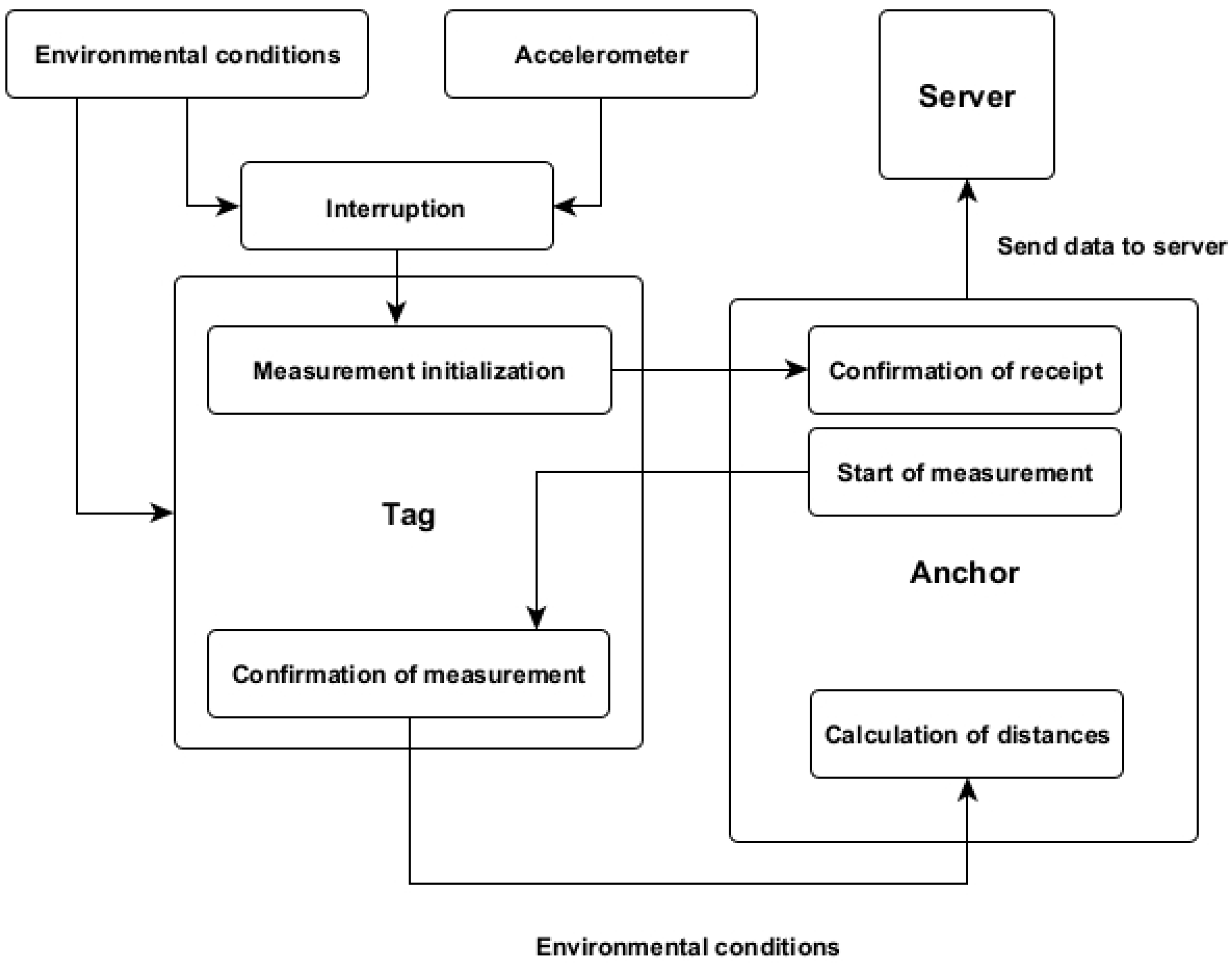
The implementation presented, is designed for goods positioning systems in warehouse management. It uses temporal analysis techniques such as ToF (Time of Flight) in combination with UWB (Ultra-WideBand) transmitter technology, whose hallmarks are exceptional accuracy in determining the distance between two devices and resistance to interference compared to transmission analysis methods [4,5]. The motivation for addressing the topic was the rapidly growing segment of UWB devices, the proliferation of which in recent years has enabled their successive implementation of this technology in an increasing number of systems. Nevertheless, its potential remains untapped in terms of location accuracy (single centimetres) or general compatibility with other types of systems. Existing devices on the market today are often designed to operate within the device pool of a single manufacturer and base their functionality solely on the radio layer. The development of the device and its combination with various machine learning algorithms was intended not only to improve the accuracy of the location, but also the complementarity of the functions performed in relation to the large-scale warehouse management market. In addition, the entire hardware layer produced was designed and manufactured in-house using as many elementary/fundamental solutions as possible. This provided the opportunity to look for a hardware layer, every aspect of which could be tailored to a specific industry. The established device network includes two proprietary hardware solutions. One is the equivalent of a UWB tag in the system, while the other is a UWB anchor. For the system to detect and track an object, the network requires a set of at least one tag and three anchors [6,7]. As the number of tags increases, the load on the system increases. When the number of anchors increases, this usually involves expanding the area covered by the observation and improving the accuracy of the marker location [8]. The equipment set up in this way can orient objects in space. At precise moments, the tags force the anchors to interact by exchanging communication packets containing time stamps. Based on these, the devices can calculate the distance separating them [9]. The distance information is returned to the anchors, which have a permanent and direct connection to the building’s local network. In this way, the information acquired by the devices is fed into the computing cluster and processed by proprietary algorithms. The Cartesian coordinates of the objects are returned, which are applied in real-time to the 3D visualization of the building. The described methodology of operation is shown symbolically in Figure 1. A detailed block diagram of the operation of the marker-anchor pair is presented in Figure 2.
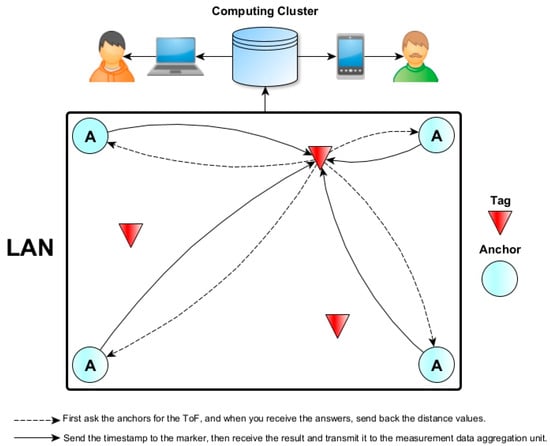
Figure 1.
Idea of time-of-flight analysis in an object positioning system using ultra-wideband tags.
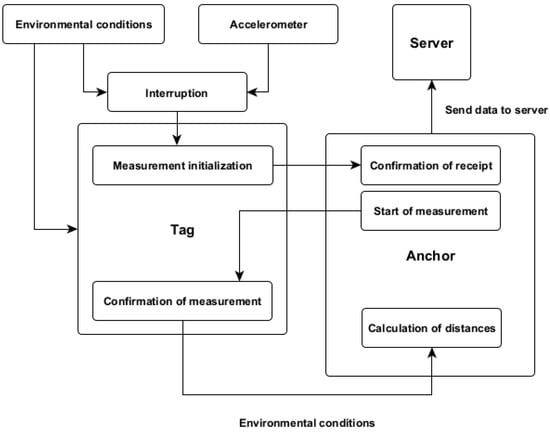
Figure 2.
The idea of time-of-flight analysis in an object positioning system using ultra-wideband tags.
The visualizations generated by the system, together with the objects/goods being tracked, can be displayed as part of the service on personal computers, tablets, or smartphones. Such a solution is primarily intended to support the management of fixed assets and stored goods but in such a way as to contribute to optimizing the operation of the facility in terms of energy (ecology) and time (efficiency) [10,11]. Energy-saving mechanisms also result not only from the system itself, but also from the hardware solutions used in the proprietary devices. These solutions will be discussed in the chapter on the applied hardware layer. In addition to a number of advantages, the system presented posed some design and construction challenges along with them.
The main focus has been on eliminating or compensating for defects due to signal distortion resulting from reflections and refractions when passing between two media with different permeabilities (e.g., air-wall) and relatively higher (e.g., about Bluetooth or ZigBee) energy requirements [12,13]. In the first case, this can result in localization errors after a distance measurement of ±30 cm. With a technology tracking accuracy of up to 10 cm (potential), such a tolerance is unacceptable. Due to this fact, a set of proprietary algorithms has been developed to stabilize the results obtained in this way and thus increase measurement precision and reliability. In UWB localization, various algorithms are employed to accurately estimate a device’s position. The selection of an algorithm depends on factors such as the specific UWB system architecture, environmental conditions, and the desired level of accuracy. One of the fundamental techniques is multilateration/trilateration, which utilizes geometric principles to calculate the device’s position based on distance measurements from multiple anchors. This method serves as a foundational algorithm in UWB localization due to its simplicity and widespread use [14].
Weighted Least Squares (WLS) is another commonly used algorithm, leveraging optimization techniques to minimize the sum of squared errors. Often used in conjunction with trilateration, WLS enhances accuracy, particularly in scenarios with noisy measurements [15]. Maximum Likelihood Estimation (MLE) is a statistical approach that estimates parameters by maximizing the likelihood function [16,17]. This technique proves useful for modeling and estimating the statistical distribution of UWB measurements, contributing to improved accuracy.
Probabilistic methods like Particle Filters are effective in dynamic and non-linear environments [18,19]. These filters use a set of particles to represent possible system states and update them based on measurements. Kalman Filtering, a recursive algorithm, is suitable for real-time UWB localization, especially in dynamic environments [20,21]. It can be integrated into sensor fusion frameworks for enhanced accuracy.
Machine learning methodologies have gained widespread adoption across a spectrum of localization-centric solutions. While machine learning has found extensive application in computer tomography (CT), its utilization in UWB localization further underscores its versatility and expanding reach [22,23]. Advanced pattern recognition and classification techniques, such as k-nearest neighbors (KNN), support vector machines (SVM), and neural networks, are finding increasing applications in UWB localization. This is particularly valuable in fingerprint based UWB systems, where machine learning can adapt to changing environmental conditions [24,25,26].
Mitigating errors caused by non-line-of-sight conditions is crucial in UWB localization. Specialized algorithms address these challenges, improving reliability in scenarios where direct line-of-sight measurements are difficult to achieve. Additionally, Time-Difference of Arrival (TDoA) algorithms play a key role, converting time differences into distance estimates in UWB systems with multiple anchors.
The methodology articulated in this treatise introduces a semi-supervised machine learning paradigm that, in terms of precision, is comparable to the prevailing state-of-the-art achievements in object localization.
2. Materials and Methods
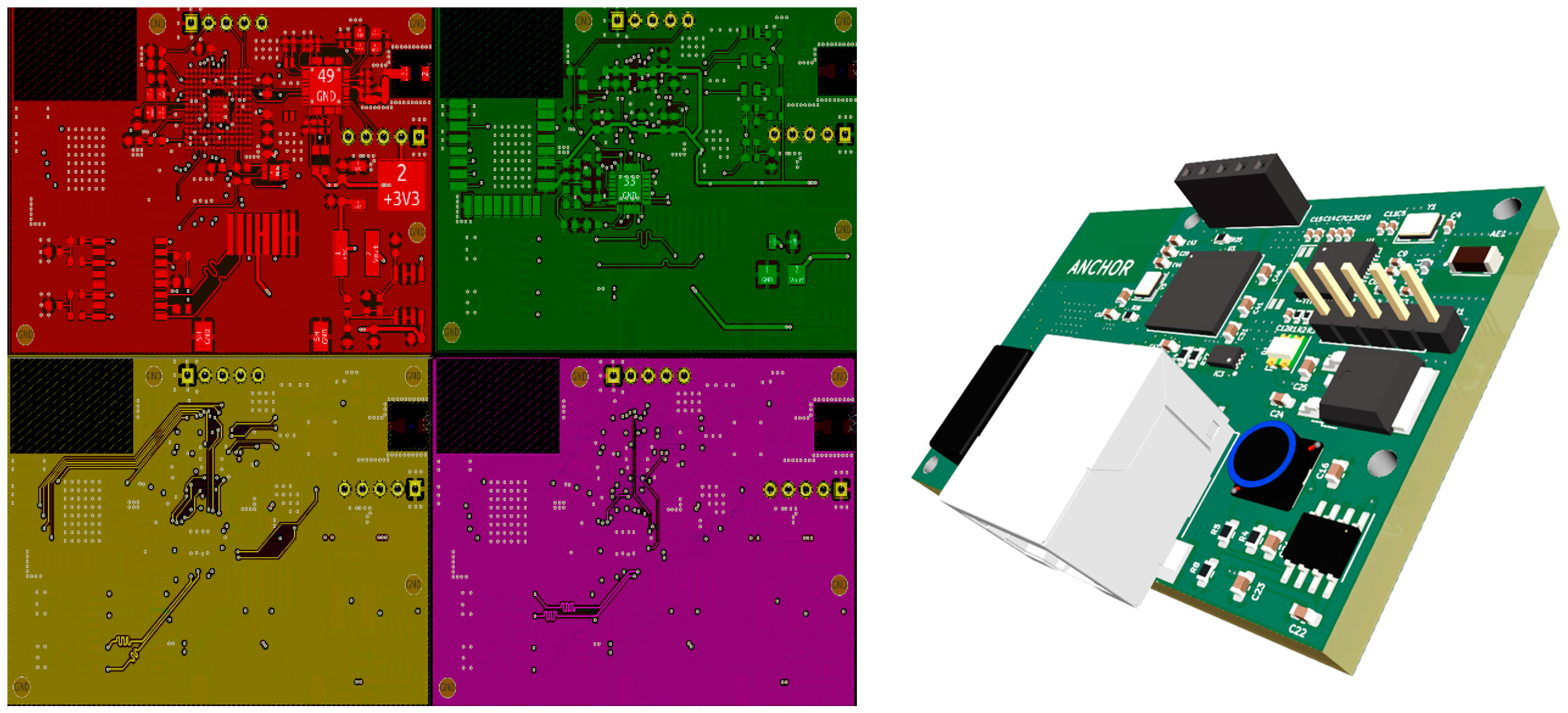
For the system, two fundamental devices were designed from the ground up and realized, between which there is a kind of synergy. Unlike transmission methods, they cannot be considered simplistically as transmitter and receiver, as both devices actively use two-way communication. The tag and the anchor have been made with a particular focus on energy efficiency and miniaturization to maximize their range of applications in different market sectors [27]. The UWB anchor seen in Figure 3 will be presented first.
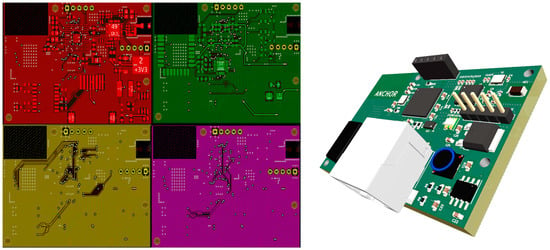
Figure 3.
Mosaic of electrical connections (left) and three-dimensional visualization (right) of the author’s ultra-wideband anchor.
For the anchor, a proprietary UWB transceiver solution was designed and fabricated with dimensions of 61 mm (width) × 41 mm (length) × 1.6 mm (overall thickness) and a thickness of 1/2 oz copper alone. Thanks to its surface area of 25 cm2, the anchor can be installed almost anywhere, e.g., in an installation box. The anchor combines a DWM1000 ultra-wideband transceiver chip with an STM32F746IGK6 microcontroller and an ICS1894 Ethernet controller. In addition, the board is equipped with a transformer-based pairing of the signals going in and out of the stack. Power is provided by a PoE (Power over Ethernet) module. This ensures that both signals and power are supplied via the same full-size RJ-45 connector. This saves PCB space and allows for simple installation using standard twisted-pair signal cable stretched as part of the construction of any modern building [16]. As an alternative control source, an nRF52832 microcontroller compatible with wireless communication protocols such as IEEE 802.15.1, IEEE 802.15.4 or ANT can be used. Due to the anchor’s unit load, the widely known and readily available PoE power supply allows multiple devices to be powered simultaneously from a single power supply. This prompt simplifying the power distribution system and integrating additional devices into the building switchgear. This involves mounting the power supply in a DIN-rail cabinet.
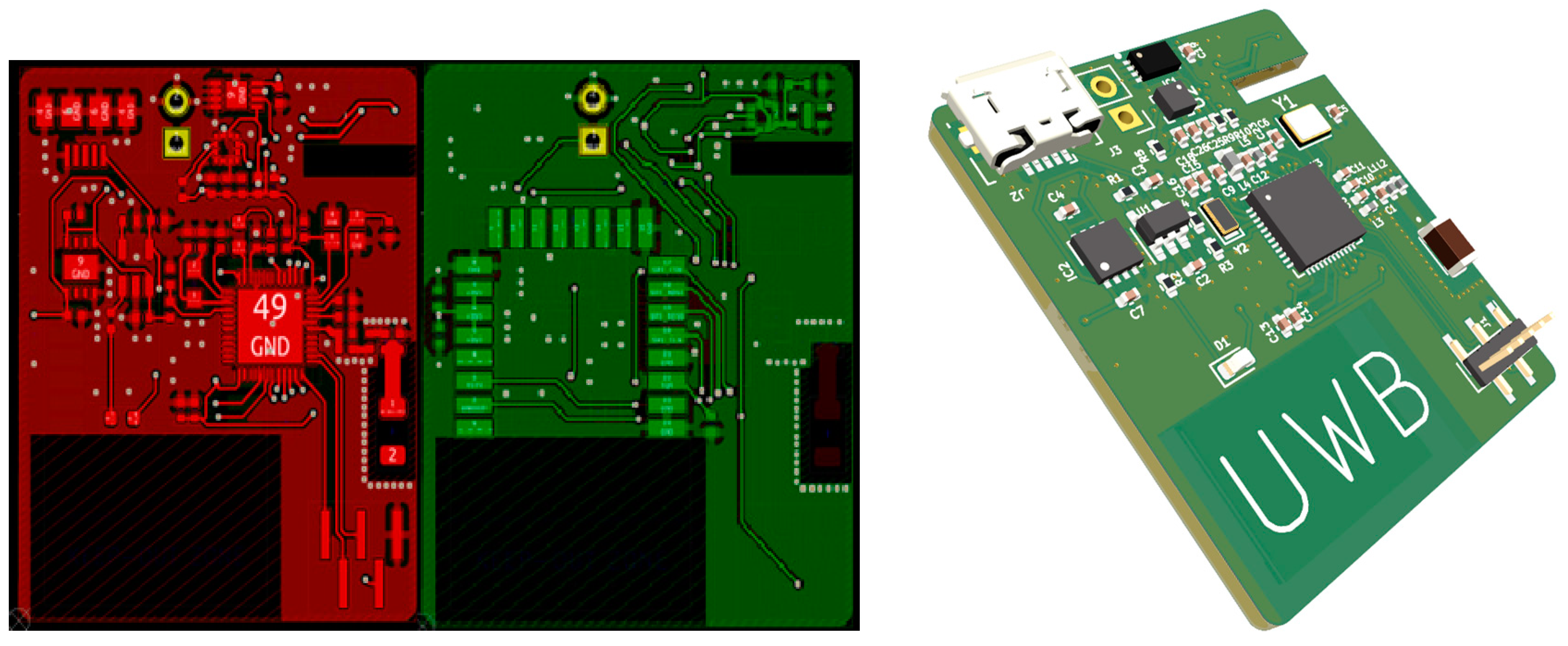
Conversely, the ultra-wideband marker is a device whose size will determine its bonding capabilities with the details (etching agents/commodities). For this reason, the design measures 36 mm (width) × 26 mm (height) × 1.6 mm (overall thickness) and has a copper thickness of 1/2 oz. This translates into a surface area of just under 9.4 cm2. This represents a reduction in size of more than 60 percent compared to the anchor, which is intended to allow the marker to be easily and quickly attached to even the smallest objects being tracked. The appearance of the marker is presented in Figure 4. The presented marker can be combined with many types of cells, but the optimal choice will be a Li-Po cell with a geometric size that is less than or equal to the designed PCB. This will roughly correspond to a battery with a capacity oscillating around the 1000 mAh value. To extend the operating time in battery mode, marker trip conditioning was introduced in the PCB design. The conditioning was implemented in the form of a 3-axis accelerometer (MC3413). As with the anchor, the circuit responsible for transmitting the ultra-wideband signals was the DWM1000 radio chip. The request conditioning, in this case, is based on the crossing of the tripping threshold at which the system is considered to be at rest. Based on the acceleration measured periodically in three axes, it became possible to excite the device in well-defined situations.
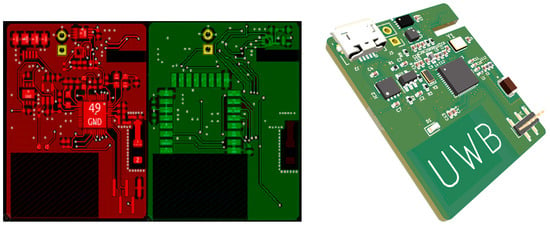
Figure 4.
Mosaic of electrical connections (left) and three-dimensional visualization (right) of the author’s ultra-wideband tag.
The spectrum of serviceable scenarios is endless in this, from environments filled with heavy vibration-inducing equipment to areas completely free of interference. The setting is stored in the nRF52832 wireless microcontroller, and the physical connection was realized via a low-power variant of the I2C interface. In addition, the design has been enhanced to support other sensors used to monitor environmental parameters for optimal storage of goods. In this case, such sensors are thermometers (SHTC3/LPS22DFTR), hygrometers (SHTC3), and pressure (LPS22DFTR) gauges. This solution allows an individual approach to each load. This is important in view of the fact that, for example, despite a common warehouse as a facility, the conditions in the different parts of the warehouse can differ significantly. Another argument can be the differing requirements for the storage of the goods. The set of acquired parameters is thus aggregated in the microcontroller’s memory and cyclically sent via a protocol compliant with IEEE 802.15.1 (Bluetooth Low Energy) to the nearest access point with access to the object’s local network. To protect configuration data and key measurement data, both devices (anchor and marker) were equipped with FRAM-type non-volatile memories (MB85RC16PN/G/AMERE-1).
The abbreviated algorithm of the system using the presented hardware layer assumes that the accelerometer located in the tag is excited by a motion stimulus, and then an activation signal is sent by the digital layer of the accelerometer to the microcontroller controlling the operation of the radio layer (nRF52832) via the I2C bus. The microcontroller then initialises the transmission of the UWB signal to nearby anchors via the SPI bus. When the signal from a given anchor returns to the tag, the distance is calculated based on the time parameters and the speed of light in the medium (in this case, air). The finished distance data together with additional data describing the environmental parameters are sent back to the anchor, where in turn the data from the front-end RF UWB is transported via the SPI bus to the STM microcontroller with Cortex-M core. The environmental data, in turn, goes into the storage history for the purpose of controlling the storage status of the load. This may involve generating a damage risk warning or exclusion for information purposes. Once the data has been reprocessed, the location of users or assets is presented to the user in graphical form via a dedicated application.
The methods employed in this study are integral to achieving precise and robust localization in ultra-wideband (UWB) positioning. We present a comprehensive overview of two distinct yet complementary approaches: Machine Learning Enhanced Trilateration (MLET) and Localization by Optimization (LBO). These methodologies were developed with the primary objective of enhancing the stability and continuity of localization processes.
The initial benchmark for our investigation is the standard trilateration algorithm, which serves as a baseline reference against which the performance of the developed solutions is evaluated [27]. Subsequently, we introduce MLET, a novel algorithm that harnesses the power of machine learning to refine trilateration. This method involves formulating circle equations based on the distances between pair anchors, with the intersections providing precise transmitter locations. The Density-Based Spatial Clustering of Applications with Noise (DBSCAN) algorithm ensures robustness by effectively differentiating relevant points from outliers [28].
In contrast, the LBO approach leverages an optimization paradigm, where an objective function is minimized to yield accurate solutions. We detail the construction of the objective function, involving residuals derived from the comparison between measured and theoretical distances. This approach offers an alternative means of determining the transmitter’s position by identifying the global minimum of the objective function through various optimization methods.
The ensuing sections delve into the intricacies of each method, elucidating the underlying principles, implementation details, and the rationale behind their application. Through a comparative analysis, we aim to comprehensively understand the strengths and limitations of MLET and LBO in the context of UWB localization.
The MLET (Machine Learning Enhanced Trilateration) algorithm starts with the collection of distance measurements from UWB (Ultra-WideBand) anchors to a mobile transmitter device. This involves a meticulous process of synchronizing and calibrating UWB devices to ensure that the data collected is both precise and reliable. The accuracy and consistency of this data are paramount, as they form the foundational dataset upon which the MLET algorithm operates. Advanced synchronization mechanisms are employed to ensure that all measurements are taken within the same time frame, thus avoiding temporal discrepancies that could affect the accuracy of the localization.
Following the data collection, the next phase involves preprocessing the data to enhance its quality. This step includes sophisticated techniques for noise reduction and the identification and removal of outliers. Statistical filtering methods are applied to smooth out the data, reducing the impact of random noise. Anomaly detection algorithms are also utilized to identify and eliminate data points that deviate significantly from the expected range, ensuring that the dataset used for further analysis is robust and reliable. This preprocessing phase is crucial for minimizing errors and ensuring that the subsequent steps are based on high-quality data.
Once the data is preprocessed, the next step involves the formulation of circle equations based on the distance measurements obtained from pairs of anchors. These equations are pivotal in determining the potential intersections that signify the transmitter’s location. Each pair of anchors forms a unique set of circles, and the precise calculation of these intersections is essential for accurate localization. The process involves solving these circle equations to find the points where the circles intersect, which represent potential locations of the transmitter.
The core innovation of the MLET method lies in its use of the DBSCAN (Density-Based Spatial Clustering of Applications with Noise) algorithm to differentiate between relevant intersections and outliers. DBSCAN is employed to effectively cluster the intersection points, distinguishing relevant location data from noise. This clustering technique is essential in isolating accurate intersections and discarding outliers, significantly enhancing the reliability and precision of the localization system. The implementation details of DBSCAN include careful parameter selection and optimization to achieve the best results. By fine-tuning these parameters, the algorithm can better adapt to the specific characteristics of the dataset, ensuring optimal clustering performance.
Finally, the validation process of the MLET algorithm involves rigorous testing with cross-validation techniques across different datasets. This step ensures the robustness and accuracy of the algorithm under various real-world scenarios. The cross-validation process involves dividing the dataset into multiple subsets, training the algorithm on some subsets while testing it on others. This method helps in evaluating the algorithm’s performance comprehensively, ensuring that it can generalize well to new, unseen data. Through this rigorous validation, the effectiveness of the MLET method in achieving precise and reliable indoor localization is demonstrated, confirming that it is both theoretically sound and practically effective.
The Localization by Optimization (LBO) method represents a distinctive approach to indoor positioning, focusing on the optimization paradigm to accurately determine the transmitter’s location. This method begins with the collection of UWB (Ultra-WideBand) measurements, which include distances from multiple anchors to the transmitter. Ensuring the accuracy and consistency of these measurements is crucial, as the quality of the data directly impacts the performance of the LBO algorithm. This data collection process involves advanced synchronization and calibration techniques to ensure that all measurements are temporally aligned and accurate.
Once the data is collected, the core of the LBO method lies in the formulation of an objective function. This function is constructed by defining residuals that represent the difference between the measured distances and the theoretical distances calculated based on the current estimated position of the transmitter. Mathematically, the residual for each anchor i is given by:
where are the coordinates of anchor i, are the coordinates of transmitter, and is the measured distance between the anchor and transmitter. In an ideal case, these residuals would vanish for the correct coordinates of . We do not have an ideal measurement; therefore, these quantities are non-zero. Then, the squares of defined residuals are summed up, which gives us the objective function:
which is summed over all anchors that are present in the system.
This objective function quantifies the overall discrepancy between the measured and theoretical distances, and the goal of the LBO method is to minimize this function to find the optimal transmitter location.
To minimize the objective function, various optimization techniques can be employed [29,30]. One common approach is gradient descent, which iteratively adjusts the estimated coordinates of the transmitter to reduce the objective function. In each iteration, the gradient of the objective function with respect to the transmitter coordinates is computed, and the coordinates are updated in the direction that decreases the objective function. This process continues until the changes in the objective function become negligible, indicating that an optimal solution has been found.
The validation process of the LBO method is critical to ensuring its robustness and accuracy. This involves testing the algorithm with diverse datasets that simulate various real-world conditions, including different spatial configurations and environmental scenarios. Hold One Out validation techniques are employed to assess the algorithm’s performance, wherein the dataset is divided into train and test set. By rigorously validating the LBO method across different conditions, its practical effectiveness in achieving precise and reliable indoor localization is demonstrated.
The LBO method offers several advantages, including its ability to handle complex environments where direct line-of-sight measurements may not always be available. By optimizing the overall discrepancy across all measurements, LBO can effectively mitigate the impact of non-line-of-sight conditions and other sources of measurement noise. Additionally, the flexibility in choosing different optimization techniques allows the LBO method to be tailored to specific applications and computational resources, making it a versatile solution for various indoor localization challenges.
3. Measurement Methodology
The time-of-flight analysis used in the system is based on the knowledge of two parameters: the time required for wireless data exchange between devices and the knowledge of the speed of the electromagnetic wave characteristic of propagation in a given medium. For obvious reasons, this will usually be vacuum or air, but equally important at certain times may be the knowledge of the dependence on contact with obstacles such as terrain obstacles, architectural buildings, or simply the human factor. This relationship, in its simplest form, can be written as a formula [31]:
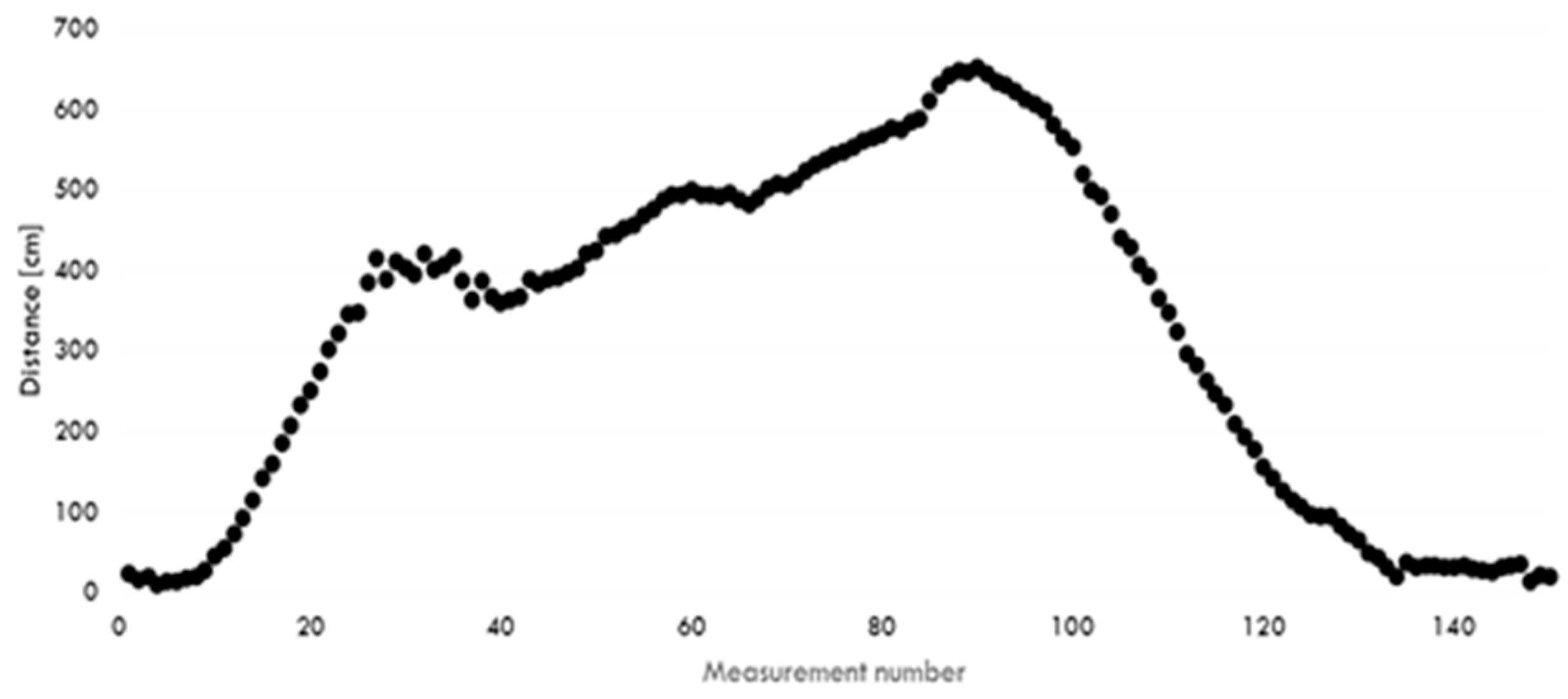
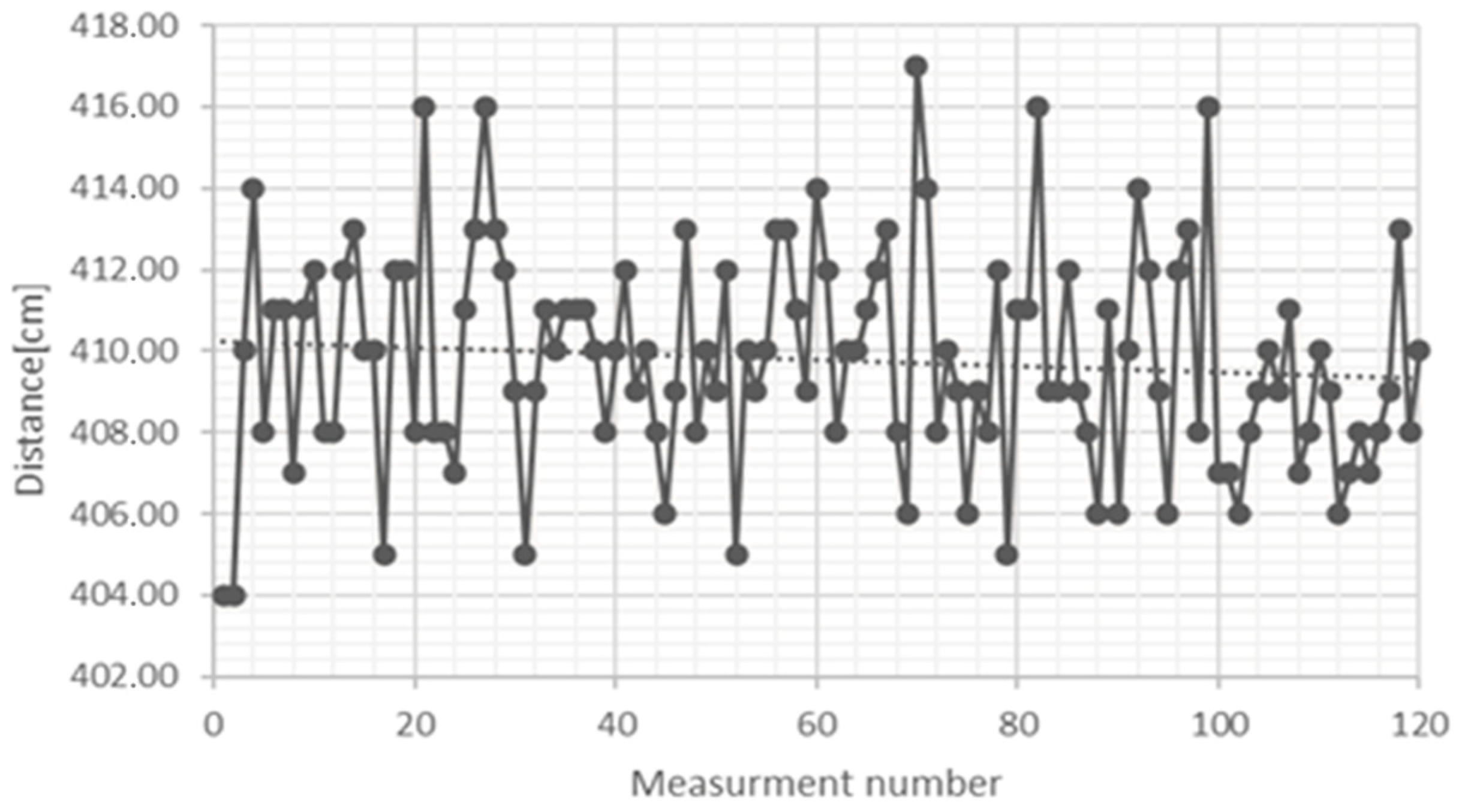
where d is the distance between device A and B, c is the speed of light for the particular case of the medium in which it propagates, while t1 and t2 are the time stamps, with t1 being the start of the measurement and t2 its end. The resulting distance is the first and basic starting information for the computational algorithms and machine learning mechanisms based on which the object will be located. The more such reference points the system obtains in relation to a specific marker, the smaller the uncertainty resulting from the current location will be. However, the readings must result from devices correctly calibrated in terms of hardware and software [32]. To improve subsequent analysis on cases consisting of multiple readings for each device, the variation of the signal over time was tracked and presented itself as shown in Figure 5 and Figure 6. The graph in Figure 5 shows the variation of the measured distance information returned by the marker and anchor as a function of the measurement number for an object in motion. The graph in Figure 6 was made for a non-moving object. This checked the variance of the received results.
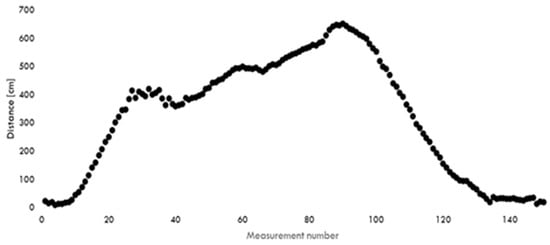
Figure 5.
Graph of the measured distance as a function of the measurement number for an object in motion.
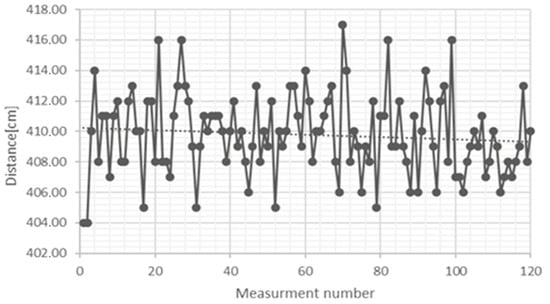
Figure 6.
Plot of the variation of the measured distance as a function of the measurement number for a stationary object.
In this case (second graph), for the first 120 samples, it was found that the difference between the global extremes is usually around 10 cm, which, for several axes and one plane, initially allows the tracking of small objects whose size does not necessarily exceed a few cm.
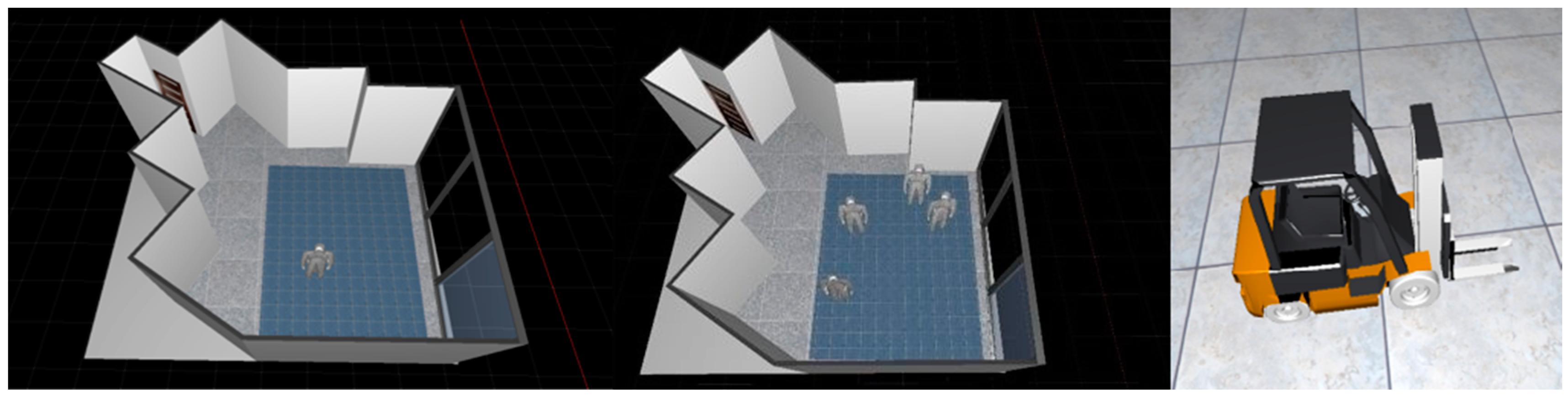
To perform more complex tests, a real test environment was prepared in which the equipment was installed. This was done by choosing a room with a complex shape to gradually increase the model’s complexity and assess the impact of architectural obstacles on the performance of the designed devices. Testing of the prototypes were conducted with the largest possible area, a 5 m × 4 m rectangle. Models showing the entire room and the object models used are shown in Figure 7.
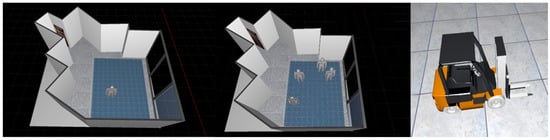
Figure 7.
Virtual models of the test room with active tracking of one object (left), with active tracking of four objects (center) and an alternative model of the tracked object (right).
Tripods set at a height of 120 cm were used to position the anchors in the room. This took into account the significant effect of the human body on the propagation speed of the electromagnetic wave in the room. This is due to the high water content of the human body. This height is due to the concentration of matter at this height (waist to mid-torso) for an average human height. In the context of transmission methods, water can be a hard barrier to EM waves. However, in the case under consideration (a time-distance measurement method), there are multiple changes in wave speed when passing through an obstacle, which is a strongly heterogeneous mixture of matter. The radiated wave may then undergo partial transition, refraction, or reflection, which considerably impacts the final measurement result. The same applies to tracking objects through other objects or walls with different intensities. A reference point consisting of an anchor and tripod in the given configuration is shown in Figure 8. The anchor prototype has been fitted with a dedicated enclosure (as has the marker), and on the right side of the anchor, you can see the power supply using a twisted-pair Ethernet cable with an RJ-45 connector and a PoE power supply.
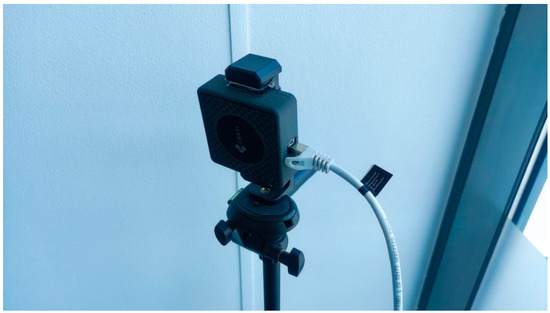
Figure 8.
Finished prototype of ultra-wideband anchor installed at reference point.
The Table 1 presents the results of measuring distances to an anchor using Ultra-Wideband (UWB) technology under two different scenarios: not covered and covered. This comparison was made to assess the impact of measurement interference factors. In the “Not covered” condition, where the measurements were taken without covering the transmitter with human body, the real measurements range from 0.50 m to 3.19 m. The corresponding UWB measurements show absolute errors ranging from 0.09 m to 0.25 m, indicating a relatively high accuracy of the UWB technology in unobstructed conditions. In the “Covered” condition, where the transmitter was covered with human body, the real measurements range from 0.31 m to 3.04 m. Under these conditions, the absolute errors are higher, ranging from 0.29 m to 0.40 m. This indicates that while UWB measurements remain reasonably accurate, the presence of obstructions such as human body increases the discrepancies between the real and measured distances. The comparison demonstrates the impact of measurement interference factors, highlighting the need for further calibration or algorithmic adjustments to maintain accuracy in the presence of such obstructions.

Table 1.
Measurement errors for two scenarios, with and without cover.
4. Results
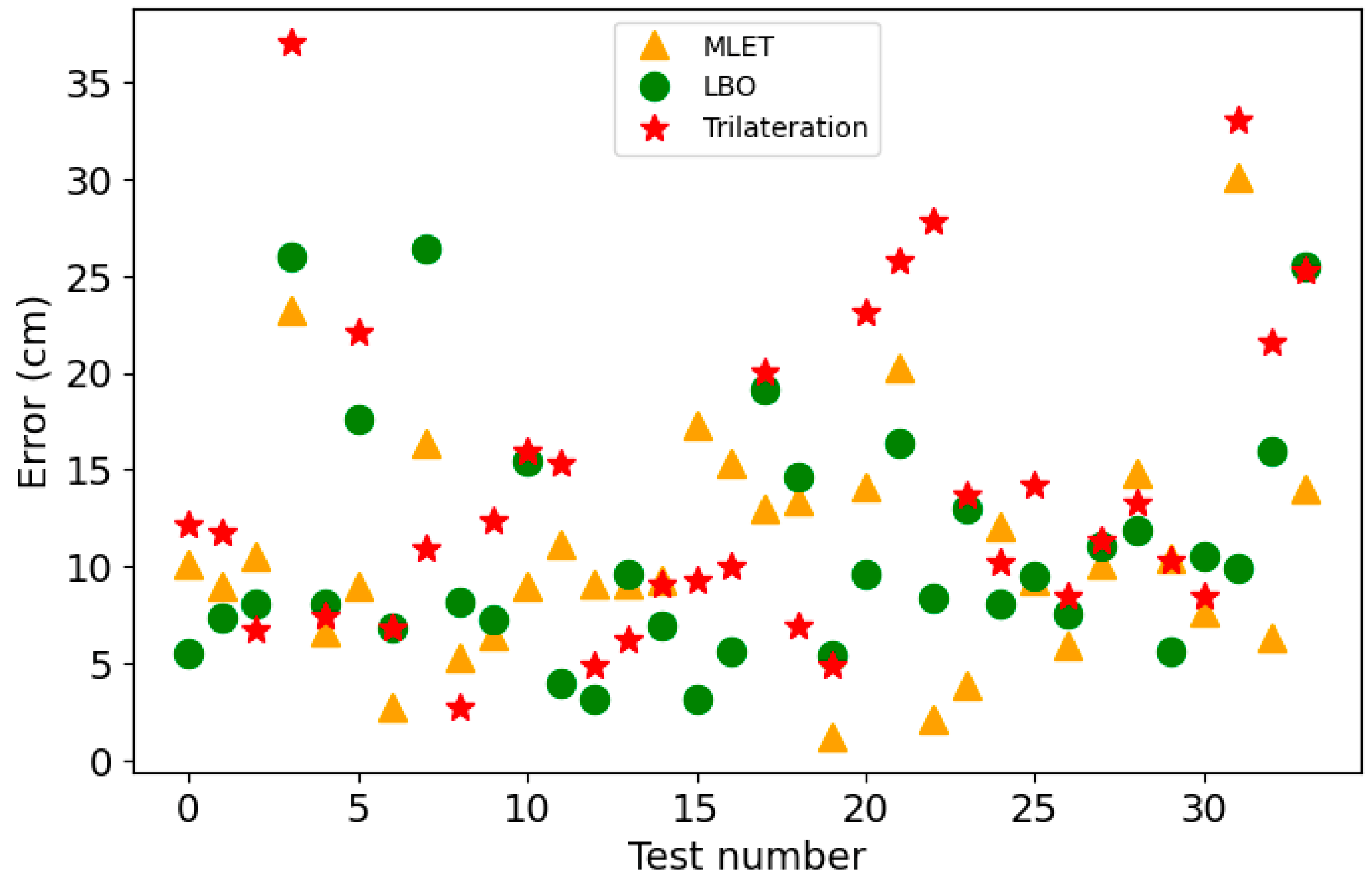
The comprehensive analysis of the results reveals a notable superiority of the recently introduced algorithms, namely Machine Learning Enhanced Trilateration (MLET) and Localization by Optimization (LBO), when compared to the conventional trilateration method. Figure 9 provides a detailed overview of the errors across various test cases, showcasing the enhanced performance of both MLET and LBO. The average error across the entire dataset underscores the effectiveness of these new algorithms, with MLET achieving an impressive mean error of 11.31 cm, closely followed by LBO with an average error of 11.66 cm. This represents a substantial improvement of approximately 25% compared to the mean error of 15.21 cm observed with standard trilateration.
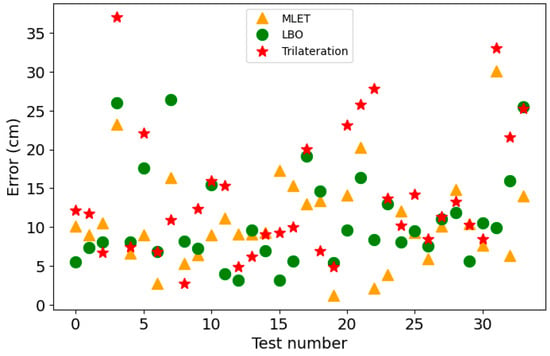
Figure 9.
Positioning errors for all three algorithms—the distance between the real and computed positions. For visualization, we picked cases where trilateration has solutions.
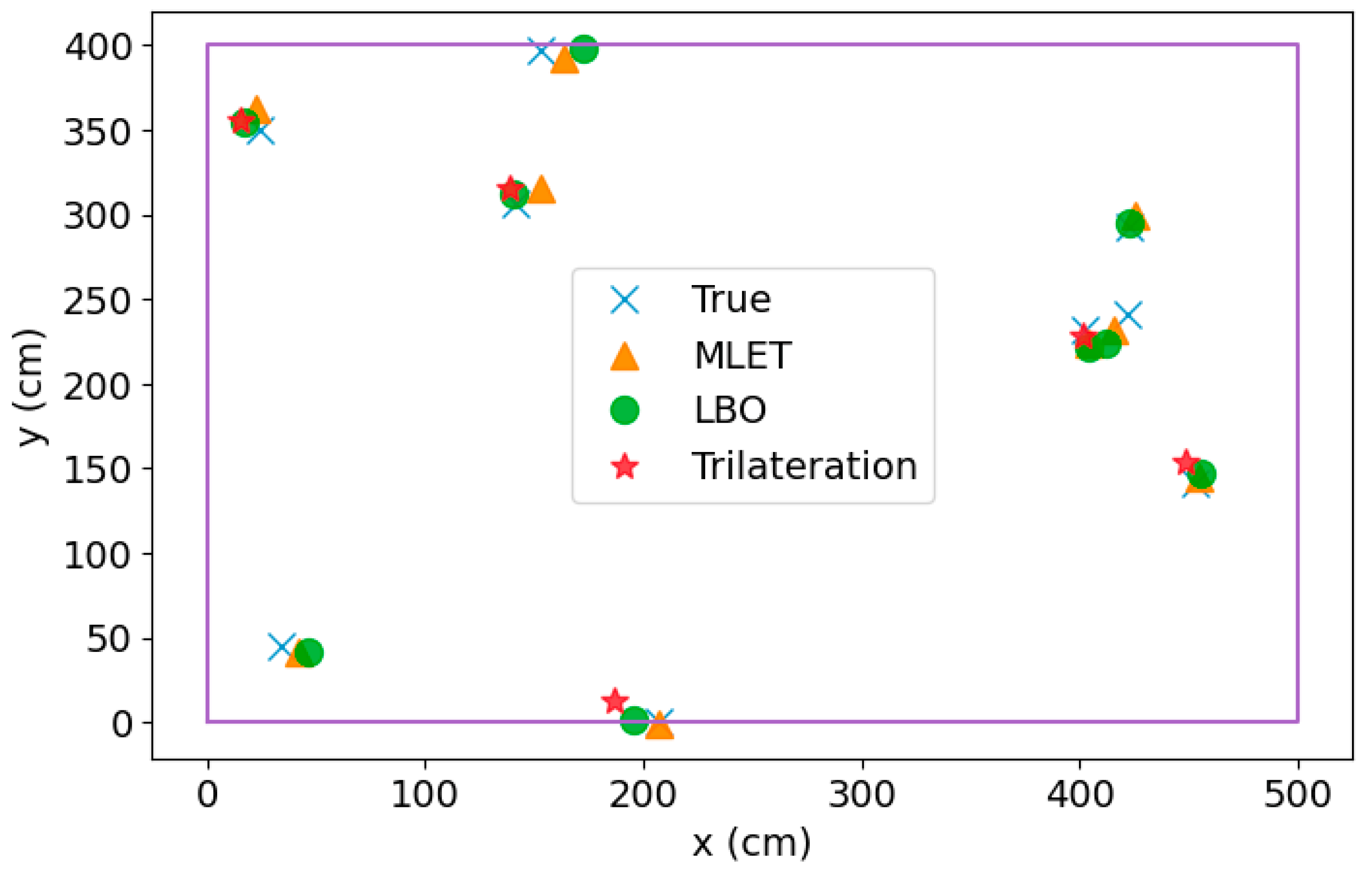
Beyond mere precision, the pivotal advantage of the newly proposed algorithms lies in their robustness. The inherent limitation of trilateration, notably its inability to provide solutions in the presence of significant measurement noise, is vividly illustrated in Figure 10. In this depiction, only 5 out of 9 results exhibit a trilateration solution. In stark contrast, MLET and LBO consistently deliver solutions for every sample in our dataset, highlighting their robust nature. This robust performance is of utmost importance, especially in practical applications like the production environment, where the inability to ascertain the transmitter’s position can have severe consequences.
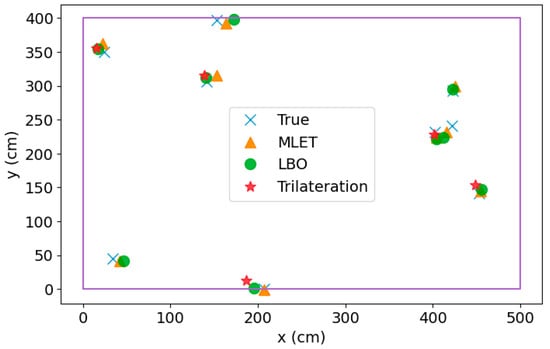
Figure 10.
Sample results of positioning algorithms. One can notice that trilateration does not always have a solution, which is the main reason for development of new algorithms.
The detailed examination of these results reaffirms the heightened accuracy of MLET and LBO and emphasizes their reliability in challenging scenarios characterized by substantial measurement noise. This robust performance positions the new algorithms as promising solutions for real-world applications, addressing a critical limitation inherent in traditional trilateration methods and ensuring precision and consistent performance in diverse and demanding operational environments.
5. Discussion
The presented study delves into indoor localization using ultra-wideband (UWB) technology, addressing the crucial challenges associated with signal distortion, energy efficiency, and robustness in complex environments. The system, tailored for goods positioning in warehouse management, integrates temporal analysis techniques, specifically Time of Flight (ToF), coupled with UWB transmitter technology to achieve exceptional accuracy in distance determination. The implementation involves proprietary UWB tags and anchors, forming a network capable of real-time object orientation within a given space. Utilizing UWB technology, including protocols like Bluetooth, ZigBee, Wi-Fi, and LoRa, is pivotal in achieving precise indoor positioning. The system’s design focuses on overcoming limitations in traditional trilateration methods, particularly in scenarios with significant measurement noise or signal distortion due to reflections and refractions. The study introduces two fundamental devices, the UWB anchor, and the UWB tag, designed for energy efficiency and miniaturization. The anchor, equipped with a UWB transceiver chip, microcontroller, and Ethernet controller, ensures versatile installation options. The compact UWB tag, designed for easy object attachment, incorporates an accelerometer for marker trip conditioning and supports additional sensors for environmental parameter monitoring. The research emphasizes the challenges of signal distortion due to reflections and refractions. The system addresses this by introducing proprietary algorithms, such as machine learning enhanced trilateration (MLET) and localization by optimization (LBO). These algorithms stabilize results, increase measurement precision, and ensure reliable performance despite environmental complexities.
Comparative analysis of the proposed algorithms (MLET and LBO) against standard trilateration reveals superior accuracy and robustness. MLET and LBO consistently outperform trilateration, as demonstrated by lower average errors and the ability to provide solutions for all samples in the dataset, even in challenging conditions with significant measurement noise. The discussion extends to the real-world applicability of the system, emphasizing its potential role in optimizing facility operations in terms of energy and time. The energy-saving mechanisms, inherent in both the system and hardware solutions, align with the broader goal of achieving ecological and efficient warehouse management.
While the proposed indoor localization system leveraging ultra-wideband (UWB) technology and sophisticated algorithms (MLET and LBO) demonstrates notable advantages, it is crucial to acknowledge certain limitations. The first limitation concerns the system’s strong dependency on specific UWB tags and anchors. The system’s efficacy is contingent upon the functionality and endurance of these hardware components, and any shortcomings, such as limited battery life, could directly impact the overall performance and practicality of the system. Scalability poses another challenge. As the number of tracked objects, or tags, increases, so does the system load. The potential scalability issues must be carefully considered, including the impact on overall performance and the potential necessity for additional computational resources to handle the increased load. Environmental factors can significantly influence the system’s performance. Interference from other wireless devices, obstacles such as walls or large objects, and variations in the physical environment may introduce challenges and diminish the system’s accuracy. Real-world environments, particularly those with intricate structures and dynamic conditions, present challenges for any localization system. The system’s ability to adapt to dynamic changes, such as moving obstacles or environmental alterations, needs thorough evaluation. Accurate calibration of both hardware and software components is critical for the system’s precision. Any deviations from calibration standards may introduce errors in distance measurements, compromising the system’s overall accuracy.
6. Conclusions
The paper underscores the effectiveness of employing ultra-wideband (UWB) technology for indoor localization, recognizing its pivotal role in achieving exceptional accuracy in distance determination. Specifically tailored for warehouse management, the system’s capability to furnish real-time Cartesian coordinates for tracked goods emerges as a noteworthy contribution, promising optimization within logistics and overall operational efficiency. Innovative strides in hardware solutions, encompassing UWB tags and anchors, are highlighted. The focus on energy efficiency and miniaturization, coupled with the integration of additional sensors for environmental monitoring, showcases a comprehensive approach designed to address the diverse needs of various market sectors.
Despite inherent challenges in indoor localization, such as signal distortion and measurement noise, the paper underscores the triumphant performance of proprietary algorithms. Notably, Machine Learning Enhanced Trilateration (MLET) and Localization by Optimization (LBO) successfully navigate these challenges, elevating the stability and precision of the system. A comparative analysis accentuates the robustness and accuracy of MLET and LBO when juxtaposed with the traditional trilateration method. These novel algorithms consistently outshine trilateration, furnishing more reliable solutions even with significant measurement noise—an invaluable advantage for practical applications. The system’s adaptability to real-world scenarios is a recurring theme, particularly its potential to optimize facility operations concerning energy and time. The integrated energy-saving mechanisms, both within the system and in the hardware solutions, align with broader ecological and efficient warehouse management objectives.
The conclusion expresses confidence in the system’s practical viability and emphasizes the necessity for continuous development and refinement. Future research directions are proposed, encompassing scalability considerations, algorithmic optimization, and potential integrations with other technologies. The demonstrated accuracy, robustness, and adaptability position the proposed indoor localization system as a valuable asset in warehouse management’s dynamic and challenging environments.
Author Contributions
Hardware and implementation, D.G., M.S. and P.A.; Concept of system, measurement methodology, image reconstruction and supervision, D.M., J.S. and R.P.; Preparation of paper, development of research methodology, documentation and numerical methods, literature review, S.S., M.S.-S. and O.I.; Algorithms, machine learning and computing, D.M., J.S. and R.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Elsanhoury, M.; Mäkelä, P.; Koljonen, J.; Välisuo, P.; Shamsuzzoha, A.; Mantere, T.; Elmusrati, M.; Kuusniemi, H. Precision Positioning for Smart Logistics Using Ultra-Wideband Technology-Based Indoor Navigation: A Review. IEEE Access 2022, 10, 44413–44445. [Google Scholar] [CrossRef]
- Pabich, M.; Gajowiak, M. Universal design—Bluetooth Low Energy-based navigation information systems for people with disabilities. Builder 2022, 26, 32–35. [Google Scholar] [CrossRef]
- Kamilov, D.R. Application of ZigBee technology in IoT. Int. J. Adv. Sci. Res. 2023, 3, 343–349. [Google Scholar] [CrossRef]
- Khan, G.M.; Huda, N.U.; Zaman, U.K.U. Smart Warehouse Management System: Architecture, Real-Time Implementation and Prototype Design. Machines 2022, 10, 150. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, L.; Liu, Y.; Ding, Y.; Yang, S.; Li, H. Design and Implementation of Real-Time Localization System (RTLS) Based on UWB and TDoA Algorithm. Sensors 2022, 22, 4353. [Google Scholar] [CrossRef]
- Maciura, Ł.; Cieplak, T.; Pliszczuk, D.; Maj, M.; Rymarczyk, T. Autonomous Face Classification Online Self-Training System Using Pretrained ResNet50 and Multinomial Naïve Bayes. Sensors 2023, 23, 5554. [Google Scholar] [CrossRef]
- Wang, F.; Tang, H.; Chen, J. Survey on NLOS Identification and Error Mitigation for UWB Indoor Positioning. Electronics 2023, 12, 1678. [Google Scholar] [CrossRef]
- Kozłowski, E.; Borucka, A.; Oleszczuk, P.; Jałowiec, T. Evaluation of the maintenance system readiness using the semi-Markov model taking into account hidden factors. Eksploat. Niezawodn.–Maint. Reliab. 2023, 25, 172857. [Google Scholar] [CrossRef]
- Pawlik, P.; Kania, K.; Przysucha, B. Fault Diagnosis of Machines Operating in Variable Conditions Using Artificial Neural Network Not Requiring Training Data from a Faulty Machine. Eksploat. Niezawodn.–Maint. Reliab. 2023, 25, 168109. [Google Scholar] [CrossRef]
- Drzymała, A.J.; Korzeniewska, E. Analysis of the profitability of a photovoltaic investment by private investors depending on the level of self-consumption of the energy produced in the amended RES Act in Poland. Przegląd Elektrotechniczny 2023, 99, 298–302. [Google Scholar] [CrossRef]
- Krawczyk, A.; Korzeniewska, E. Some aspects of electromagnetic field shielding. Przegląd Elektrotechniczny 2023, 99, 128–131. [Google Scholar] [CrossRef]
- Styła, M.; Adamkiewicz, P. Implementation of a commercial PAN network in the tracking system using the techniques of radio tomographic imaging. J. Phys. Conf. Ser. 2022, 2408, 012009. [Google Scholar] [CrossRef]
- Arulkumar, V.; Sridhar, S.; Kalpana, G.; Guruprakash, K.S. Real-Time Big Data Analytics for Improving Sales in the Retail Industry via the Use of Internet of Things Beacons. In Lecture Notes in Networks and Systems; Springer Nature: Singapore, 2022; Volume 444. [Google Scholar] [CrossRef]
- Gao, X.; Sadjadpour, H.R.; Dowla, F.U.; Nekoogar, F. Optimal Communication System with Power Control and Ultra-Wideband Propagation Channel Model Designs for Monitoring Harsh Through-Wall Environments. IEEE Access 2024, 12, 56226–56239. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, J.; Yang, J. Exploiting Anchor Links for NLOS Combating in UWB Localization. ACM Trans. Sens. Netw. 2024, 20, 3. [Google Scholar] [CrossRef]
- Arias-de-Reyna, E.; Mengali, U. A Maximum Likelihood UWB Localization Algorithm Exploiting Knowledge of the Service Area Layout. Wirel. Pers. Commun. 2013, 69, 1413–1426. [Google Scholar] [CrossRef]
- Leitinger, E.; Fröhle, M.; Meissner, P.; Witrisal, K. Multipath-Assisted Maximum-Likelihood Indoor Positioning Using UWB Signals. In Proceedings of the 2014 IEEE International Conference on Communications Workshops (ICC), Sydney, NSW, Australia, 10–14 June 2014; pp. 170–175. [Google Scholar]
- Liu, Y.; Han, F.; He, J. A Particle Filter-Based Ultra-Wideband Indoor Localization Optimization Algorithm. In Proceedings of the 2023 IEEE 9th International Conference on Cloud Computing and Intelligent Systems (CCIS), Dali, China, 12–13 August 2023; pp. 277–283. [Google Scholar]
- Huang, S.-Y.; Huang, H.-Y.; Chong, H.Y.; Jiang, J.-B.; Leu, J.-S.; Vitek, S. A Directional Particle Filter-Based Multi-Floor Indoor Positioning System. IEEE Access 2022, 10, 116317–116325. [Google Scholar] [CrossRef]
- Lee, G.T.; Seo, S.B.; Jeon, W.S. Indoor Localization by Kalman Filter Based Combining of UWB-Positioning and PDR. In Proceedings of the 2021 IEEE 18th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2021; pp. 1–6. [Google Scholar]
- Lu, N.; Gao, Z. Ultra Wideband Indoor Positioning Method Based on Kalman Filter and Taylor Algorithm. In Proceedings of the 2022 4th International Conference on Intelligent Control, Measurement and Signal Processing (ICMSP), Hangzhou, China, 8–10 July 2022; pp. 910–914. [Google Scholar]
- Kłosowski, G.; Rymarczyk, T.; Niderla, K.; Kulisz, M.; Skowron, Ł.; Soleimani, M. Using an LSTM network to monitor industrial reactors using electrical capacitance and impedance tomography—A hybrid approach. Eksploat. Niezawodn.–Maint. Reliab. 2023, 25, 1–11. [Google Scholar] [CrossRef]
- Baran, B.; Kozłowski, E.; Majerek, D.; Rymarczyk, T.; Soleimani, M.; Wójcik, D. Application of Machine Learning Algorithms to the Discretization Problem in Wearable Electrical Tomography Imaging for Bladder Tracking. Sensors 2023, 23, 1553. [Google Scholar] [CrossRef] [PubMed]
- Wymeersch, H.; Marano, S.; Gifford, W.M.; Win, M.Z. A Machine Learning Approach to Ranging Error Mitigation for UWB Localization. IEEE Trans. Commun. 2012, 60, 1719–1728. [Google Scholar] [CrossRef]
- Che, F.; Ahmed, A.; Ahmed, Q.Z.; Zaidi, S.A.R.; Shakir, M.Z. Machine Learning Based Approach for Indoor Localization Using Ultra-Wide Bandwidth (UWB) System for Industrial Internet of Things (IIoT). In Proceedings of the 2020 International Conference on UK-China Emerging Technologies (UCET), Glasgow, UK, 20–21 August 2020; pp. 1–4. [Google Scholar]
- Styła, M.; Kiczek, B.; Kłosowski, G.; Rymarczyk, T.; Adamkiewicz, P.; Wójcik, D.; Cieplak, T. Machine Learning-Enhanced Radio Tomographic Device for Energy Optimization in Smart Buildings. Energies 2023, 16, 275. [Google Scholar] [CrossRef]
- Niu, Z.; Yang, H.; Zhou, L.; Farag Taha, M.; He, Y.; Qiu, Z. Deep Learning-Based Ranging Error Mitigation Method for UWB Localization System in Greenhouse. Comput. Electron. Agric. 2023, 205, 107573. [Google Scholar] [CrossRef]
- Jang, B.; Kim, H.; Kim, J.W. Survey of Landmark-based Indoor Positioning Technologies. Inf. Fusion 2023, 89, 166–188. [Google Scholar] [CrossRef]
- Fahim, A. A varied density-based clustering algorithm. J. Comput. Sci. 2023, 66, 101925. [Google Scholar] [CrossRef]
- Kerr, C.C.; Dura-Bernal, S.; Smolinski, T.G.; Chadderdon, G.L.; Wilson, D.P. Optimization by Adaptive Stochastic Descent. PLoS ONE 2018, 13, e0192944. [Google Scholar] [CrossRef] [PubMed]
- Herbruggen, B.V.; Gerwen, J.V.V.; Luchie, S.; Durodié, Y.; Vanderborght, B.; Aernouts, M.; Munteanu, A.; Fontaine, J.; Poorter, E.D. Selecting and Combining UWB Localization Algorithms: Insights and Recommendations from a Multi-Metric Benchmark. IEEE Access 2024, 12, 16881–16901. [Google Scholar] [CrossRef]
- Gnaś, D.; Adamkiewicz, P. Precise indoor location system using Ultra-Wideband technology. Przegląd Elektrotechniczny 2023, 99, 270. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).